Share
第30回ロボティクスシンポジア 発表スライド 【学生奨励賞 受賞】
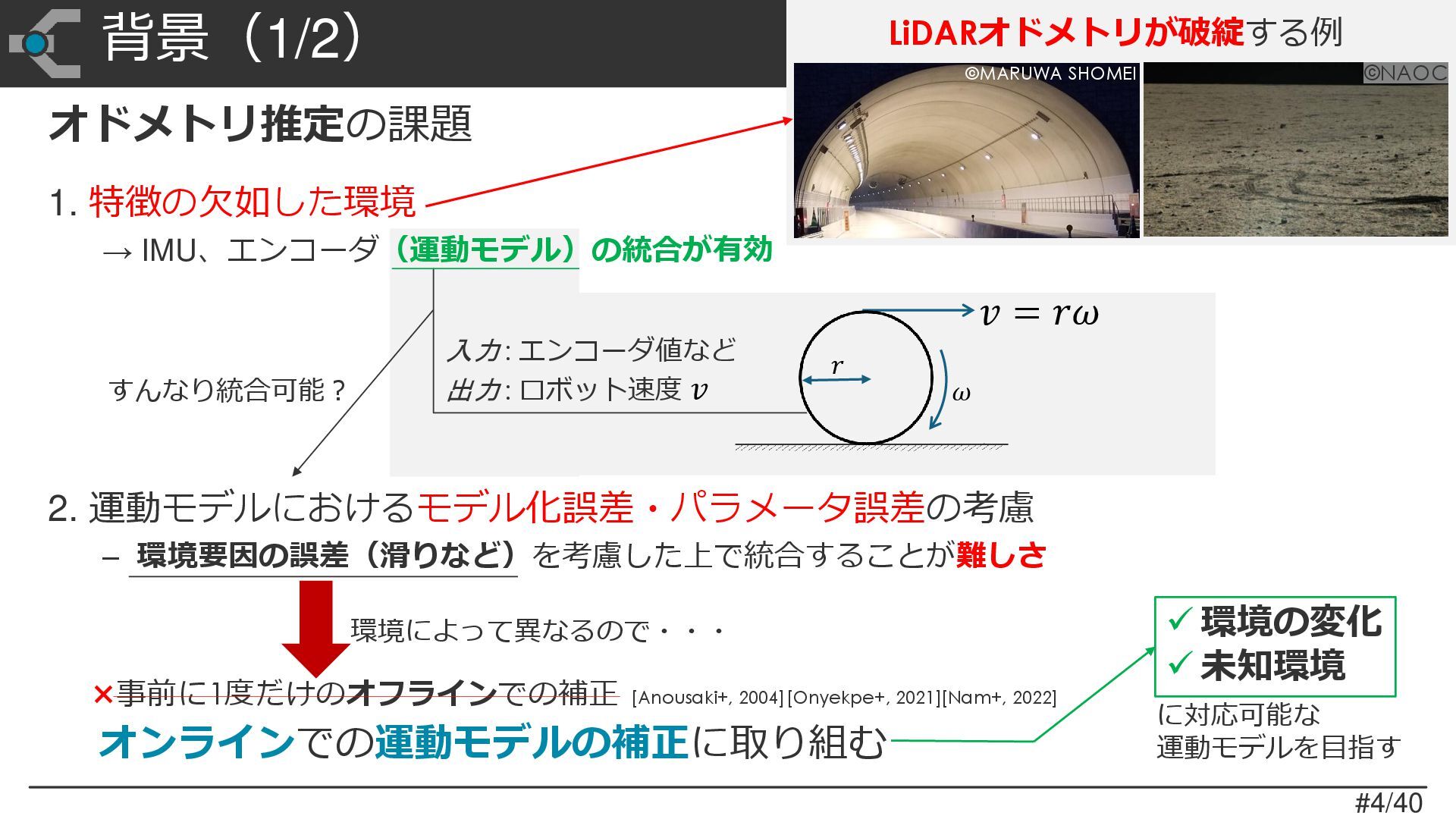
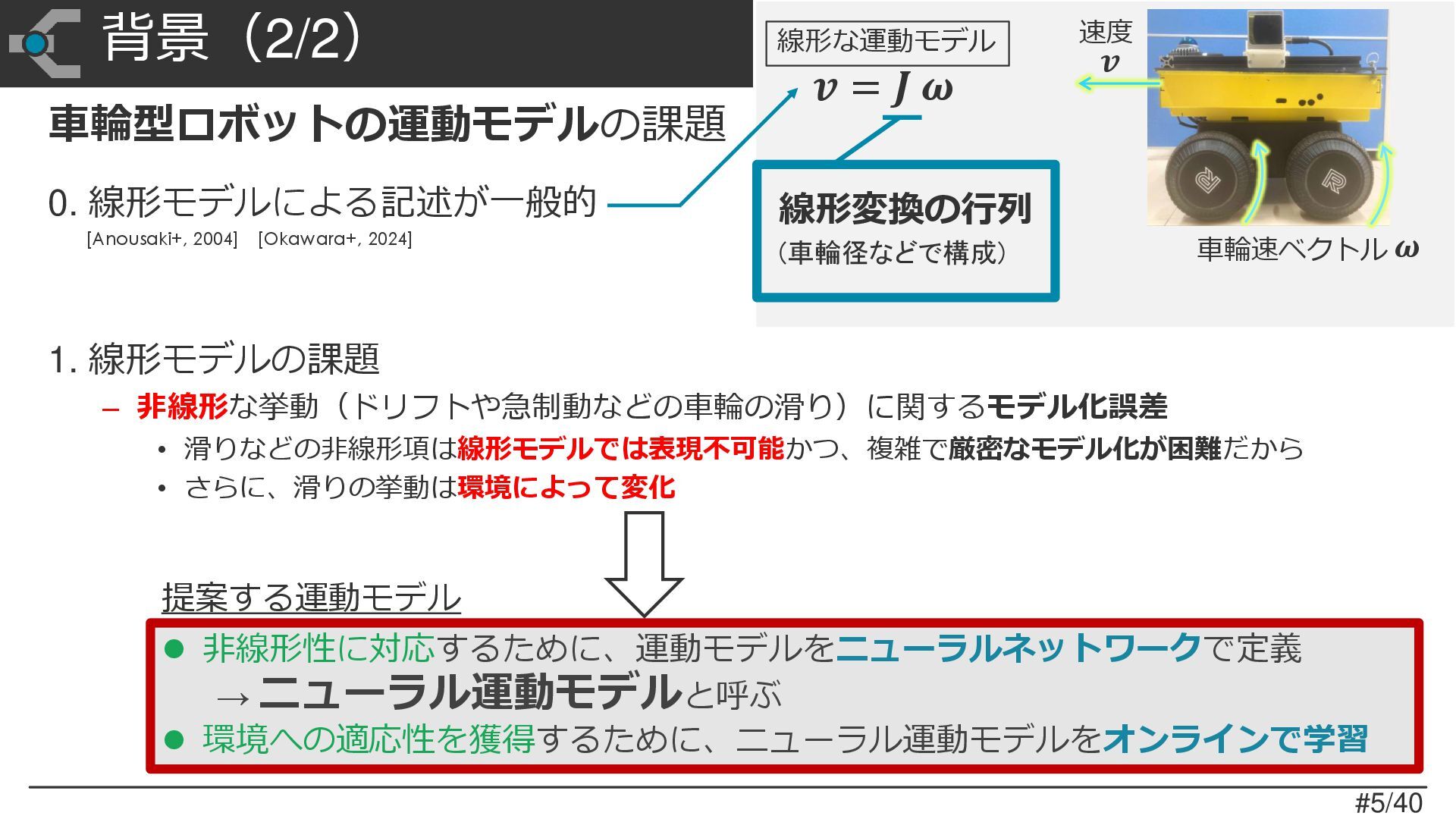
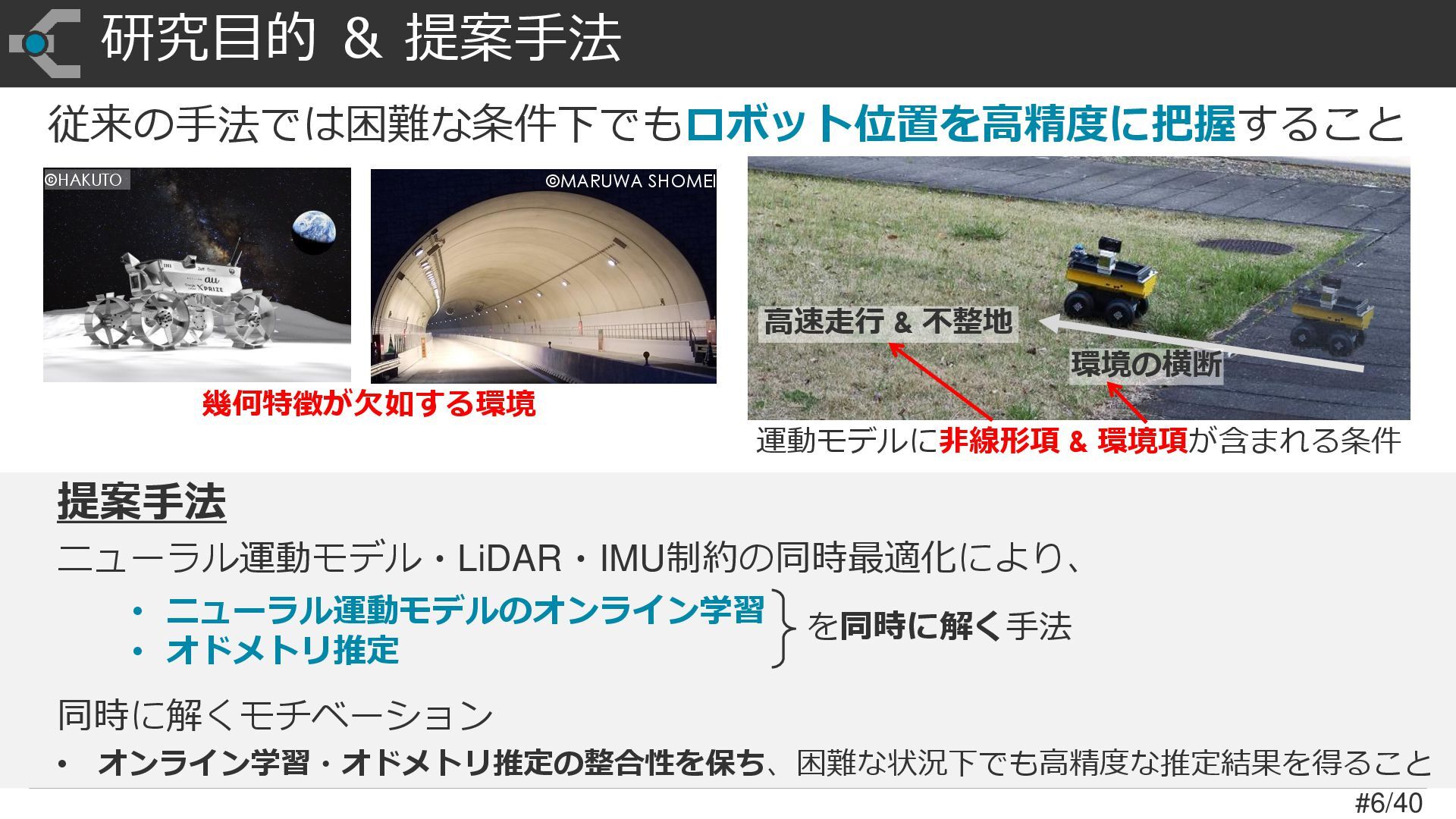
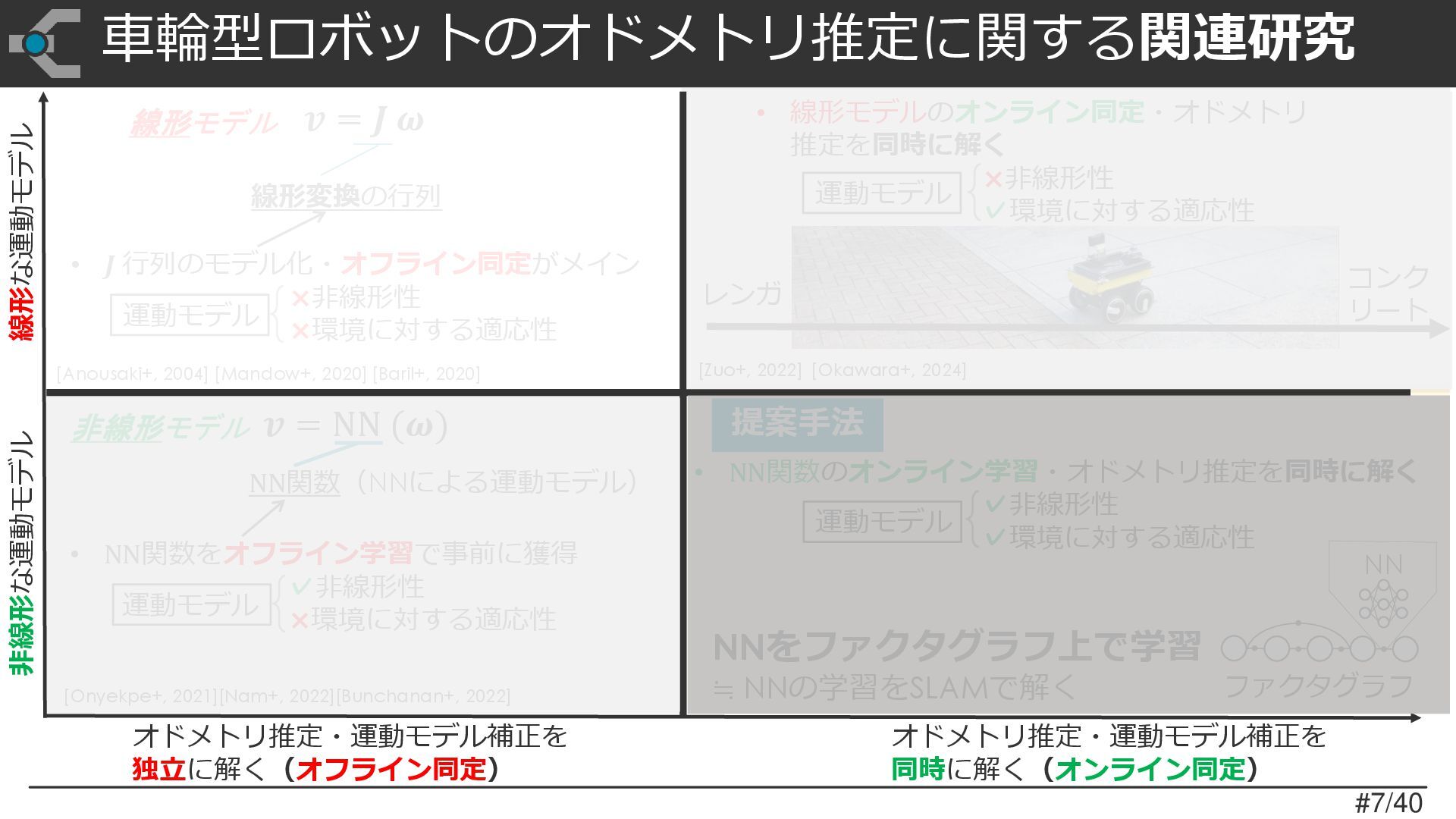
