Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
論文紹介 "ReSim: Reliable World Simulation for Auto...
Search
Takuma Kogo
April 02, 2026
Research
700
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
論文紹介 "ReSim: Reliable World Simulation for Autonomous Driving"
NeurIPS2025 spotlight論文
Takuma Kogo
April 02, 2026
Other Decks in Research
See All in Research
老舗ものづくり企業でリサーチが変革を起こすまで - 三菱重工DXの実践
skydats
0
220
GLIM とMegaParticles:正規分布近似の限界とタイトカップリング&パーティクルフィルタの進展 / GLIM and MegaParticles : Progress of the distribution representation in SLAM
koide3
0
590
NLP colloquium: AI Safety Survey
kanekomasahiro
0
850
多様なデータを許容し学習し続ける模倣学習 / Advanced Imitation Learning for VLA
prinlab
0
240
LLM の Attention 機構まとめ — 数式・計算量・メモリ
puwaer
8
2.3k
SOTAのさらに先へ:厳しい推論制約下での高性能モデルのPost-Training
analokmaus
0
1.4k
【中間報告】国会議員の立法・政策実務を支える環境を巡る現状と課題
polipoli
0
320
羽田新ルート運用6年の検証
1manken
0
170
長時間動画QAにおけるマルチエージェント推論 ・SVAgent: Storyline-Guided Long Video Understanding via Cross-Modal Multi-Agent Collaboration
murakawatakuya
1
160
JICA QUEST 共創×革新プログラム Impact Report(海ノ向こうコーヒー)
ontheslope
0
200
AY 2026 Guide to Academic Writing Using Generative AI - Workshop
ks91
PRO
0
130
AIで最適化を解けるか?
mickey_kubo
0
140
Featured
See All Featured
A better future with KSS
kneath
240
18k
Redefining SEO in the New Era of Traffic Generation
