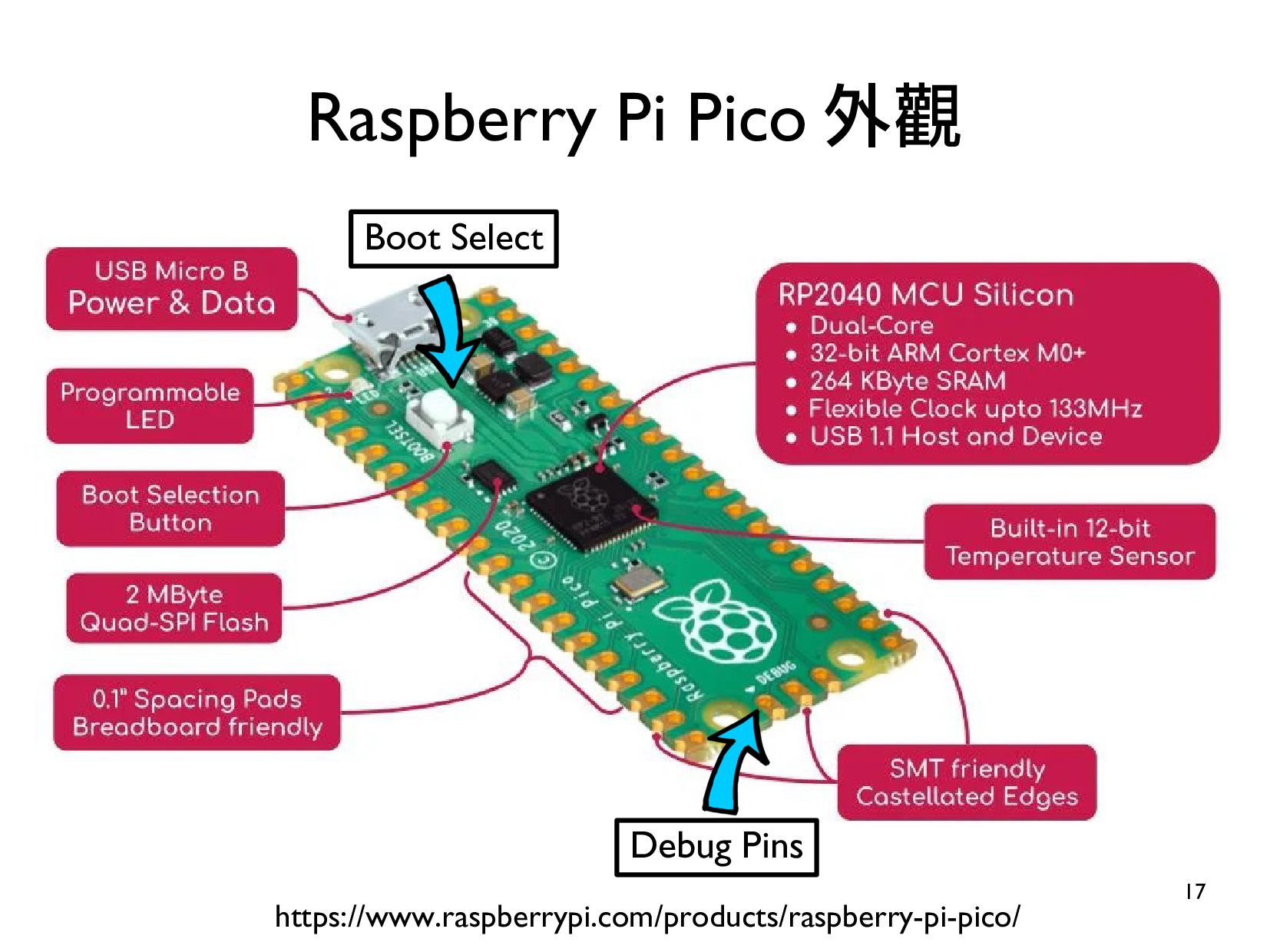
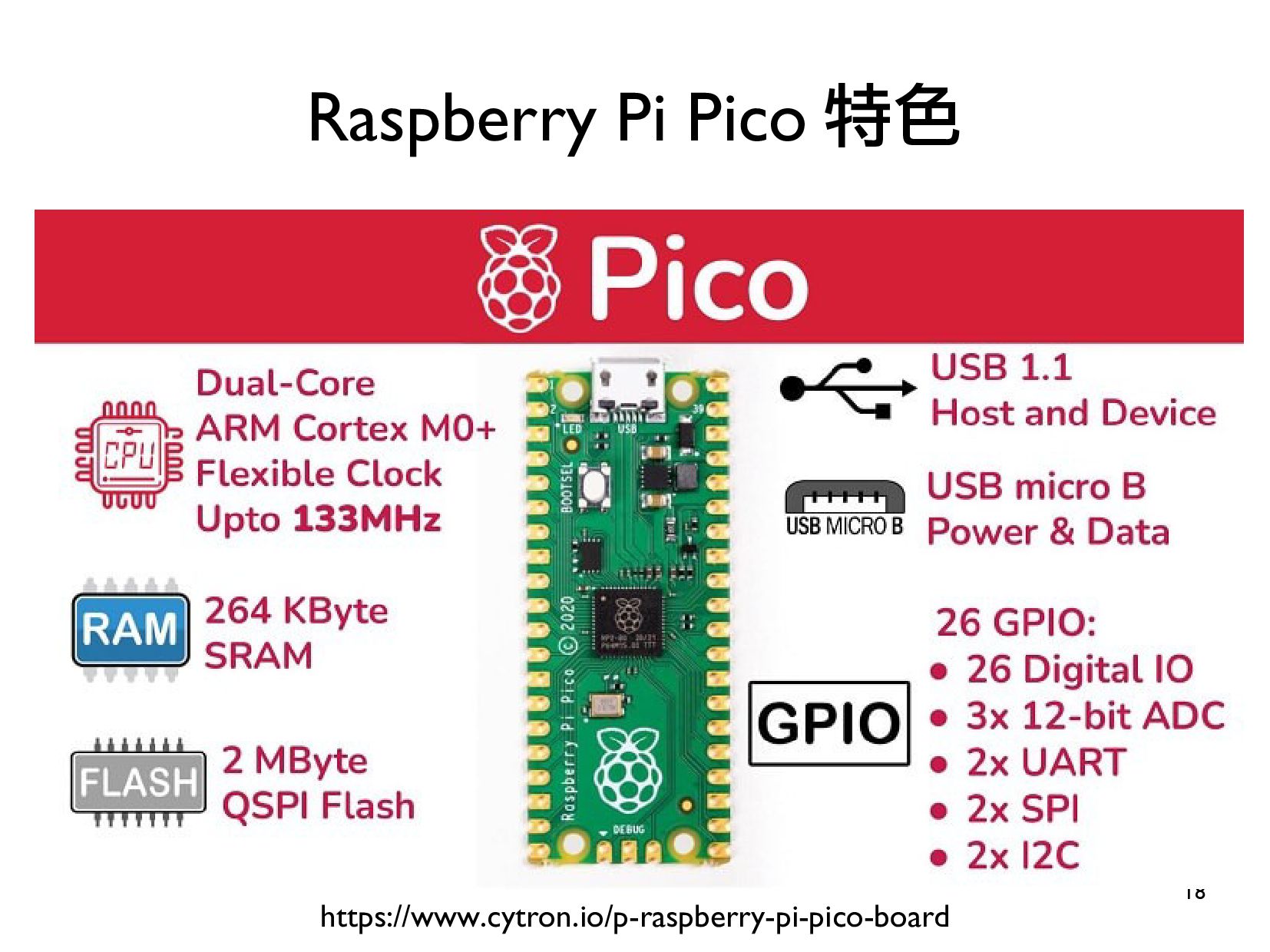
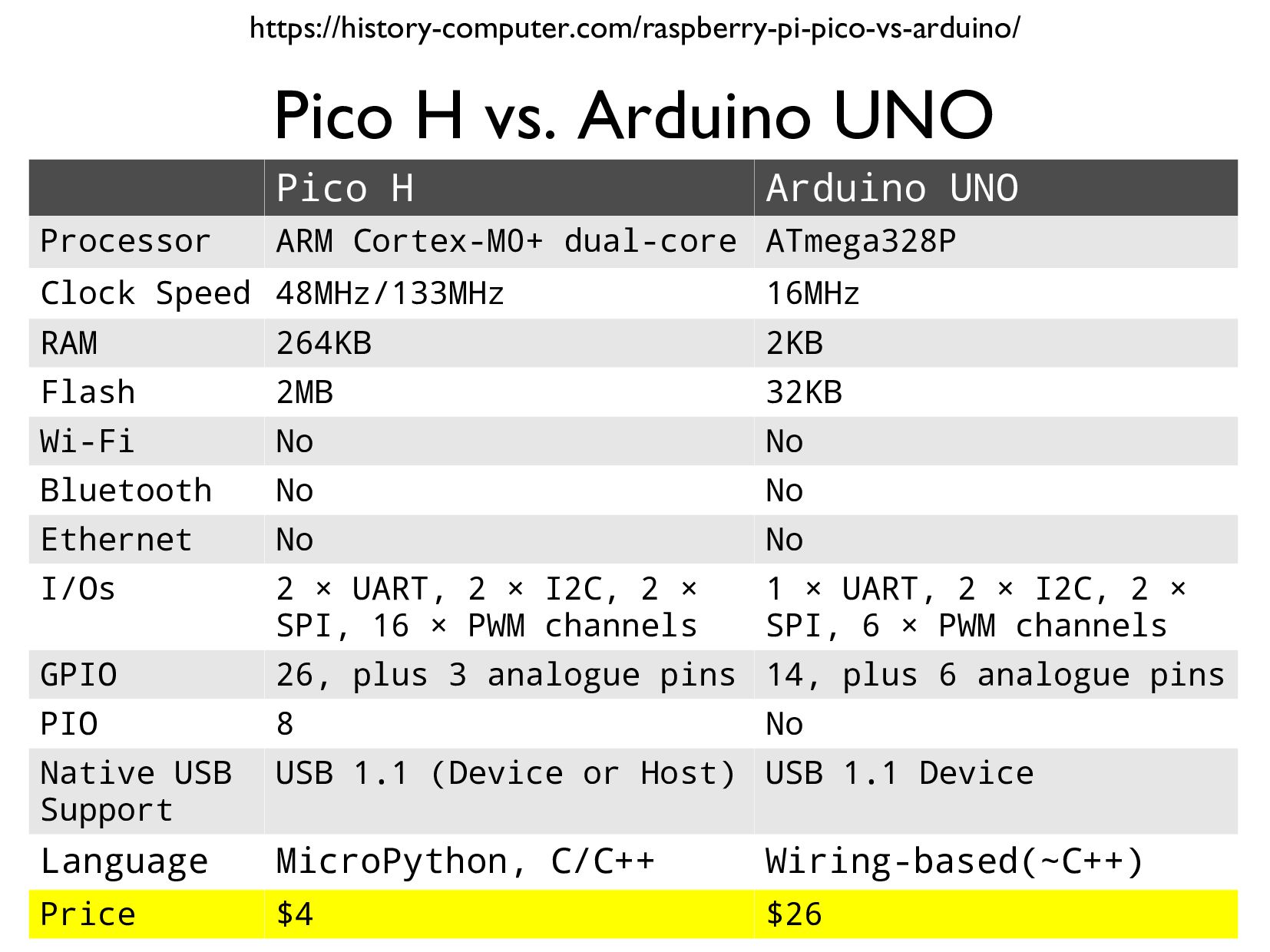
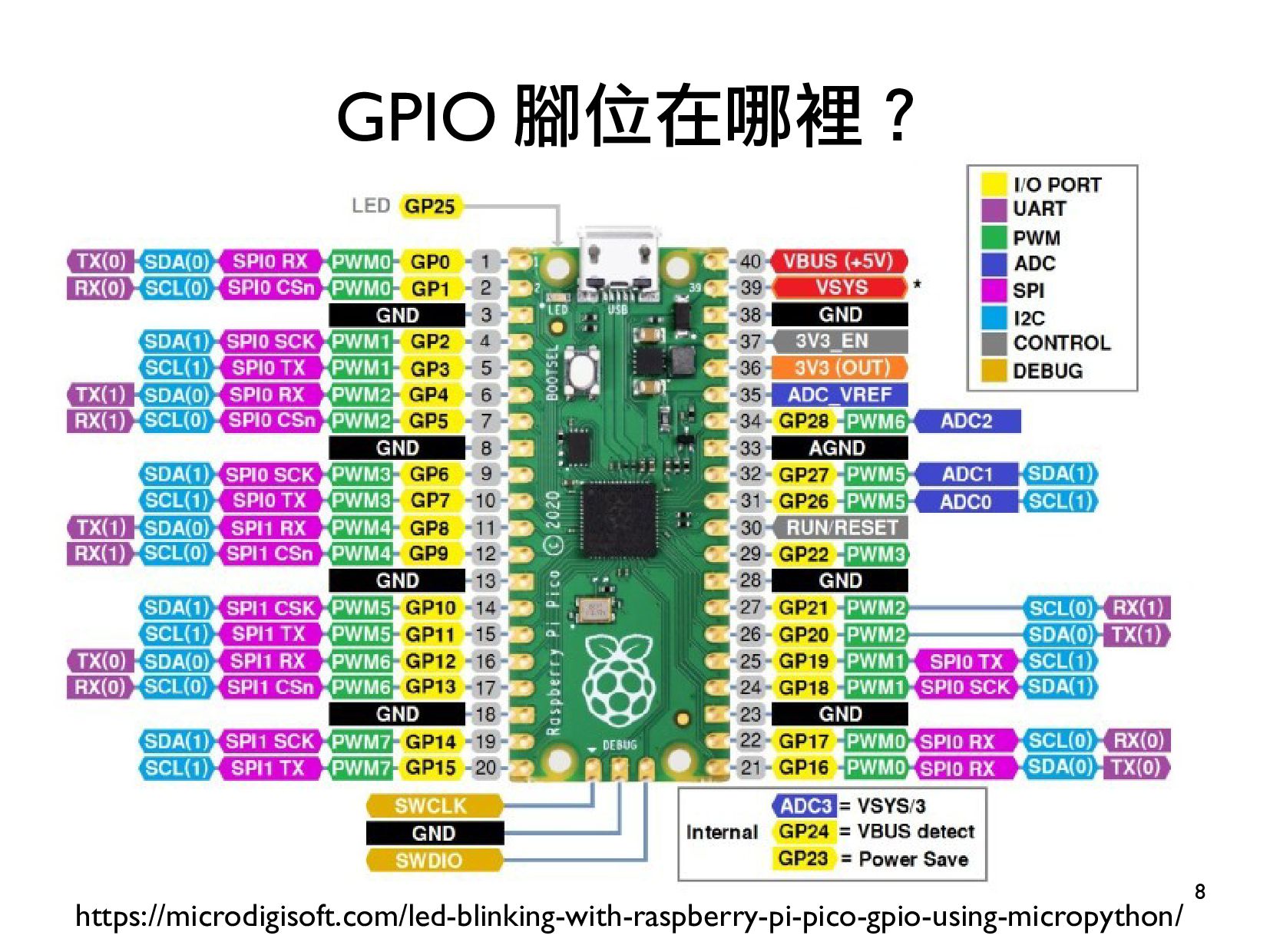
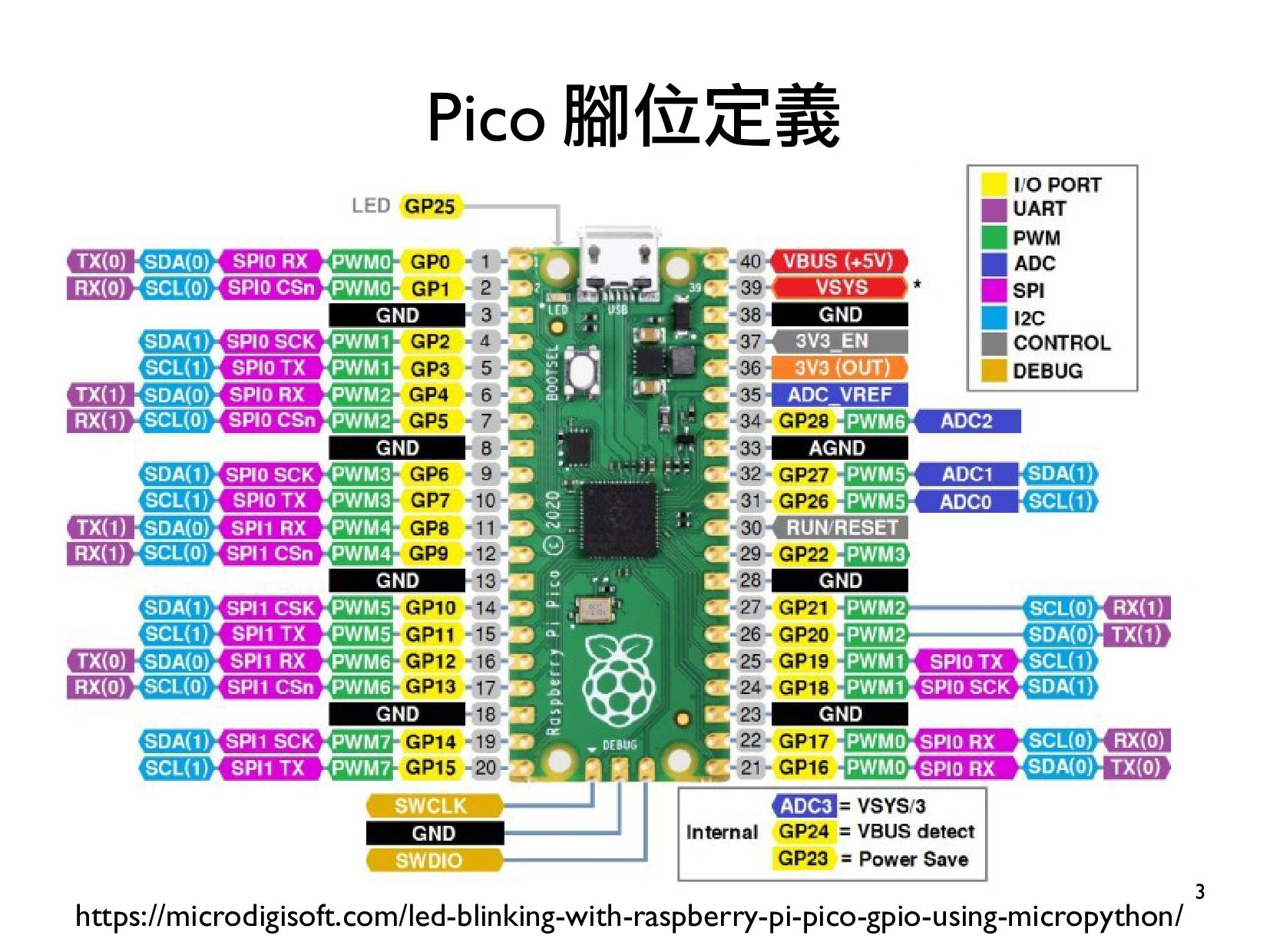
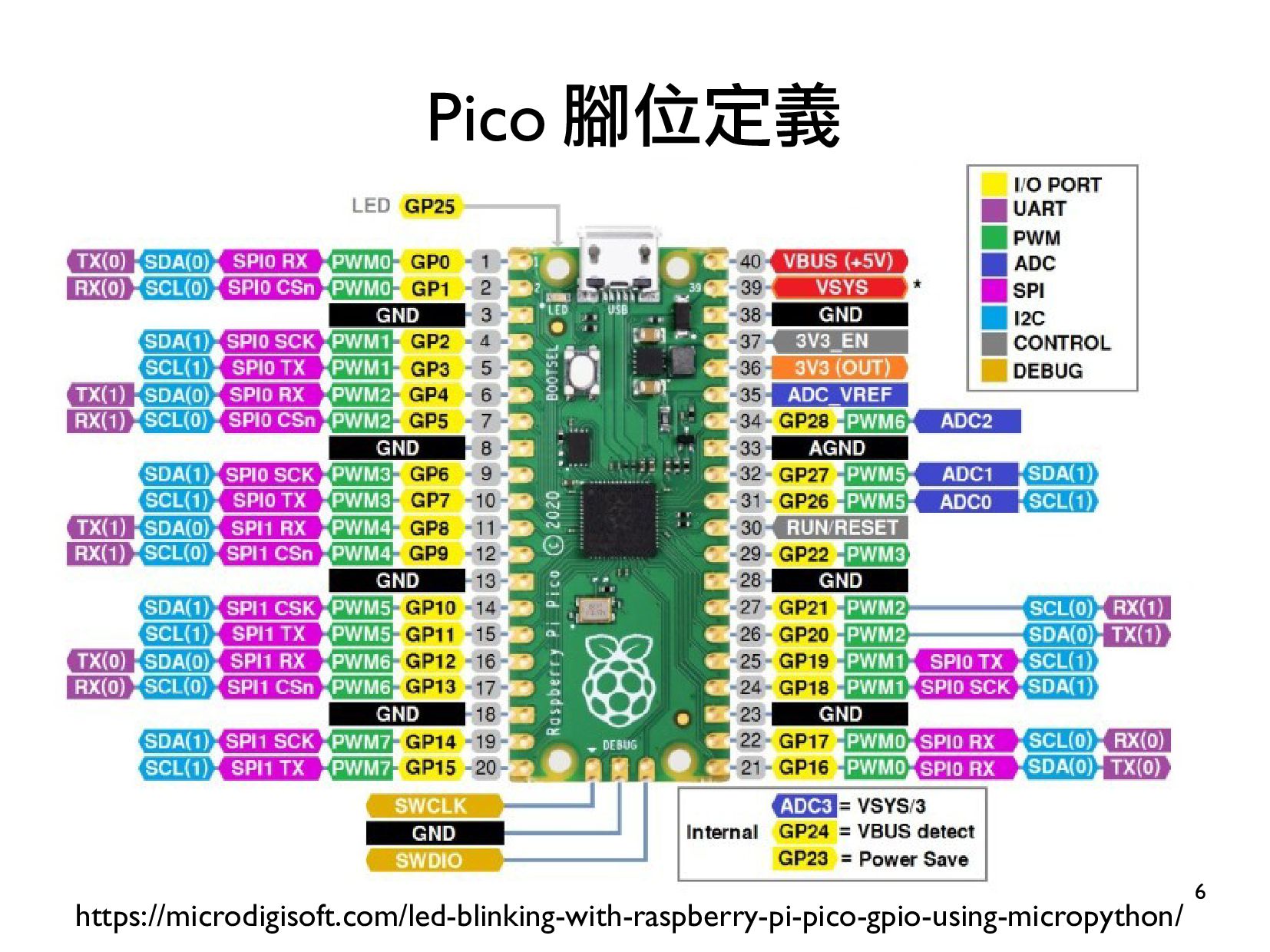