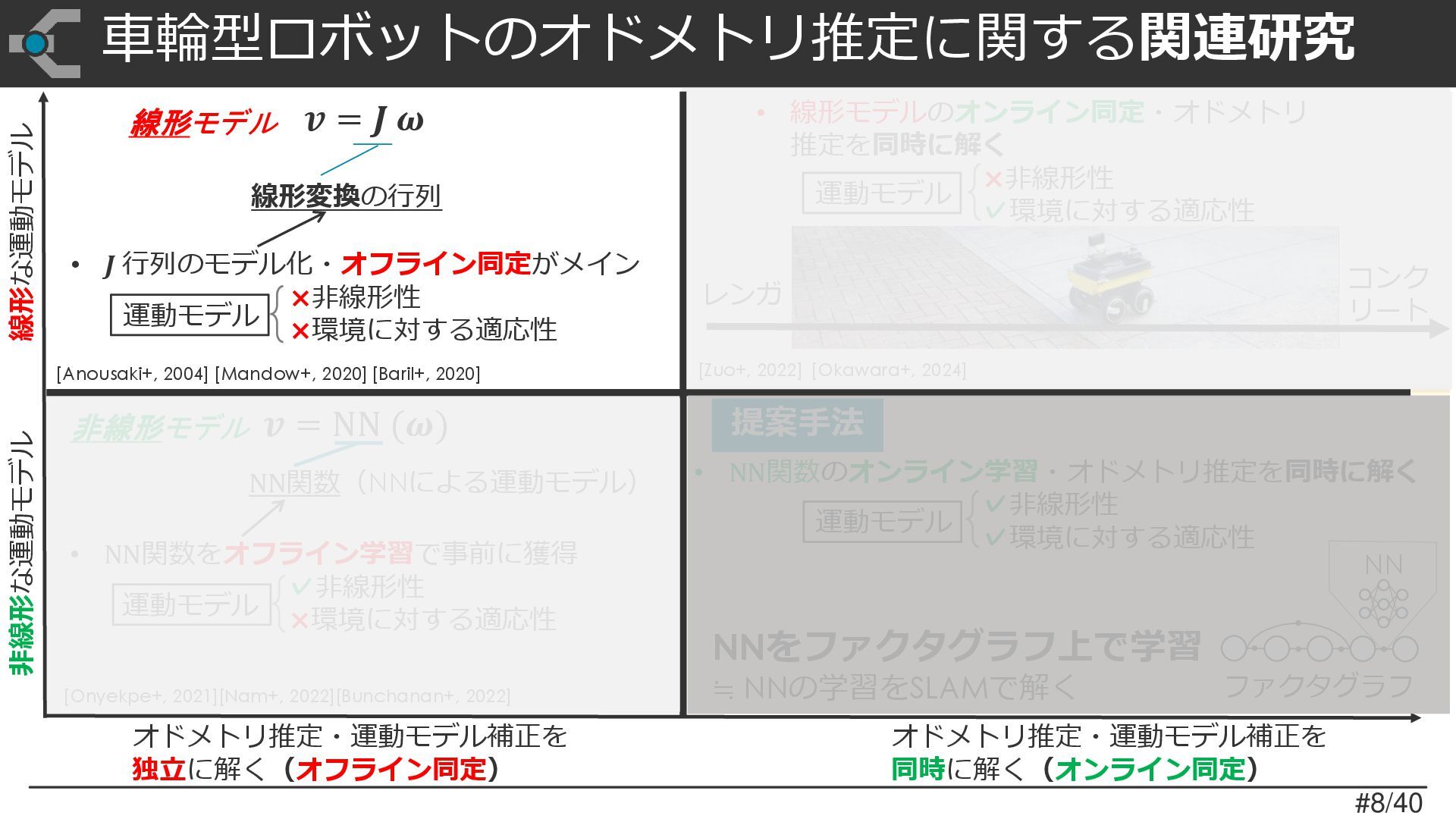
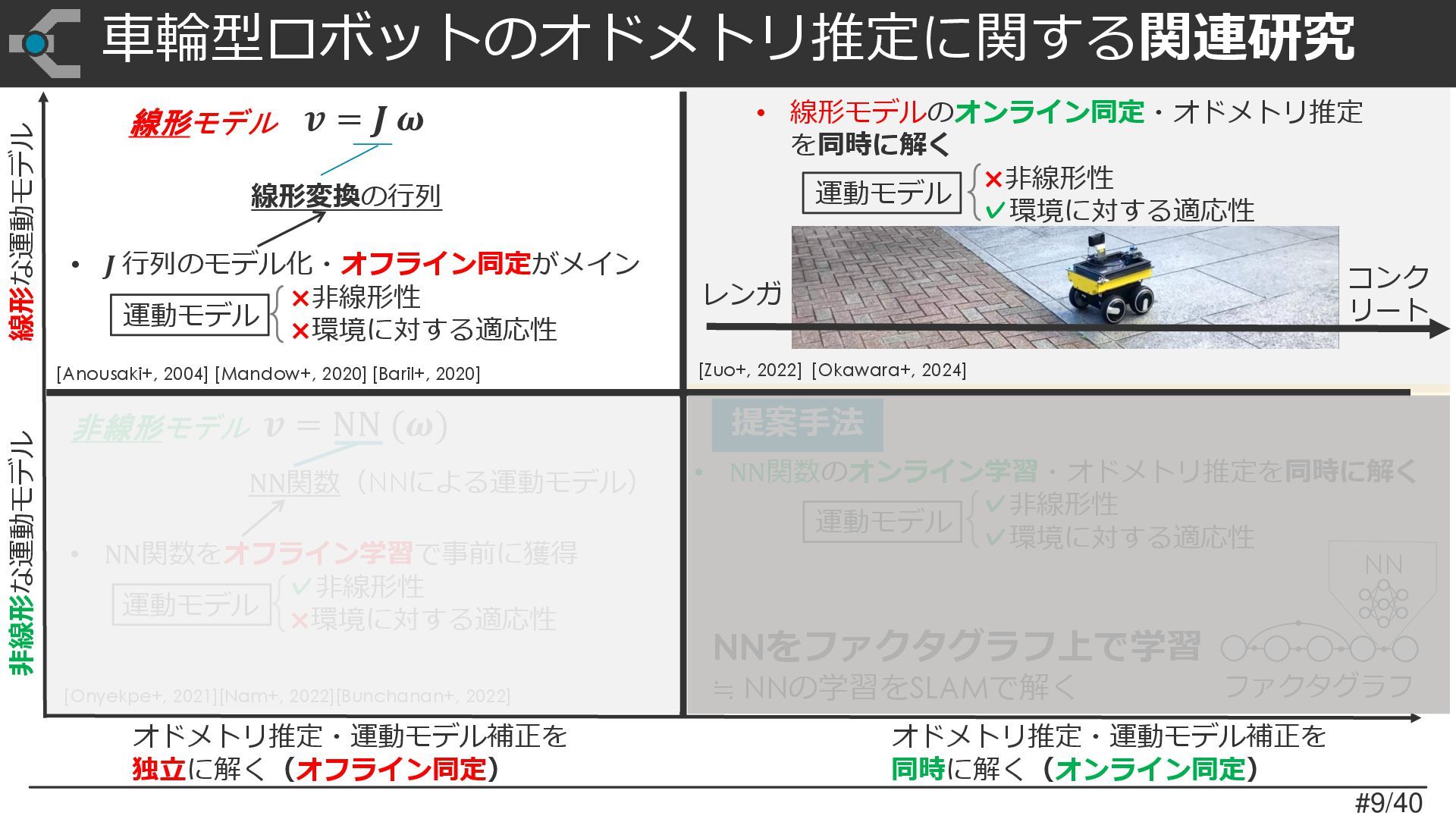
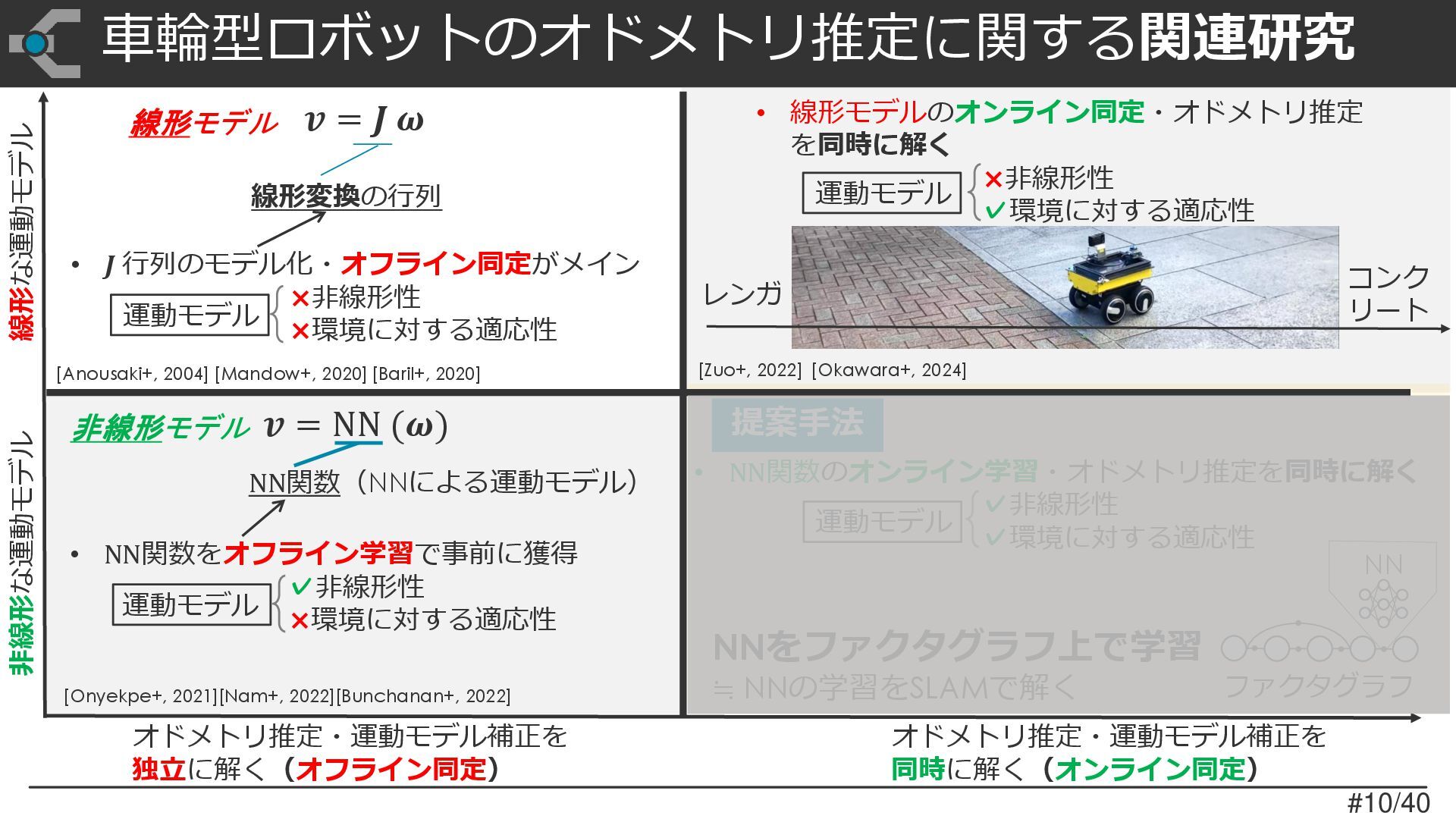
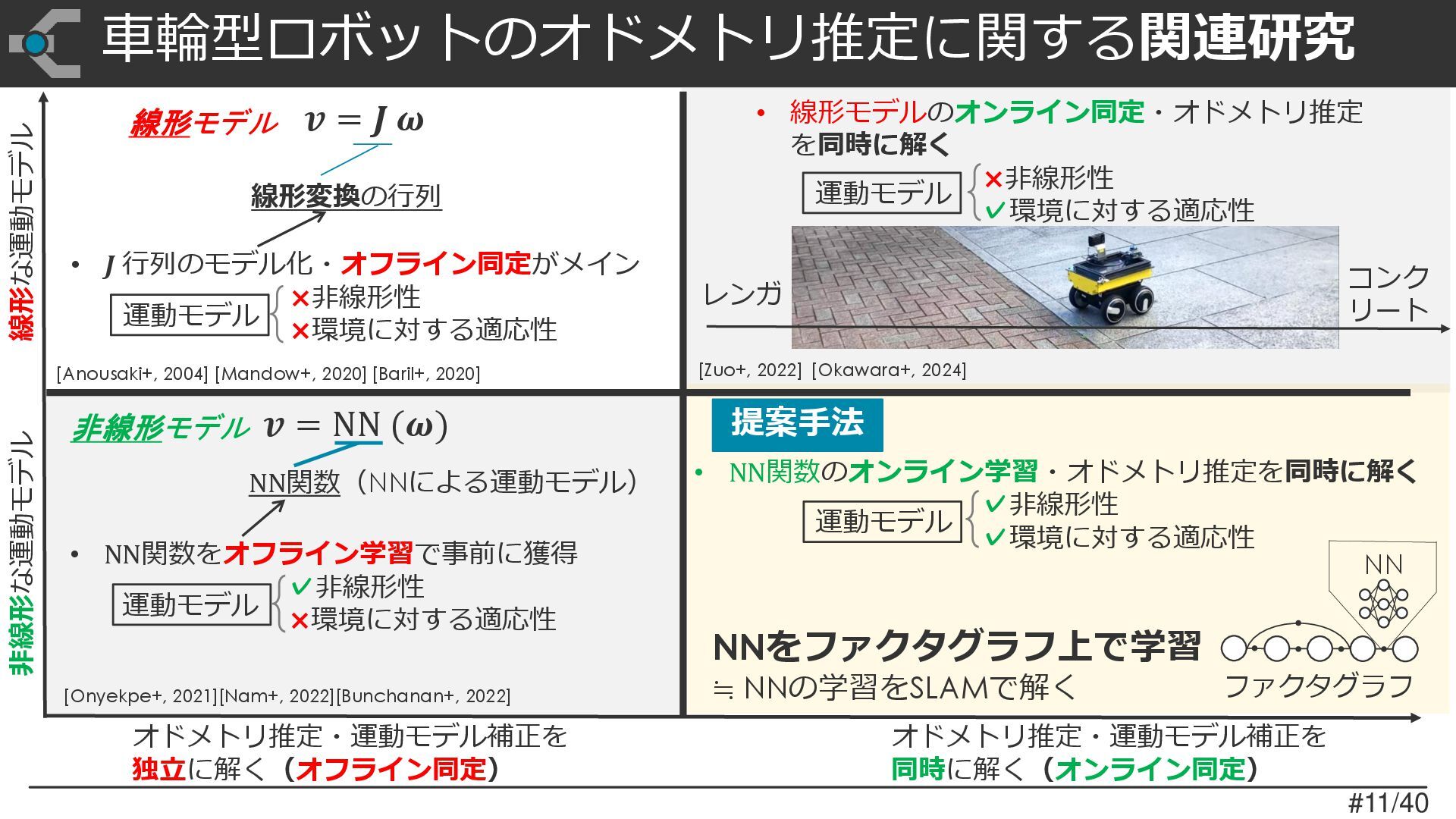
