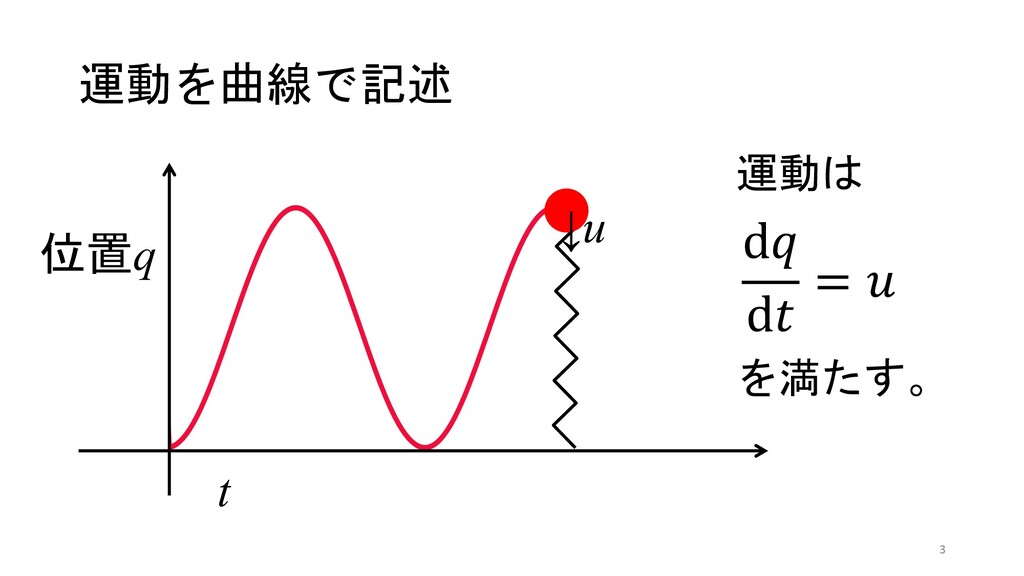
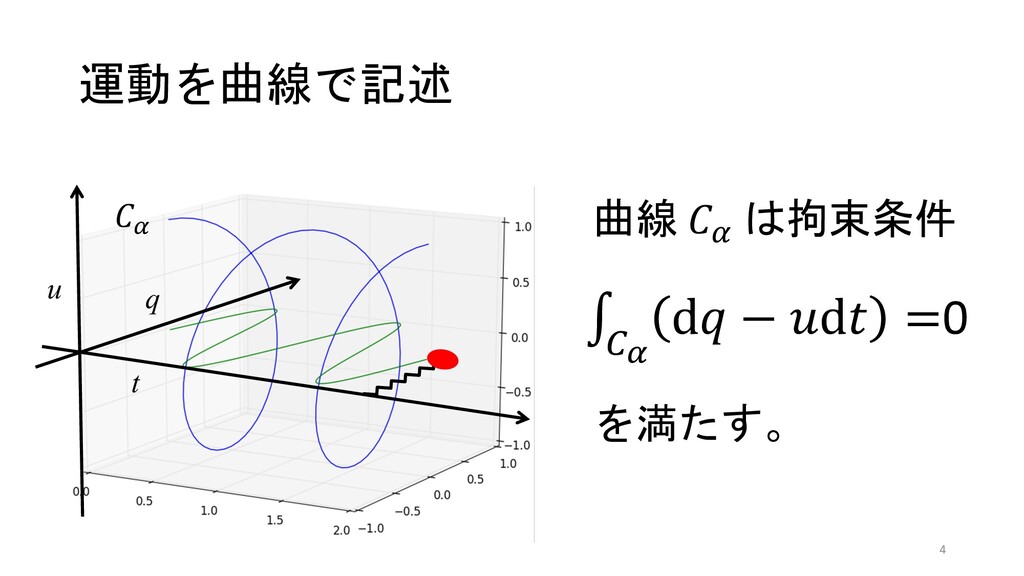
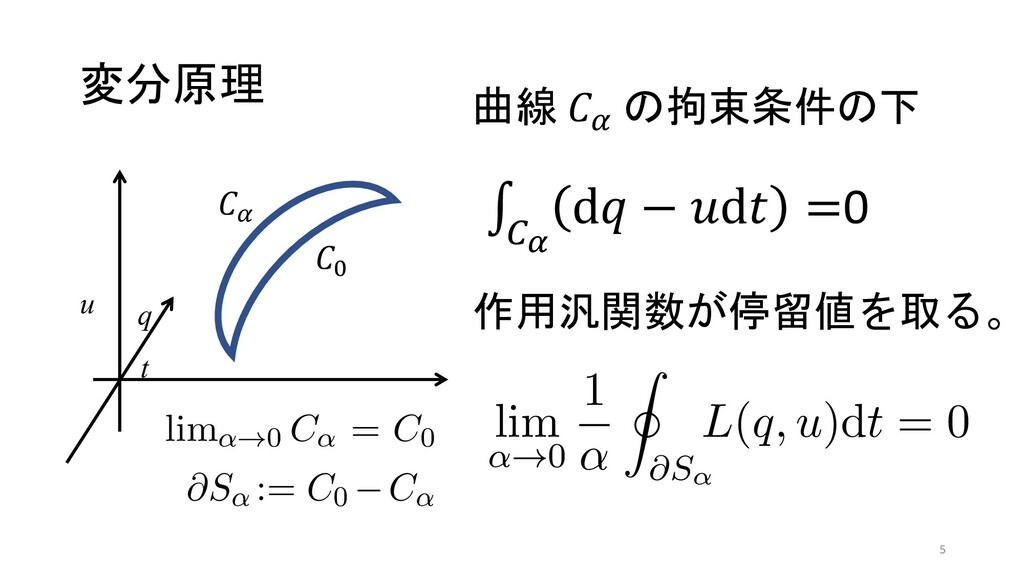
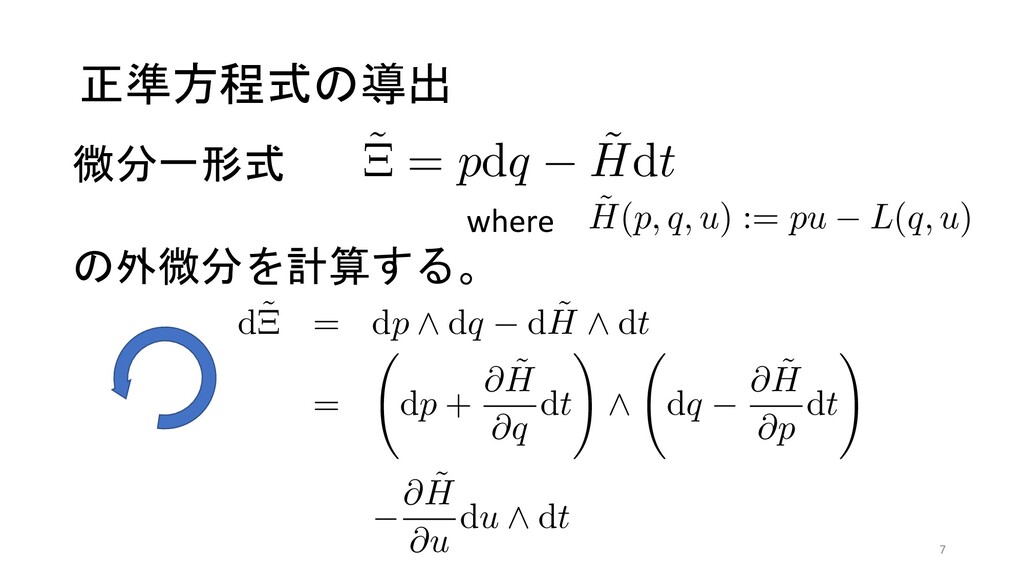
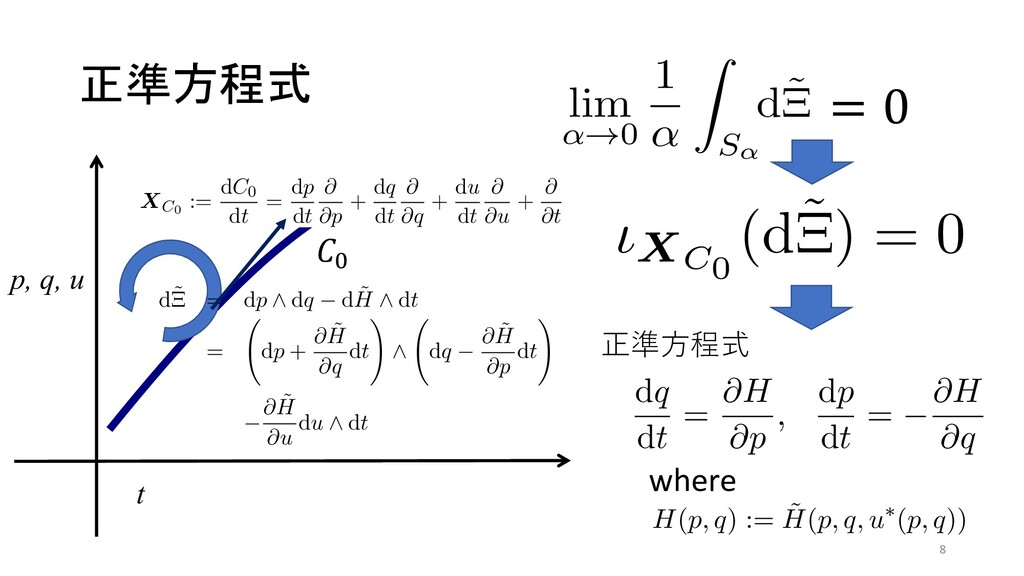
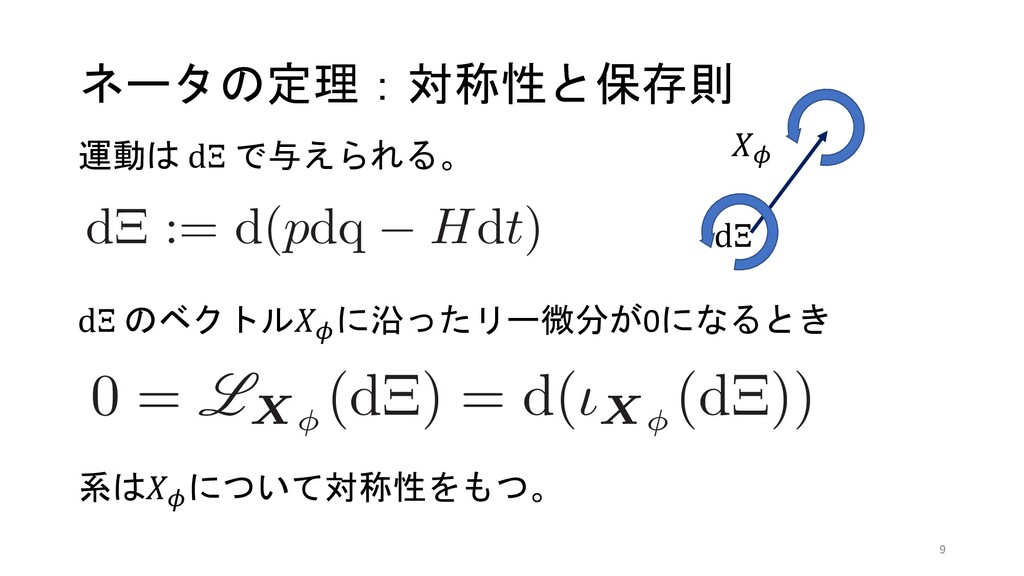
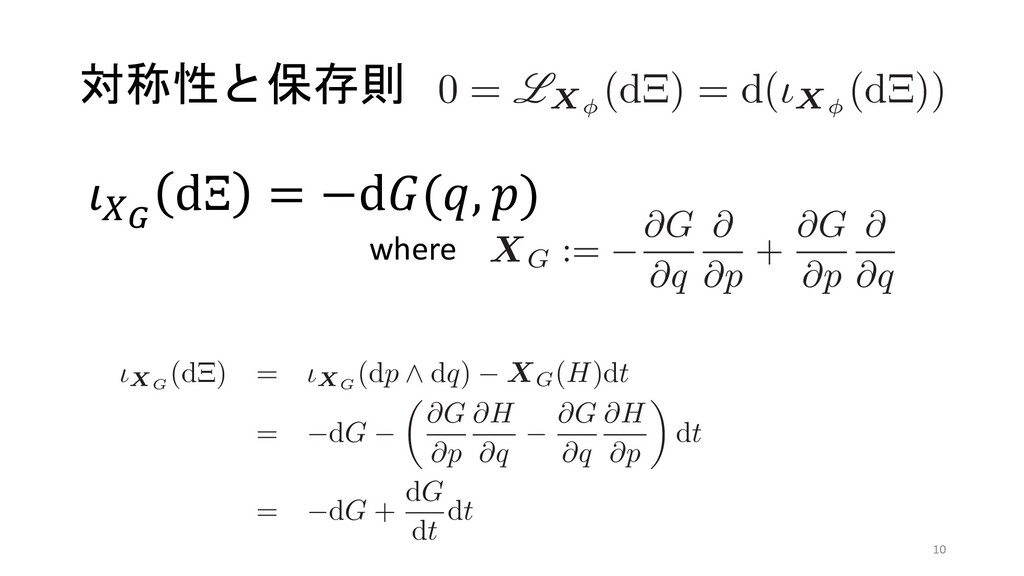
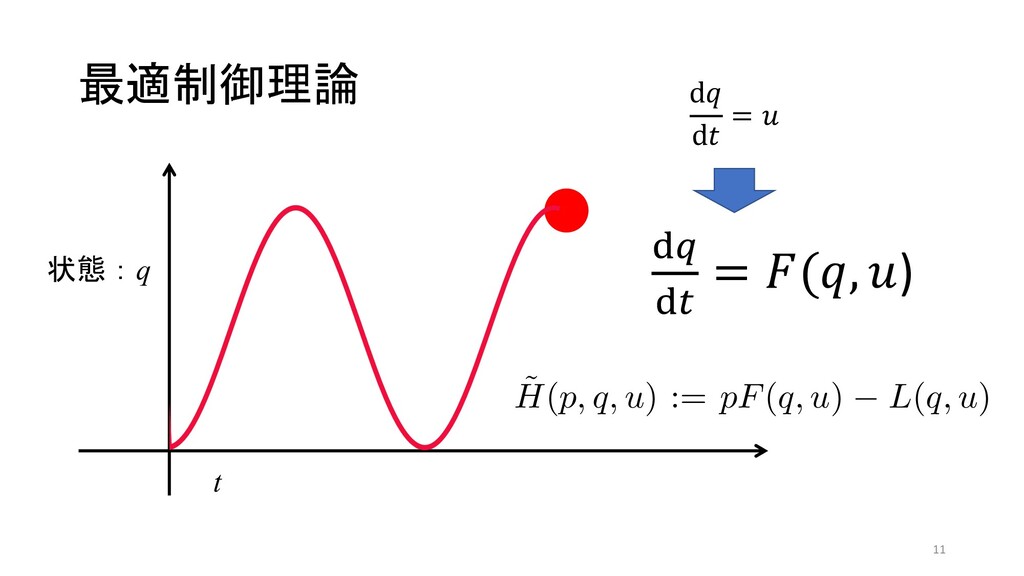
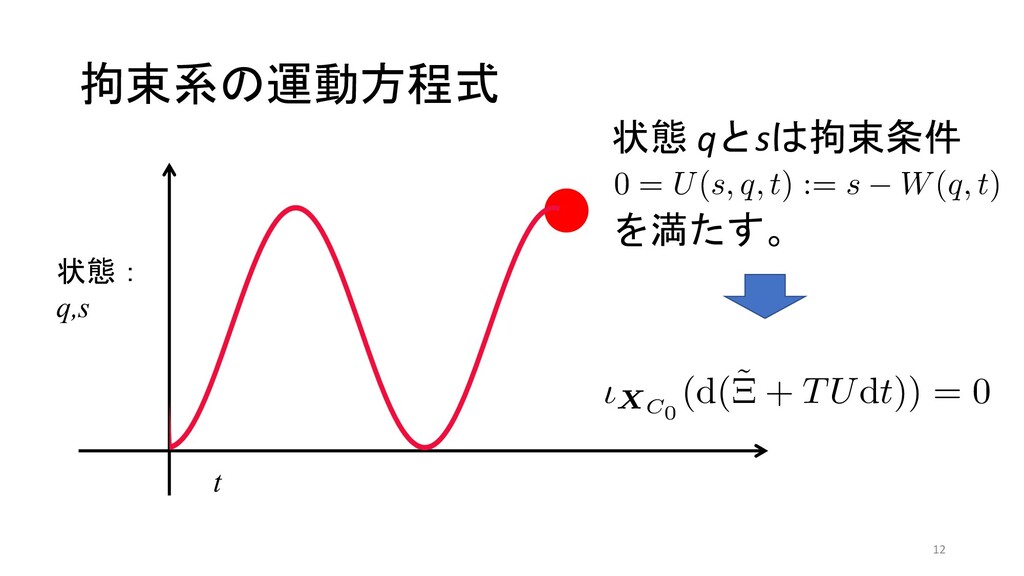
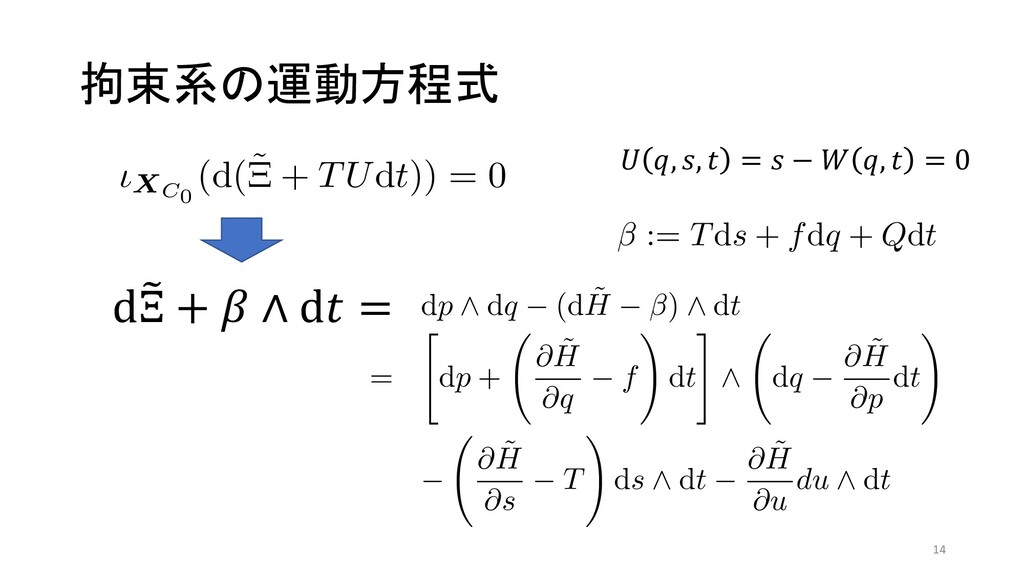