szymonslowik
1
360
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
280
Connecting the Dots Between Site Speed, User Experience & Your Business [WebExpo 2025]
tammyeverts
11
970
Data-driven link building: lessons from a $708K investment (BrightonSEO talk)
szymonslowik
1
1.2k
Unsuck your backbone
ammeep
672
58k
For a Future-Friendly Web
brad_frost
183
10k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
220
Leadership Guide Workshop - DevTernity 2021
reverentgeek
1
320
10 Git Anti Patterns You Should be Aware of
lemiorhan
PRO
659
62k
Introduction to Domain-Driven Design and Collaborative software design
baasie
1
900
Transcript
AI Community 2026.01.29 向後 卓磨 GOドライブ株式会社 論文紹介 ReSim: Reliable World
Simulation for Autonomous Driving
紹介する論文 大量の実データ 安全走行 少量のシミュレーションデータ 危険走行 ▪ “ReSim: Reliable World Simulation
for Autonomous Driving” [1] ▪ NeurIPS’25 Spotlight論文 ▪ 自動運転における世界モデルの一活用形態/学習方法を提案 学習 動画 予測 軌道計画を入力 衝突するような 軌道計画でも 妥当な映像を予測 従来手法 提案手法 十分に曲がってくれない
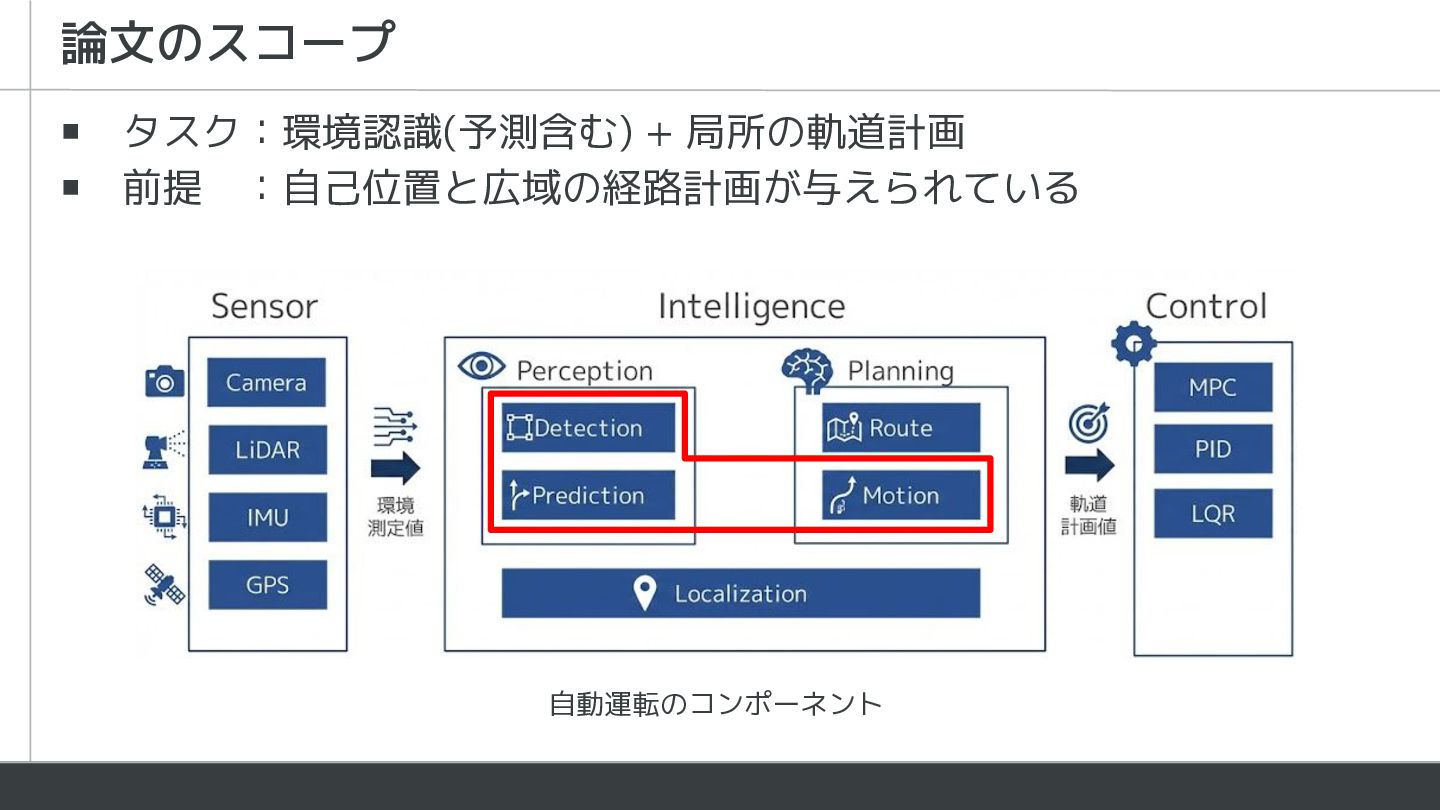
論文のスコープ ▪ タスク:環境認識(予測含む) + 局所の軌道計画 ▪ 前提 :自己位置と広域の経路計画が与えられている 自動運転のコンポーネント
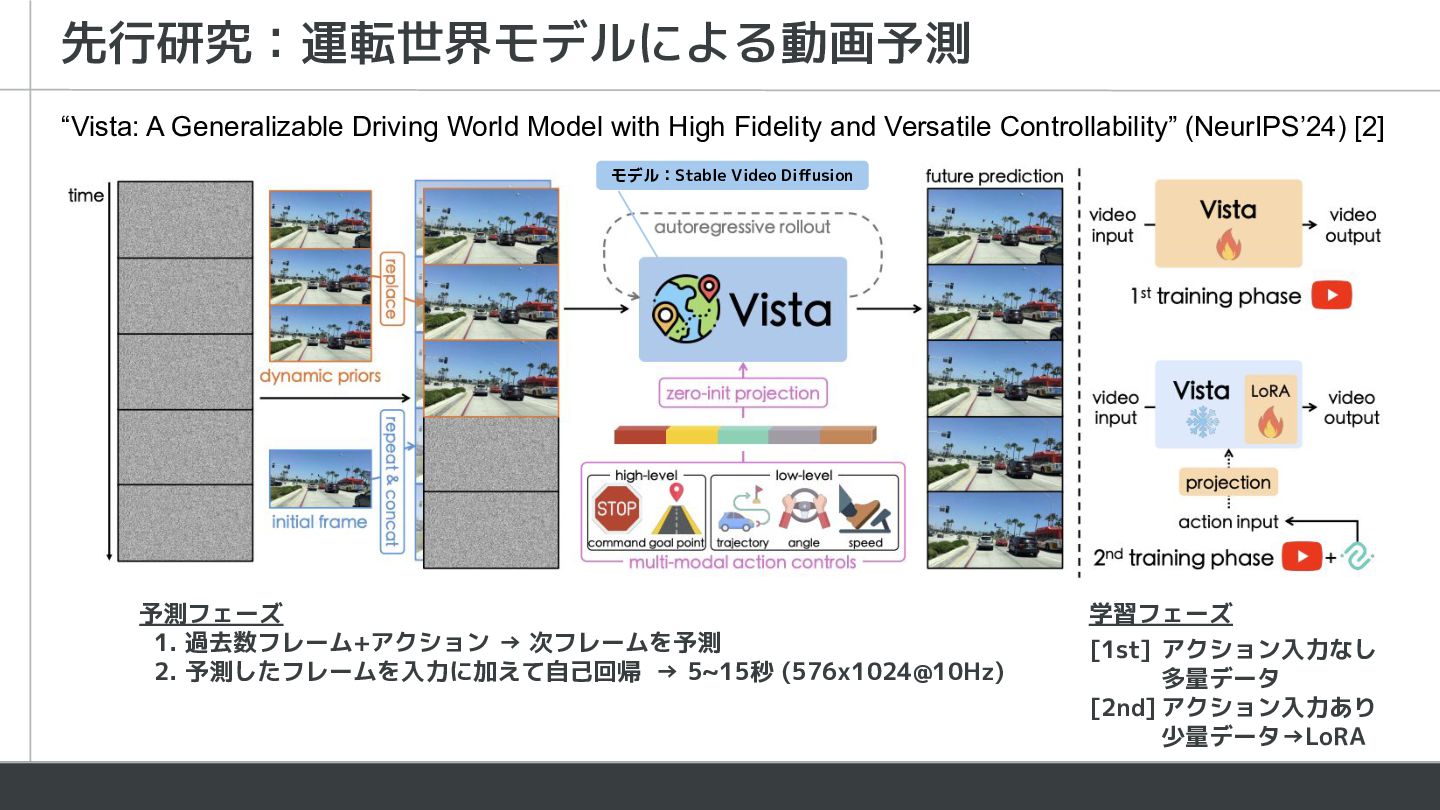
先行研究:運転世界モデルによる動画予測 “Vista: A Generalizable Driving World Model with High Fidelity
and Versatile Controllability” (NeurIPS’24) [2] 学習フェーズ [1st] アクション入力なし 多量データ [2nd] アクション入力あり 少量データ→LoRA 予測フェーズ 1. 