Processor ARM Cortex-M0+ dual-core ATmega328P Clock Speed 48MHz/133MHz 16MHz RAM 264KB 2KB Flash 2MB 32KB Wi-Fi No No Bluetooth No No Ethernet No No I/Os 2 × UART, 2 × I2C, 2 × SPI, 16 × PWM channels 1 × UART, 2 × I2C, 2 × SPI, 6 × PWM channels GPIO 26, plus 3 analogue pins 14, plus 6 analogue pins PIO 8 No Native USB Support USB 1.1 (Device or Host) USB 1.1 Device Language MicroPython, C/C++ Wiring-based(~C++) Price $4 $26 https://history-computer.com/raspberry-pi-pico-vs-arduino/
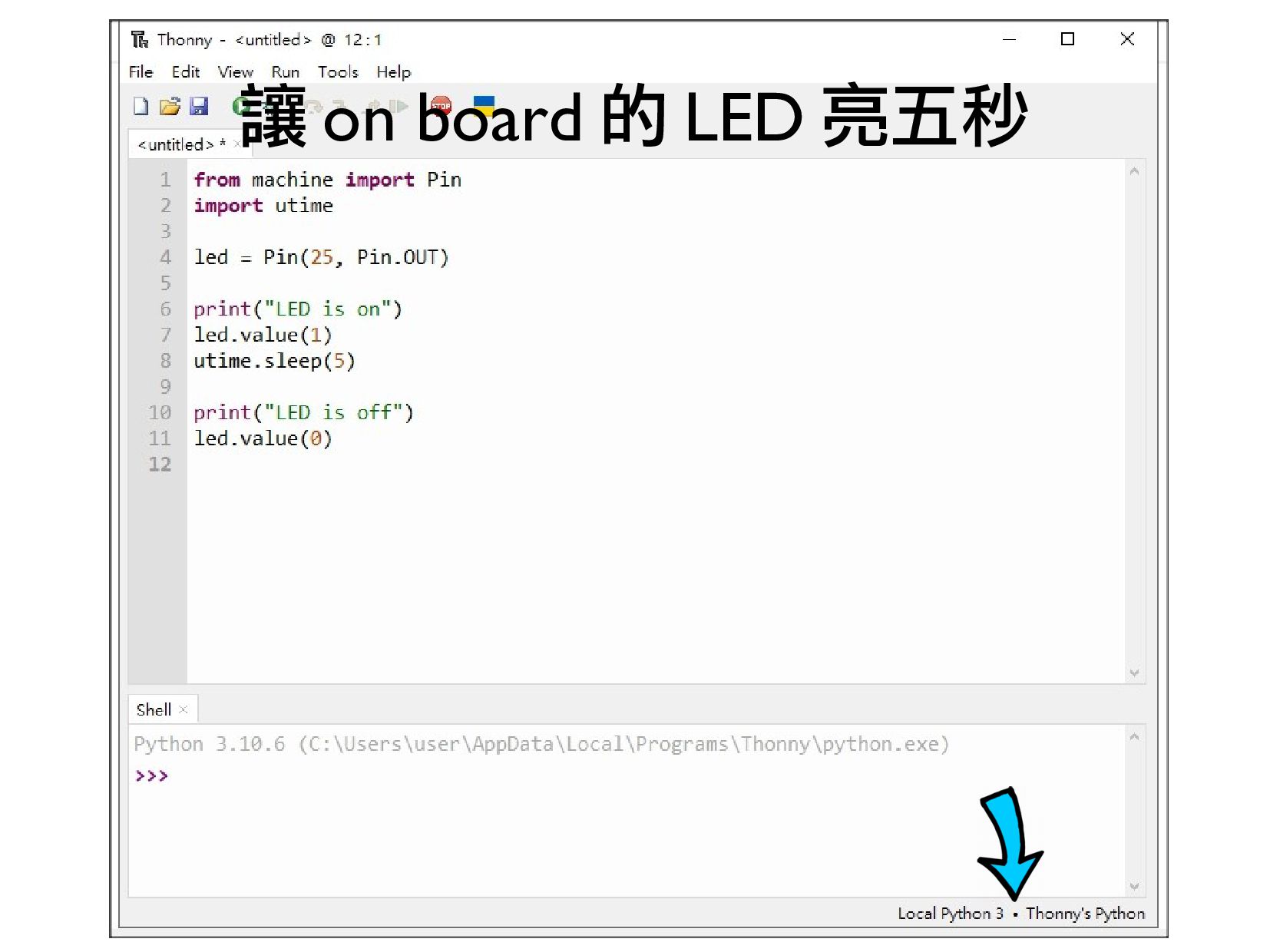
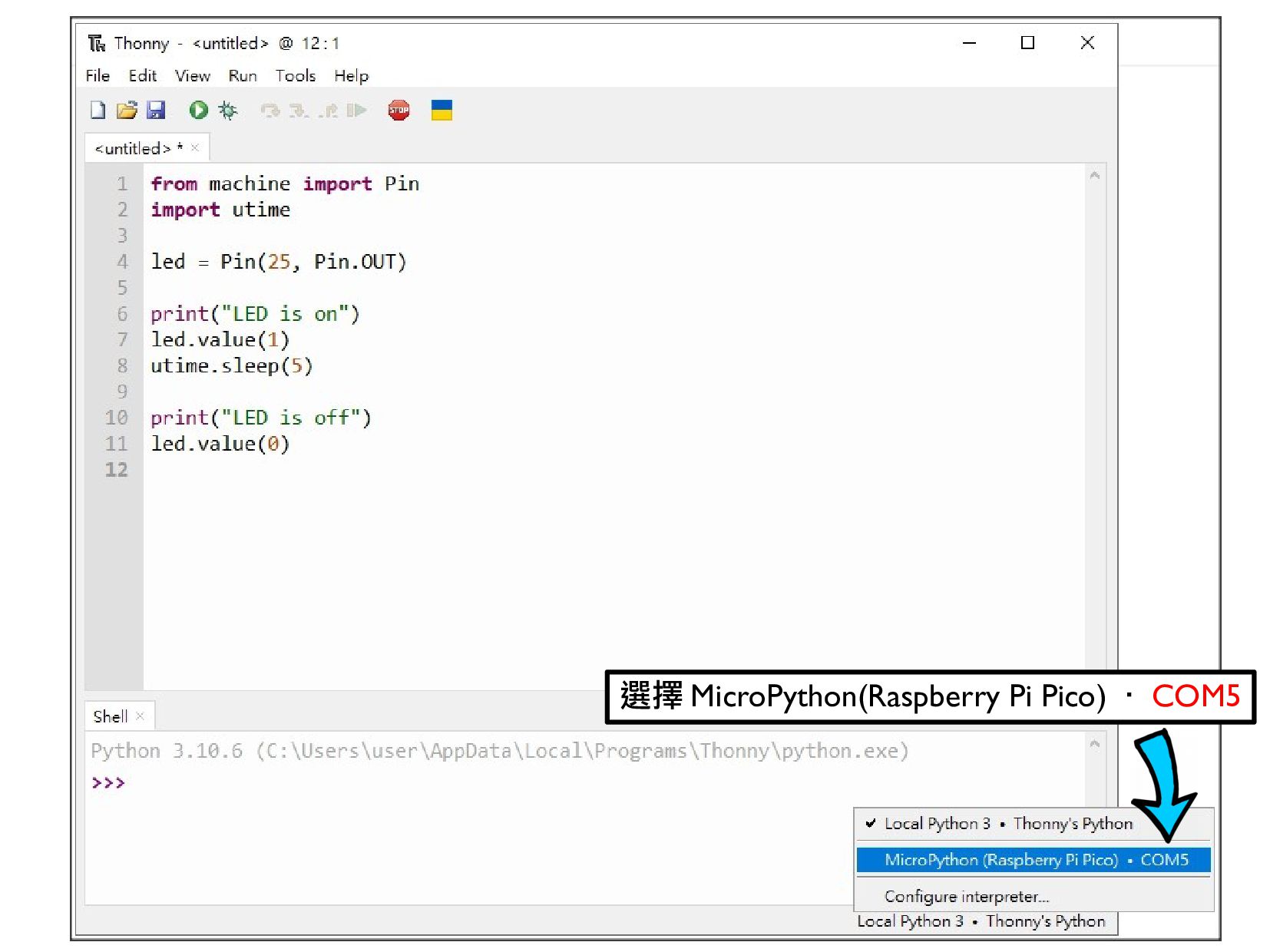
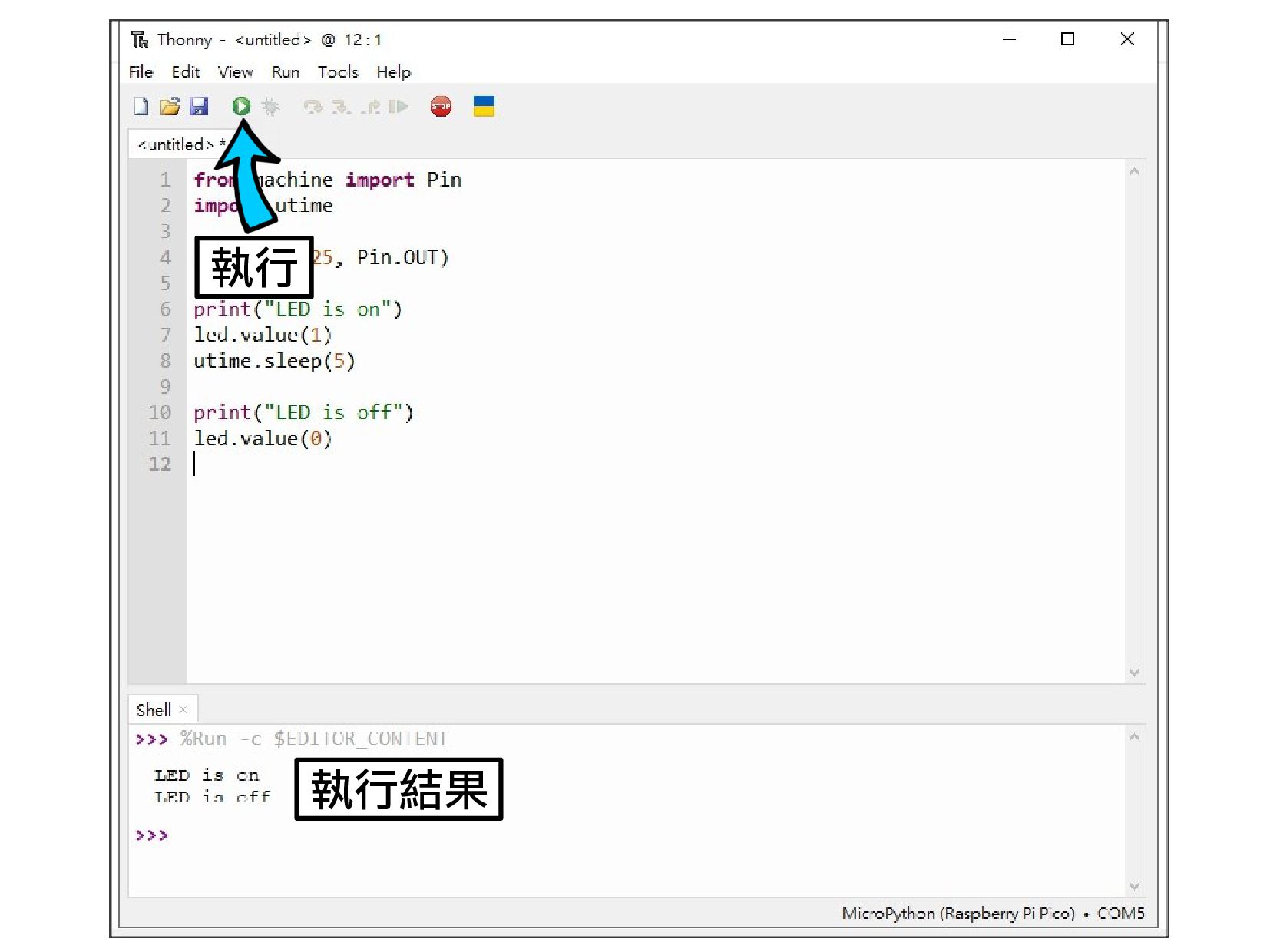
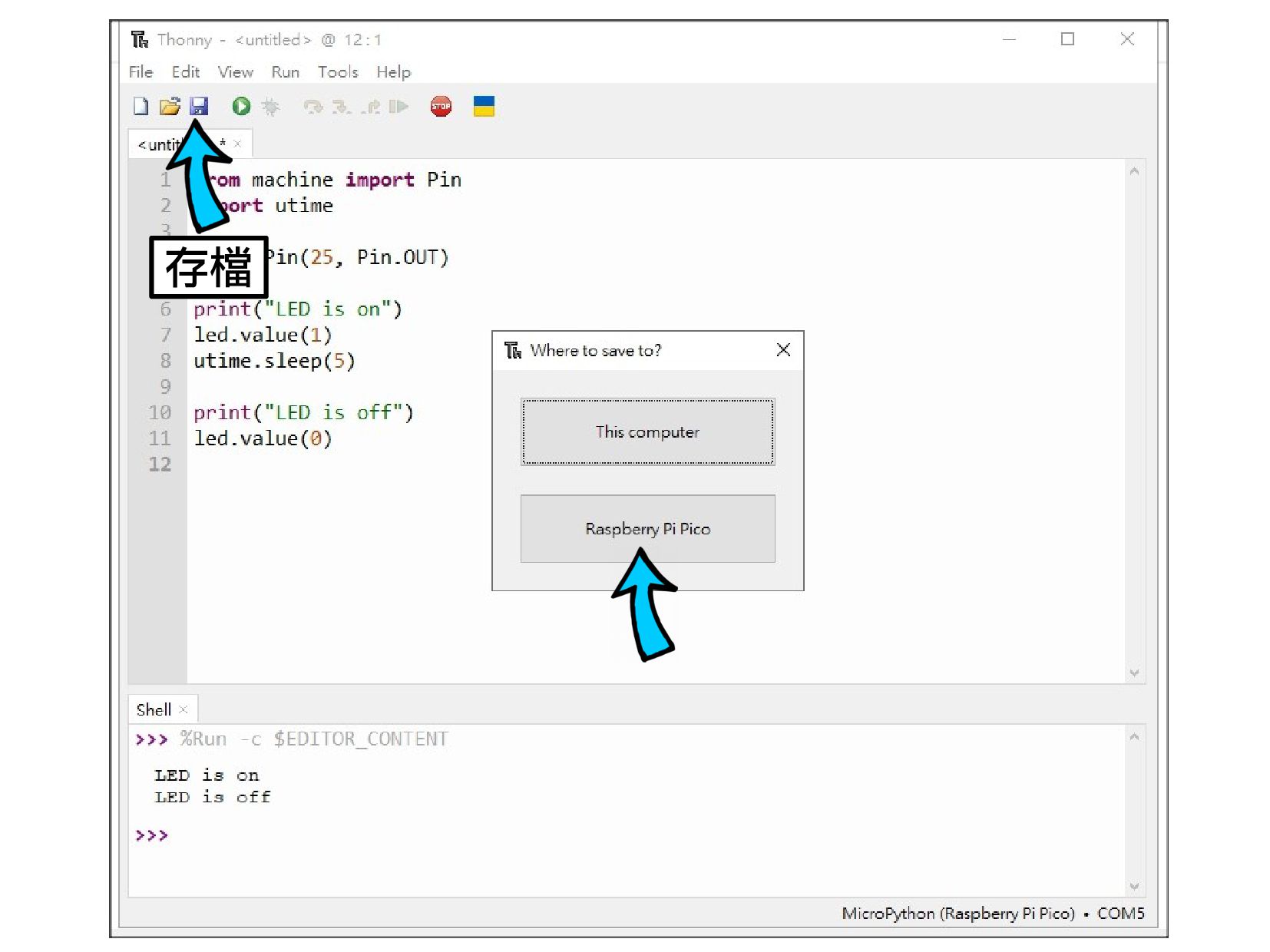
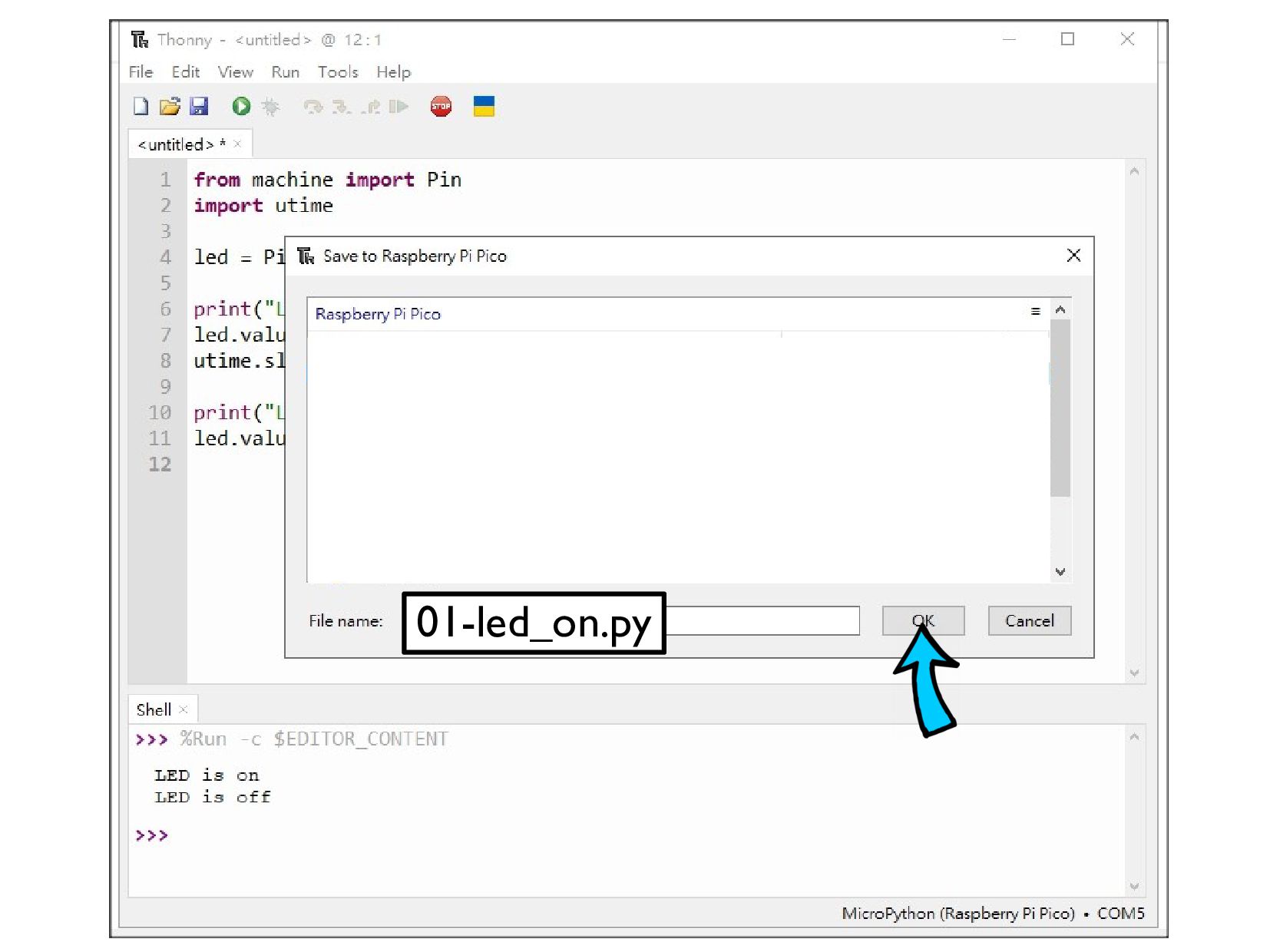
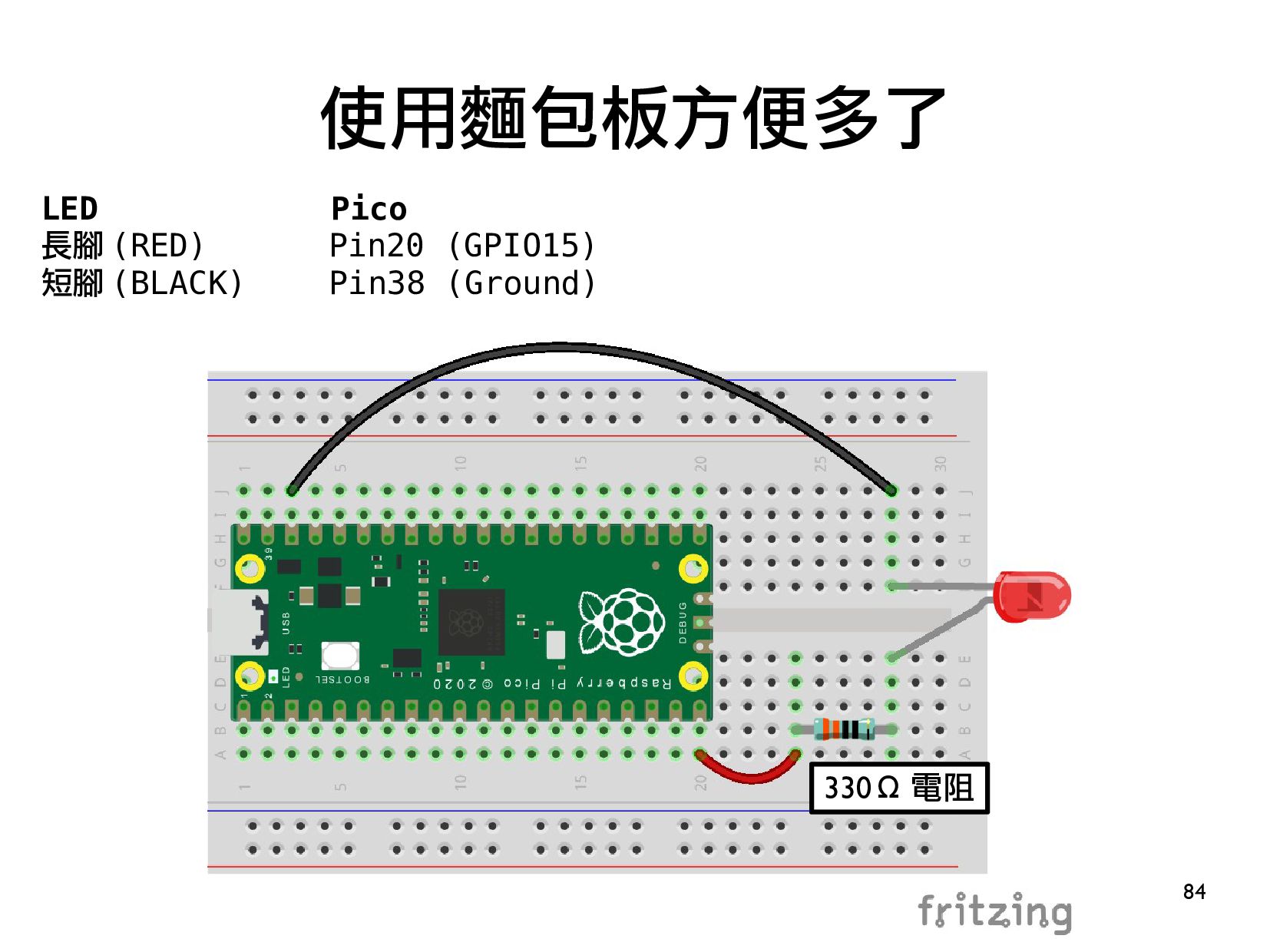
