Tadahiro Taniguchi (Kyoto Univ. / RitsumeikanUniv.), Ryo Ueda (Univ. of Tokyo), Tomoaki Nakamura (UEC),
Masahiro Suzuki (Univ. of Tokyo), Akira Taniguchi (RitsumeikanUniv.)
The 2025 Annual Conference of the Japanese Society for Artificial Intelligence (JSAI)
27th May 2025 (English translation)
[Reference]
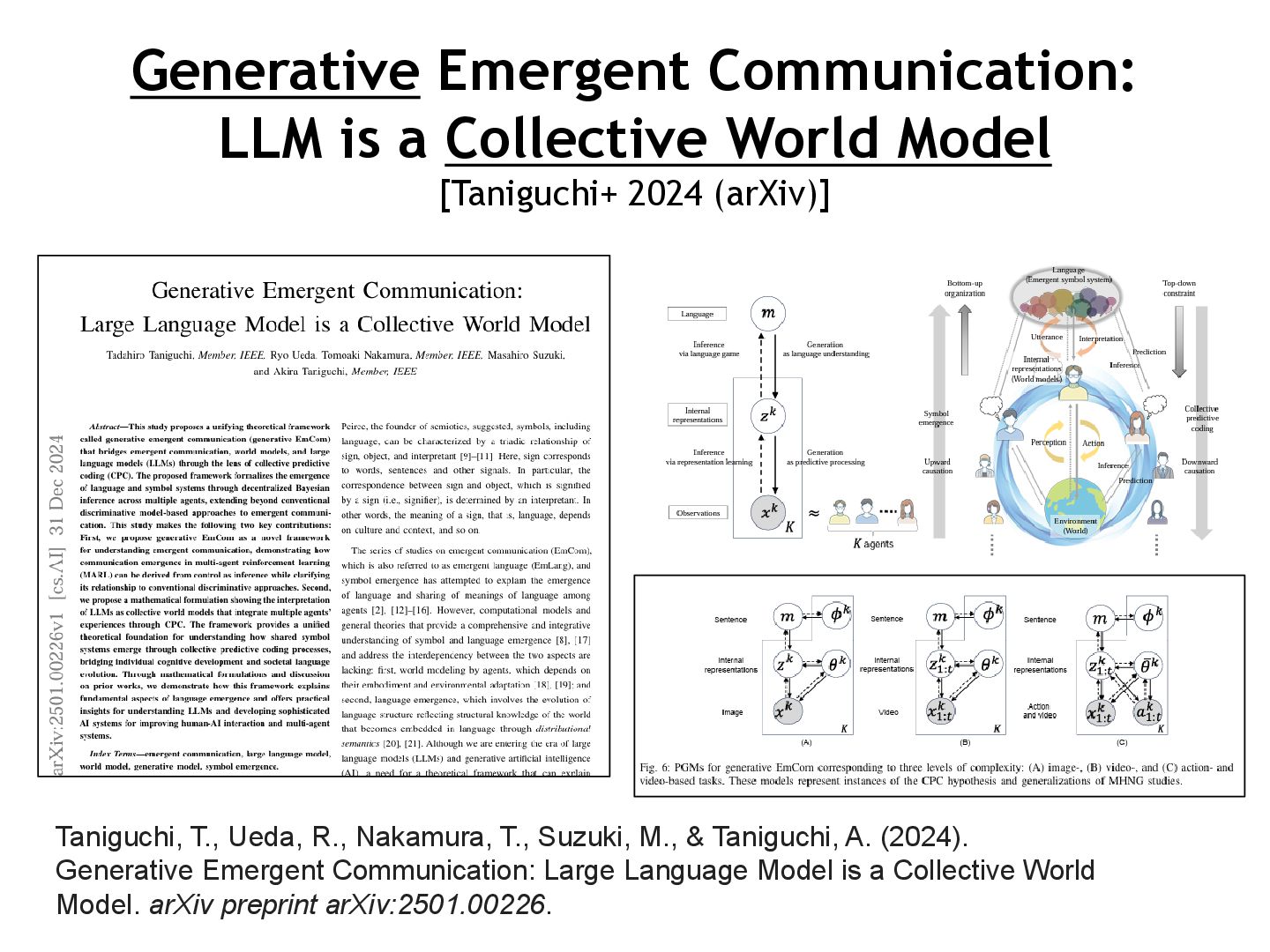