過去数フレーム+アクション → 次フレームを予測 2. 予測したフレームを入力に加えて自己回帰 → 5~15秒 (576x1024@10Hz) モデル:Stable Video Diffusion
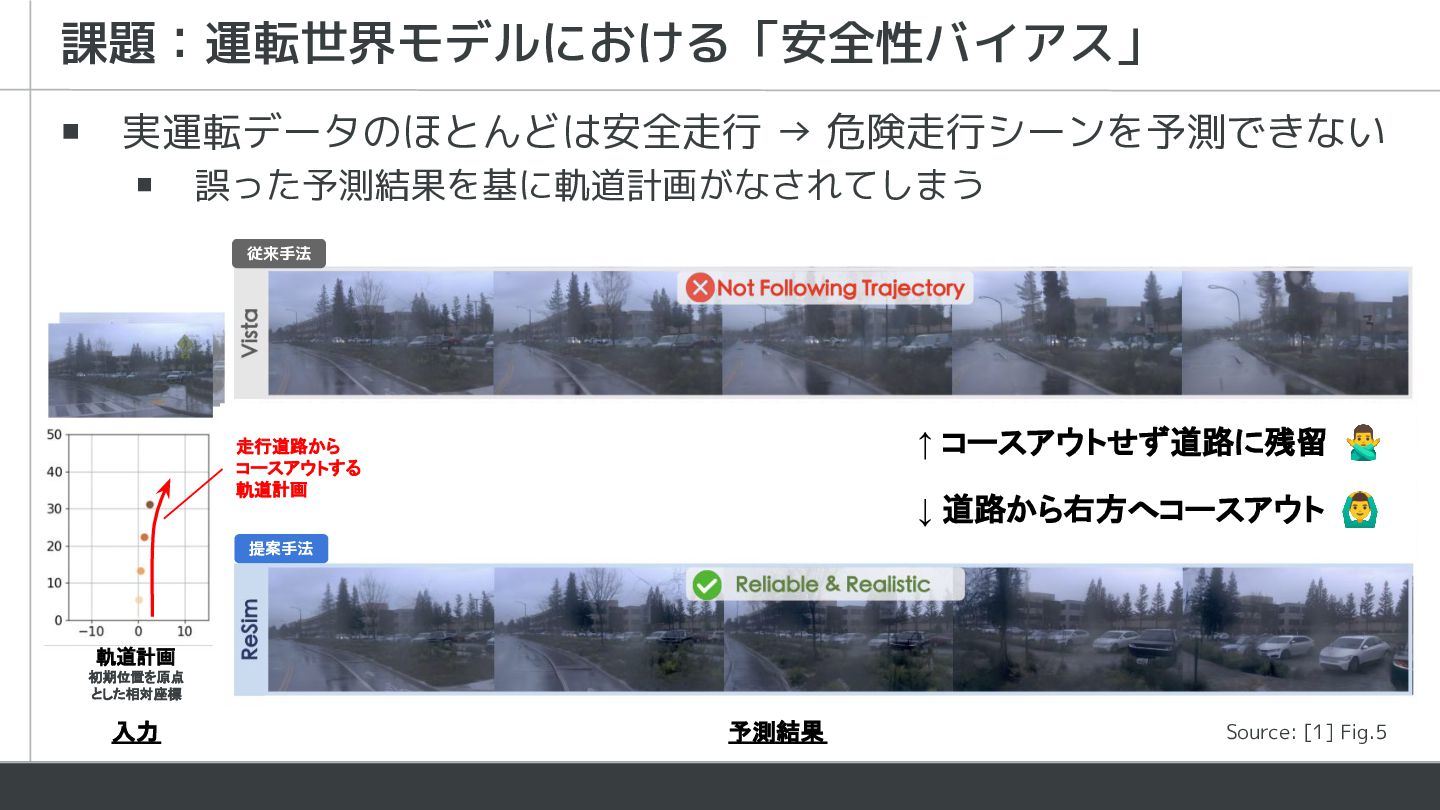
課題:運転世界モデルにおける「安全性バイアス」 入力 予測結果 ↑ コースアウトせず道路に残留 ↓ 道路から右方へコースアウト 従来手法
提案手法 軌道計画 初期位置を原点 とした相対座標 ▪ 実運転データのほとんどは安全走行 → 危険走行シーンを予測できない ▪ 誤った予測結果を基に軌道計画がなされてしまう 走行道路から コースアウトする 軌道計画 Source: [1] Fig.5
提案手法 ▪ 動画予測:少量のシミュレーションデータを加えて運転世界モデルを学習 ▪ 軌道計画:シミュレーションデータで学習したVideo2Reward 運転動画から 運転の良し悪しを 推定するモデル Source: [1]
Fig.1
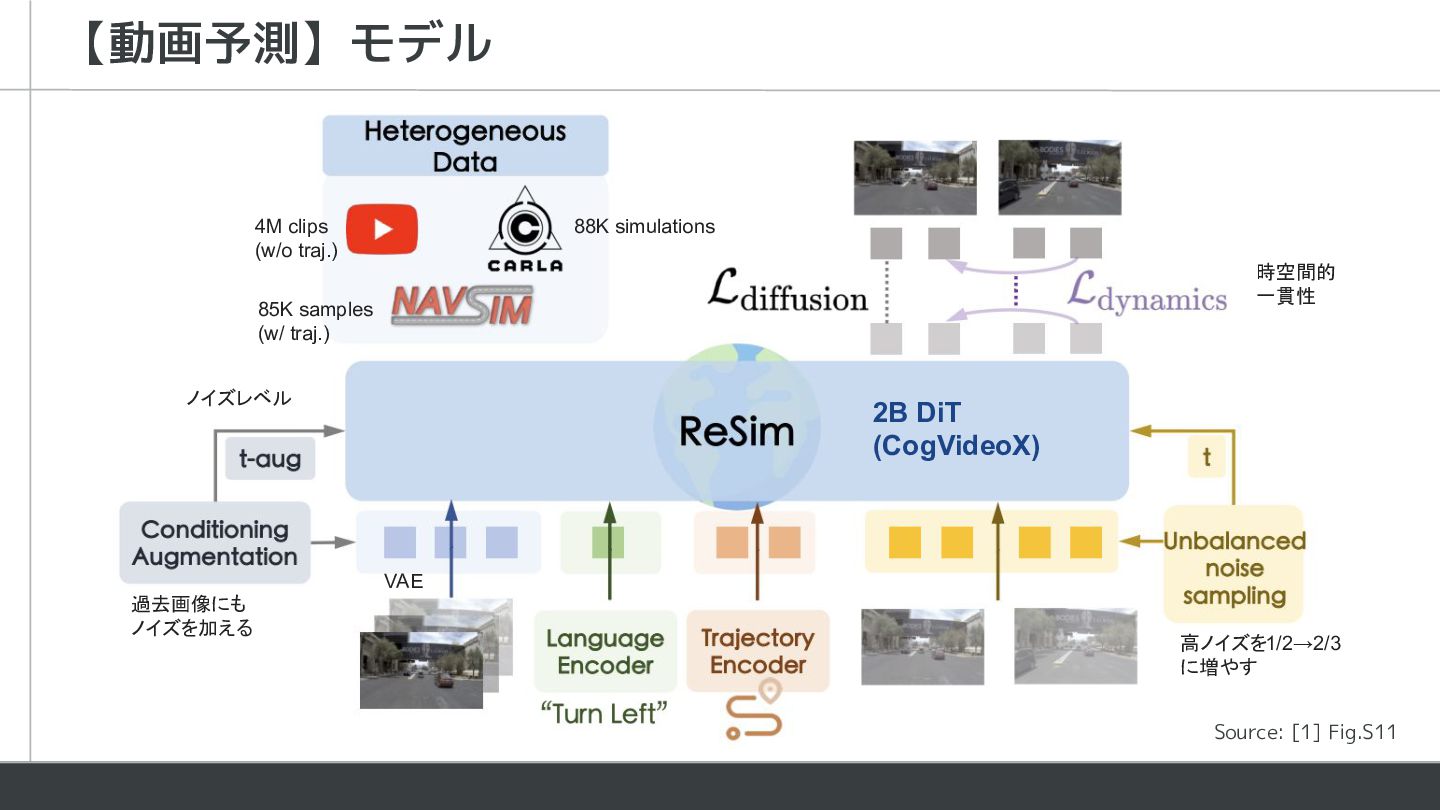
【動画予測】モデル 2B DiT (CogVideoX) 過去画像にも ノイズを加える ノイズレベル 時空間的 一貫性 高ノイズを1/2→2/3
に増やす 4M clips (w/o traj.) 85K samples (w/ traj.) 88K simulations VAE Source: [1] Fig.S11