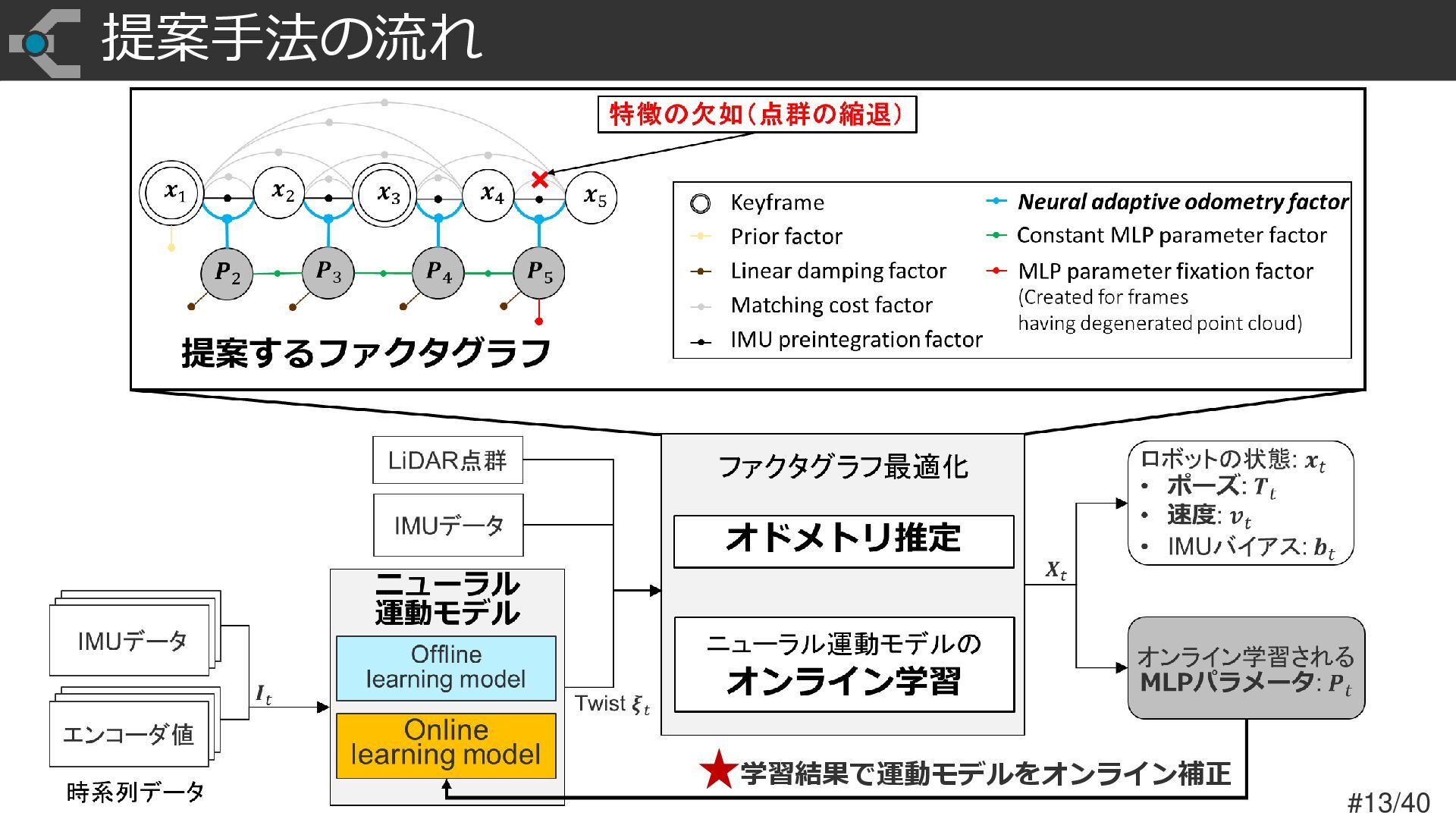
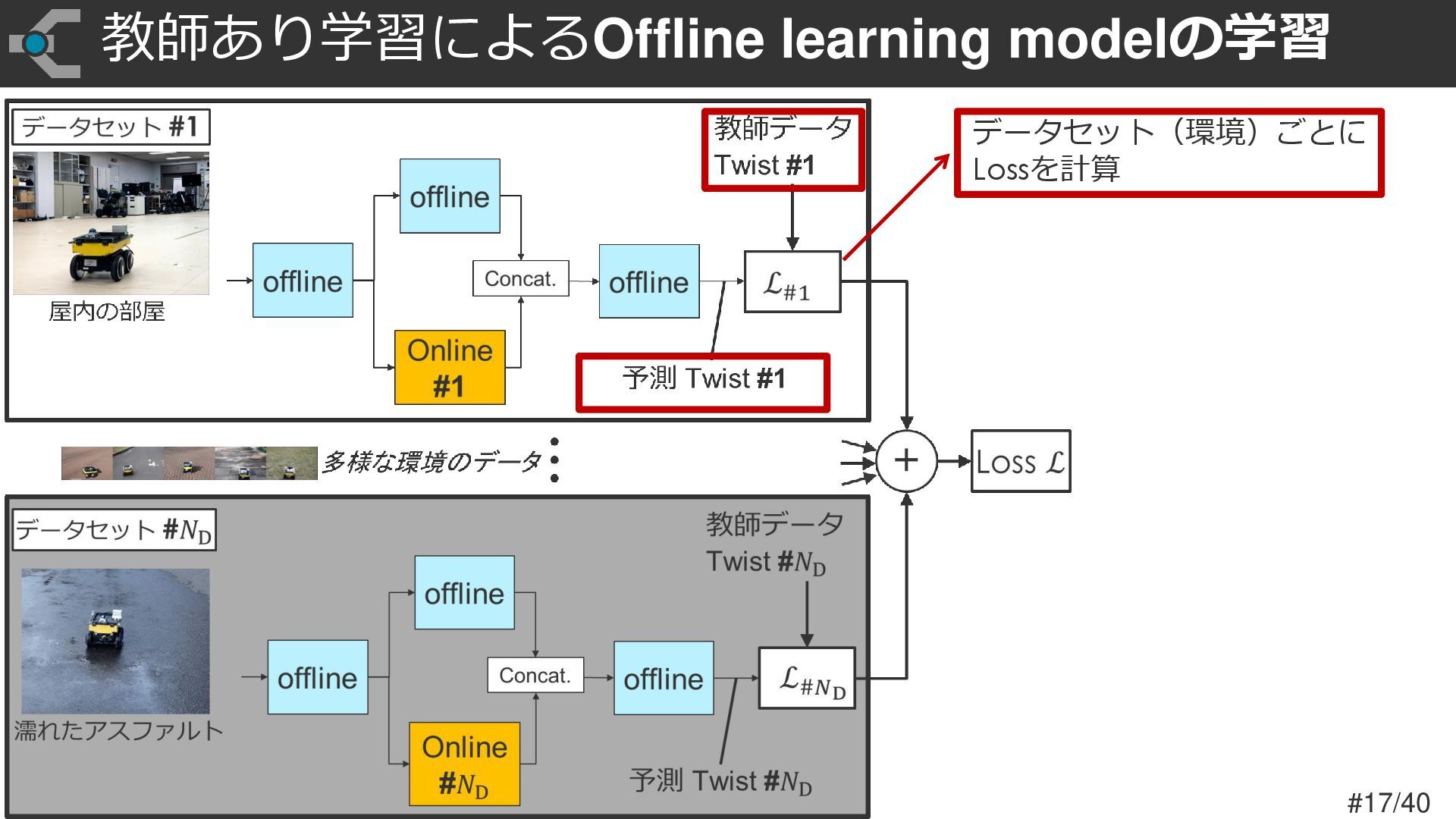
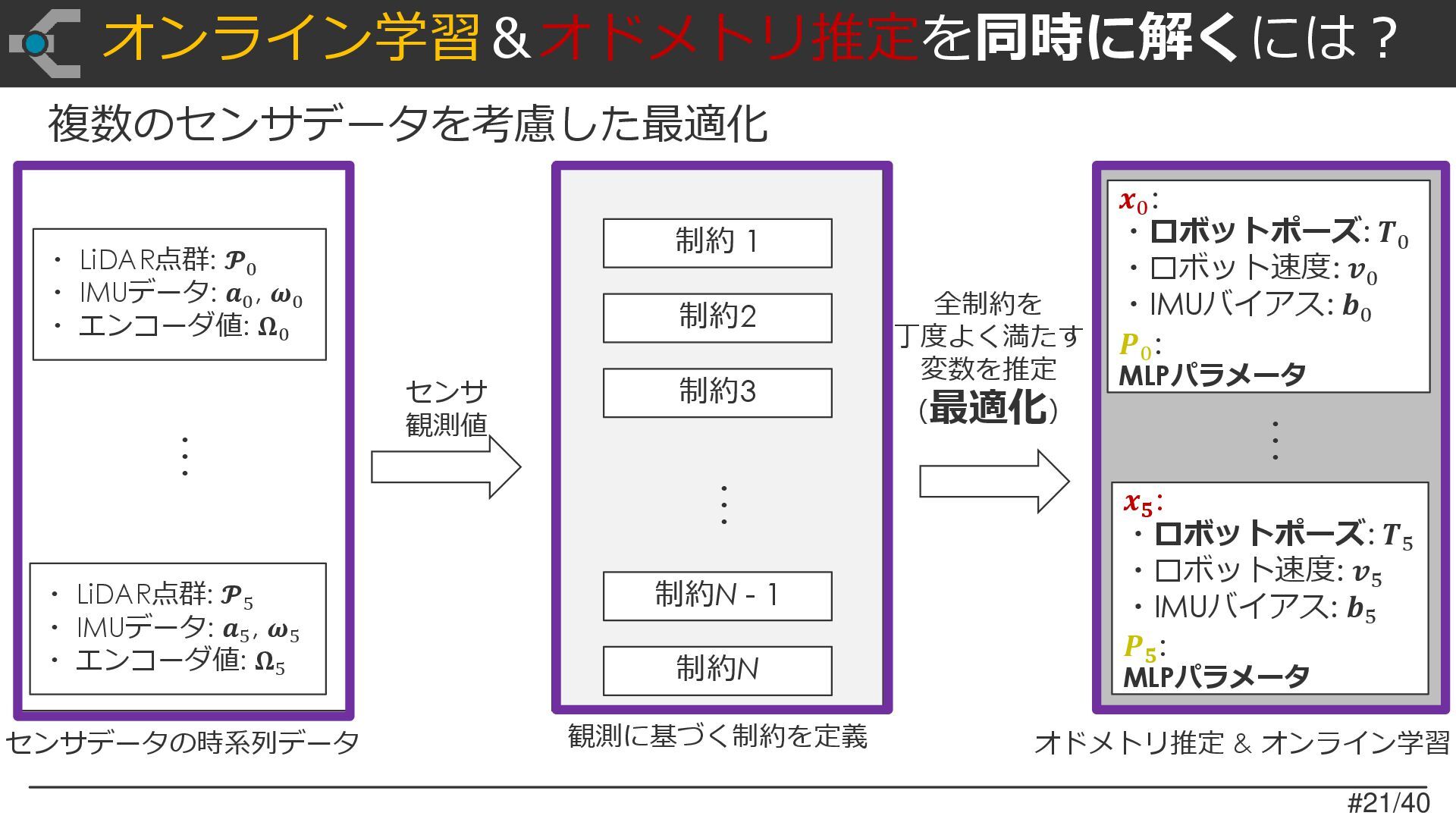
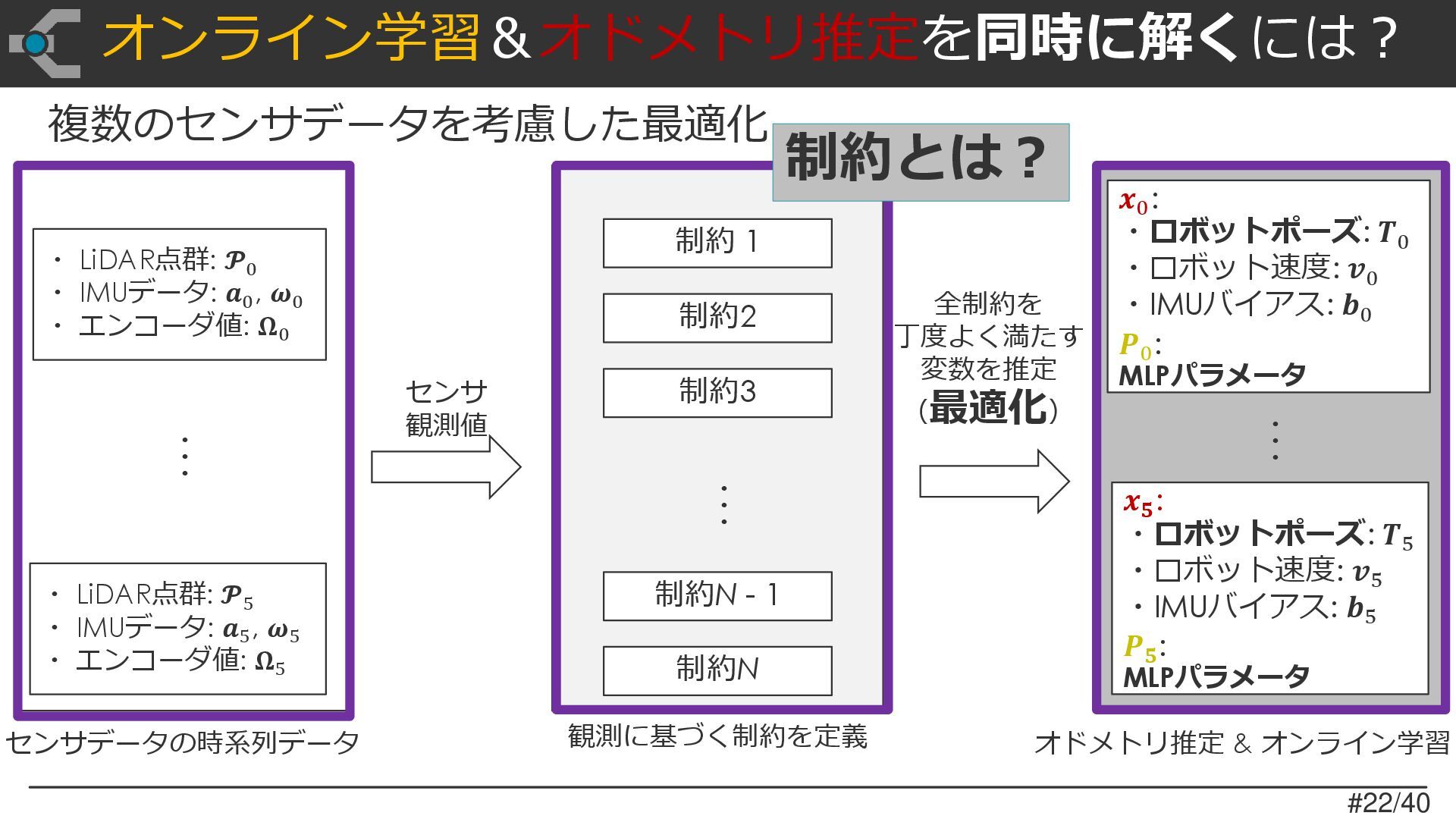
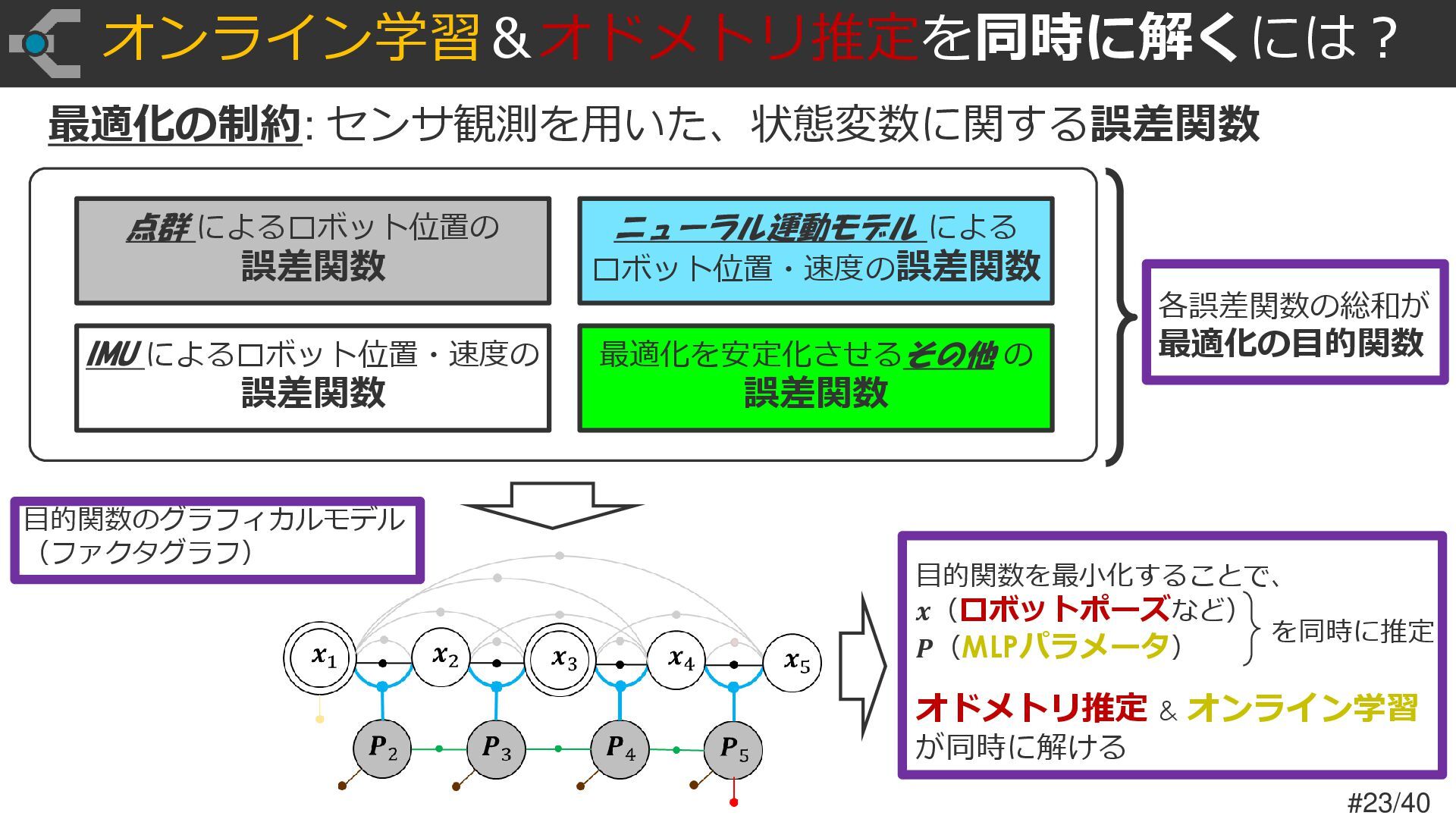