ιXC0 (d˜ Ξ) = 0 Λຬͨ͢ɽ∂ ˜ H/∂u = 0 ͷղ u∗(p, ೖ͠ɼϋϛϧτχΞϯΛ ਂ थ 1DeepFlow גࣜձࣾ e-mail : hiroki.fukagawa@deepflow.co.jp ֓ཁ ݪཧɼ ʮӡಈ͕ඳ͘ۂઢ൚ؔʹఀཹ ༩͑Δʯͱ͍͏ܗͰӡಈ๏ଇΛ༩͑Δɽ࠷ ɼ͜ΕΛඍܗࣜΛͬͯදݱ͢Δɽ͋Δ ྔͷΛಉ࣌ࠁͷଞͷཧྔͷ͚ͩͰఆ ߆ଋ݅ΛϗϩϊϛοΫ߆ଋͱݺͼɼͦ͏ ͍ͷΛඇϗϩϊϛοΫ߆ଋͱݺͿɽຊߘ ɼඇϗϩϊϛοΫ߆ଋͰඍܗࣜͰ༩͑Β ܥͷӡಈΛඍܗࣜͰఆࣜԽ͠ [1]ɼ࿈ଓ ͷ֦ுΛࣔ͢ [2, 3, 4]ɽ ਖ਼४ํఔࣜͷಋग़ ΛಘΔɽӡಈۂઢ C0 ͷϕΫτϧΛ XC0 := dC0 dt = dp dt ∂ ∂p + dq dt ∂ ∂q + du dt ∂ ∂u + ͱ͢Εɼࣜ (3) ΑΓӡಈ ιXC0 (d˜ Ξ) = 0 Λຬͨ͢ɽ∂ ˜ H/∂u = 0 ͷղ u∗(p, q) Λࣜ ( ೖ͠ɼϋϛϧτχΞϯΛ H(p, q) := ˜ H(p, q, u∗(p, q)) ϩϊϛοΫ߆ଋͱݺͼɼͦ͏ ϩϊϛοΫ߆ଋͱݺͿɽຊߘ οΫ߆ଋͰඍܗࣜͰ༩͑Β ඍܗࣜͰఆࣜԽ͠ [1]ɼ࿈ଓ [2, 3, 4]ɽ ͷಋग़ ӡಈΛߟ͑Δɽ࣭ͷ࣌ࠁ t Ґஔ q ͱ u Ͱ༩͑ΒΕΔɽ ɼdq/dt = u ΑΓ u Ͱ ۭؒͰӡಈۂઢ C0 (dq − udt) = 0 (1) ιXC0 (d˜ Ξ) = 0 Λຬͨ͢ɽ∂ ˜ H/∂u = 0 ͷղ u∗(p, q) Λࣜ ೖ͠ɼϋϛϧτχΞϯΛ H(p, q) := ˜ H(p, q, u∗(p, q)) ͱ͢ΕɼӡಈํఔࣜͰ͋Δਖ਼४ํఔ dq dt = ∂H ∂p , dp dt = − ∂H ∂q ͕ಘΒΕΔɽ ࣭ͷ u ͕Ґஔ q ͷ࣌ؒൃలΛܾ t p, q, u !" 