Share
Opening Keynote at Web Directions Code 2014 in Melbourne, Australia.
Demo code at https://github.com/rockbot/wdc14 and https://github.com/rockbot/manny.
Video for slide 63 can be seen at http://youtu.be/2oNqa-cL_ZQ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
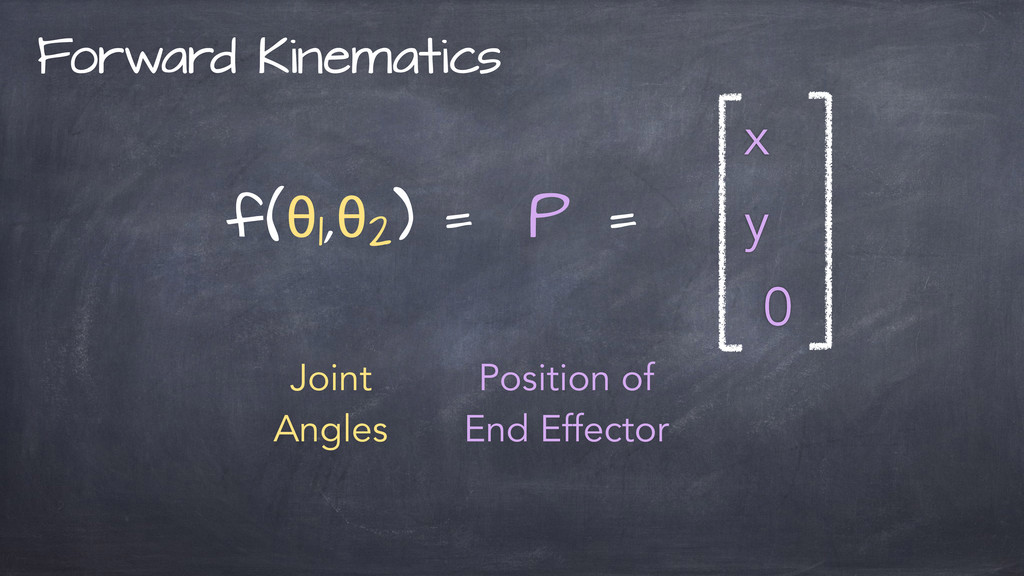
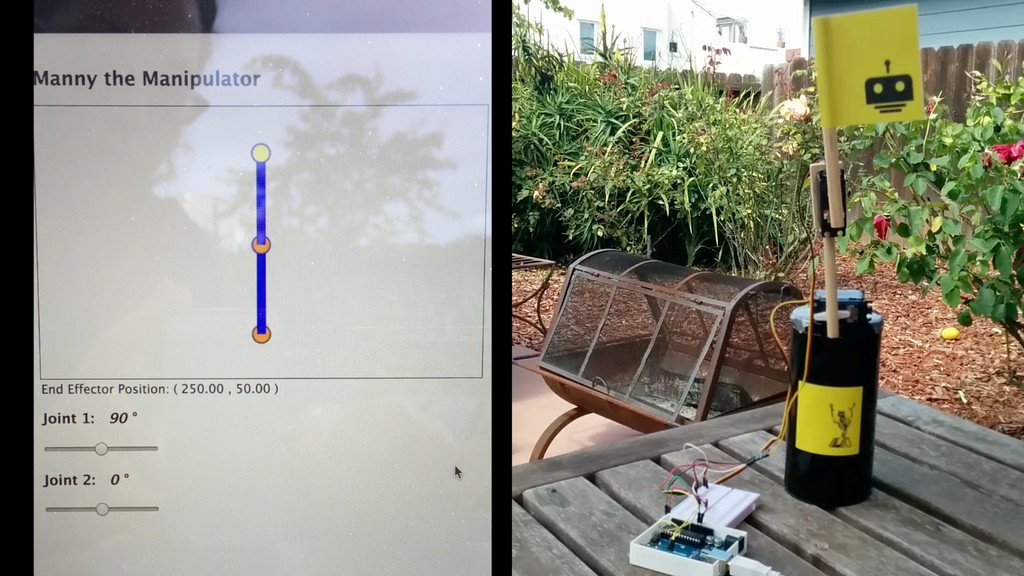
![g(xEE , yEE ) = [θ1 , θ2 ] Joint](https://files.speakerdeck.com/presentations/68acb620b2f9013108406ac252c60ef6/slide_52.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![var servo = five.Servo({ pin: 9, range: [10, 170] });](https://files.speakerdeck.com/presentations/68acb620b2f9013108406ac252c60ef6/slide_60.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}