Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
自己位置推定精度向上のためのセンサ情報補正
Search
aks3g
September 03, 2024
93
0
Share
自己位置推定精度向上のためのセンサ情報補正
FSS2024で発表したスライドを少し修正したものです。
aks3g
September 03, 2024
More Decks by aks3g
See All by aks3g
ミニ四駆AI用制御装置の事例紹介
aks3g
0
470
Featured
See All Featured
So, you think you're a good person
axbom
PRO
2
2k
The agentic SEO stack - context over prompts
schlessera
0
790
Done Done
chrislema
186
16k
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
270
SEOcharity - Dark patterns in SEO and UX: How to avoid them and build a more ethical web
sarafernandez
0
200
How to Think Like a Performance Engineer
csswizardry
28
2.6k
Building Experiences: Design Systems, User Experience, and Full Site Editing
marktimemedia
0
520
Highjacked: Video Game Concept Design
rkendrick25
PRO
1
380
Navigating the moral maze — ethical principles for Al-driven product design
skipperchong
2
380
Code Reviewing Like a Champion
maltzj
528
40k
Un-Boring Meetings
codingconduct
0
310
A Guide to Academic Writing Using Generative AI - A Workshop
ks91
PRO
1
320
Transcript
自己位置推定精度向上の ためのセンサ情報補正 赤坂清隆 2024/9/4 FSS2024 1
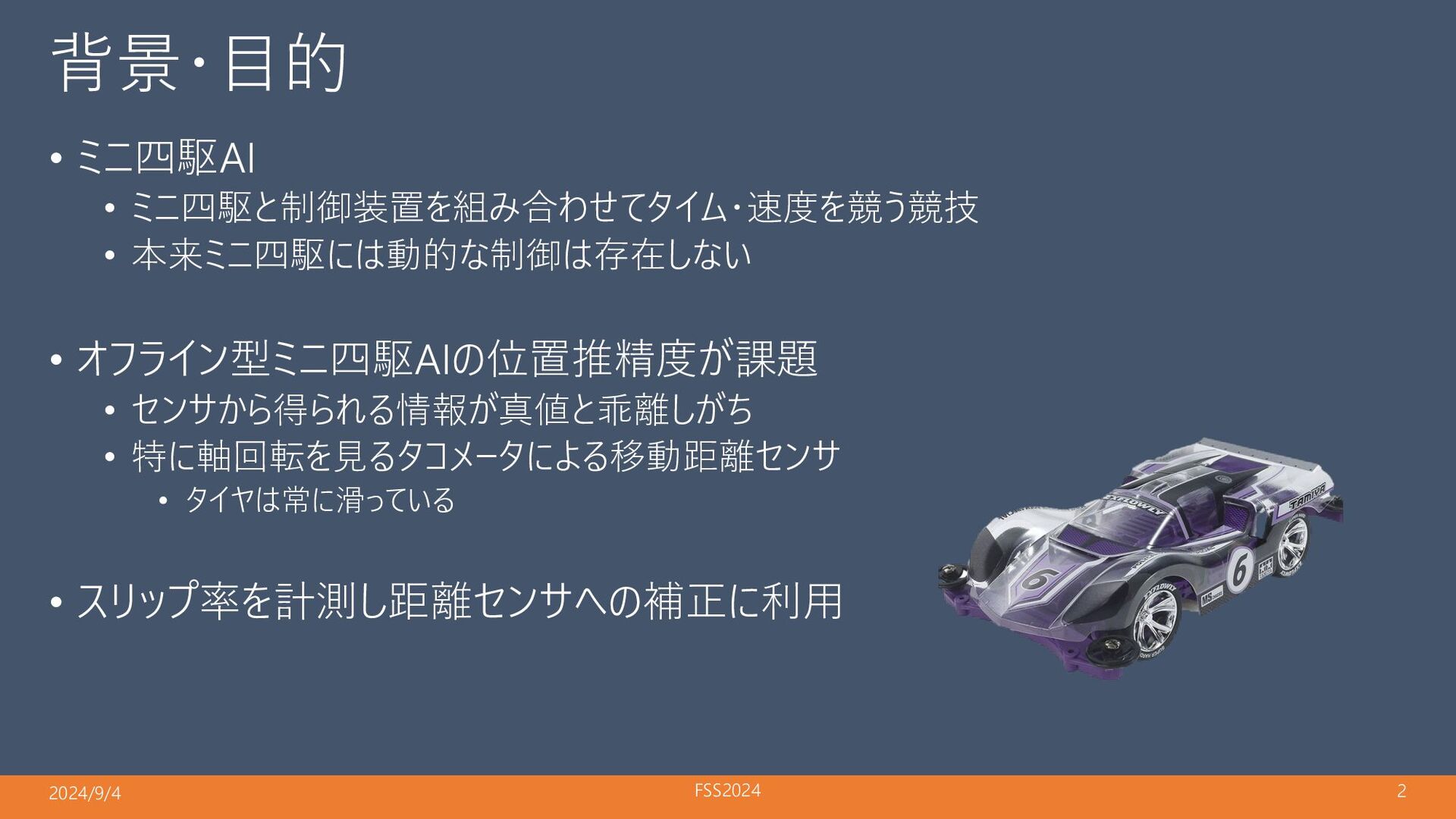
背景・目的 • ミニ四駆AI • ミニ四駆と制御装置を組み合わせてタイム・速度を競う競技 • 本来ミニ四駆には動的な制御は存在しない • オフライン型ミニ四駆AIの位置推精度が課題 •
センサから得られる情報が真値と乖離しがち • 特に軸回転を見るタコメータによる移動距離センサ • タイヤは常に滑っている • スリップ率を計測し距離センサへの補正に利用 2024/9/4 FSS2024 2
スリップ率の計測 2024/9/4 FSS2024 3
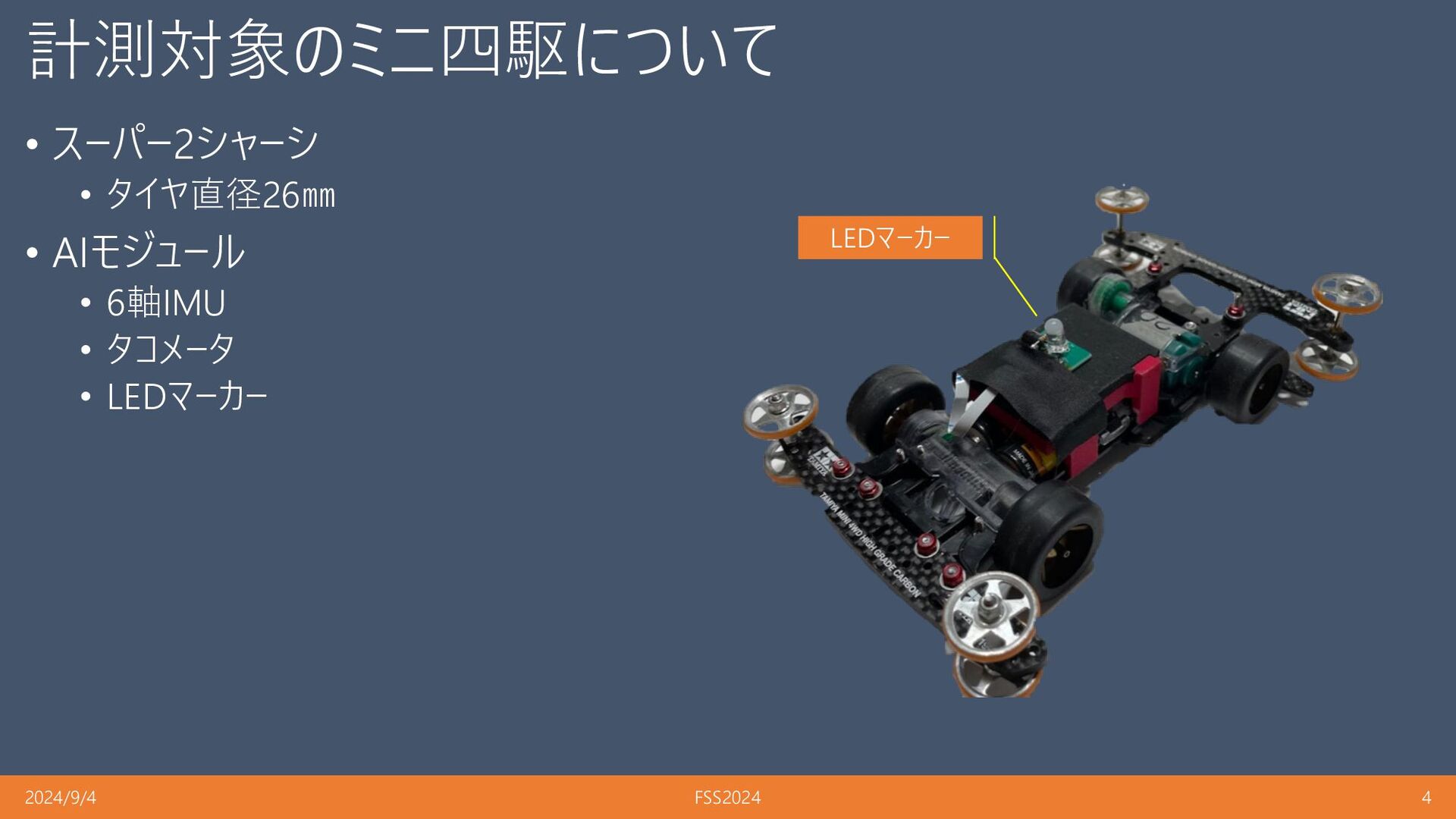
計測対象のミニ四駆について • スーパー2シャーシ • タイヤ直径26㎜ • AIモジュール • 6軸IMU •
タコメータ • LEDマーカー 2024/9/4 FSS2024 4 LEDマーカー
画像を用いたスリップ率の計測 1. ミニ四駆AI側で定期的にマーカーをOn/Off 2. カメラを用いてコース全体を撮影 3. マーカーOn状態で移動した距離を取得 • カメラ映像からの移動距離(真値) •
センサ情報からの移動距離(オフライン情報) 4. 得られた真値とオフライン情報からスリップ率を計測 2024/9/4 FSS2024 5
カメラ映像からの移動距離(真値)測定 2024/9/4 FSS2024 6 1. 複数画像のピーク輝度を合成する事でLEDの軌跡を取得 2. 軌跡から移動距離を計測 215.177[mm]
センサ情報との比較(ストレートセクション) • スリップ率=真の移動距離/観測移動距離 • 実験結果 • 画像から得られた移動距離=215.177[mm] • センサから得られた移動距離=224.914[mm] •
スリップ率=215.177/224.914 = 0.9567 2024/9/4 FSS2024 7 メモ:業界的には 観測移動距離/真の移動距離 をスリップ率とするらしい