8 ͯ͠ɼετʔΫεͷఆཧΑΓ࣍ΛಘΔɽ 0 = lim α→0 1 α ∂Sα ˜ Ξ = lim α→0 1 α Sα d˜ Ξ (3) ∂Sα ͱ Sα ɼ(p, q, u, t) ্ۭؒͷ͖͖ͷด ۂઢͱͦΕʹғ·Εͨ໘ੵͰ͋ΔɽϓϨϋϛϧ τχΞϯΛ ˜ H(p, q, u) := pu − L(q, u) (4) ͱ͢Εɼ˜ Ξ = pdq − ˜ Hdt ͱͳΓɼ d˜ Ξ = dp ∧ dq − d ˜ H ∧ dt = dp + ∂ ˜ H ∂q dt ∧ dq − ∂ ˜ H ∂p dt − ∂ ˜ H ∂u du ∧ dt (5) 3 ߆ଋܥͷӡಈ๏ଇ ϥάϥϯδΞϯ L Λ (q, u, s) ͷؔͱ͠ɼ ଶྔ s ͕ଞͷঢ়ଶྔͷؔ W(q, t) ͱͳΔͱ 0 = U(s, q, t) := s − W(q, t) ( ͱͳΓɼ͜ΕΛϗϩϊϛοΫ߆ଋ݅ͱݺ ະఆ T ʹର͠ɼ ͕࣍ຬͨ͞ΕΔɽ 