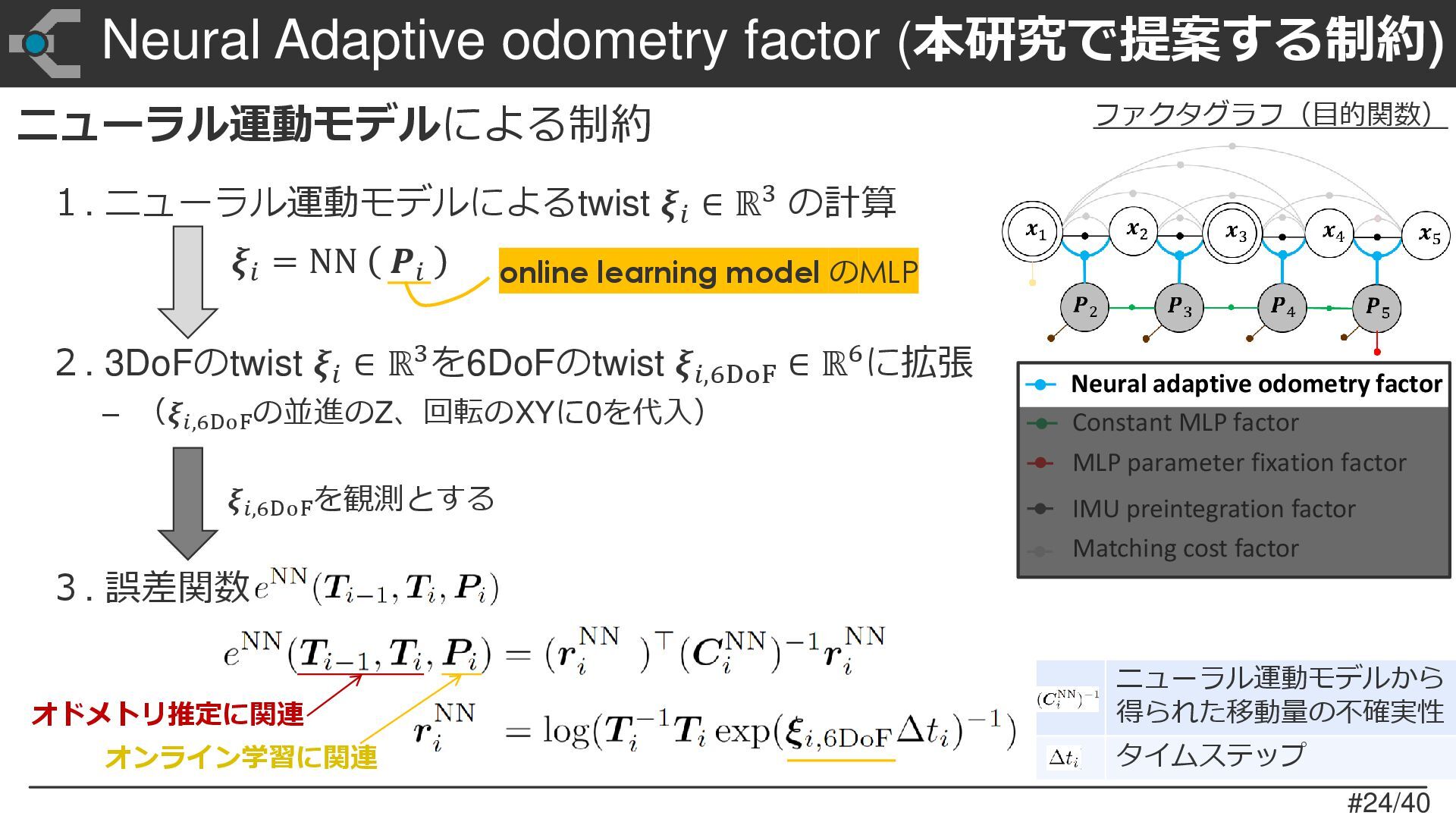
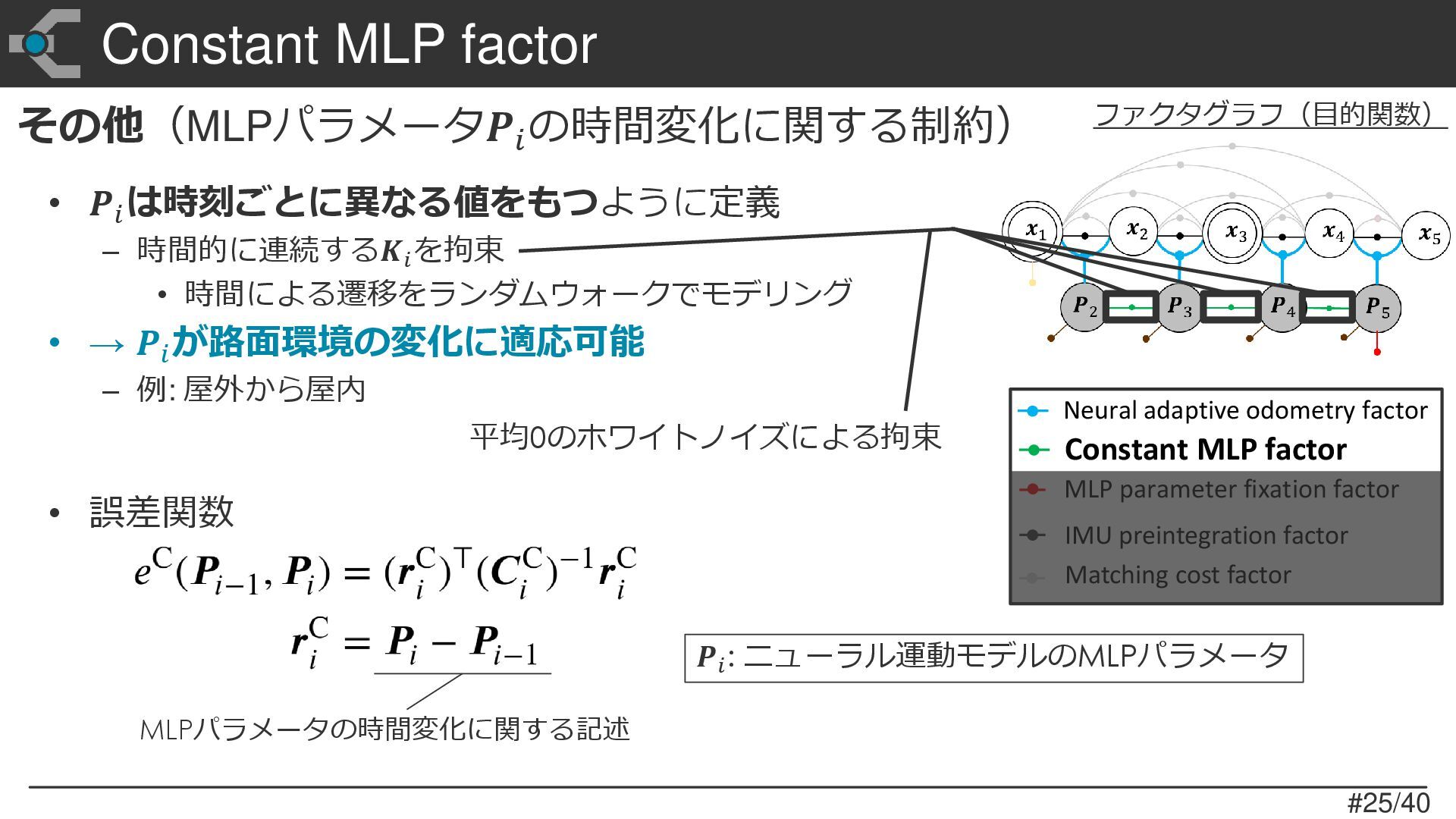
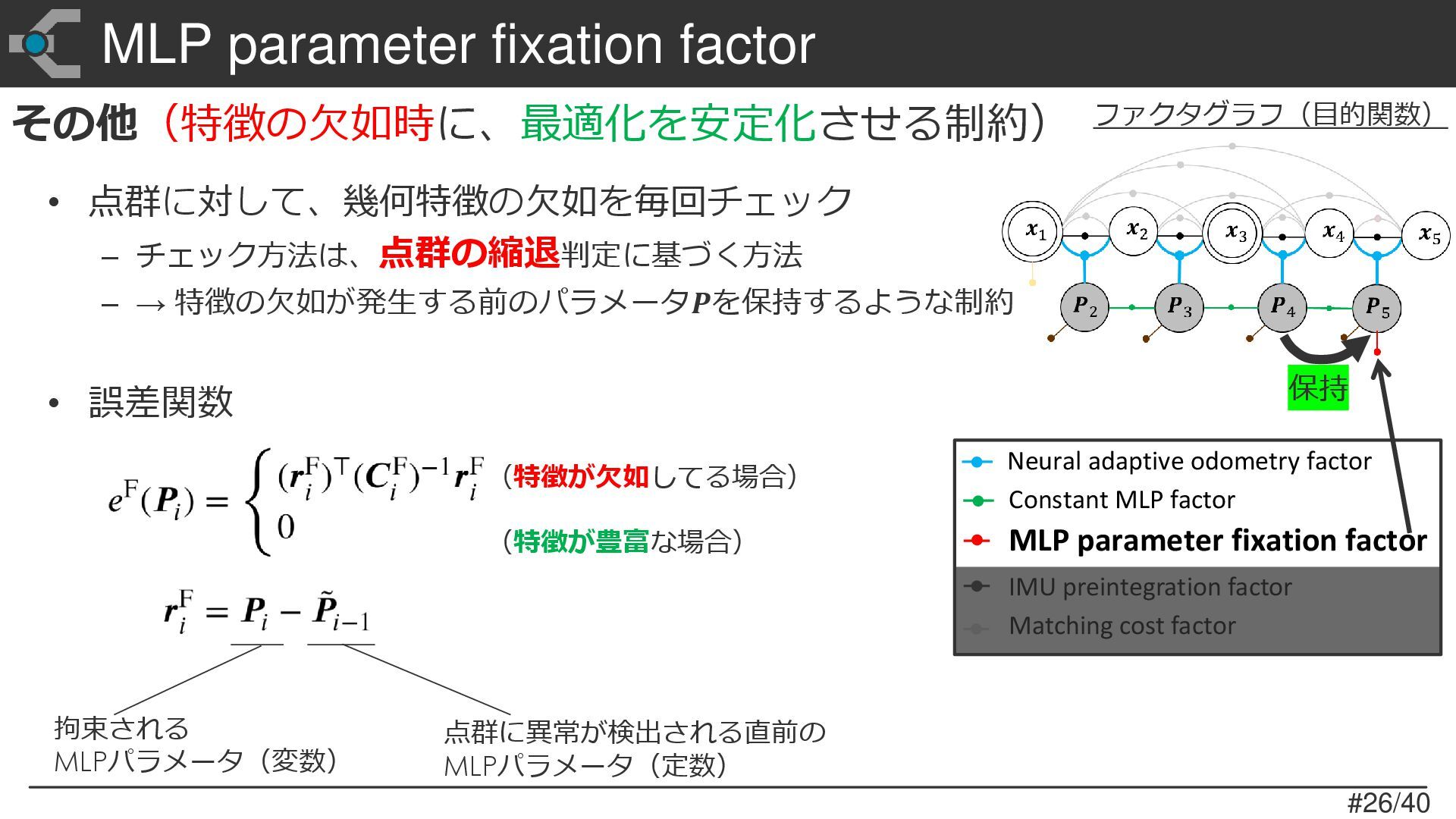
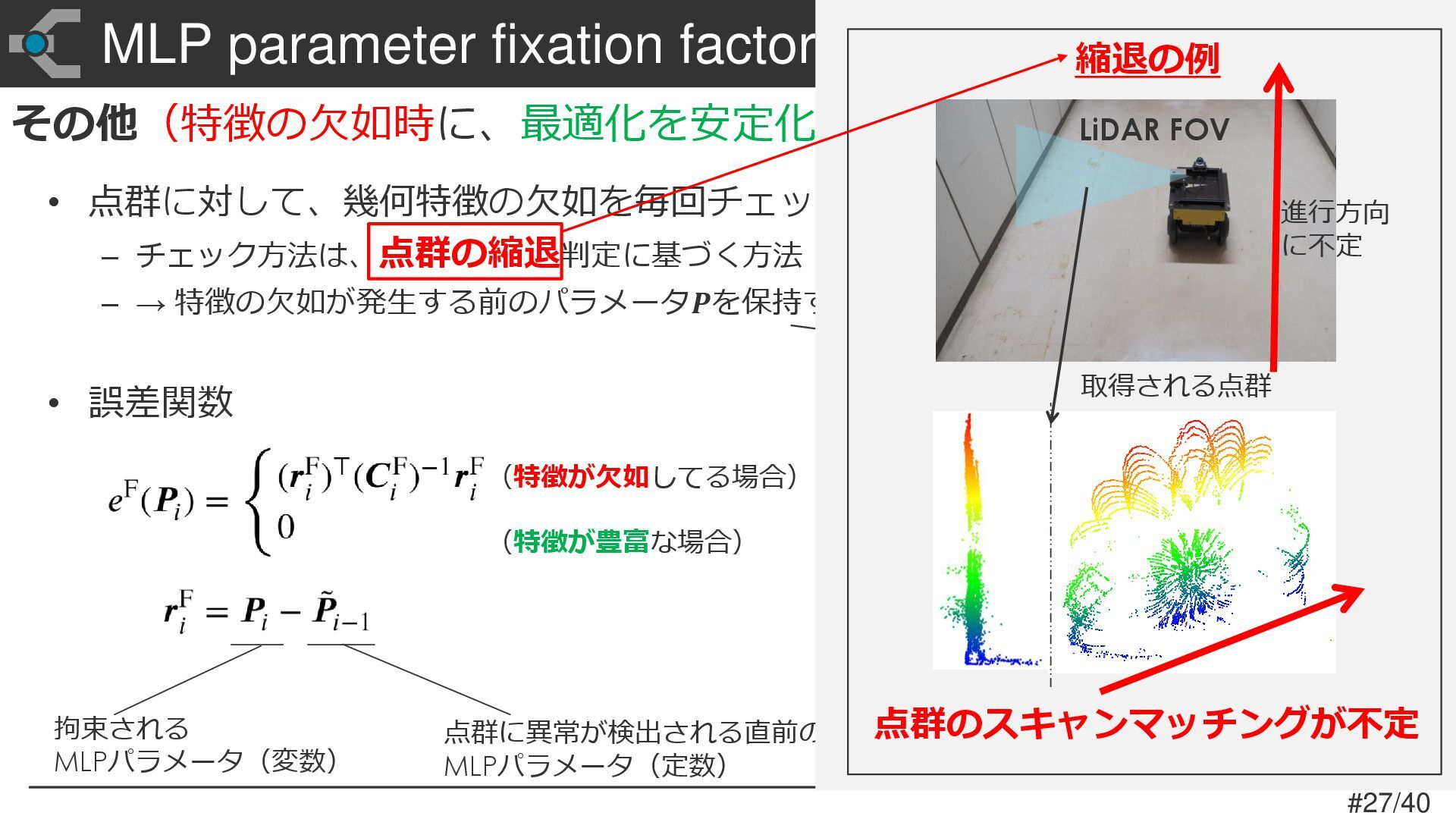