センサ情報との比較(コーナーセクション) • 旋回半径の比を利用 • 円弧上の移動距離[mm] = 2x半径x回転角度[radians] • ミニ四駆の性質上ストレートとは異なる関係性になるのでは(仮説) 2024/9/4
FSS2024 8
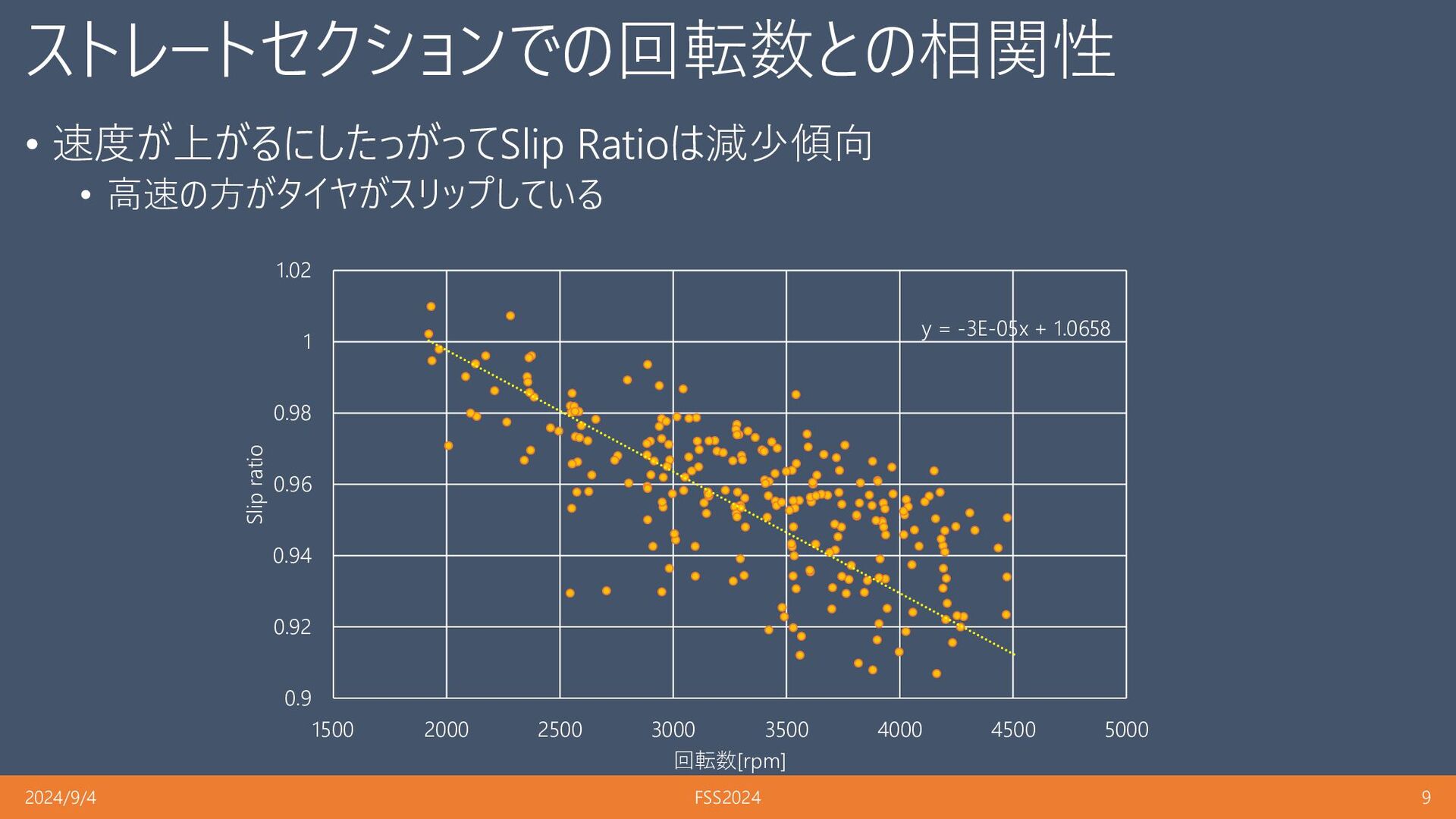
ストレートセクションでの回転数との相関性 • 速度が上がるにしたっがってSlip Ratioは減少傾向 • 高速の方がタイヤがスリップしている 2024/9/4 FSS2024 9 y
= -3E-05x + 1.0658 0.9 0.92 0.94 0.96 0.98 1 1.02 1500 2000 2500 3000 3500 4000 4500 5000 Slip ratio 回転数[rpm]
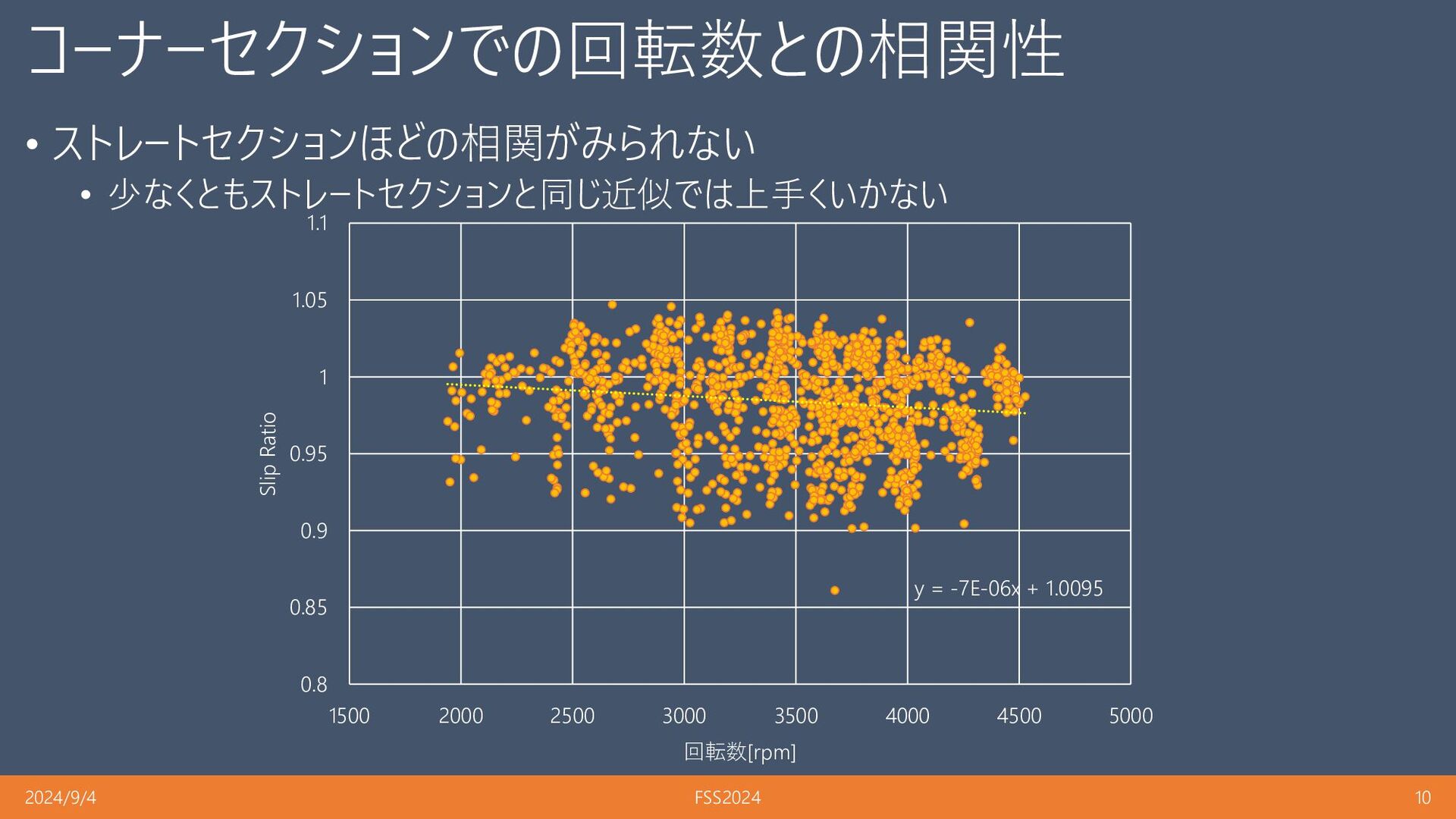
コーナーセクションでの回転数との相関性 • ストレートセクションほどの相関がみられない • 少なくともストレートセクションと同じ近似では上手くいかない 2024/9/4 FSS2024 10 y =
-7E-06x + 1.0095 0.8 0.85 0.9 0.95 1 1.05 1.1 1500 2000 2500 3000 3500 4000 4500 5000 Slip Ratio 回転数[rpm]
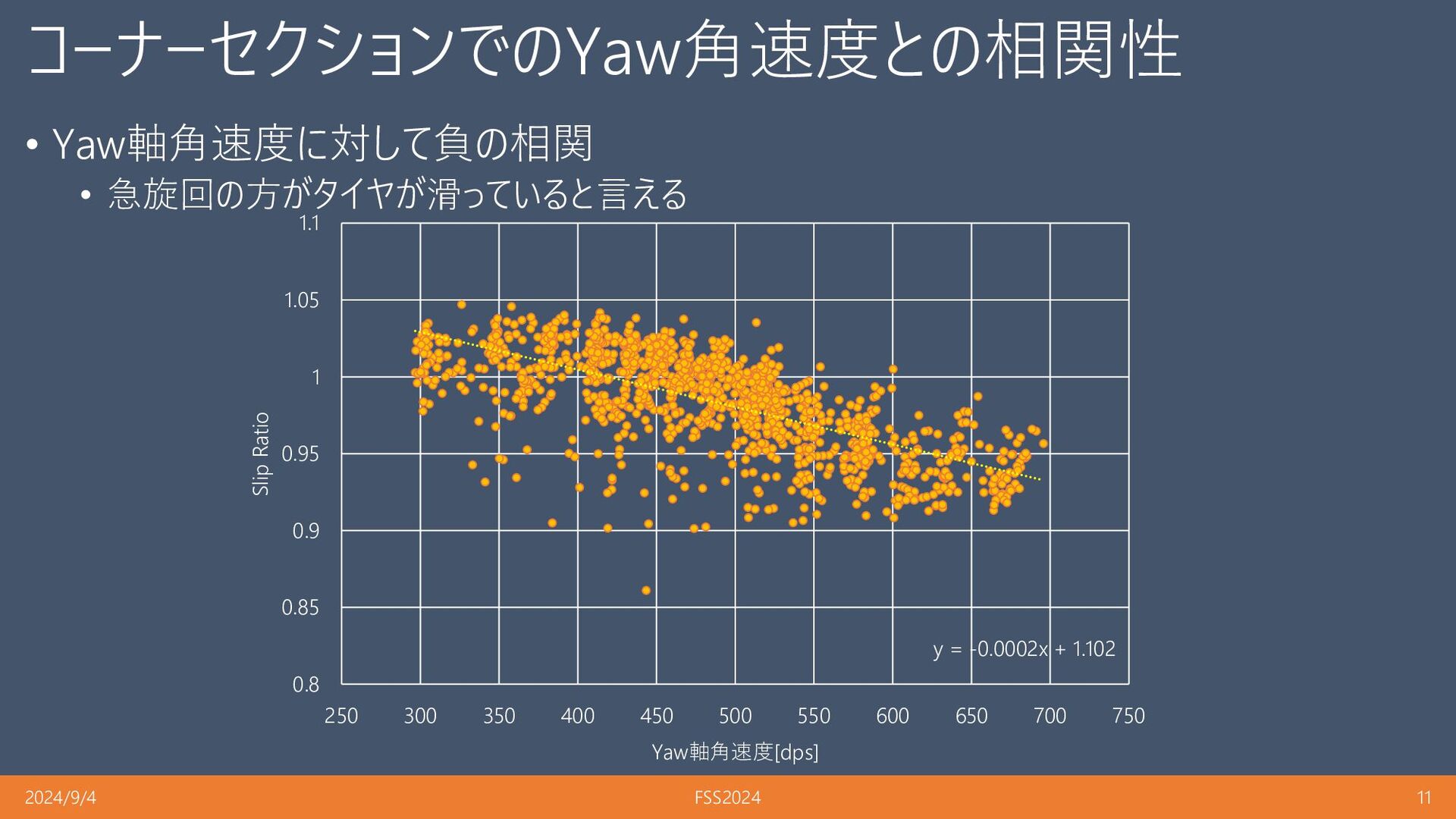
コーナーセクションでのYaw角速度との相関性 • Yaw軸角速度に対して負の相関 • 急旋回の方がタイヤが滑っていると言える 2024/9/4 FSS2024 11 y =
-0.0002x + 1.102 0.8 0.85 0.9 0.95 1 1.05 1.1 250 300 350 400 450 500 550 600 650 700 750 Slip Ratio Yaw軸角速度[dps]
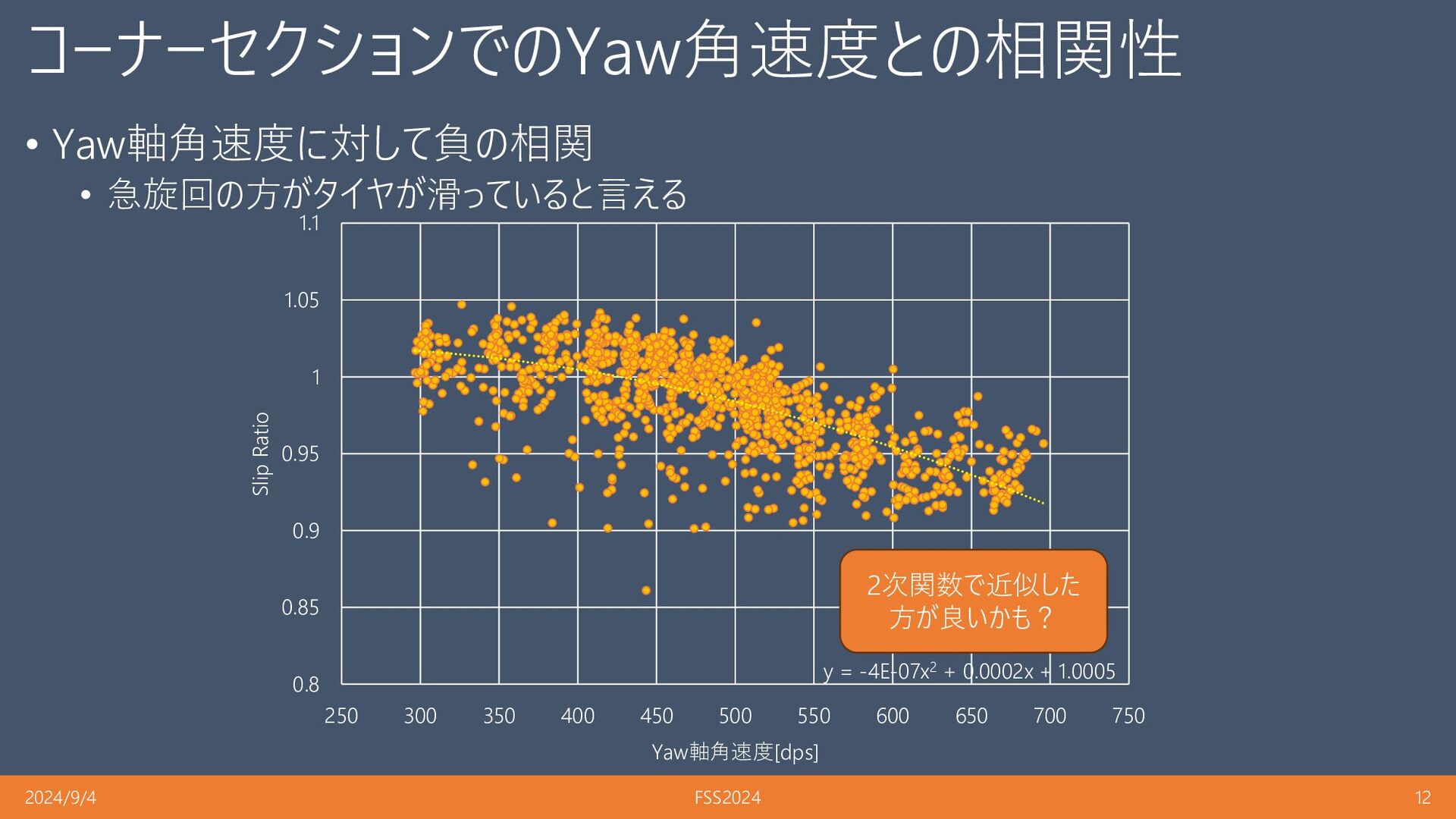
コーナーセクションでのYaw角速度との相関性 • Yaw軸角速度に対して負の相関 • 急旋回の方がタイヤが滑っていると言える 2024/9/4 FSS2024 12 y =