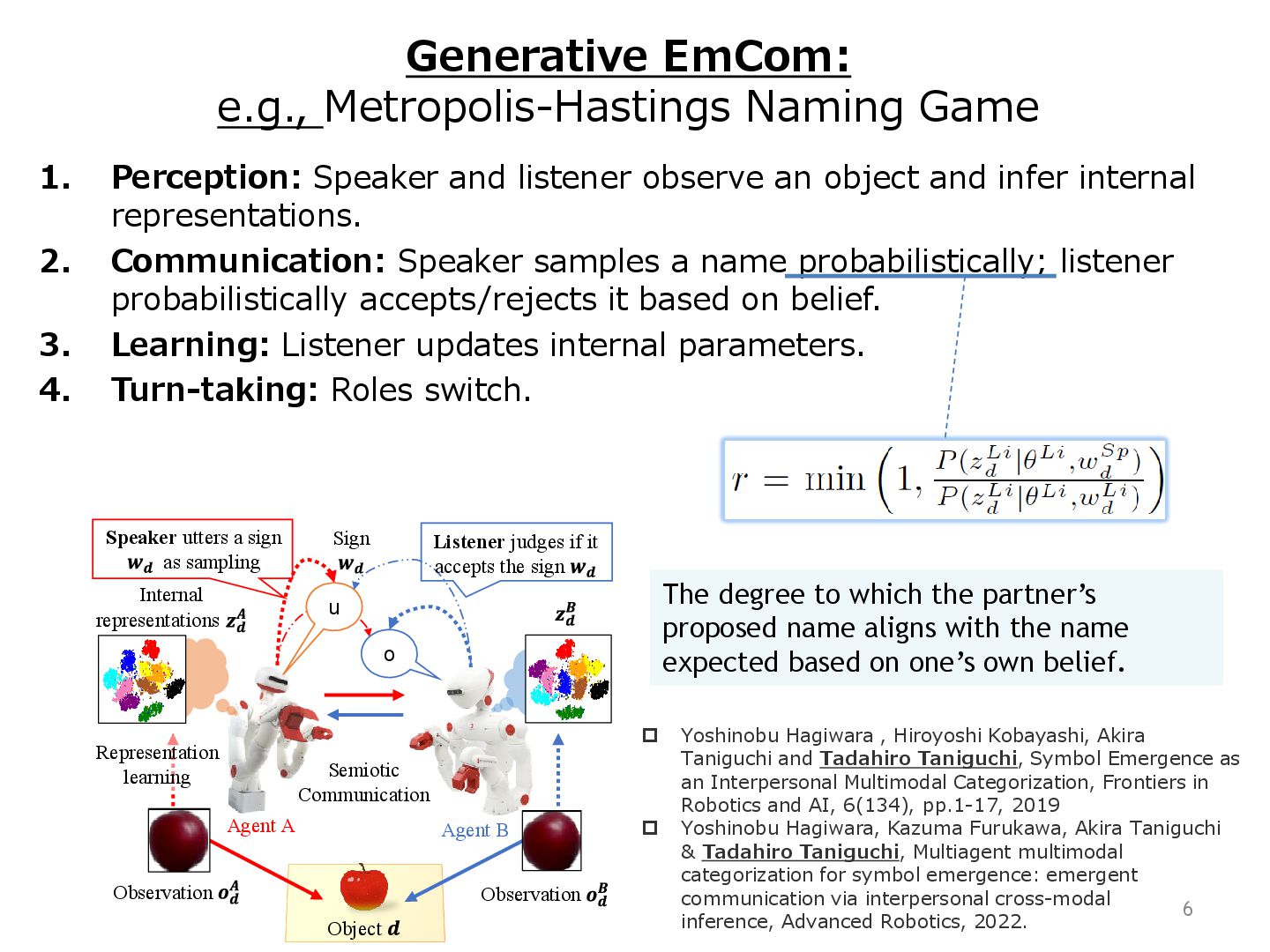
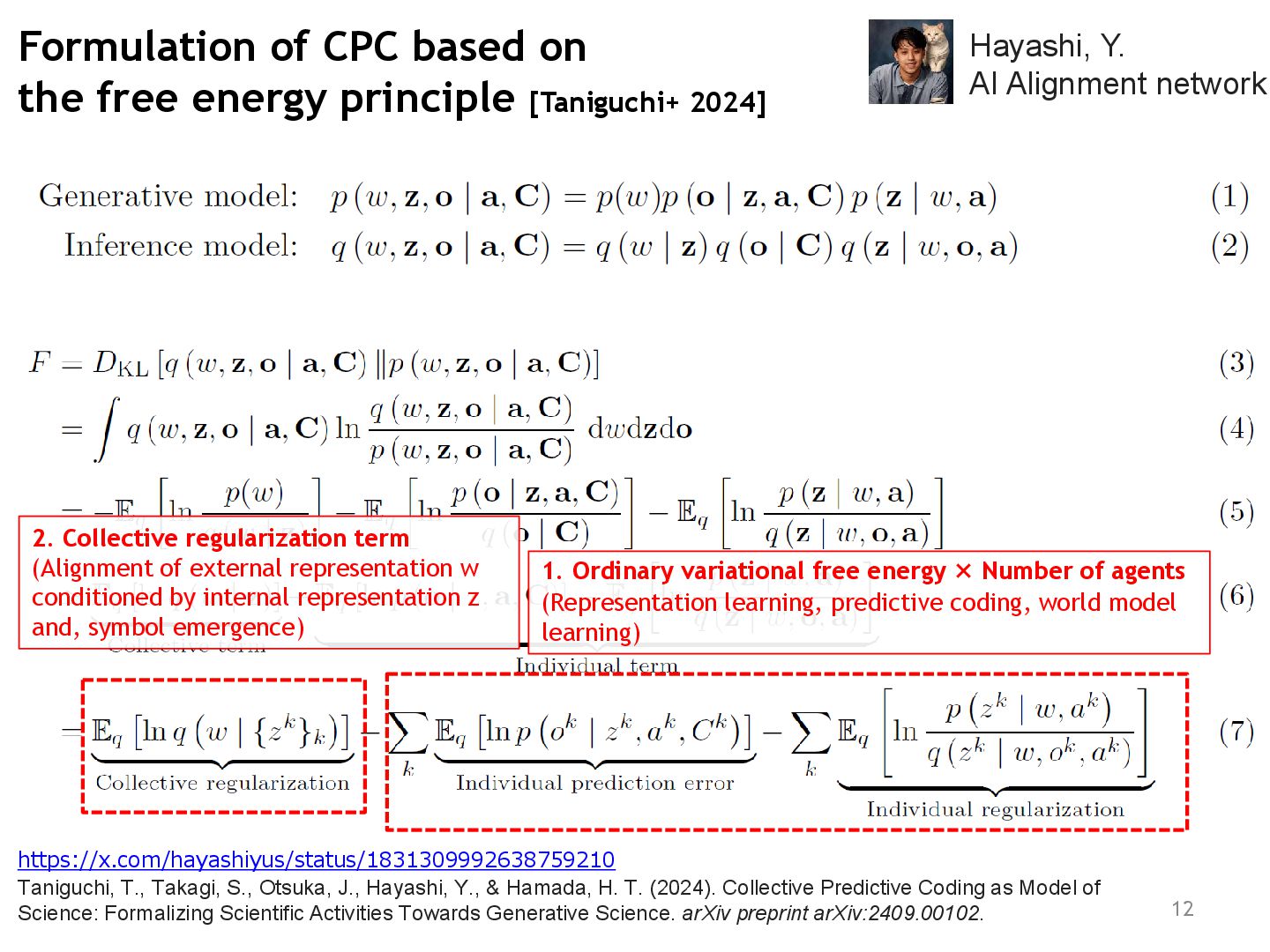
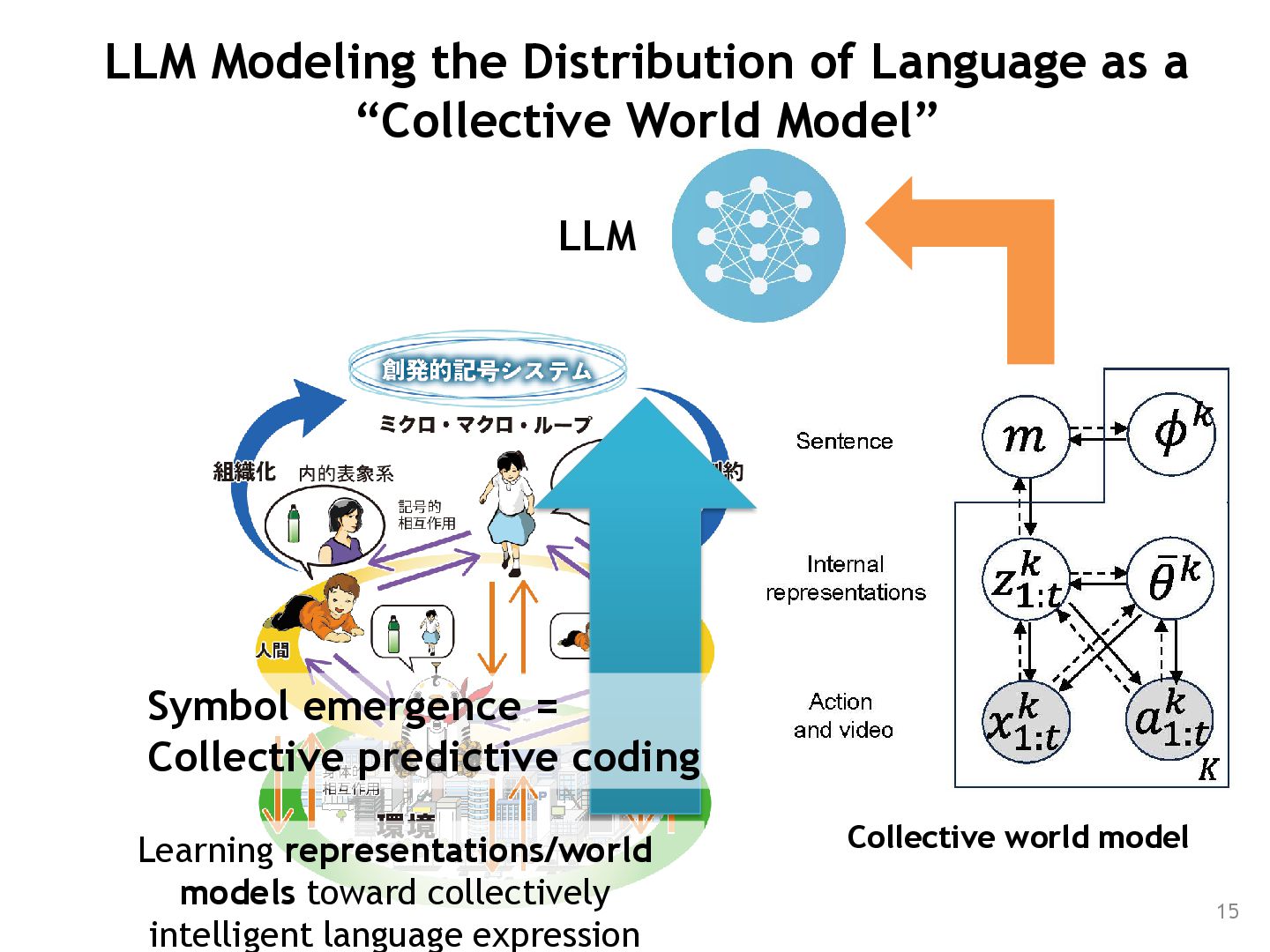
Taniguchi, T., Ueda, R., Nakamura, T., Suzuki, M., & Taniguchi, A. (2024). Generative Emergent Communication: Large Language Model is a Collective World Model. arXiv preprint arXiv:2501.00226.