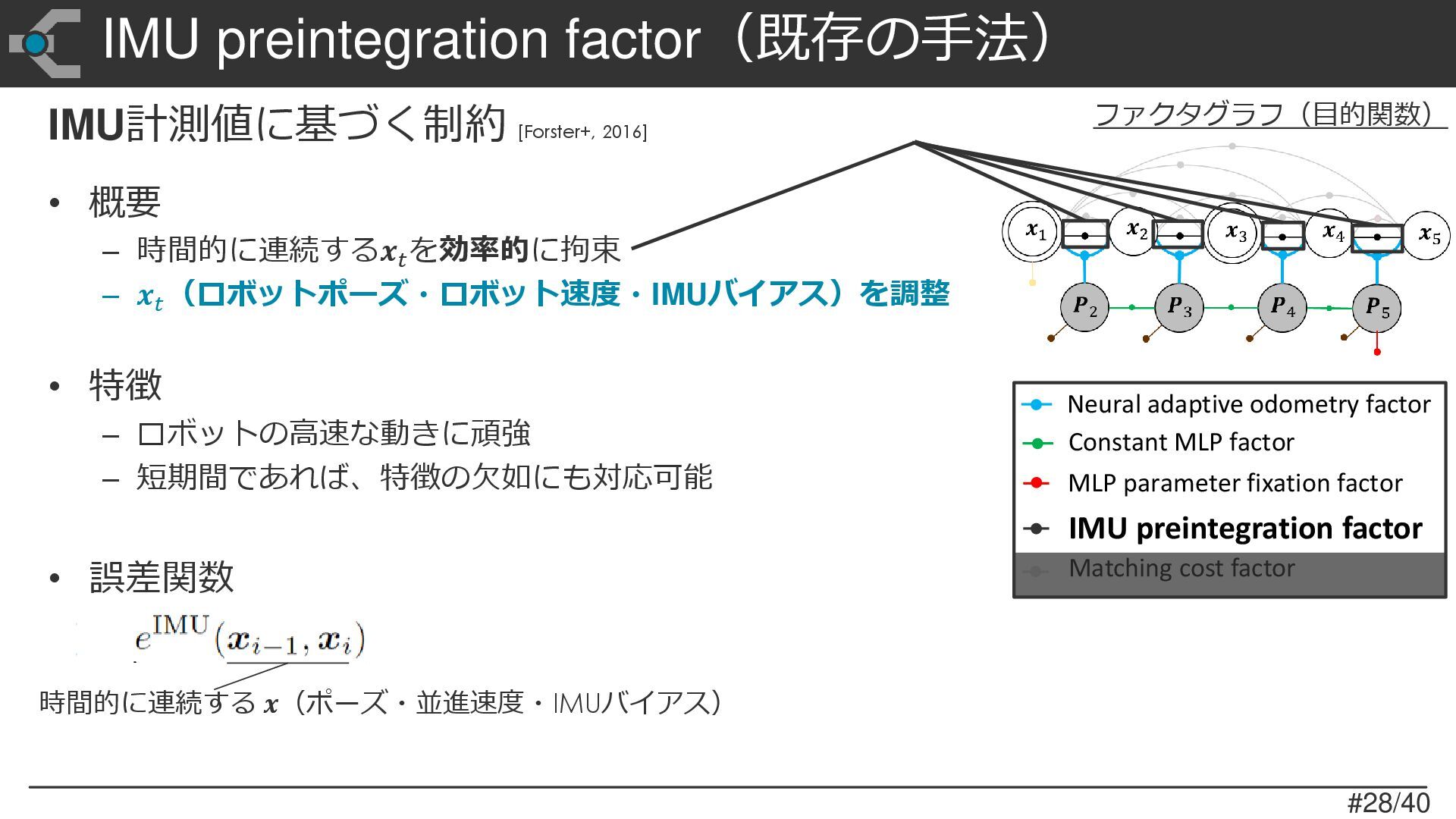
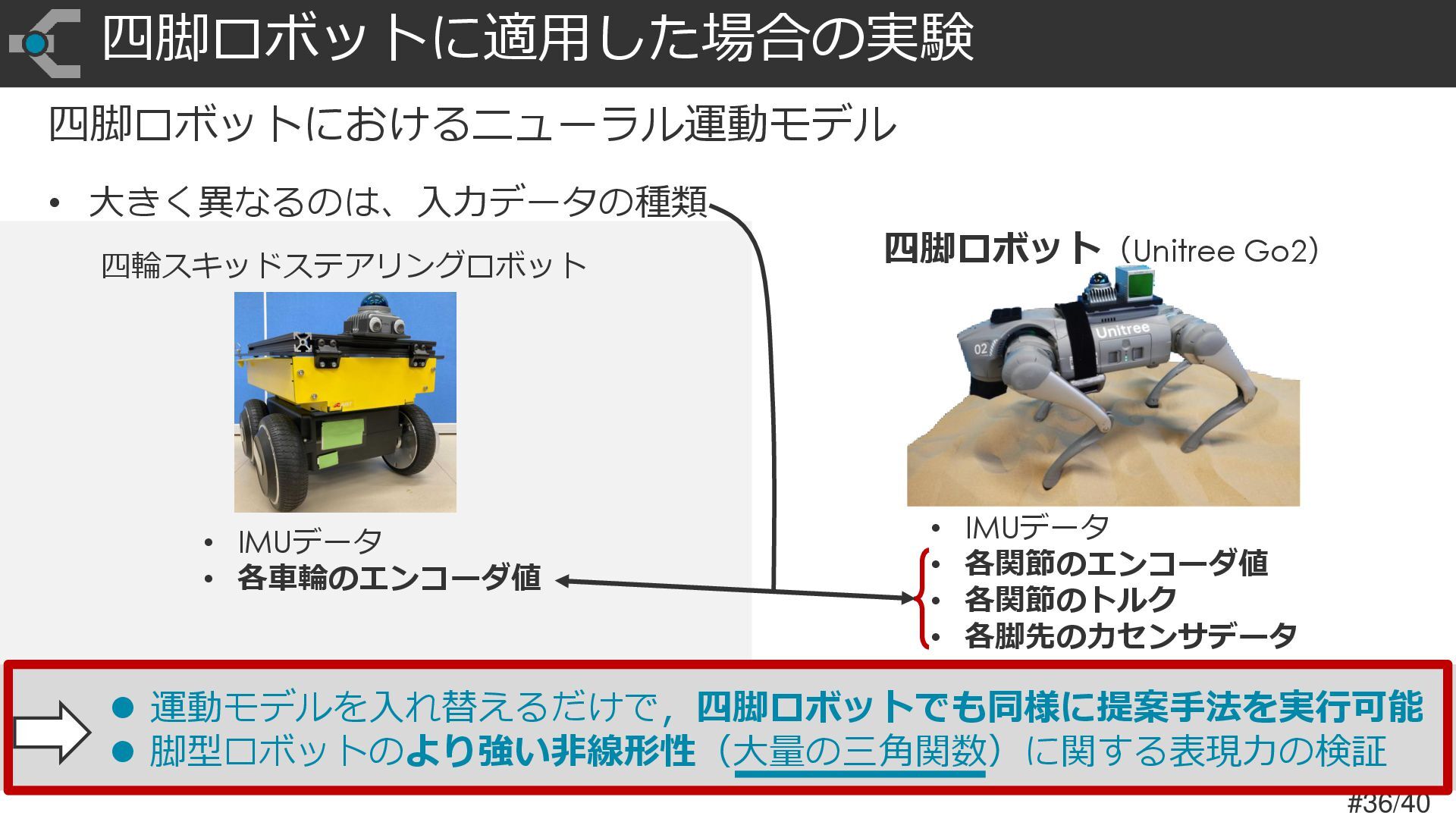
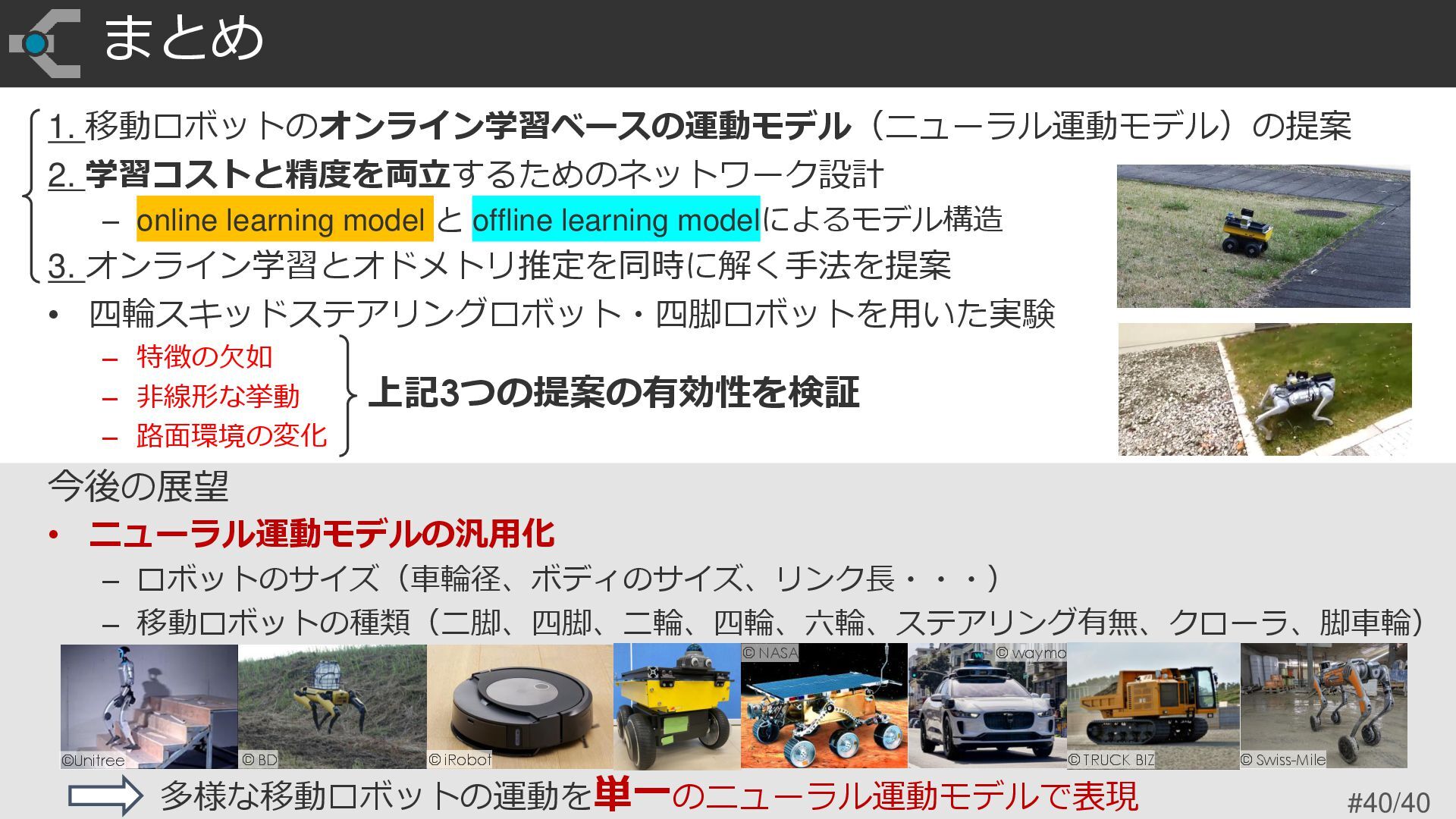
LiDAR・IMU・「オンライン学習ベースの, ホイール or レッグオドメトリ」融合で、特徴の欠如(トンネル、砂浜、月面など)・非線形なロボット挙動(ドリフトや急