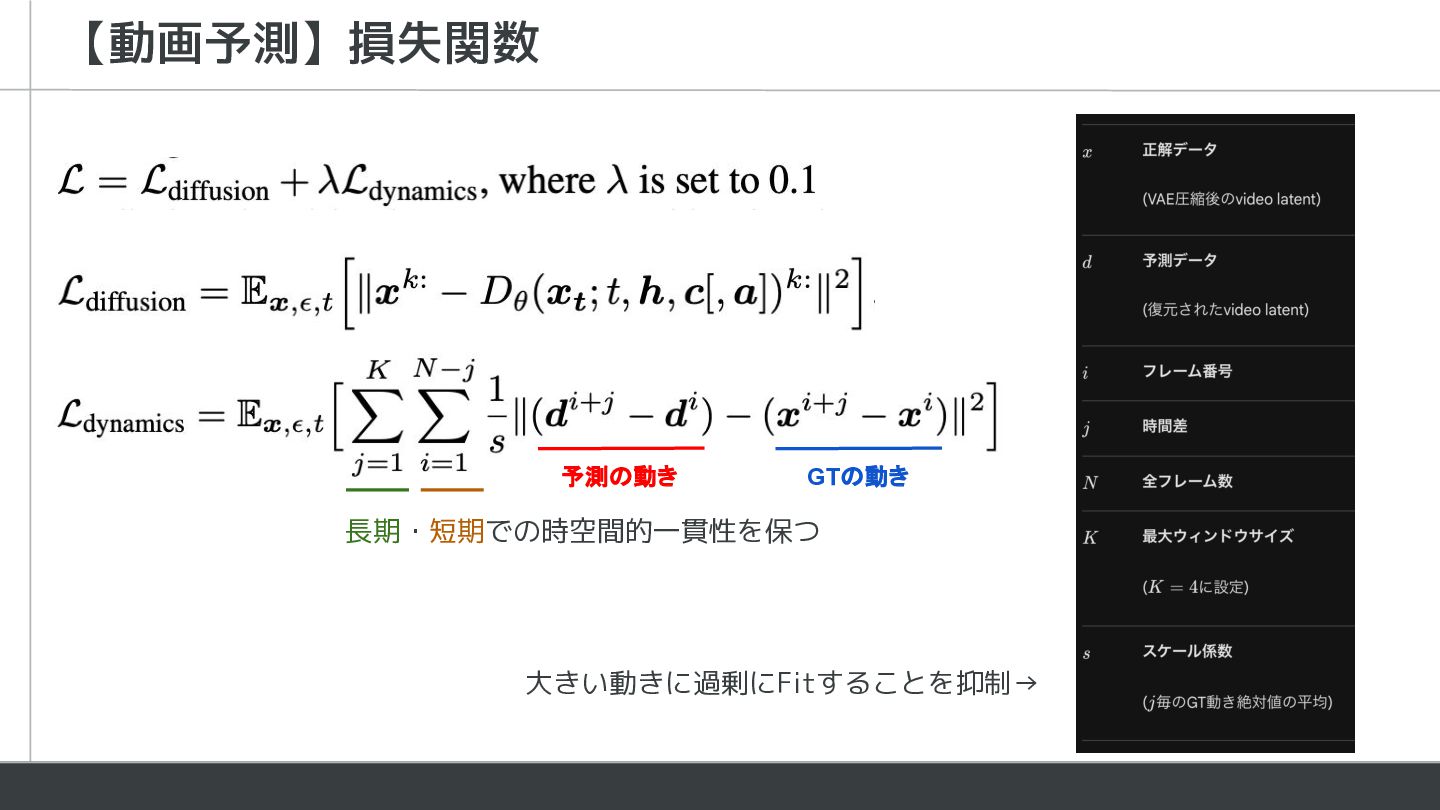
【動画予測】損失関数 GTの動き 予測の動き 長期・短期での時空間的一貫性を保つ 大きい動きに過剰にFitすることを抑制→
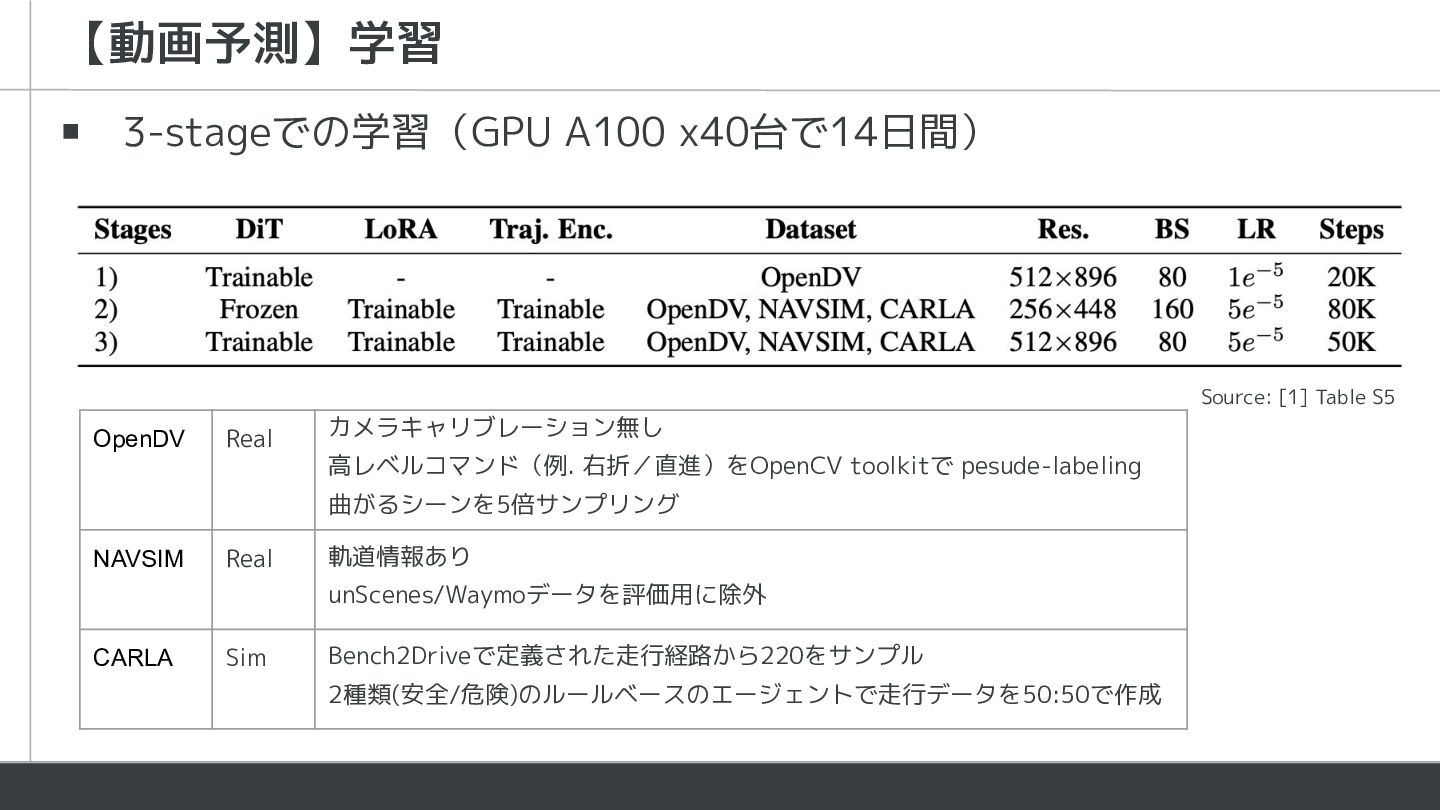
【動画予測】学習 OpenDV Real カメラキャリブレーション無し 高レベルコマンド(例. 右折/直進)をOpenCV toolkitで pesude-labeling 曲がるシーンを5倍サンプリング NAVSIM
Real 軌道情報あり unScenes/Waymoデータを評価用に除外 CARLA Sim Bench2Driveで定義された走行経路から220をサンプル 2種類(安全/危険)のルールベースのエージェントで走行データを50:50で作成 ▪ 3-stageでの学習(GPU A100 x40台で14日間) Source: [1] Table S5
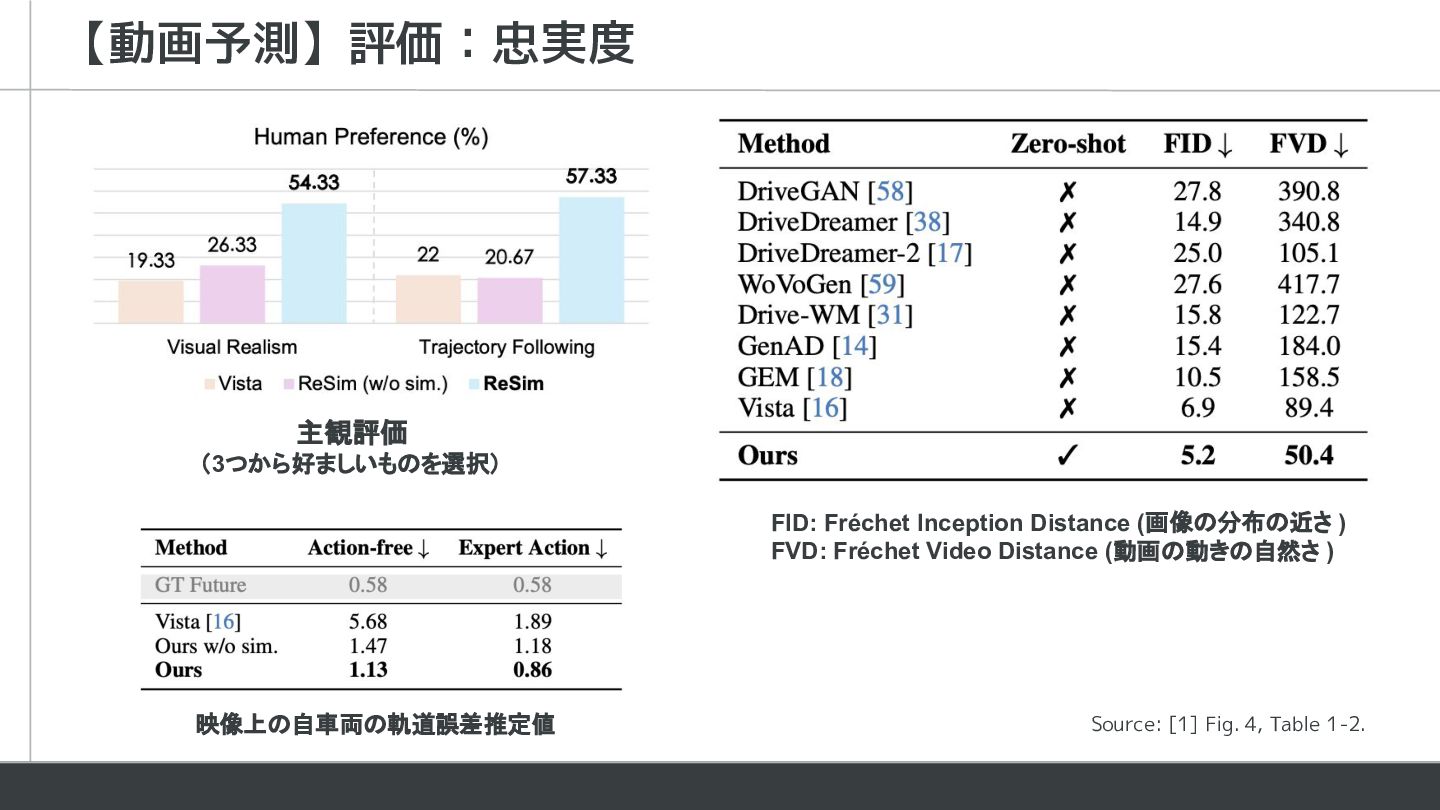
【動画予測】評価:忠実度 主観評価 (3つから好ましいものを選択) FID: Fréchet Inception Distance (画像の分布の近さ ) FVD:
Fréchet Video Distance (動画の動きの自然さ ) 映像上の自車両の軌道誤差推定値 Source: [1] Fig. 4, Table 1-2.
