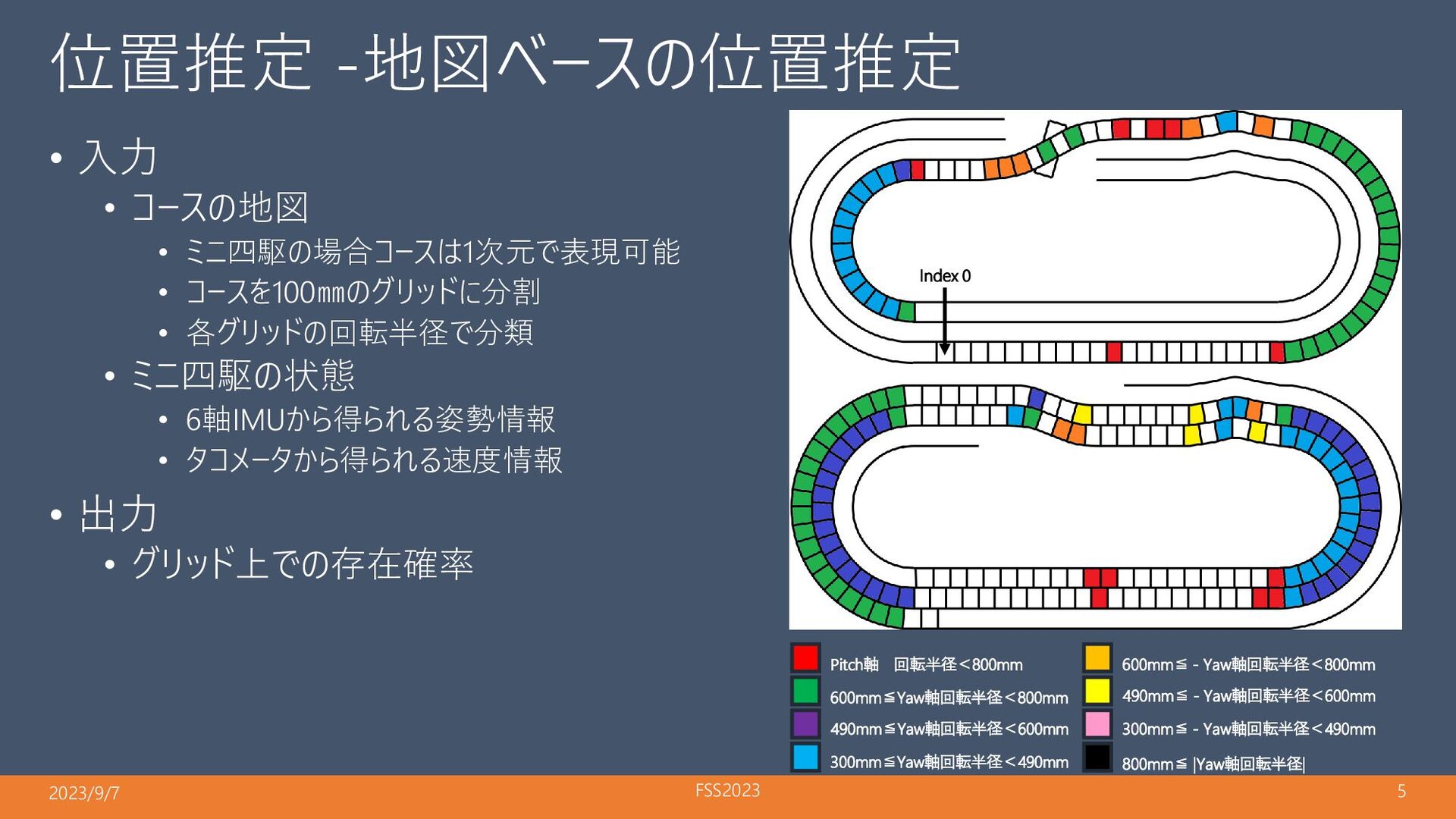
• 各グリッドの回転半径で分類 • ミニ四駆の状態 • 6軸IMUから得られる姿勢情報 • タコメータから得られる速度情報 • 出力 • グリッド上での存在確率 Index 0 Pitch軸 回転半径<800mm 600mm≦Yaw軸回転半径<800mm 490mm≦Yaw軸回転半径<600mm 300mm≦Yaw軸回転半径<490mm 600mm≦ - Yaw軸回転半径<800mm 490mm≦ - Yaw軸回転半径<600mm 300mm≦ - Yaw軸回転半径<490mm 800mm≦ |Yaw軸回転半径| 2023/9/7 FSS2023 5
