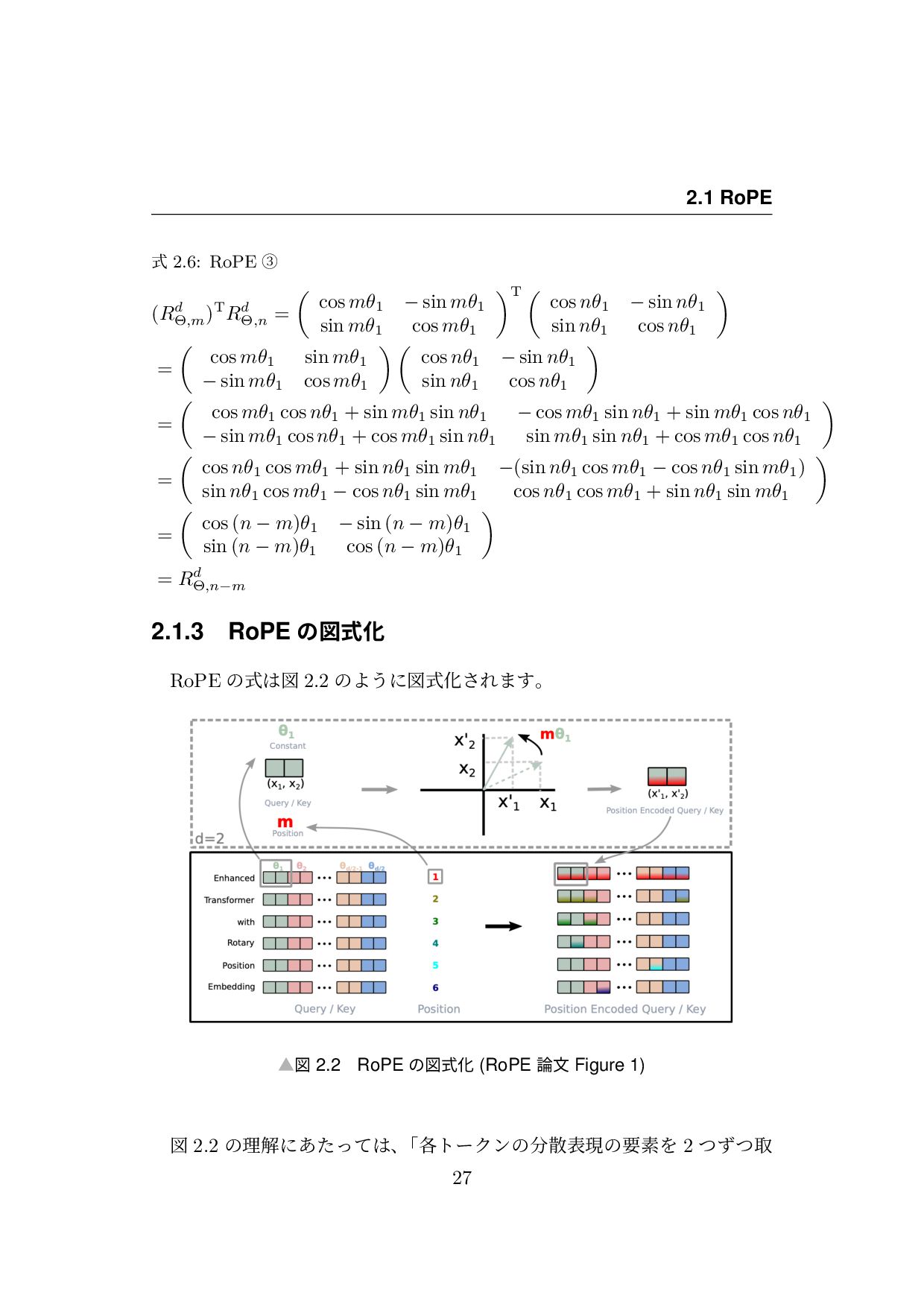
Θ,n = cos mθ1 − sin mθ1 sin mθ1 cos mθ1 T cos nθ1 − sin nθ1 sin nθ1 cos nθ1 = cos mθ1 sin mθ1 − sin mθ1 cos mθ1 cos nθ1 − sin nθ1 sin nθ1 cos nθ1 = cos mθ1 cos nθ1 + sin mθ1 sin nθ1 − cos mθ1 sin nθ1 + sin mθ1 cos nθ1 − sin mθ1 cos nθ1 + cos mθ1 sin nθ1 sin mθ1 sin nθ1 + cos mθ1 cos nθ1 = cos nθ1 cos mθ1 + sin nθ1 sin mθ1 −(sin nθ1 cos mθ1 − cos nθ1 sin mθ1) sin nθ1 cos mθ1 − cos nθ1 sin mθ1 cos nθ1 cos mθ1 + sin nθ1 sin mθ1 = cos (n − m)θ1 − sin (n − m)θ1 sin (n − m)θ1 cos (n − m)θ1 = Rd Θ,n−m 2.1.3 RoPE ͷਤࣜԽ RoPE ͷࣜਤ 2.2 ͷΑ͏ʹਤࣜԽ͞Ε·͢ɻ ˛ਤ 2.2 RoPE ͷਤࣜԽ (RoPE จ Figure 1) ਤ 2.2 ͷཧղʹ͋ͨͬͯɺ ʮ֤τʔΫϯͷࢄදݱͷཁૉΛ 2 ͭͣͭऔ 27
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}