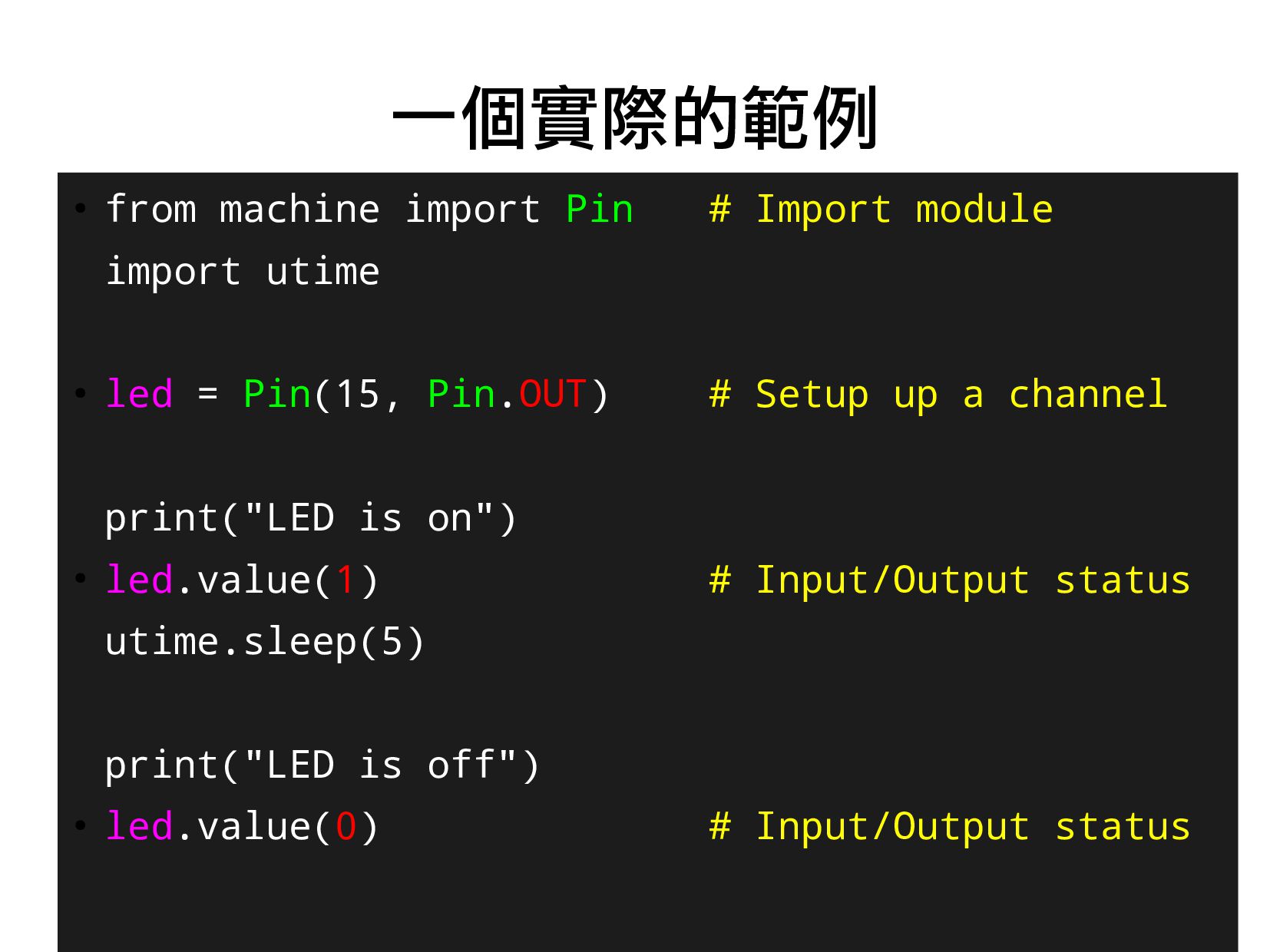
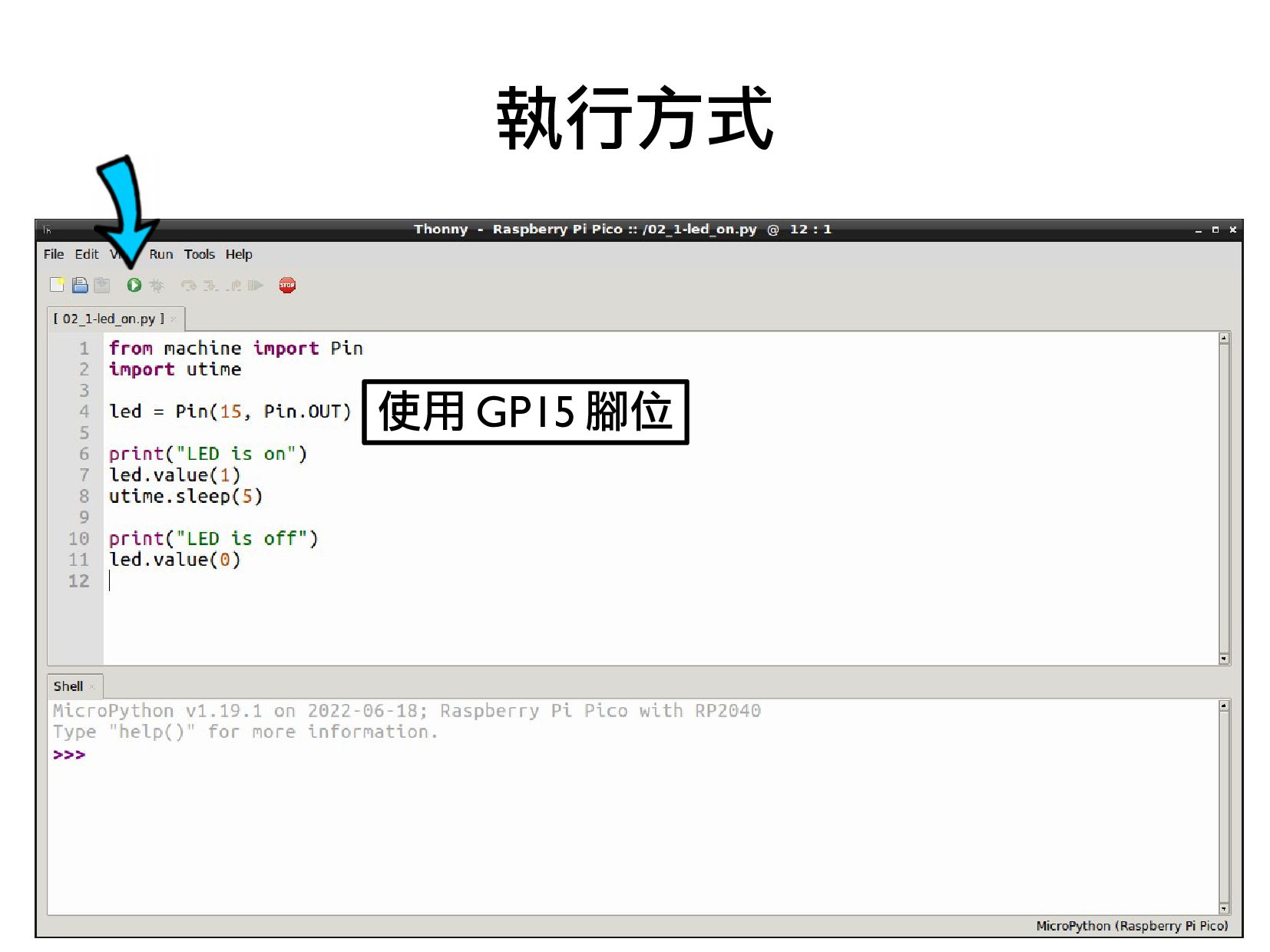
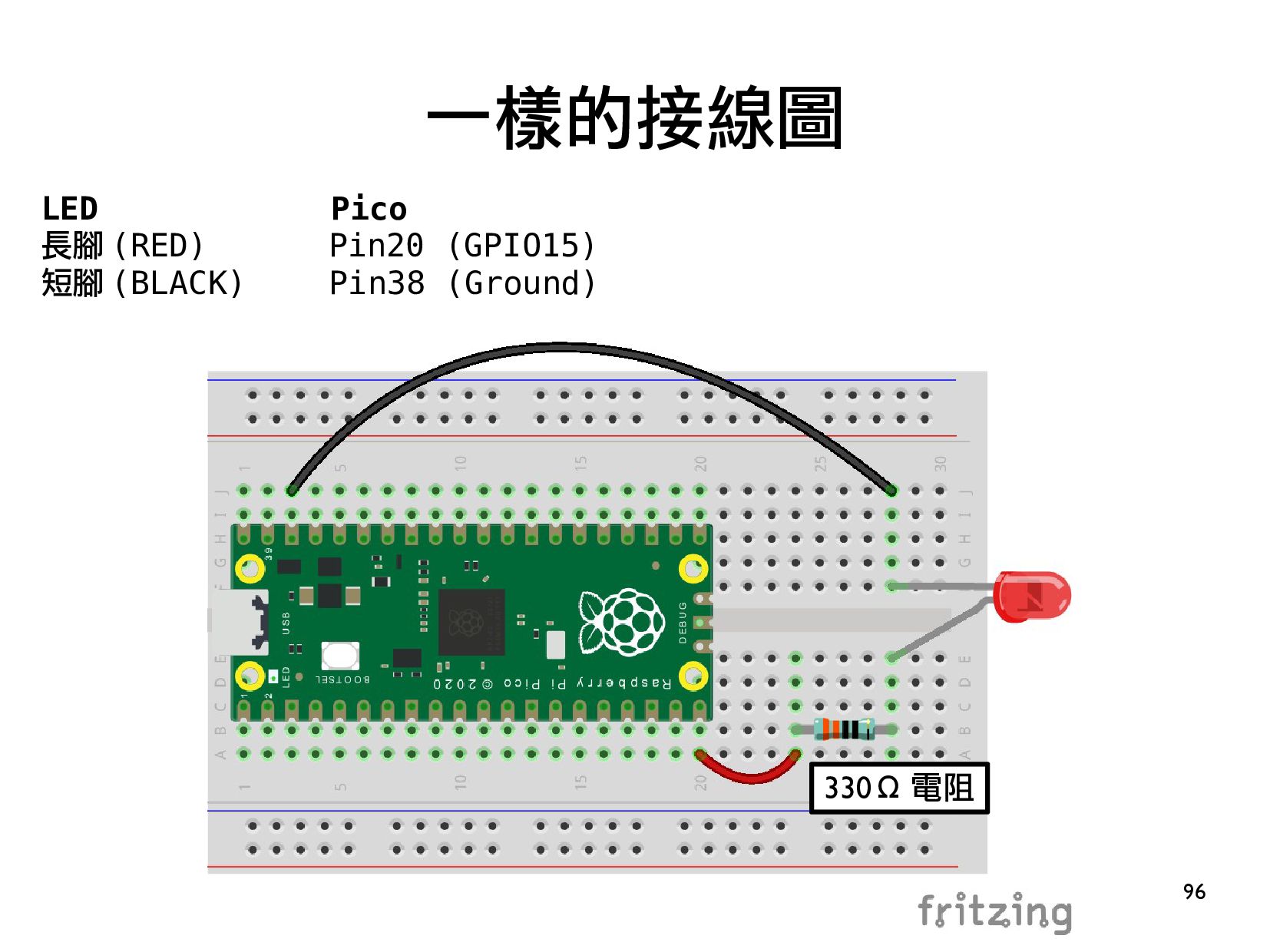
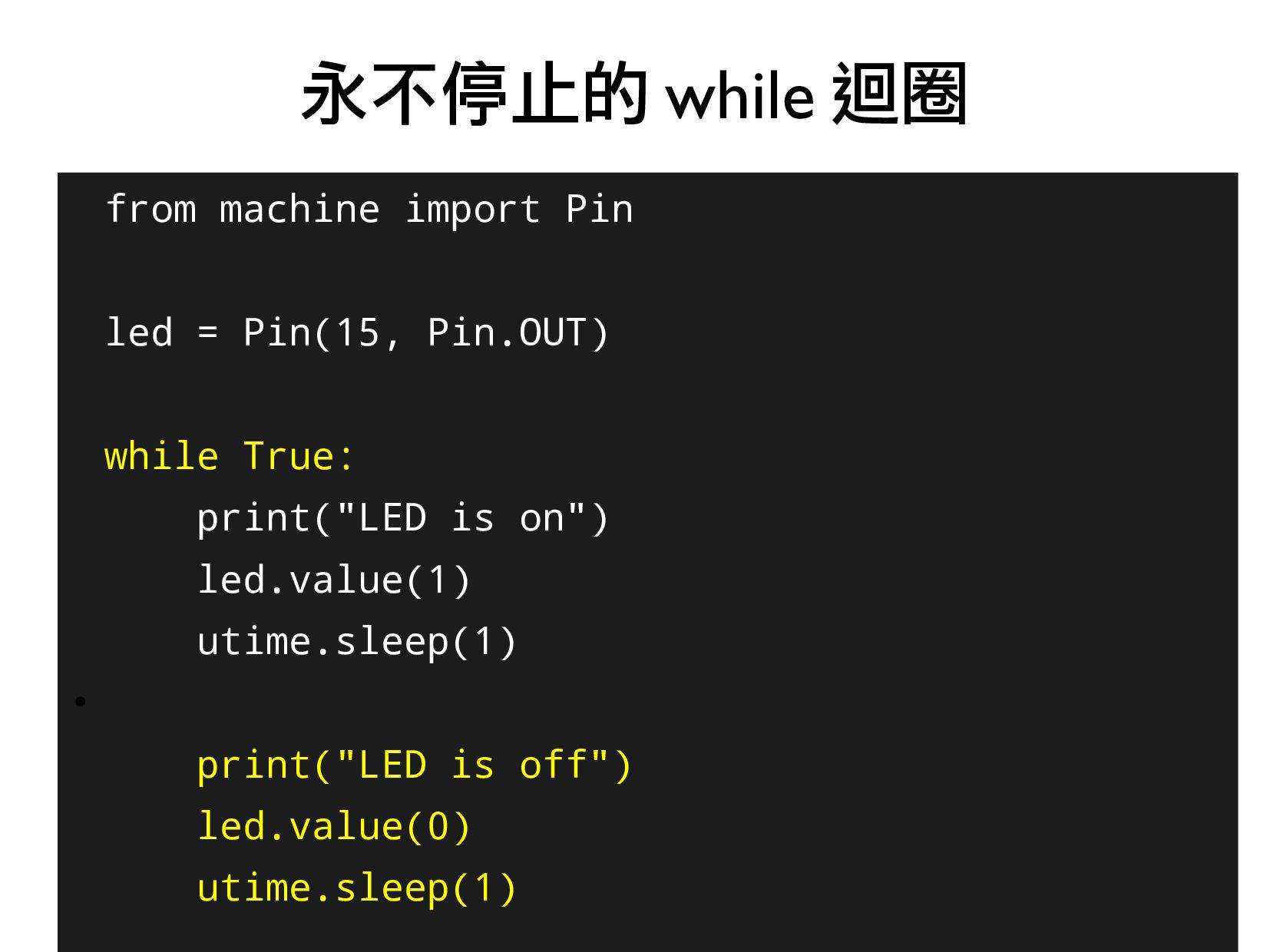
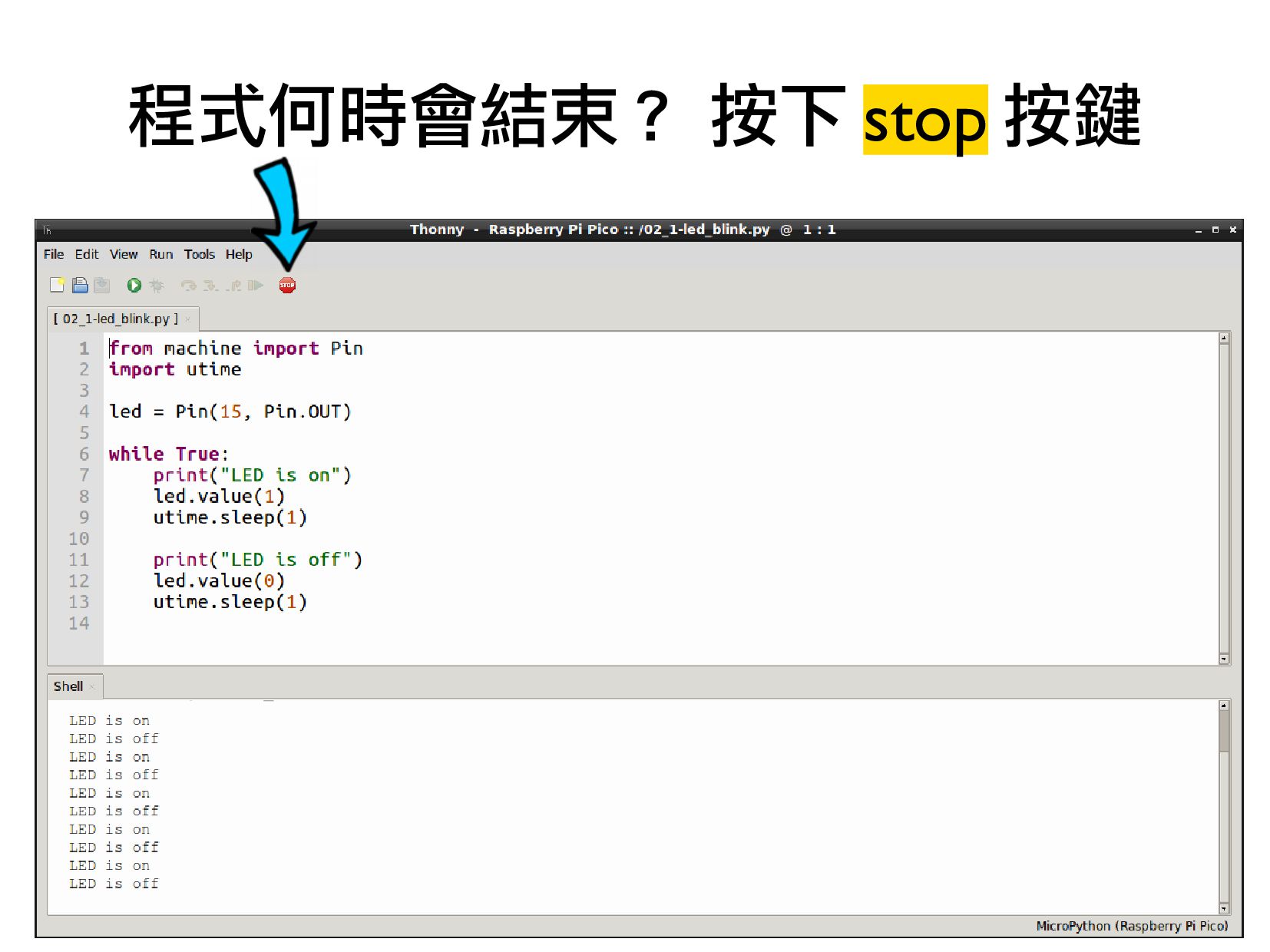
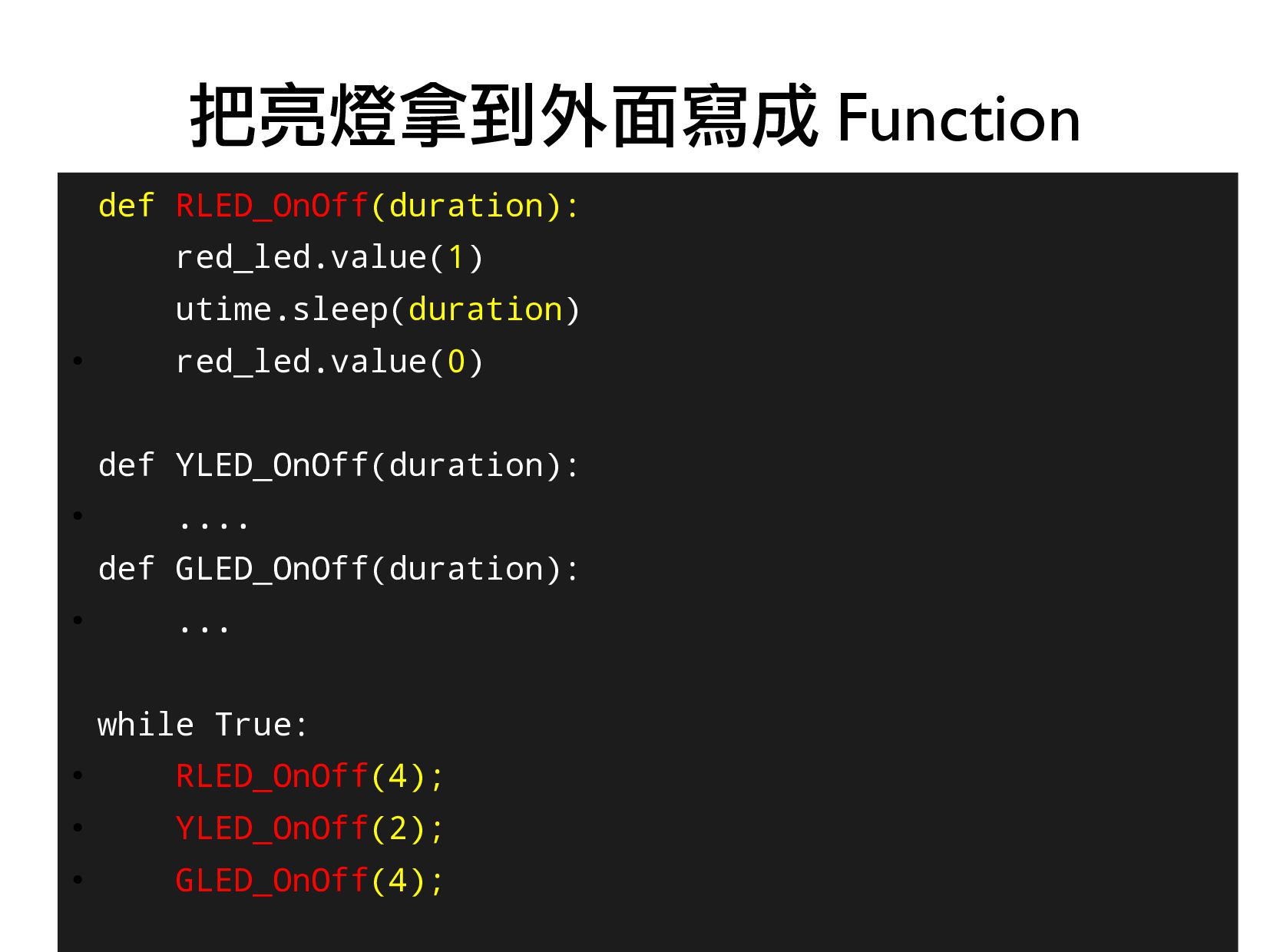