-4E-07x2 + 0.0002x + 1.0005 0.8 0.85 0.9 0.95 1 1.05 1.1 250 300 350 400 450 500 550 600 650 700 750 Slip Ratio Yaw軸角速度[dps] 2次関数で近似した 方が良いかも?
位置推定への影響検討 2024/9/4 FSS2024 13
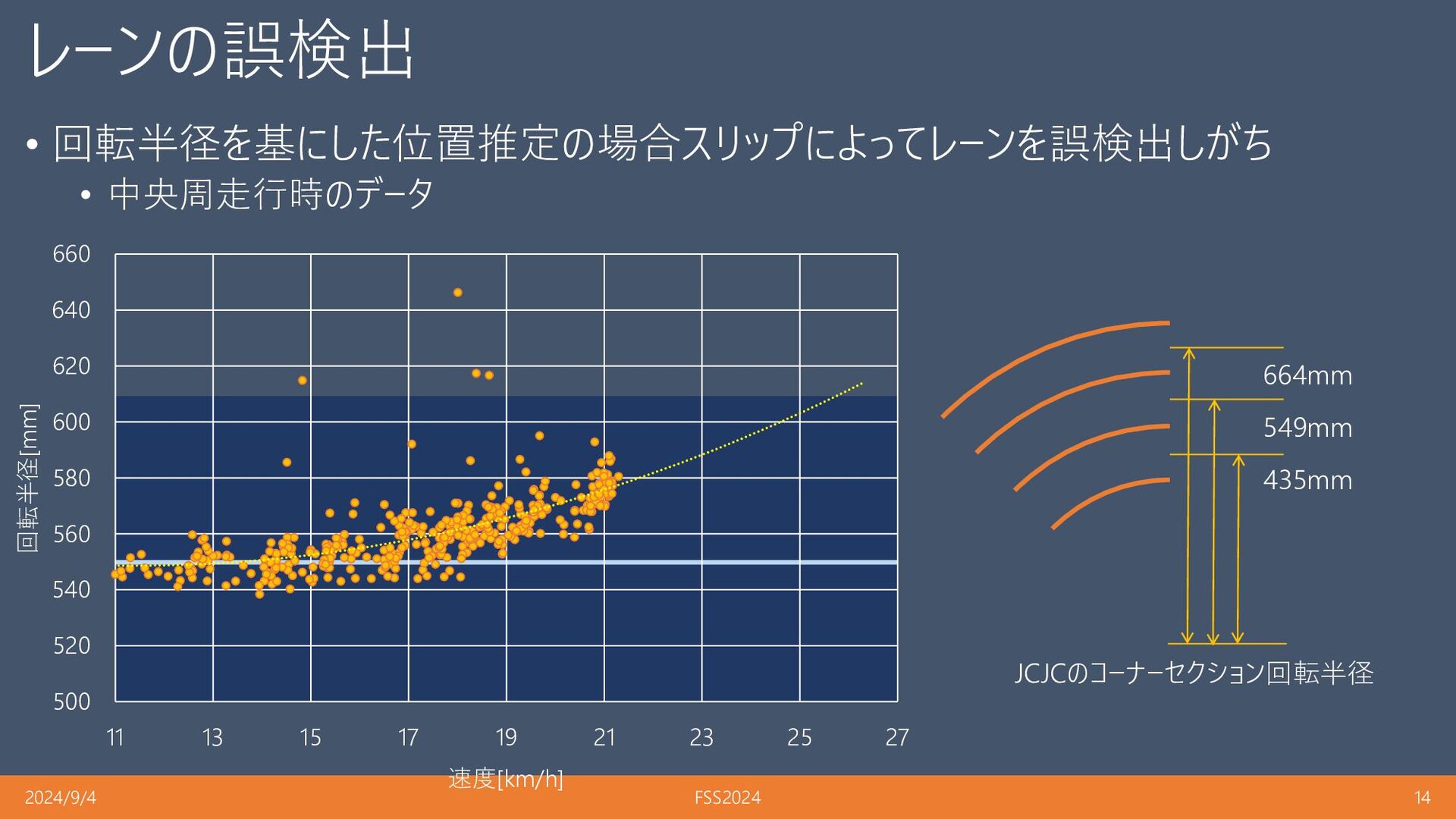
レーンの誤検出 • 回転半径を基にした位置推定の場合スリップによってレーンを誤検出しがち • 中央周走行時のデータ 2024/9/4 FSS2024 14 500 520
540 560 580 600 620 640 660 11 13 15 17 19 21 23 25 27 回転半径[mm] 速度[km/h] 664mm 549mm 435mm JCJCのコーナーセクション回転半径
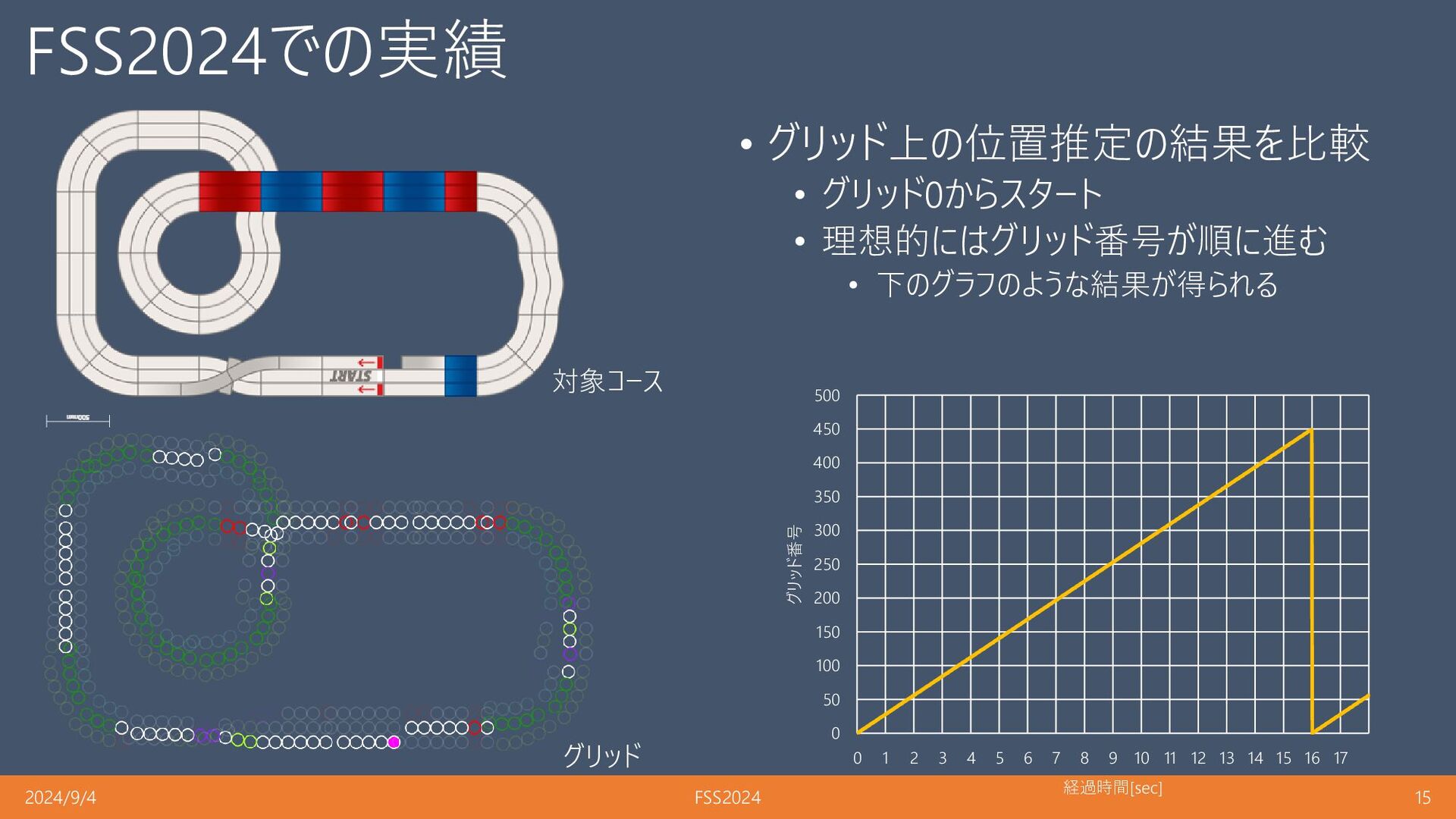
FSS2024での実績 2024/9/4 FSS2024 15 0 50 100 150 200 250
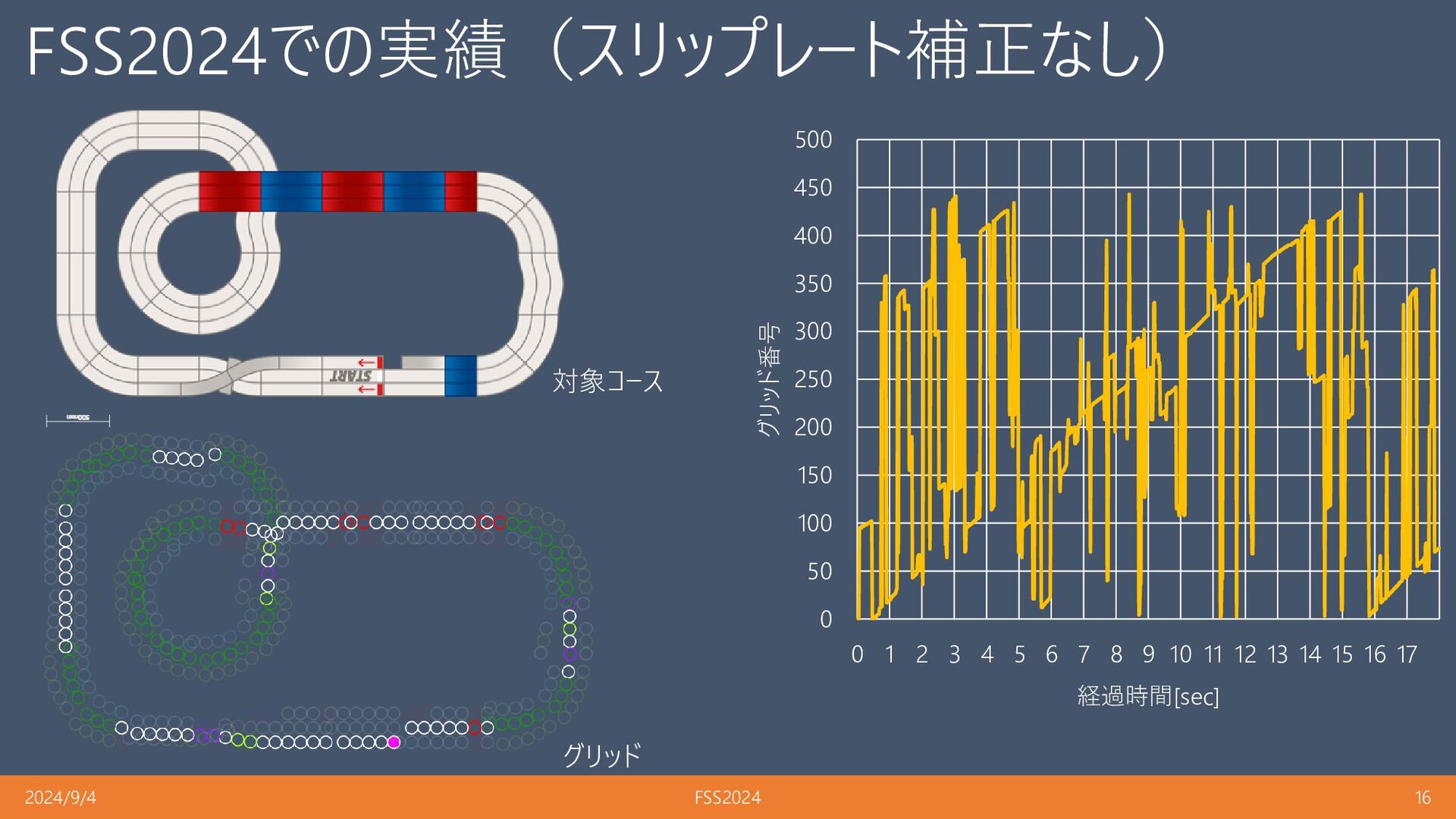
300 350 400 450 500 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 グリッド番号 経過時間[sec] • グリッド上の位置推定の結果を比較 • グリッド0からスタート • 理想的にはグリッド番号が順に進む • 下のグラフのような結果が得られる 対象コース グリッド
FSS2024での実績(スリップレート補正なし) 2024/9/4 FSS2024 16 0 50 100 150 200 250
300 350 400 450 500 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 グリッド番号 経過時間[sec] 対象コース グリッド
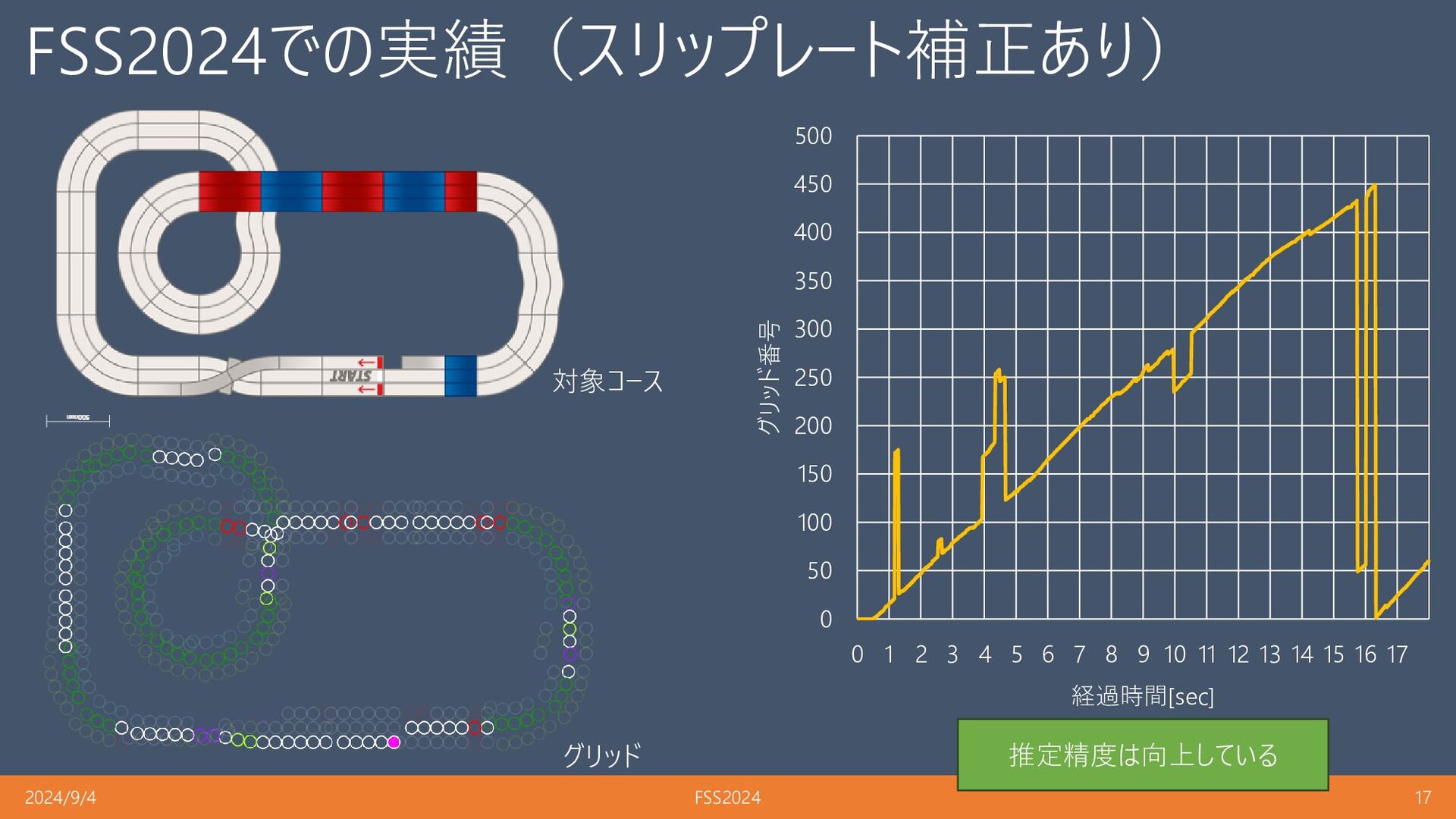
FSS2024での実績(スリップレート補正あり) 2024/9/4 FSS2024 17 0 50 100 150 200 250
