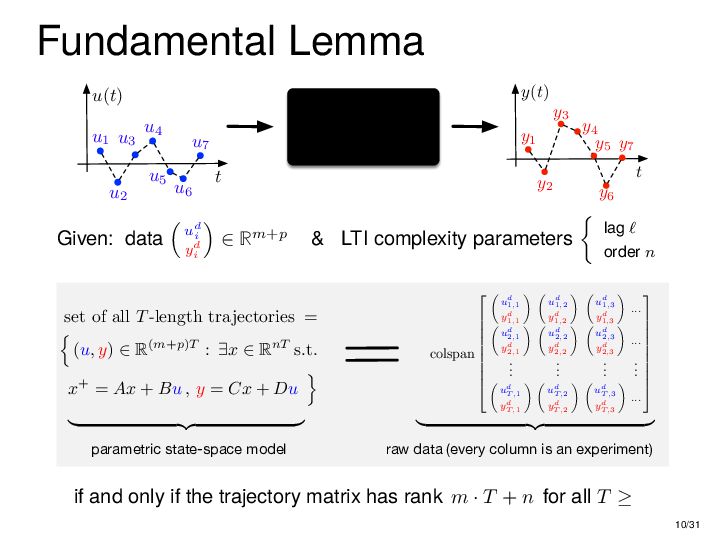
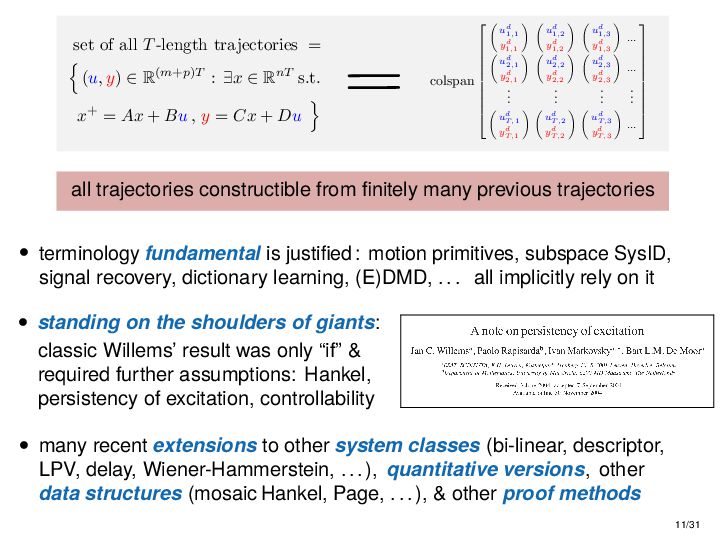
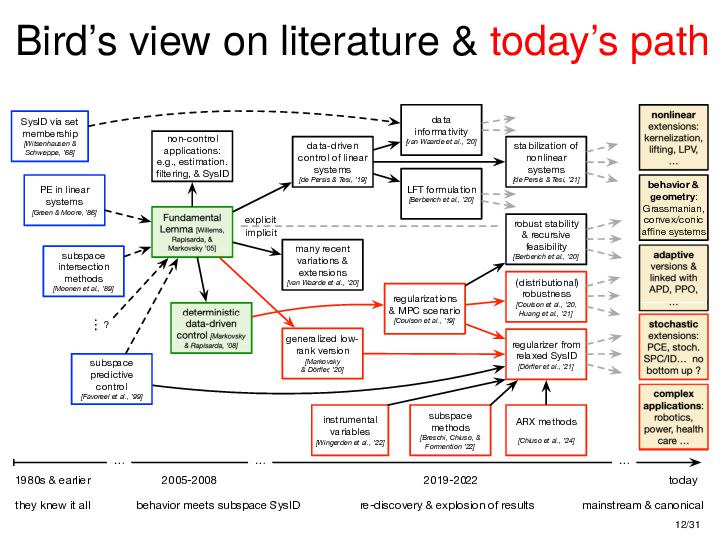
: ∃x ∈ RnT s.t. x+ = Ax + Bu , y = Cx + Du parametric state-space model non-parametric model from raw data colspan ud 1,1 yd 1,1 ud 1,2 yd 1,2 ud 1,3 yd 1,3 ... ud 2,1 yd 2,1 ud 2,2 yd 2,2 ud 2,3 yd 2,3 ... . . . . . . . . . . . . ud T,1 yd T,1 ud T,2 yd T,2 ud T,3 yd T,3 ... all trajectories constructible from finitely many previous trajectories • terminology fundamental is justified : motion primitives, subspace SysID, signal recovery, dictionary learning, (E)DMD, ... all implicitly rely on it • standing on the shoulders of giants: classic Willems’ result was only “if” & required further assumptions: Hankel, persistency of excitation, controllability • many recent extensions to other system classes (bi-linear, descriptor, LPV, delay, Wiener-Hammerstein, ...), quantitative versions, other data structures (mosaic Hankel, Page, ...), & other proof methods 11/31
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
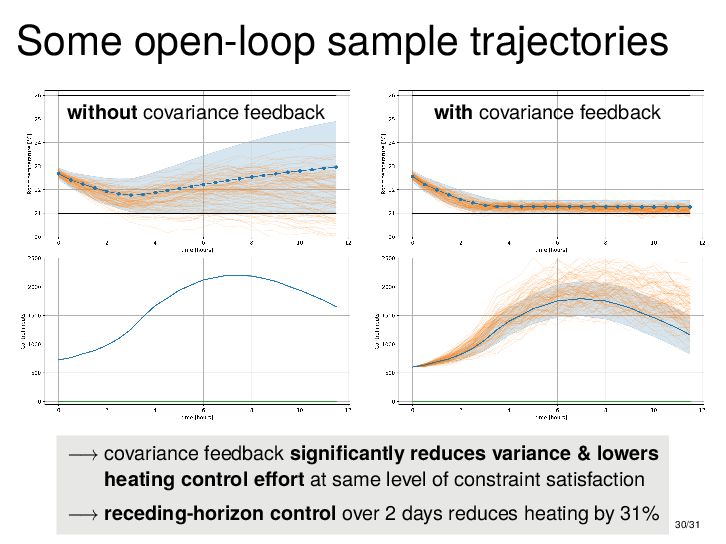
![Building control benchmark [Gwerder & T¨ odtli, Siemens, ’05] •](https://files.speakerdeck.com/presentations/506c904a72f549ce92ae7583e8753f46/slide_36.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}