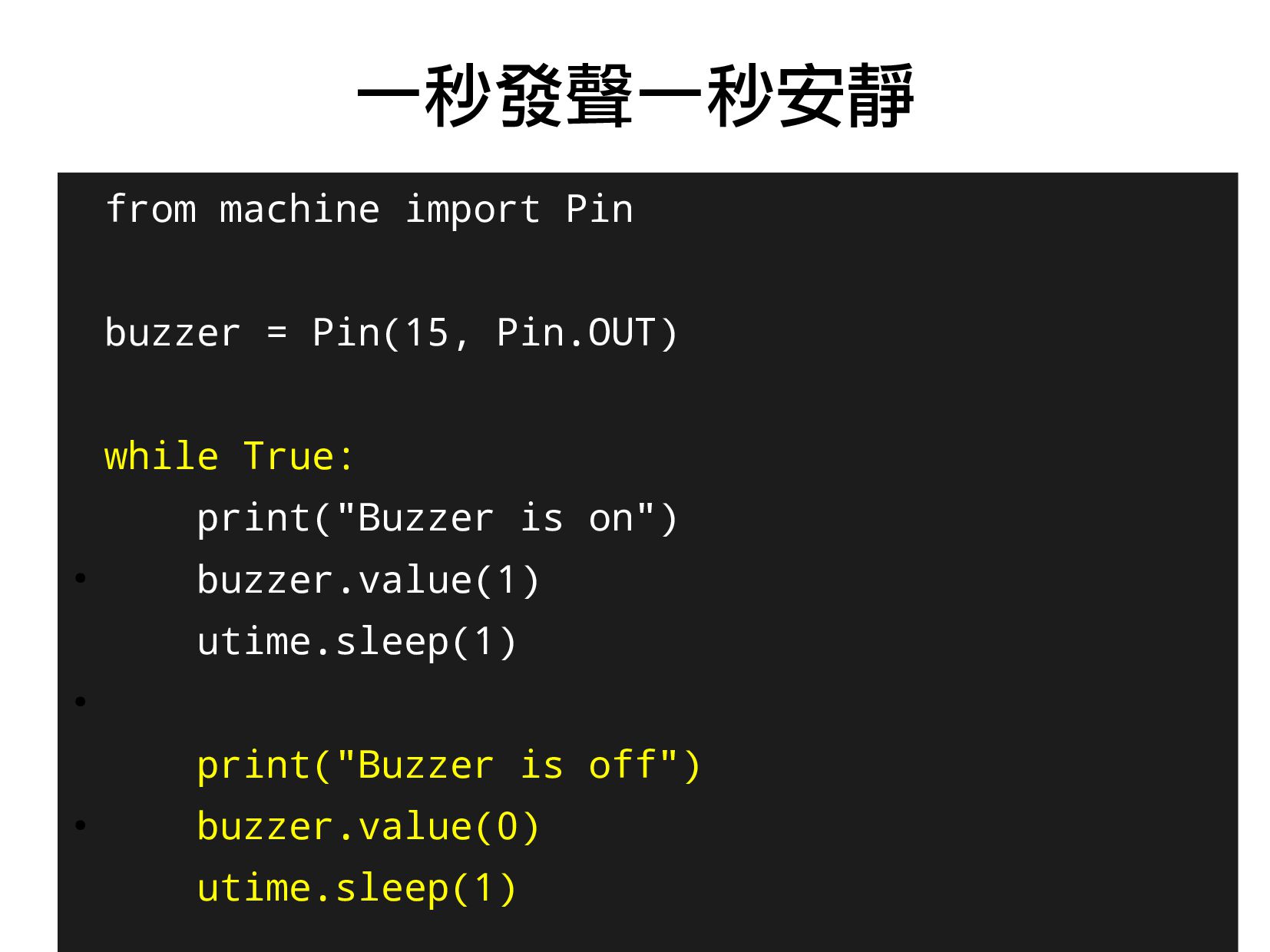
utime • led = Pin(15, Pin.OUT) # Setup up a channel print("LED is on") • led.value(1) # Input/Output status utime.sleep(5) print("LED is off") • led.value(0) # Input/Output status 一個實際的範例
