Rui Fukushima1, Kei Ota2,3, Asako Kanezaki2, Yoko Sasaki1, Yusuke Yoshiyasu1 (1National Institute of Advanced Industrial Science and Technology, 2Tokyo Institute of Technology, 3Information Technology R&D Center, Mitsubishi Electric Corporation) ICRA 2022 慶應義塾大学 杉浦孔明研究室 是方諒介 Fukushima, R., Ota, K., Kanezaki, A., Sasaki, Y., Yoshiyasu, Y. “Object Memory Transformer for Object Goal Navigation.” ICRA 2022.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
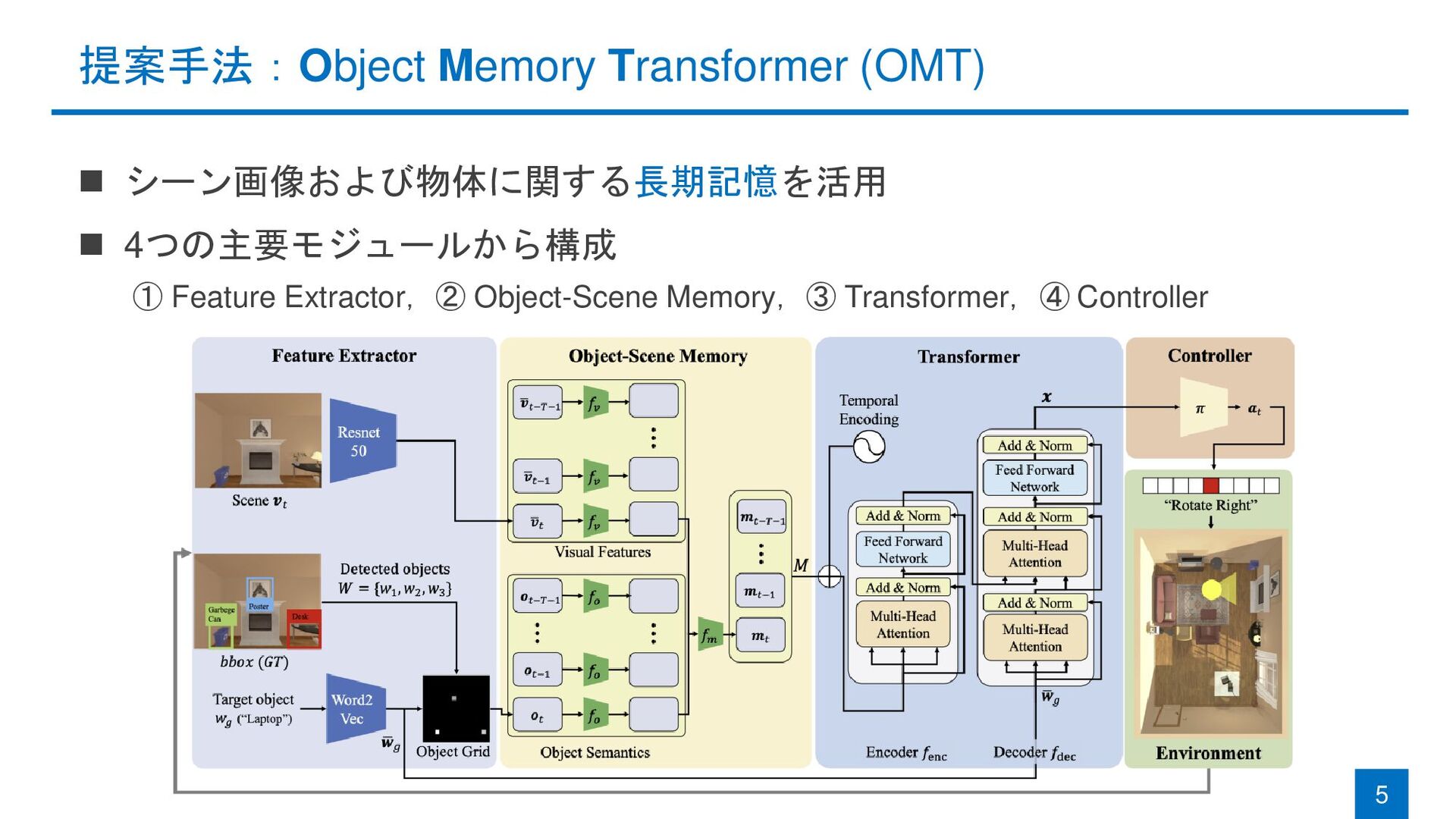
![① Feature Extractor:シーンの画像特徴/Object Gridを取得 ◼ 検出物体同士の関係をObject Grid で表現 [Druon+, RA-L20]](https://files.speakerdeck.com/presentations/0c95cdd4ea9d48f89e87dbcd6be3cc34/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
![④ Controller:9種類の行動 から1つ選択 ◼ Asynchronous Advantage Actor-Critic (A3C) [Mnih+, ICML16]](https://files.speakerdeck.com/presentations/0c95cdd4ea9d48f89e87dbcd6be3cc34/slide_8.jpg){kind=link}
![実験設定:AI2-THOR [Kolve+, 17] ◼ photo-realisticなシミュレータ ◼ 評価指標 ① Success Rate](https://files.speakerdeck.com/presentations/0c95cdd4ea9d48f89e87dbcd6be3cc34/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}