0= lim α→0 1 α ∂Sα TUdt = lim α→0 1 α Sα d(TUdt) ( ࣜ (11) Λߟྀ͢Εɼd(TUdt) = TdU ∧d ͳΔɽ͜͜Ͱඍ 1 ܗࣜ β Λಋೖ͢Δɽ β := Tds + fdq + Qdt ( ຊԠ༻ཧֶձ 2021 ձ ߨԋ༧ߘू (2021.9.7–9) Copyright (C) 2021 Ұൠࣾஂ๏ਓຊԠ༻ཧֶձ ͯ͠ɼετʔΫεͷఆཧΑΓ࣍ΛಘΔɽ 0 = lim α→0 1 α ∂Sα ˜ Ξ = lim α→0 1 α Sα d˜ Ξ (3) ∂Sα ͱ Sα ɼ(p, q, u, t) ্ۭؒͷ͖͖ͷด ۂઢͱͦΕʹғ·Εͨ໘ੵͰ͋ΔɽϓϨϋϛϧ τχΞϯΛ ˜ H(p, q, u) := pu − L(q, u) (4) ͱ͢Εɼ˜ Ξ = pdq − ˜ Hdt ͱͳΓɼ d˜ Ξ = dp ∧ dq − d ˜ H ∧ dt = 0 where flow.co.jp ؔʹఀཹ ༩͑Δɽ࠷ ͢Δɽ͋Δ ͚ͩͰఆ ݺͼɼͦ͏ ݺͿɽຊߘ ࣜͰ༩͑Β ͠ [1]ɼ࿈ଓ ͷ࣌ࠁ t ༩͑ΒΕΔɽ Γ u Ͱ ΛಘΔɽӡಈۂઢ C0 ͷϕΫτϧΛ XC0 := dC0 dt = dp dt ∂ ∂p + dq dt ∂ ∂q + du dt ∂ ∂u + ∂ ∂t (6) ͱ͢Εɼࣜ (3) ΑΓӡಈ ιXC0 (d˜ Ξ) = 0 (7) Λຬͨ͢ɽ∂ ˜ H/∂u = 0 ͷղ u∗(p, q) Λࣜ (4) ʹ ೖ͠ɼϋϛϧτχΞϯΛ H(p, q) := ˜ H(p, q, u∗(p, q)) (8) ͱ͢ΕɼӡಈํఔࣜͰ͋Δਖ਼४ํఔࣜ dq dt = ∂H ∂p , dp dt = − ∂H ∂q (9) 正準⽅程式
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}