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
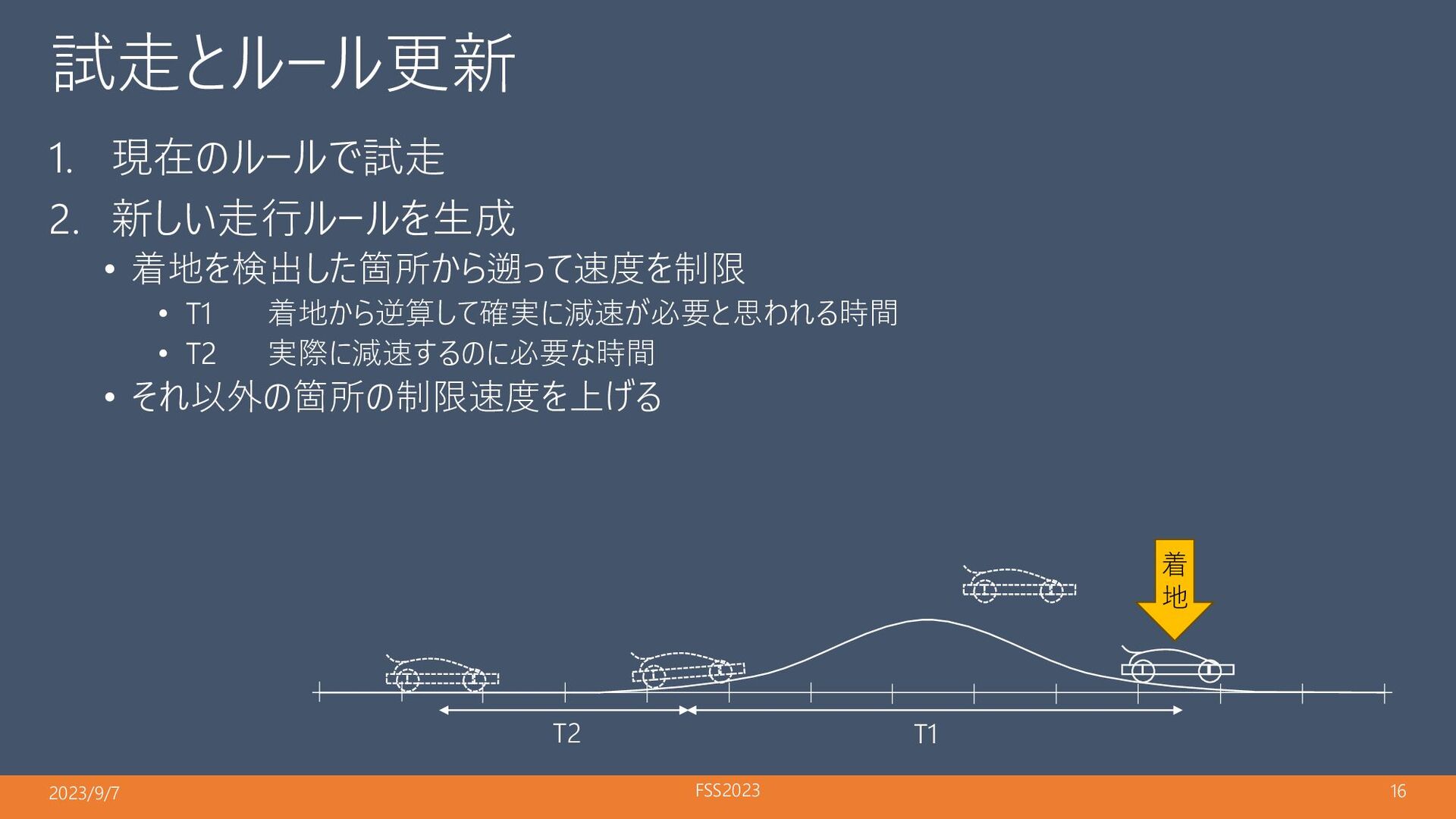
![獲得したルール • 更新条件 • T1=0.4[sec], T2=0.2[sec] • 1試走毎の制限速度上昇量2km/h • 更新結果](https://files.speakerdeck.com/presentations/9b5fe2f1f6844ad7a991f17979dbb605/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}