300 350 400 450 500 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 グリッド番号 経過時間[sec] 対象コース グリッド 推定精度は向上している
スリップ率の計測容易化について 2024/9/4 FSS2024 18
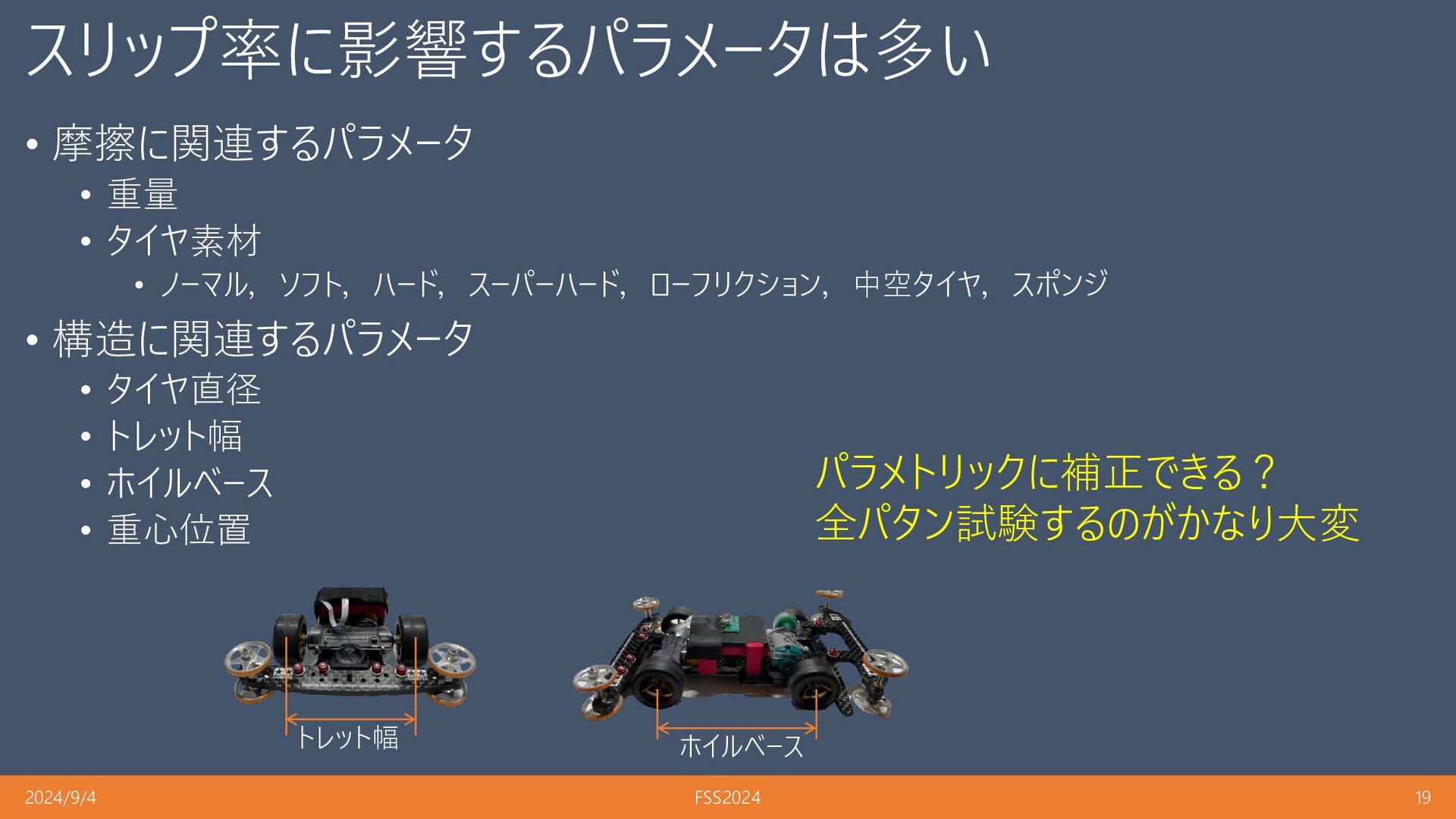
スリップ率に影響するパラメータは多い • 摩擦に関連するパラメータ • 重量 • タイヤ素材 • ノーマル,ソフト,ハード,スーパーハード,ローフリクション,中空タイヤ,スポンジ •
構造に関連するパラメータ • タイヤ直径 • トレット幅 • ホイルベース • 重心位置 2024/9/4 FSS2024 19 トレット幅 ホイルベース パラメトリックに補正できる? 全パタン試験するのがかなり大変
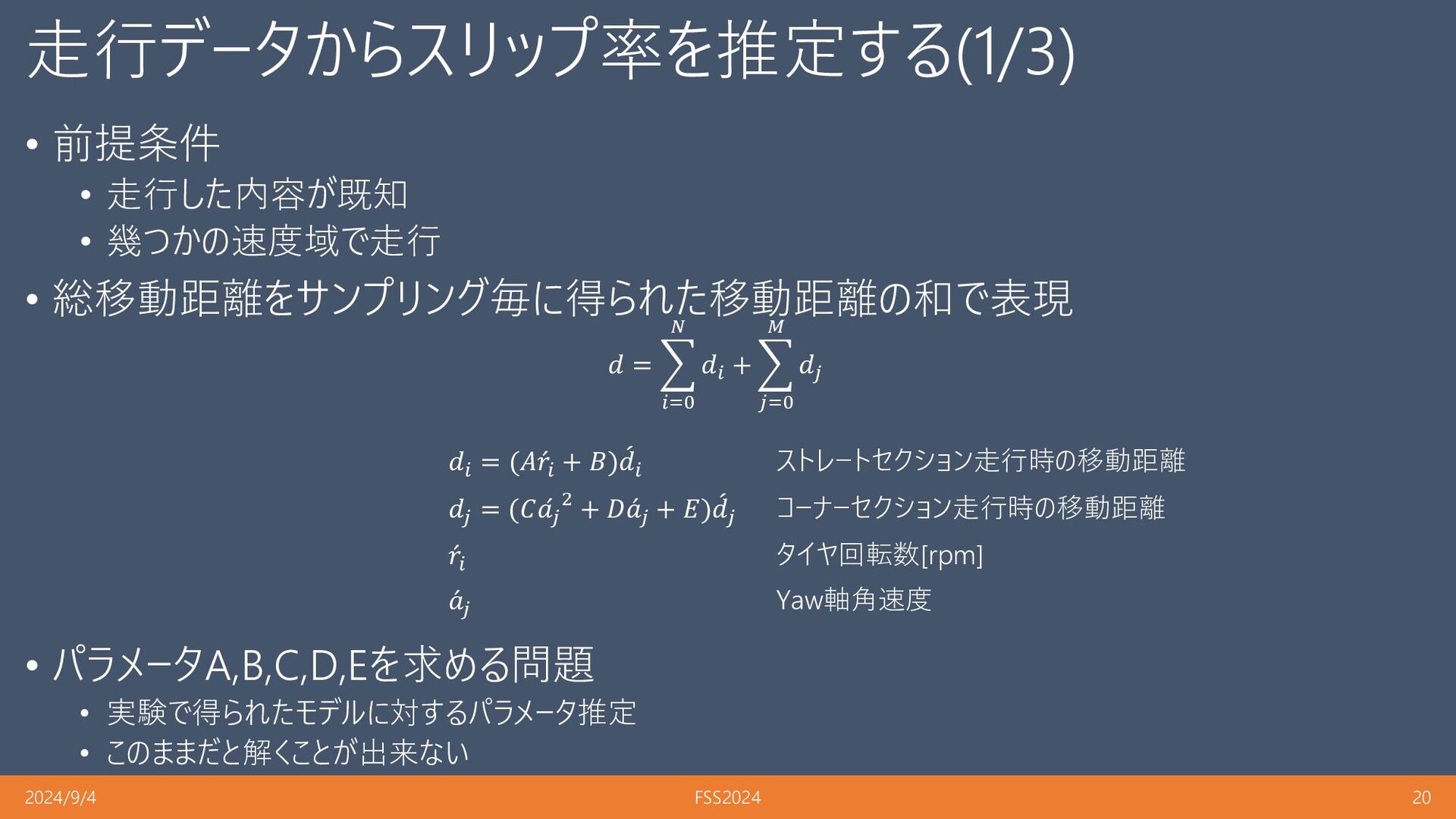
走行データからスリップ率を推定する(1/3) • 前提条件 • 走行した内容が既知 • 幾つかの速度域で走行 • 総移動距離をサンプリング毎に得られた移動距離の和で表現 •
パラメータA,B,C,D,Eを求める問題 • 実験で得られたモデルに対するパラメータ推定 • このままだと解くことが出来ない 2024/9/4 FSS2024 20 𝑑 = 𝑖=0 𝑁 𝑑𝑖 + 𝑗=0 𝑀 𝑑𝑗 𝑑𝑖 = (𝐴 ƴ 𝑟𝑖 + 𝐵) ሖ 𝑑𝑖 ストレートセクション走行時の移動距離 𝑑𝑗 = (𝐶 ƴ 𝑎𝑗 2 + 𝐷 ƴ 𝑎𝑗 + 𝐸) ሖ 𝑑𝑗 コーナーセクション走行時の移動距離 ƴ 𝑎𝑗 Yaw軸角速度 ƴ 𝑟𝑖 タイヤ回転数[rpm]
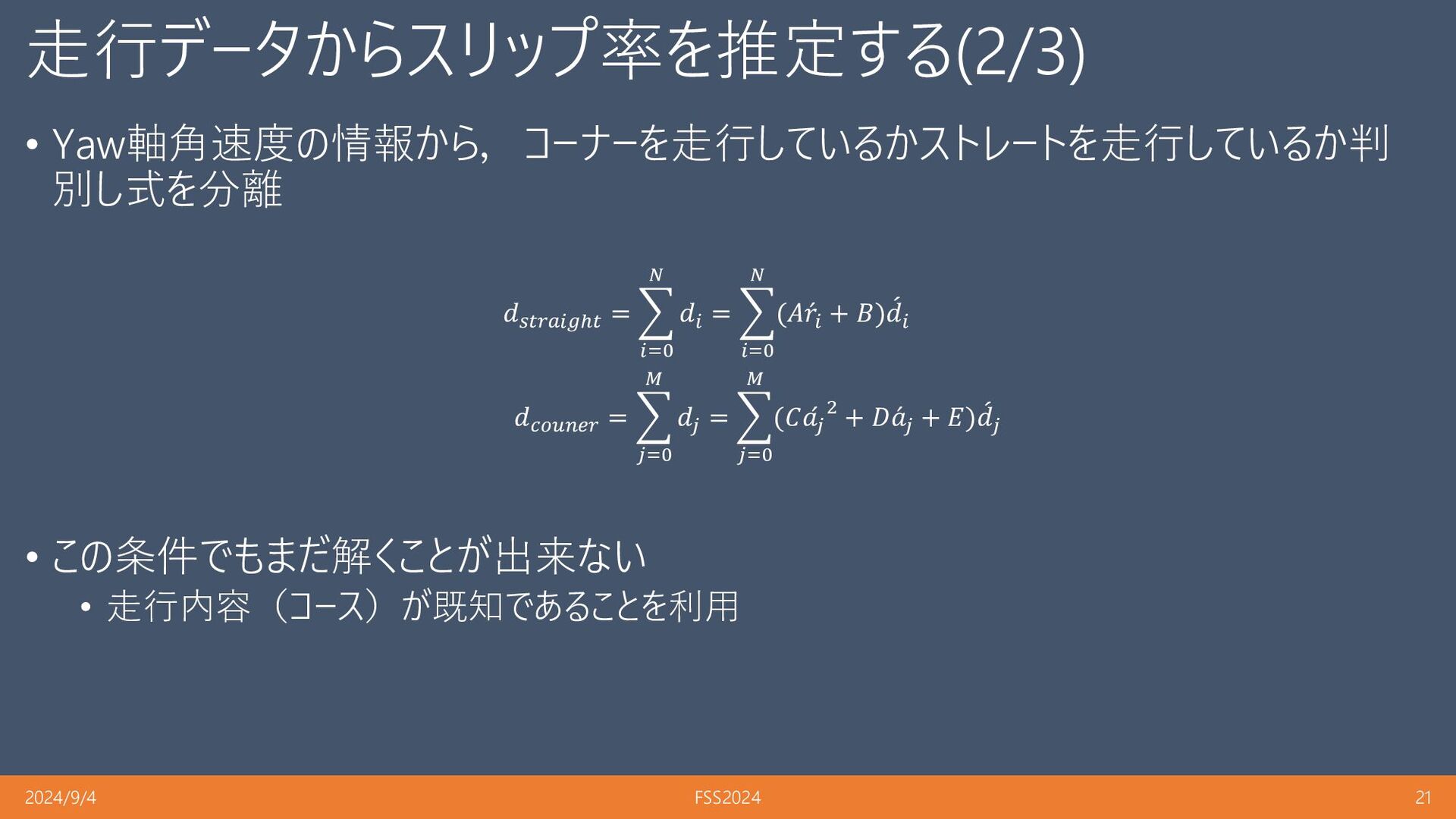
走行データからスリップ率を推定する(2/3) • Yaw軸角速度の情報から,コーナーを走行しているかストレートを走行しているか判 別し式を分離 • この条件でもまだ解くことが出来ない • 走行内容(コース)が既知であることを利用 2024/9/4 FSS2024
21 𝑑𝑠𝑡𝑟𝑎𝑖𝑔ℎ𝑡 = 𝑖=0 𝑁 𝑑𝑖 = 𝑖=0 𝑁 (𝐴 ƴ 𝑟𝑖 + 𝐵) ሖ 𝑑𝑖 𝑑𝑐𝑜𝑢𝑛𝑒𝑟 = 𝑗=0 𝑀 𝑑𝑗 = 𝑗=0 𝑀 (𝐶 ƴ 𝑎𝑗 2 + 𝐷 ƴ 𝑎𝑗 + 𝐸) ሖ 𝑑𝑗