【動画予測】評価:制御性 入力 軌道計画毎の予測結果 Source: [1] Fig. 6
【動画予測】評価:失敗例 ▪ オクルージョンに対して、時系列的な一貫性を保つのが苦手(上段・中段) ▪ 極端なケースにおいてアーティファクトが発生(下段) Source: [1] Fig. S18
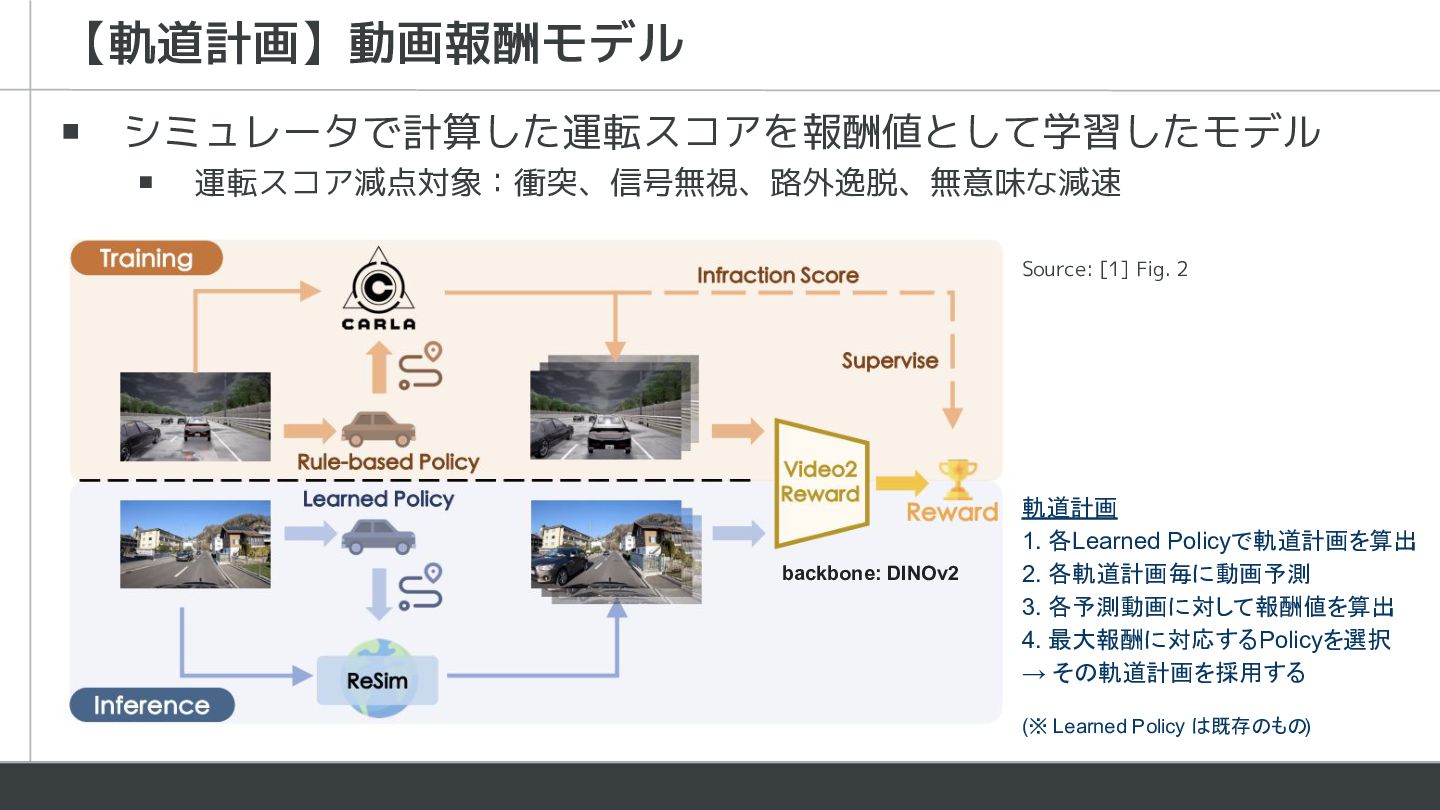
【軌道計画】動画報酬モデル backbone: DINOv2 ▪ シミュレータで計算した運転スコアを報酬値として学習したモデル ▪ 運転スコア減点対象:衝突、信号無視、路外逸脱、無意味な減速 軌道計画 1. 各Learned
Policyで軌道計画を算出 2. 各軌道計画毎に動画予測 3. 各予測動画に対して報酬値を算出 4. 最大報酬に対応するPolicyを選択 → その軌道計画を採用する (※ Learned Policy は既存のもの) Source: [1] Fig. 2
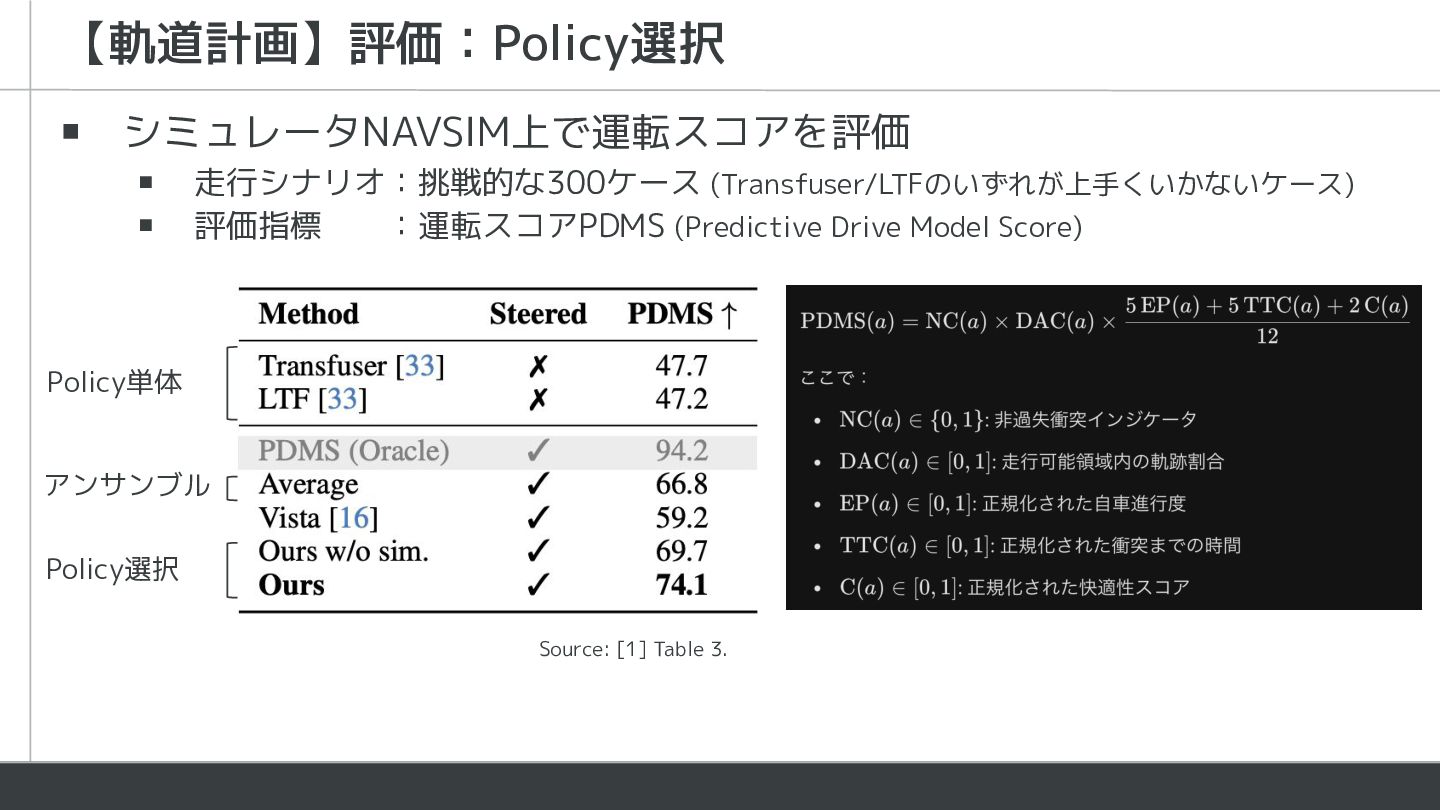
【軌道計画】評価:Policy選択 Policy単体 Policy選択 アンサンブル ▪ シミュレータNAVSIM上で運転スコアを評価 ▪ 走行シナリオ:挑戦的な300ケース (Transfuser/LTFのいずれが上手くいかないケース) ▪
評価指標 :運転スコアPDMS (Predictive Drive Model Score) Source: [1] Table 3.
【軌道計画】評価:既存E2Eアプローチとの比較 ▪ シミュレータNAVSIM上で運転スコアを評価 ▪ 走行シナリオ:NAVSIM navtest ▪ 評価指標 :運転スコアPDMS Source: [1]
Table 4.
▪ 少量の危険走行シミュレーションデータを学習データに加えることで 運転世界モデルの動画予測の性能を改善 ▪ 忠実度 ▪ 軌道計画に対する制御性 ▪ シミュレーションデータで学習した動画報酬モデルと動画予測を組み 合わせることで、良好な軌道計画を選択
▪ 拡散モデルの推論の計算負荷が高く、実用に課題あり まとめ
[1] J. Yang, et al., “ReSim: Reliable World Simulation for
Autonomous Driving” , NeurIPS, 2025. [2] S. Gao, et al., “Vista: A Generalizable Driving World Model with High Fidelity and Versatile Controllability”, NeurIPS, 2024. 参考文献