這類型的硬體使用 • 在 MicroPython 中 , 使用 utime 模組等於 time (time is an alias to utime and uses the same code) UTIME vs. TIME https://forum.micropython.org/viewtopic.php?t=8222
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
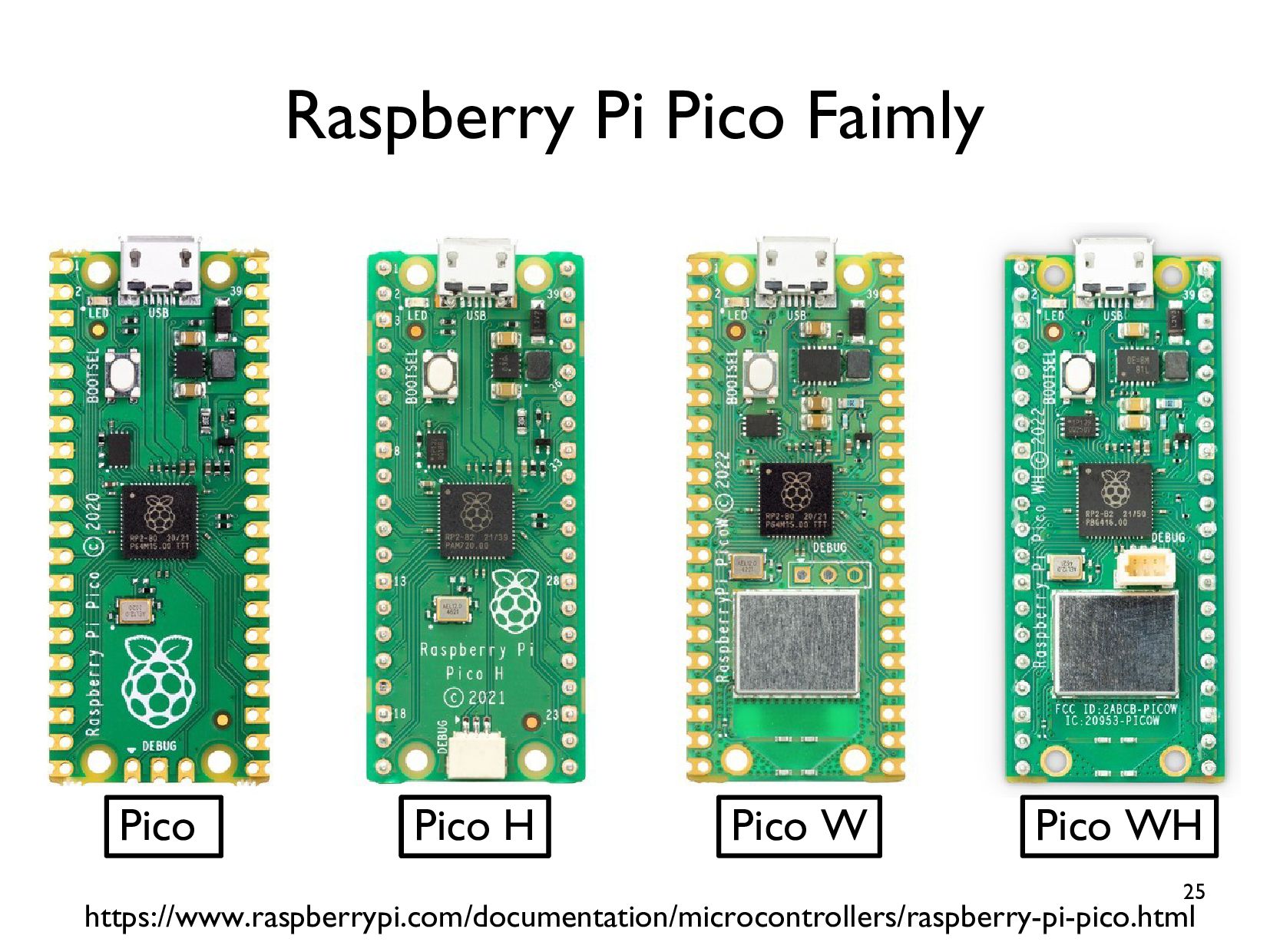
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![66 • 自動迭代 (iterator) for i in range(start, stop[, step]):](https://files.speakerdeck.com/presentations/715e54dd299b48a49800f236527f91e1/slide_65.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}