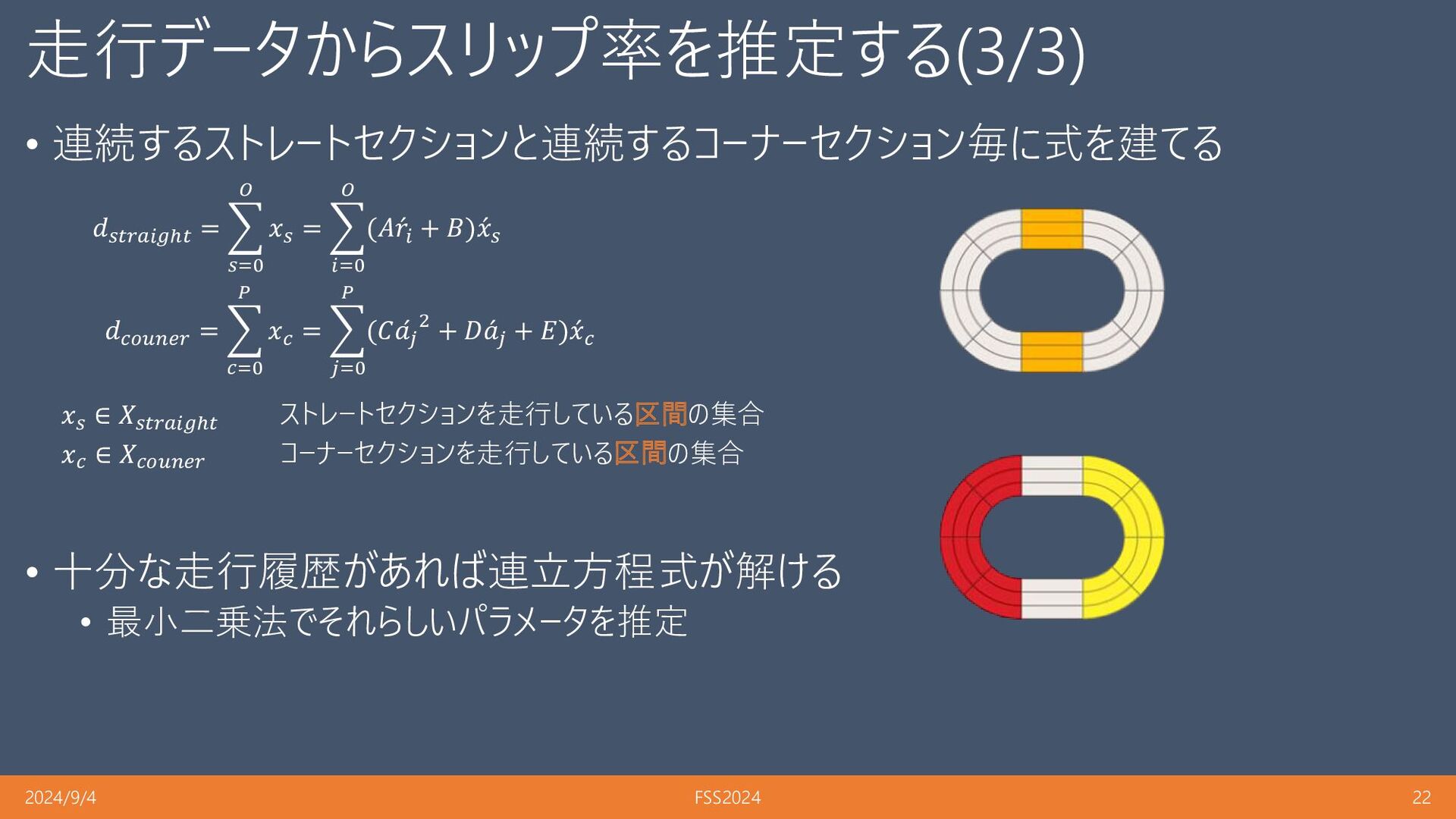
走行データからスリップ率を推定する(3/3) • 連続するストレートセクションと連続するコーナーセクション毎に式を建てる • 十分な走行履歴があれば連立方程式が解ける • 最小二乗法でそれらしいパラメータを推定 2024/9/4 FSS2024 22
𝑑𝑠𝑡𝑟𝑎𝑖𝑔ℎ𝑡 = 𝑠=0 𝑂 𝑥𝑠 = 𝑖=0 𝑂 (𝐴 ƴ 𝑟𝑖 + 𝐵) ƴ 𝑥𝑠 𝑑𝑐𝑜𝑢𝑛𝑒𝑟 = 𝑐=0 𝑃 𝑥𝑐 = 𝑗=0 𝑃 (𝐶 ƴ 𝑎𝑗 2 + 𝐷 ƴ 𝑎𝑗 + 𝐸) ƴ 𝑥𝑐 𝑥𝑠 ∈ 𝑋𝑠𝑡𝑟𝑎𝑖𝑔ℎ𝑡 ストレートセクションを走行している区間の集合 𝑥𝑐 ∈ 𝑋𝑐𝑜𝑢𝑛𝑒𝑟 コーナーセクションを走行している区間の集合
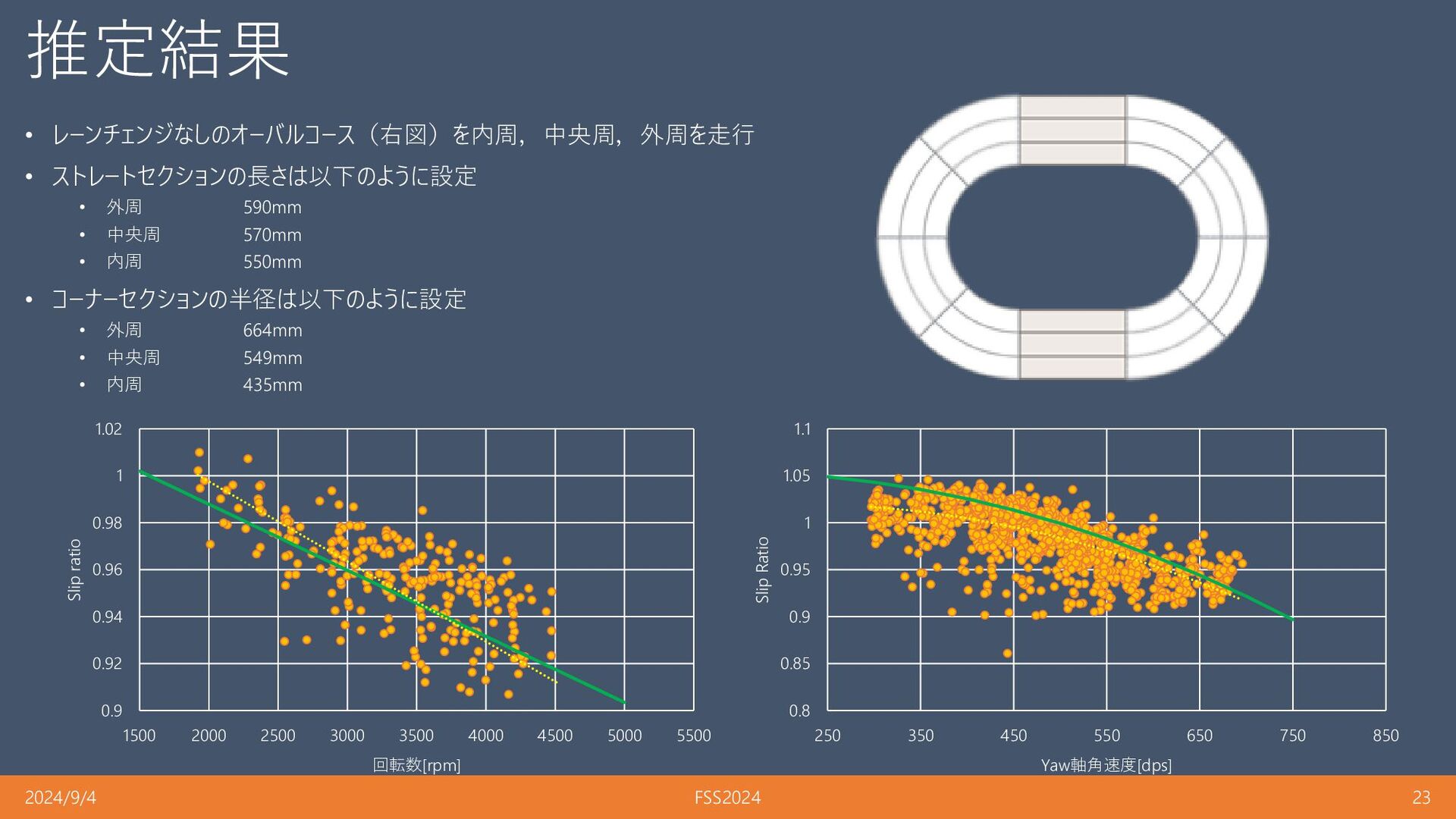
推定結果 • レーンチェンジなしのオーバルコース(右図)を内周,中央周,外周を走行 • ストレートセクションの長さは以下のように設定 • 外周 590mm • 中央周
570mm • 内周 550mm • コーナーセクションの半径は以下のように設定 • 外周 664mm • 中央周 549mm • 内周 435mm 2024/9/4 FSS2024 23 0.9 0.92 0.94 0.96 0.98 1 1.02 1500 2000 2500 3000 3500 4000 4500 5000 5500 Slip ratio 回転数[rpm] 0.8 0.85 0.9 0.95 1 1.05 1.1 250 350 450 550 650 750 850 Slip Ratio Yaw軸角速度[dps]
まとめ • 画像計測による走行距離の実測方法を示した • ミニ四駆のスリップがストレートとコーナーで異なる振る舞いをすることを示した • ストレートは線形近似,コーナーは2次多項式近似で補正をした • モデルがこれで正しいのかは別途調査が必要 •
上記モデルを基に実走行データのみを用いて補正のパラメータを得られることを示した • 事例数が足りていないので追試が必要 • 実ストレート長さについての検討が必要 2024/9/4 FSS2024 24
