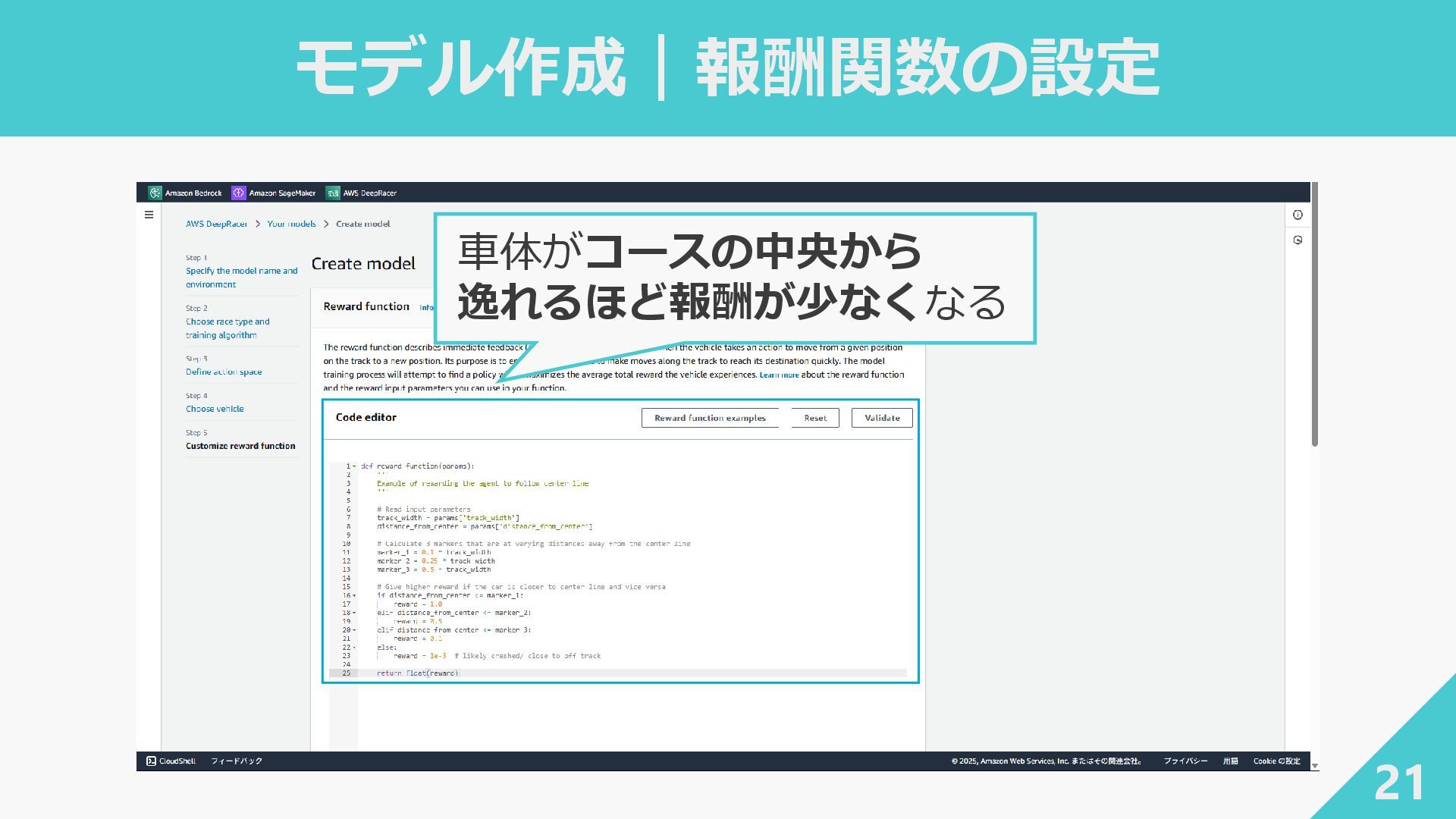
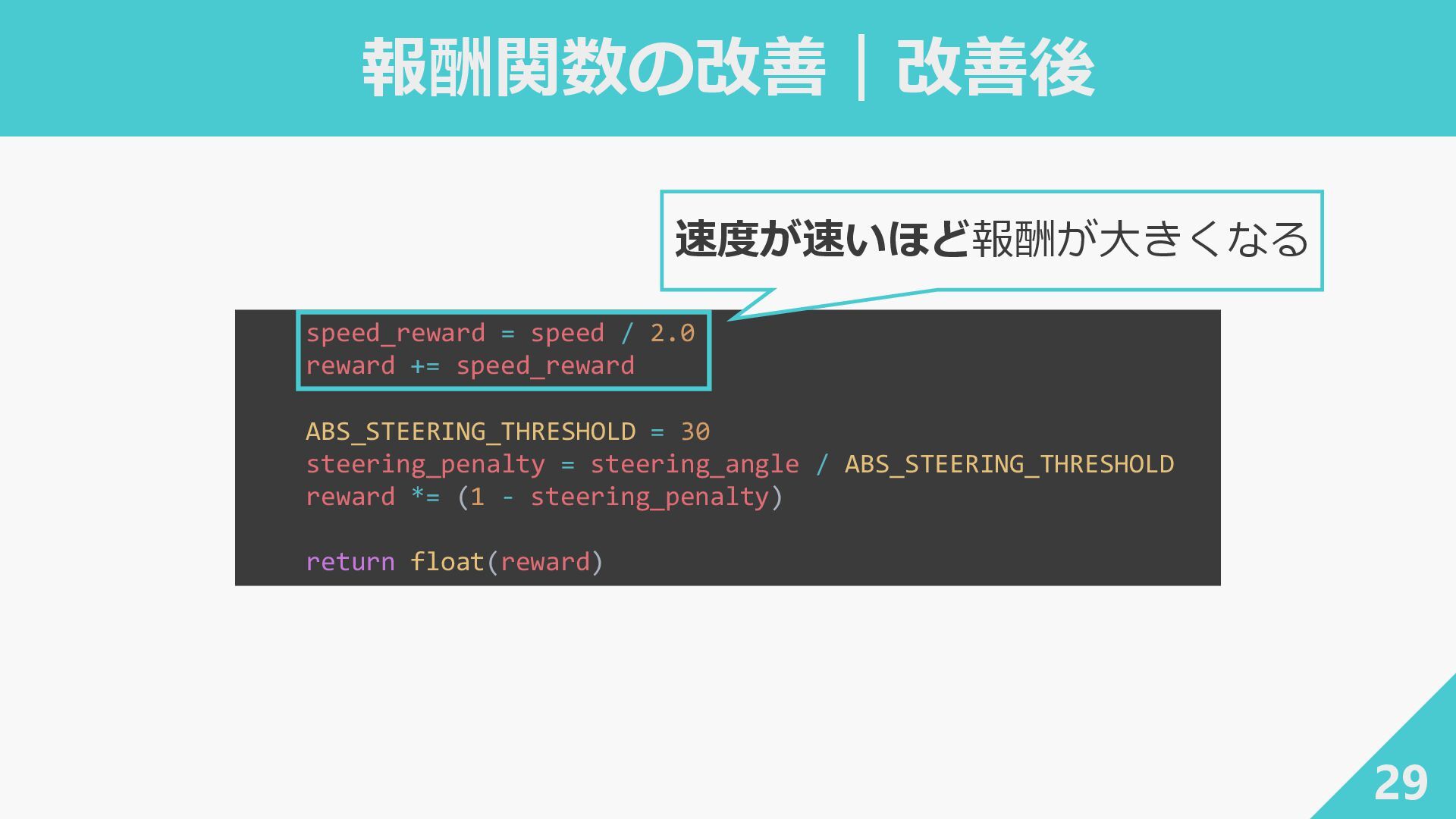
marker_1 = 0.1 * track_width marker_2 = 0.25 * track_width marker_3 = 0.5 * track_width if distance_from_center <= marker_1: reward = 1.0 elif distance_from_center <= marker_2: reward = 0.5 elif distance_from_center <= marker_3: reward = 0.1 else: reward = 1e-3 return float(reward) 車体がコースの中央から 逸れるほど報酬が少なくなる
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![AWS DeepRacer ┃公式より引用[1] 6 強化学習を楽しく、実践的に学べる プラットフォーム あらゆるレベルレベルのデベロッパーが、クラウドベースの3Dレーシング シミュレーター、強化学習により駆動する1/18スケールの 完全自走型レーシングカーを通じて機械学習を実践的に学べます。 [1]](https://files.speakerdeck.com/presentations/baee0e37b1fc4b669341d484600fc254/slide_5.jpg){kind=link}
![AWS DeepRacer ┃公式より引用[1] 7 強化学習を楽しく、実践的に学べる プラットフォーム あらゆるレベルレベルのデベロッパーが、クラウドベースの3Dレーシング シミュレーター、強化学習により駆動する1/18スケールの 完全自走型レーシングカーを通じて機械学習を実践的に学べます。 [1]](https://files.speakerdeck.com/presentations/baee0e37b1fc4b669341d484600fc254/slide_6.jpg){kind=link}
![AWS DeepRacer ┃昨年のAWS Summit Japanでは日本一決定戦も実施[2] 8 [2] https://aws.amazon.com/jp/builders-flash/202408/deepracer-jp-championship/](https://files.speakerdeck.com/presentations/baee0e37b1fc4b669341d484600fc254/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![報酬関数の改善|改善前 26 def reward_function(params): track_width = params['track_width'] distance_from_center = params['distance_from_center']](https://files.speakerdeck.com/presentations/baee0e37b1fc4b669341d484600fc254/slide_25.jpg){kind=link}
![報酬関数の改善|改善前 27 def reward_function(params): track_width = params['track_width'] distance_from_center = params['distance_from_center']](https://files.speakerdeck.com/presentations/baee0e37b1fc4b669341d484600fc254/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}