https://arxiv.org/abs/2501.00226
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Symbol emergence systems [Taniguchi+ 2016] Tadahiro Taniguchi, Takayuki Nagai, Tomoaki](https://files.speakerdeck.com/presentations/0cf1e9aaca1a465ea93c2eeb0f7a8e24/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
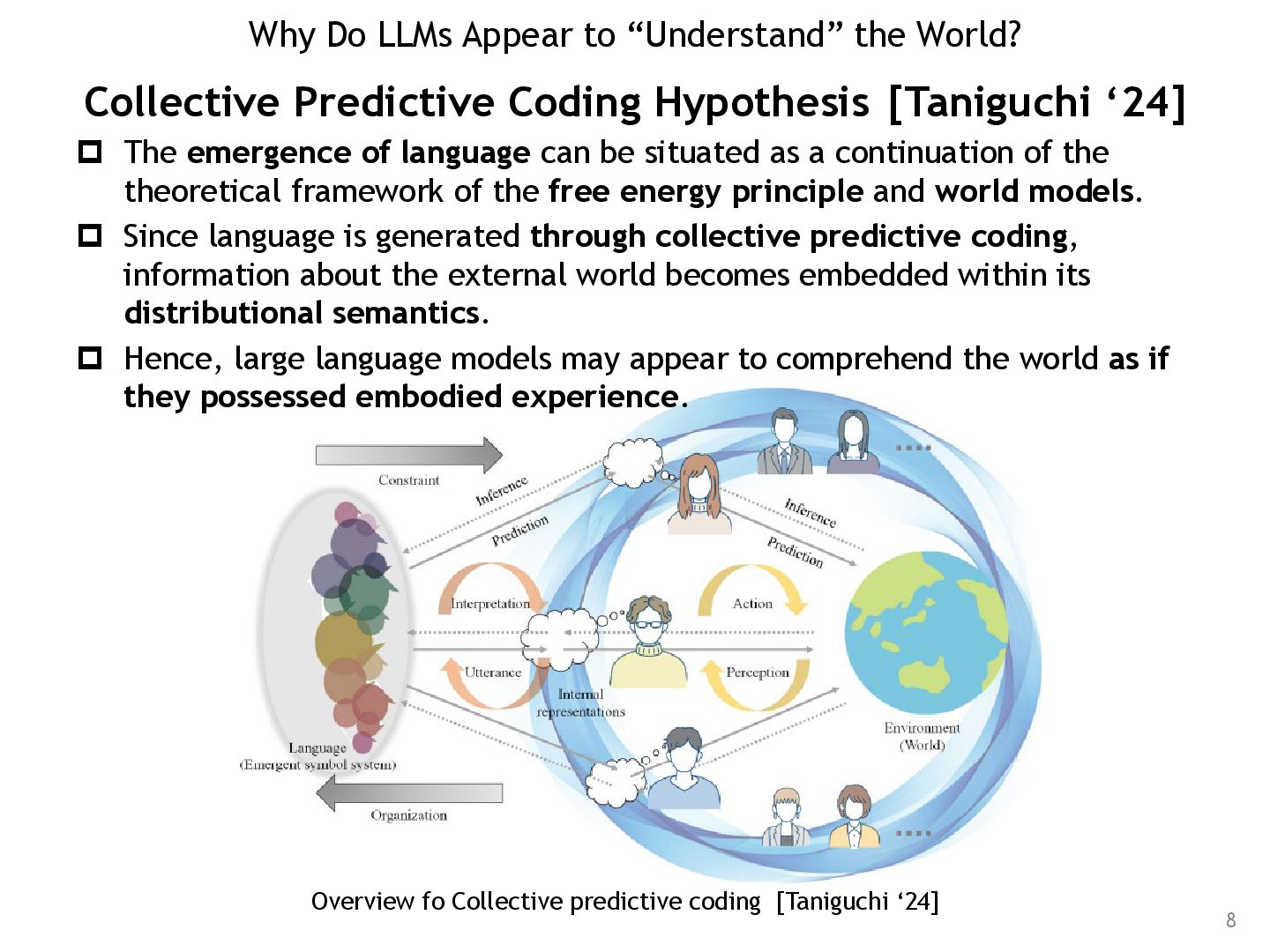
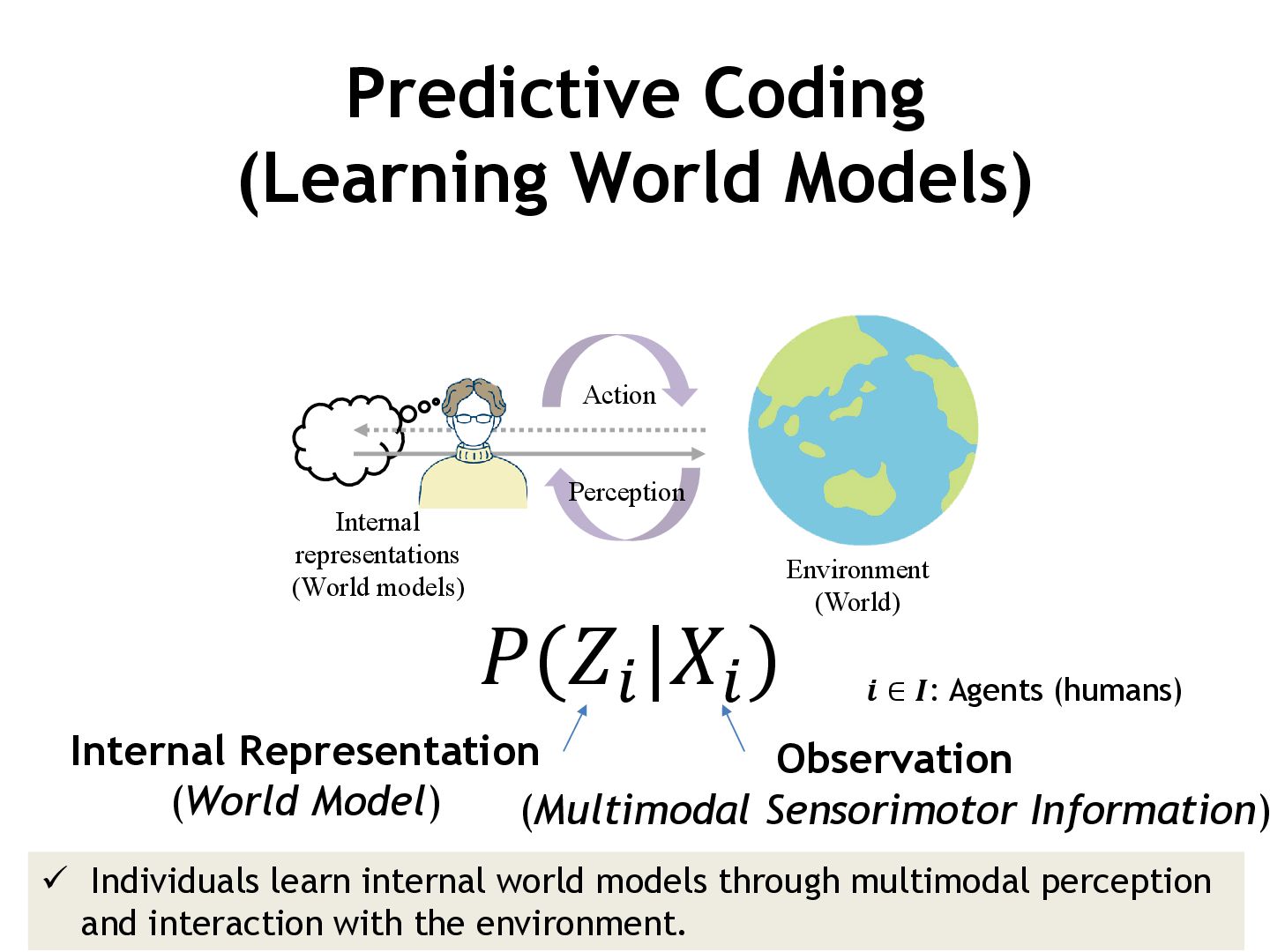
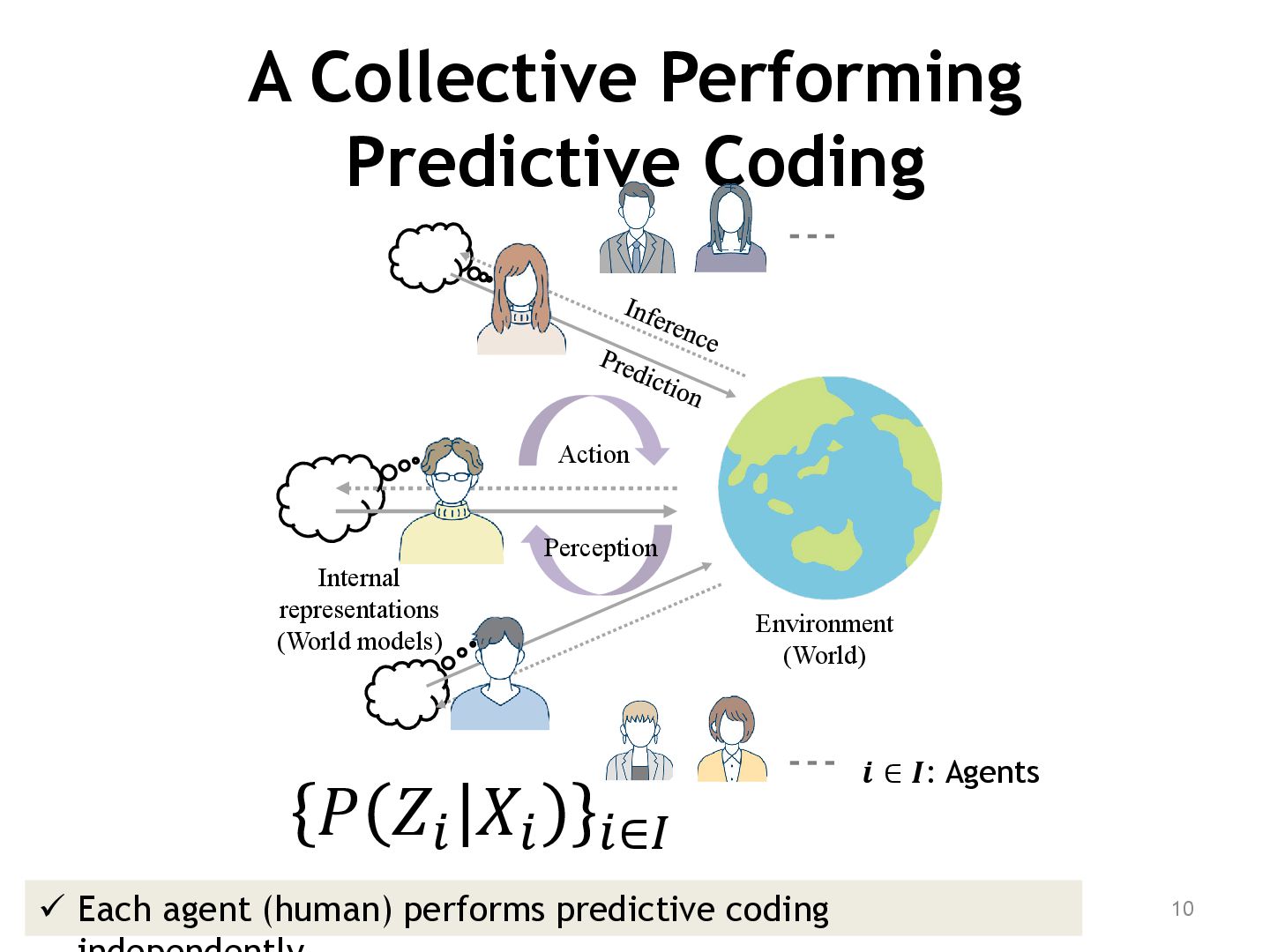
![Collective Predictive Coding [Taniguchi ‘24] Action Perception Internal representations (World](https://files.speakerdeck.com/presentations/0cf1e9aaca1a465ea93c2eeb0f7a8e24/slide_10.jpg){kind=link}
{kind=link}
![Bayesian Integration of Multiple VLMs via Captioning Game [Matsui+ 2025]](https://files.speakerdeck.com/presentations/0cf1e9aaca1a465ea93c2eeb0f7a8e24/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}