Appendix 2024/9/4 FSS2024 25
使用機材 2024/9/4 FSS2024 26 • カメラ sony XCU-CG160C • グローバルシャッタ―
• フレームレート 100fps • 解像度 1456x1088 • レンズ
位置推定 2024/9/4 FSS2024 27
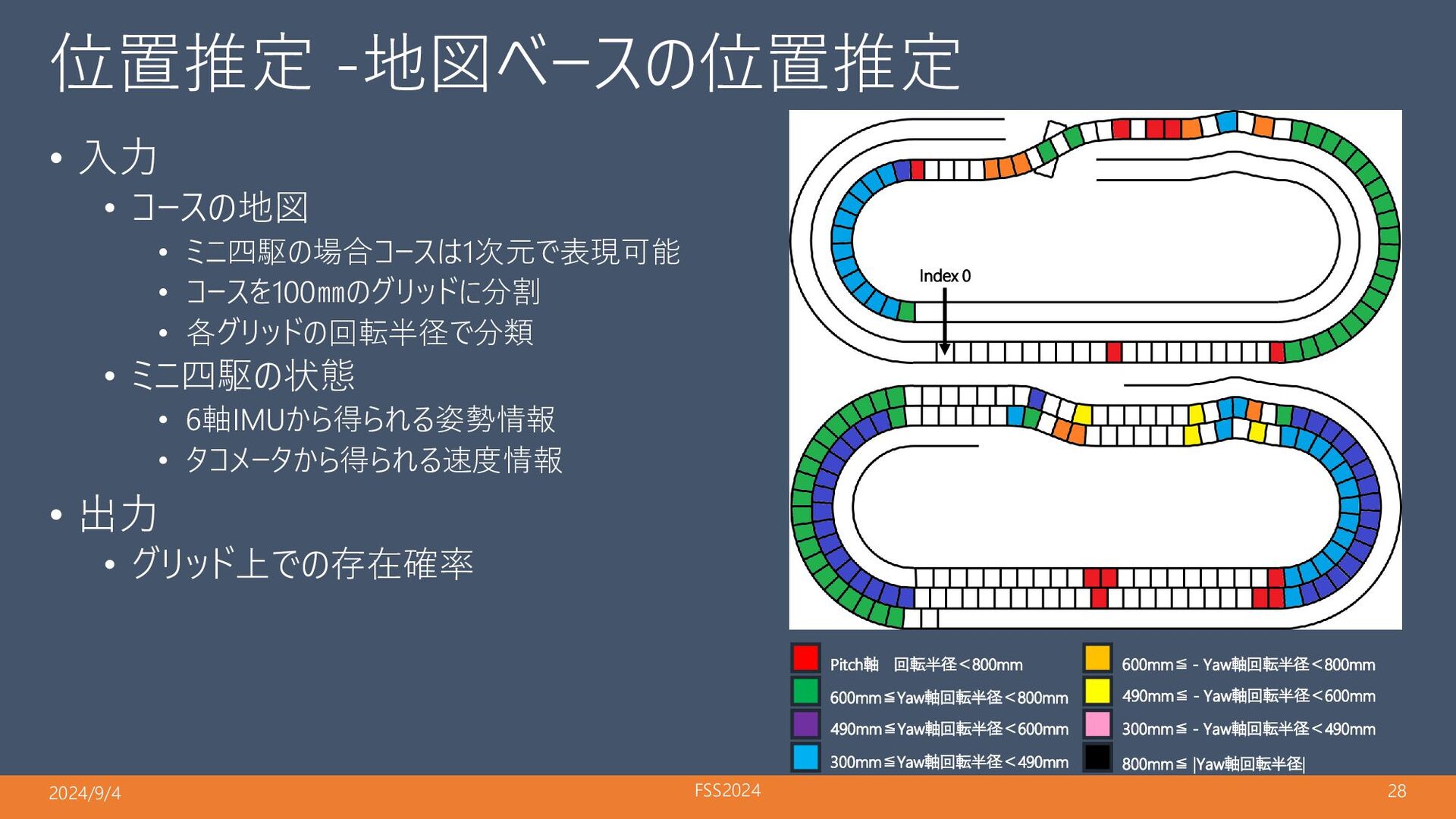
位置推定 -地図ベースの位置推定 • 入力 • コースの地図 • ミニ四駆の場合コースは1次元で表現可能 • コースを100㎜のグリッドに分割
• 各グリッドの回転半径で分類 • ミニ四駆の状態 • 6軸IMUから得られる姿勢情報 • タコメータから得られる速度情報 • 出力 • グリッド上での存在確率 Index 0 Pitch軸 回転半径<800mm 600mm≦Yaw軸回転半径<800mm 490mm≦Yaw軸回転半径<600mm 300mm≦Yaw軸回転半径<490mm 600mm≦ - Yaw軸回転半径<800mm 490mm≦ - Yaw軸回転半径<600mm 300mm≦ - Yaw軸回転半径<490mm 800mm≦ |Yaw軸回転半径| 2024/9/4 FSS2024 28
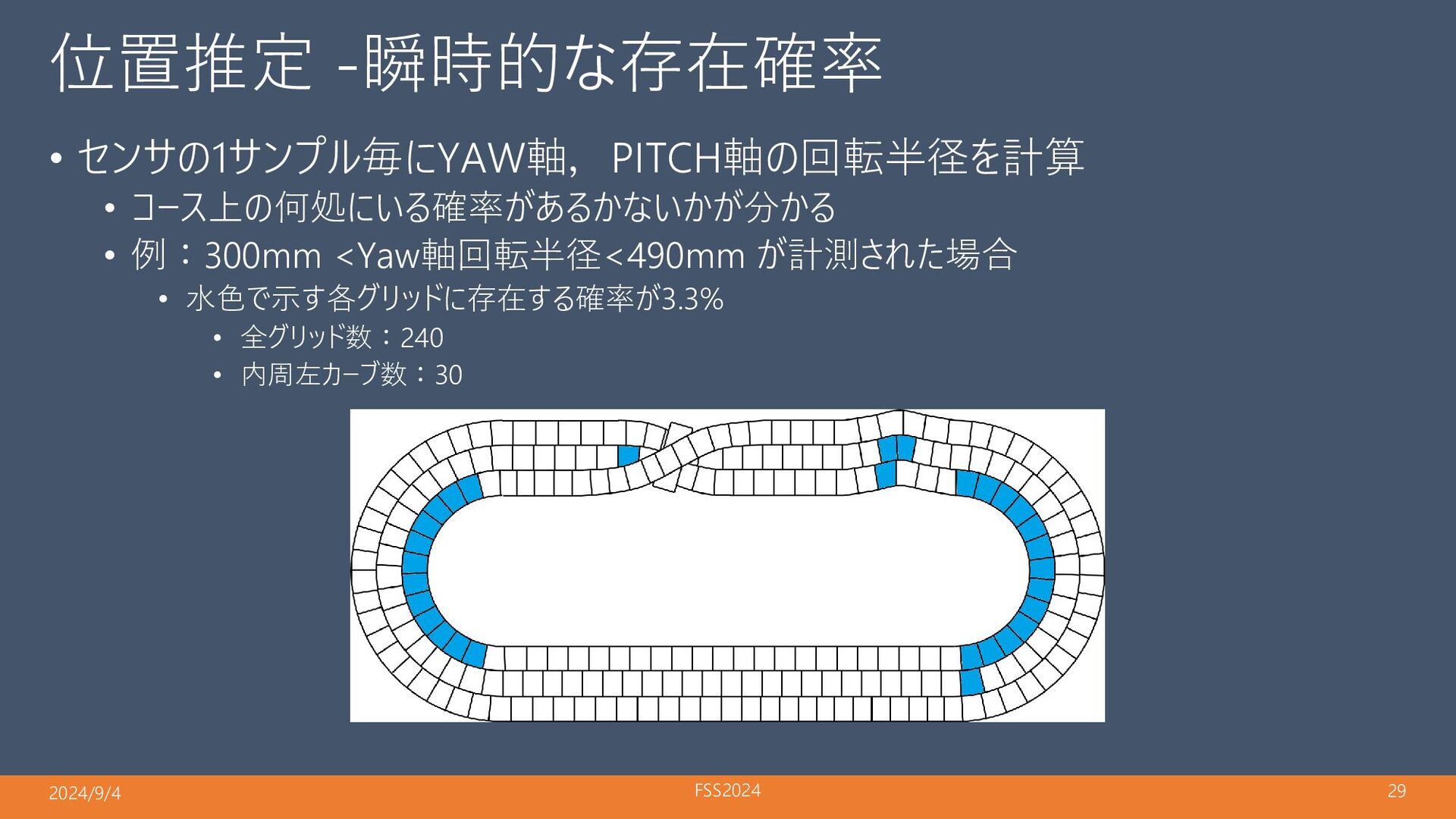
位置推定 -瞬時的な存在確率 • センサの1サンプル毎にYAW軸,PITCH軸の回転半径を計算 • コース上の何処にいる確率があるかないかが分かる • 例:300mm <Yaw軸回転半径<490mm が計測された場合
• 水色で示す各グリッドに存在する確率が3.3% • 全グリッド数:240 • 内周左カーブ数:30 2024/9/4 FSS2024 29
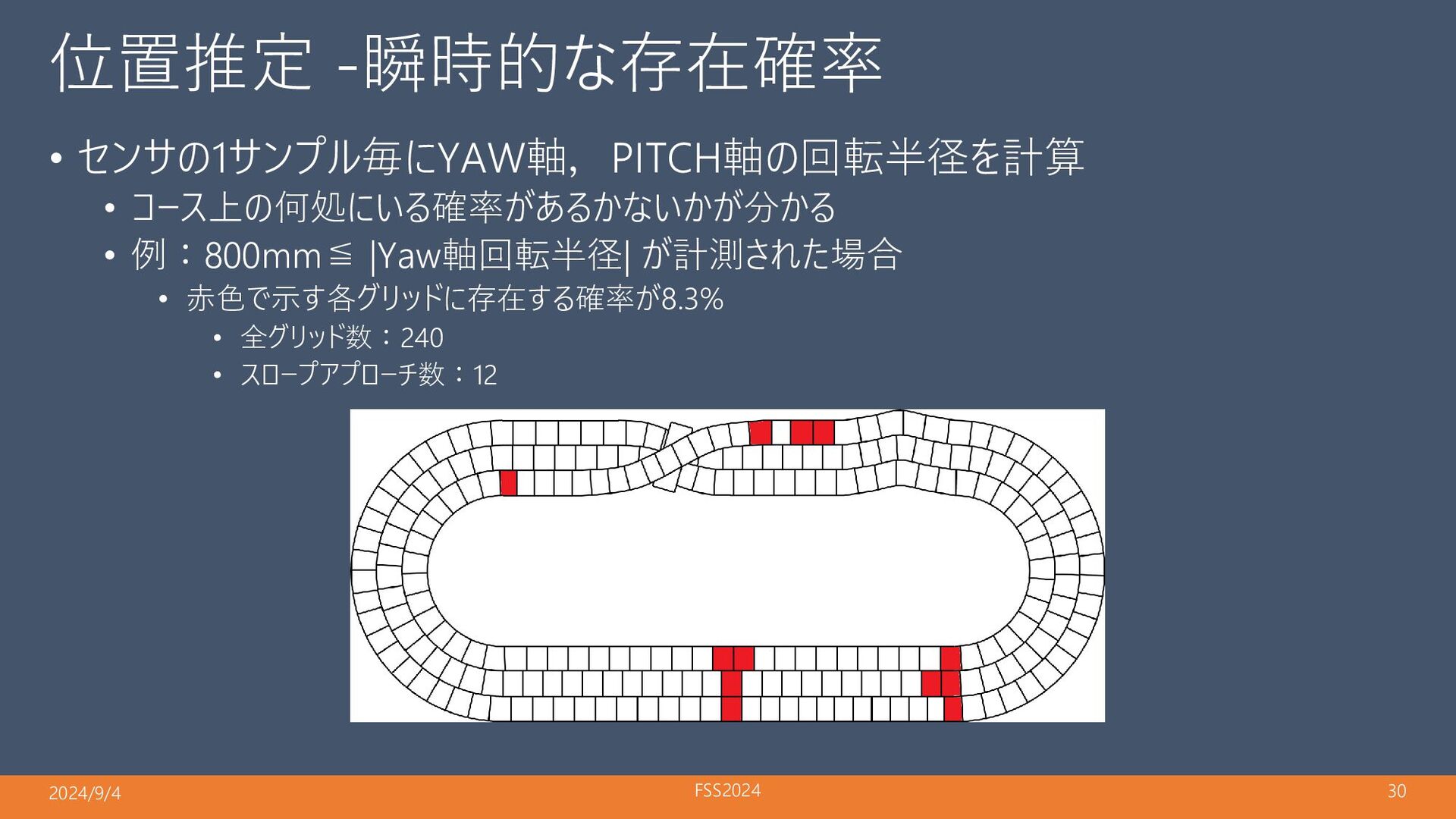
位置推定 -瞬時的な存在確率 • センサの1サンプル毎にYAW軸,PITCH軸の回転半径を計算 • コース上の何処にいる確率があるかないかが分かる • 例:800mm≦ |Yaw軸回転半径| が計測された場合
• 赤色で示す各グリッドに存在する確率が8.3% • 全グリッド数:240 • スロープアプローチ数:12 2024/9/4 FSS2024 30
