the hanger and place it on the clothing rack Objects: a cloth hanger, a clothing rack Task: Place the dishes and cutlery on the table in preparation for a meal Objects: a dish plate, a fork, a spoon, a steak knife LLMのバックエンドにはGPT-4を使っている。別のモデルへのUpgradeは可能。
soup タスクの説明: The robot arm places a bowl of soup inside the microwave, closes the door and sets the microwave timer for an appropriate heating duration(日本語訳:ロボットアームがスープの入ったボウルを電子レンジ内に入れ、ドアを閉め、適切な 加熱時間にタイマーを設定する) 追加情報: A bowl of soup オブジェクトの情報: joint 0 (for opening the microwave door), joint 1 (for setting the timer), link 0 (the door), link 1 (the timer knob)
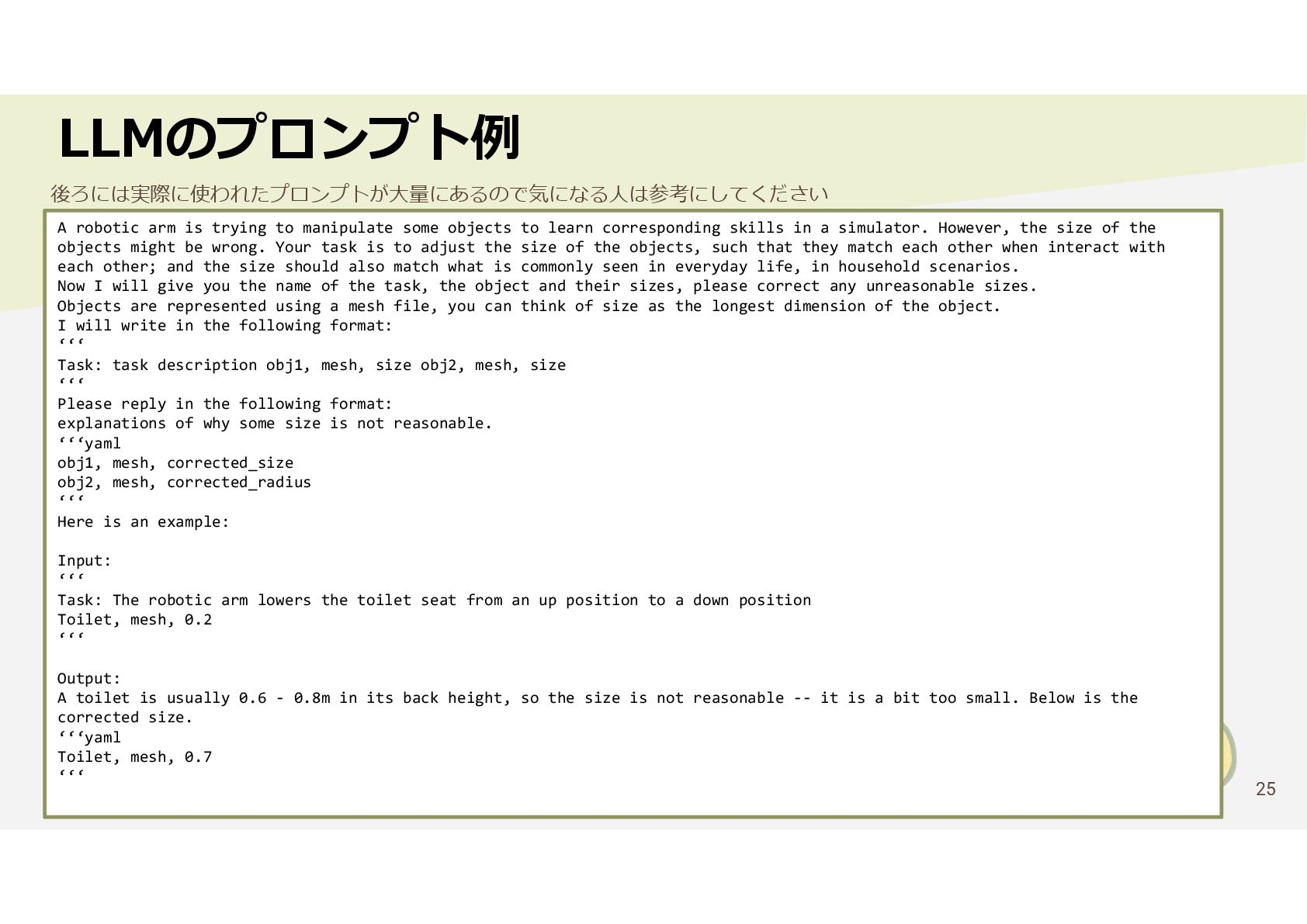
some objects to learn corresponding skills in a simulator. However, the size of the objects might be wrong. Your task is to adjust the size of the objects, such that they match each other when interact with each other; and the size should also match what is commonly seen in everyday life, in household scenarios. Now I will give you the name of the task, the object and their sizes, please correct any unreasonable sizes. Objects are represented using a mesh file, you can think of size as the longest dimension of the object. I will write in the following format: ‘‘‘ Task: task description obj1, mesh, size obj2, mesh, size ‘‘‘ Please reply in the following format: explanations of why some size is not reasonable. ‘‘‘yaml obj1, mesh, corrected_size obj2, mesh, corrected_radius ‘‘‘ Here is an example: Input: ‘‘‘ Task: The robotic arm lowers the toilet seat from an up position to a down position Toilet, mesh, 0.2 ‘‘‘ Output: A toilet is usually 0.6 - 0.8m in its back height, so the size is not reasonable -- it is a bit too small. Below is the corrected size. ‘‘‘yaml Toilet, mesh, 0.7 ‘‘‘
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}