ブレーキ、大量の三角関数を含む脚の運動など)に頑強な位置推定の手法です。 ニューラルネットワーク(で記述された移動ロボットの運動モデル)をファクタグラフ上で学習するのが独自性となります。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
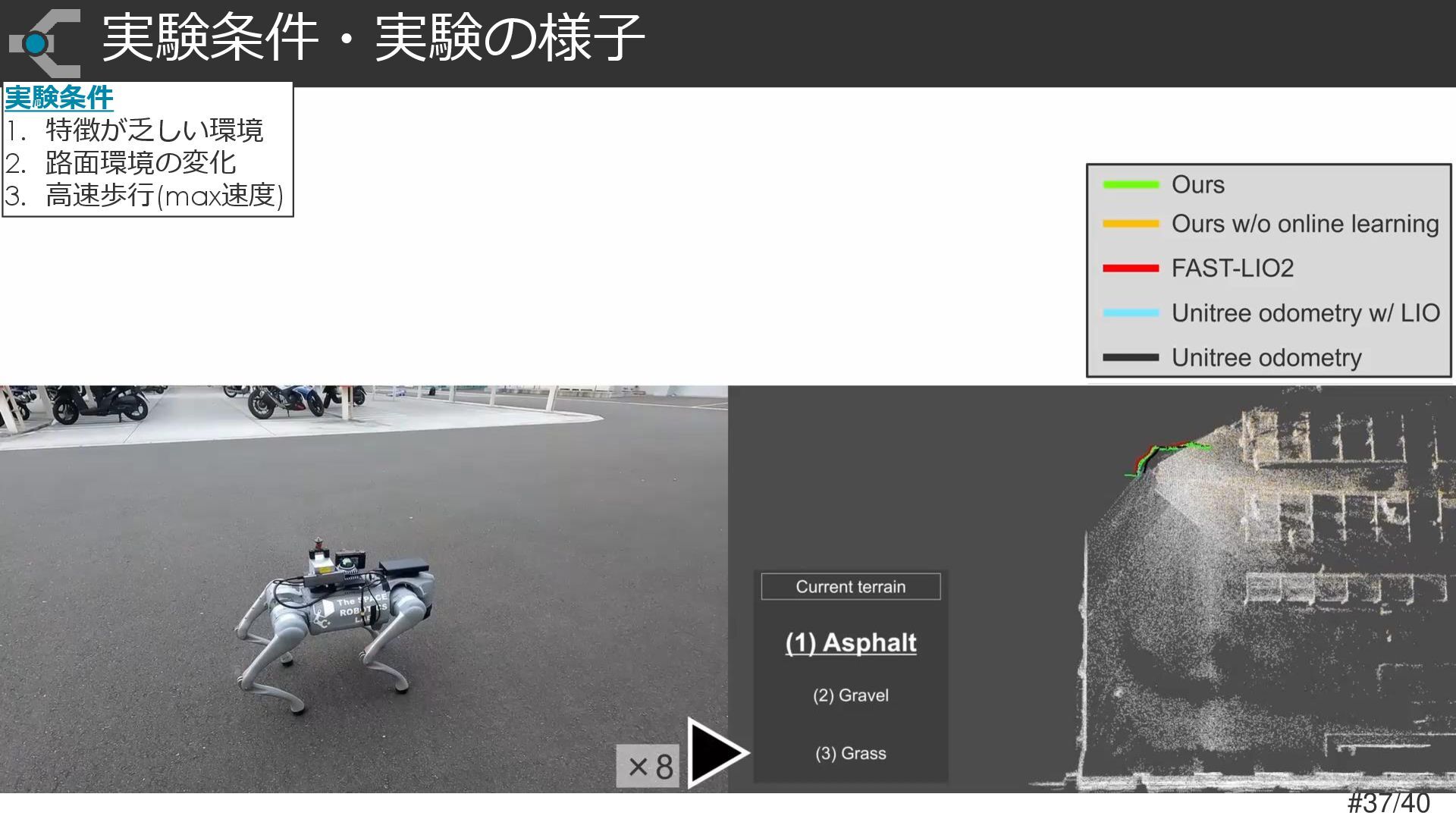
![#32/40 実験条件・実験の様子 (Click here to play this video) [Zhao+, 2023]](https://files.speakerdeck.com/presentations/d9354571a1df493786c716528d8e59c8/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![#38/40 定量評価 Method ATE [m] Ours 0.29 Ours w/o online](https://files.speakerdeck.com/presentations/d9354571a1df493786c716528d8e59c8/slide_37.jpg){kind=link}
{kind=link}
{kind=link}