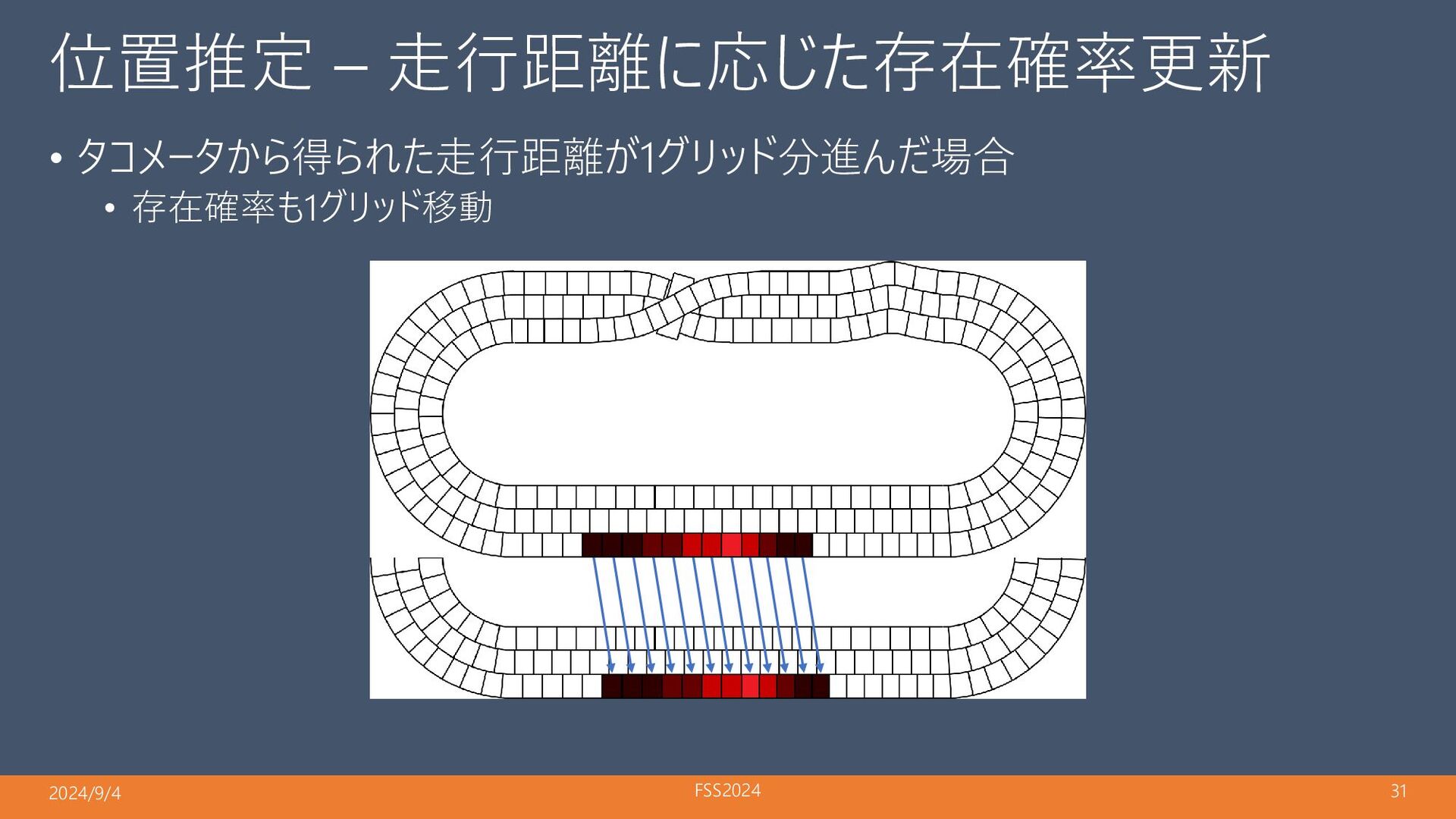
位置推定 – 走行距離に応じた存在確率更新 • タコメータから得られた走行距離が1グリッド分進んだ場合 • 存在確率も1グリッド移動 2024/9/4 FSS2024 31
位置推定 – グリッド上での存在確率 • 瞬時的な存在確率と更新された既存存在確率の重み付き和 • センサ1サンプル毎にこの計算を繰り返す • 最も存在確率が高い箇所を自己位置として解釈 •
メリット • 比較的計算コストが低い • 1ループで実装可能 • デメリット • 位置ロックまでにある程度の距離が必要 2024/9/4 FSS2024 32
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![カメラ映像からの移動距離(真値)測定 2024/9/4 FSS2024 6 1. 複数画像のピーク輝度を合成する事でLEDの軌跡を取得 2. 軌跡から移動距離を計測 215.177[mm]](https://files.speakerdeck.com/presentations/114cfc3bce62437d9fe7f4300728999e/slide_5.jpg){kind=link}
![センサ情報との比較(ストレートセクション) • スリップ率=真の移動距離/観測移動距離 • 実験結果 • 画像から得られた移動距離=215.177[mm] • センサから得られた移動距離=224.914[mm] •](https://files.speakerdeck.com/presentations/114cfc3bce62437d9fe7f4300728999e/slide_6.jpg){kind=link}
![センサ情報との比較(コーナーセクション) • 旋回半径の比を利用 • 円弧上の移動距離[mm] = 2x半径x回転角度[radians] • ミニ四駆の性質上ストレートとは異なる関係性になるのでは(仮説) 2024/9/4](https://files.speakerdeck.com/presentations/114cfc3bce62437d9fe7f4300728999e/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}