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![提案手法 ▪ 動画予測:少量のシミュレーションデータを加えて運転世界モデルを学習 ▪ 軌道計画:シミュレーションデータで学習したVideo2Reward 運転動画から 運転の良し悪しを 推定するモデル Source: [1]](https://files.speakerdeck.com/presentations/ca259f2f7ed44b57a2818f3cef1fdd83/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![【動画予測】評価:制御性 入力 軌道計画毎の予測結果 Source: [1] Fig. 6](https://files.speakerdeck.com/presentations/ca259f2f7ed44b57a2818f3cef1fdd83/slide_10.jpg){kind=link}
![【動画予測】評価:失敗例 ▪ オクルージョンに対して、時系列的な一貫性を保つのが苦手(上段・中段) ▪ 極端なケースにおいてアーティファクトが発生(下段) Source: [1] Fig. S18](https://files.speakerdeck.com/presentations/ca259f2f7ed44b57a2818f3cef1fdd83/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
![【軌道計画】評価:既存E2Eアプローチとの比較 ▪ シミュレータNAVSIM上で運転スコアを評価 ▪ 走行シナリオ:NAVSIM navtest ▪ 評価指標 :運転スコアPDMS Source: [1]](https://files.speakerdeck.com/presentations/ca259f2f7ed44b57a2818f3cef1fdd83/slide_14.jpg){kind=link}
{kind=link}
![[1] J. Yang, et al., “ReSim: Reliable World Simulation for](https://files.speakerdeck.com/presentations/ca259f2f7ed44b57a2818f3cef1fdd83/slide_16.jpg){kind=link}