NeurIPS, 1999. [Swaminathan&Joachims,16] Adith Swaminathan and Thorsten Joachims. Batch learning from logged bandit feedback through counterfactual risk minimization. JMLR, 2016. [Dudík+,11] Miroslav Dudík, John Langford, and Lihong Li. Doubly robust policy evaluation and learning. ICML, 2011. [Saito+,24] Yuta Saito, Jihan Yao, and Thorsten Joachims. Potec: Off-policy learning for large action spaces via two-stage policy decomposition. 2024. [Brown+,20] Tom Brown, Benjamin Mann, Nick Ryder, Melanie Subbiah, Jared Kaplan, Prafulla Dhariwal, Arvind Neelakantan, Pranav Shyam, Girish Sastry, Amanda Askell, Sandhini Agarwal, Ariel Herbert-Voss, Gretchen Krueger, Tom Henighan, Rewon Child, Aditya Ramesh, Daniel M. Ziegler, Jeffrey Wu, Clemens Winter, Christopher Hesse, Mark Chen, Eric Sigler, Mateusz Litwin, Scott Gray, Benjamin Chess, Jack Clark, Christopher Berner, Sam McCandlish, Alec Radford, Ilya Sutskever, and Dario Amodei. Language models are few-shot learners. NeurIPS, 2020. September 2025 OPL for prompt-guided language generation 51
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
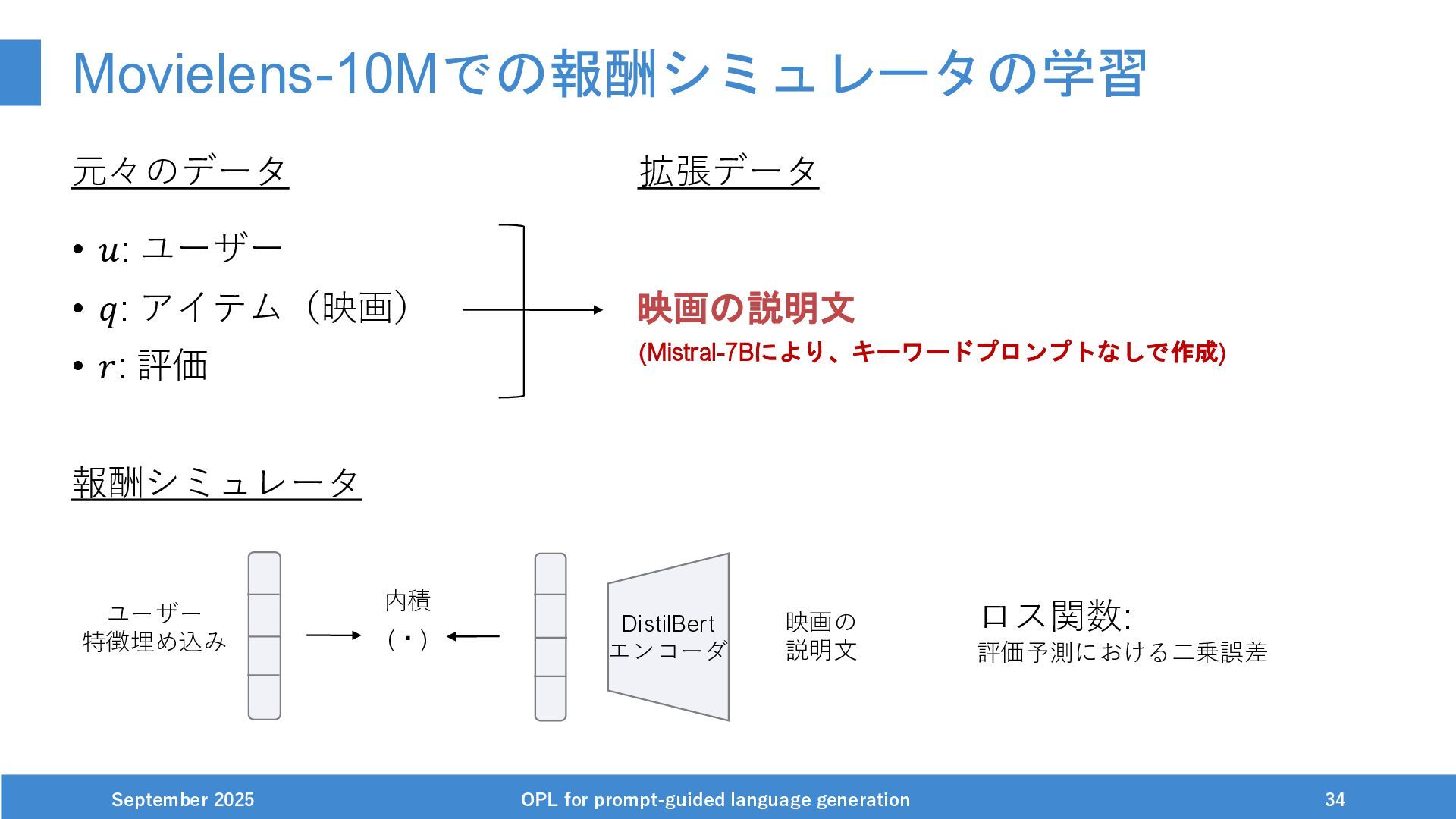
![LLMを使った実験 • MovieLens-10M [Harper&Konstan,15] を基にした実験 • DistilBert [Sanh+,19] ベースの報酬シミュレータ を学習](https://files.speakerdeck.com/presentations/b8b1a52a01de41659cea42678d28dddd/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![既存手法: DR推定量 [Dudík+,11] September 2025 OPL for prompt-guided language generation](https://files.speakerdeck.com/presentations/b8b1a52a01de41659cea42678d28dddd/slide_43.jpg){kind=link}
![既存手法: POTEC [Saito+,24] POTECはプロンプトのクラスタリングを利用した2段階の方策最適化を行う。 September 2025 OPL for prompt-guided language](https://files.speakerdeck.com/presentations/b8b1a52a01de41659cea42678d28dddd/slide_44.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![参考文献 (1/2) [Konda&Tsitsiklis,99] Vijay Konda and John Tsitsiklis. Actor-critic algorithms.](https://files.speakerdeck.com/presentations/b8b1a52a01de41659cea42678d28dddd/slide_48.jpg){kind=link}
![参考文献 (2/2) [Jiang+,23] Albert Q Jiang, Alexandre Sablayrolles, Arthur Mensch,](https://files.speakerdeck.com/presentations/b8b1a52a01de41659cea42678d28dddd/slide_49.jpg){kind=link}