Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Forklift Goal Condition Reinforcement Learning ...
Search
takeofuture
May 17, 2026
Technology
110
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Forklift Goal Condition Reinforcement Learning by Gazebo + ROS2 topic
takeofuture
May 17, 2026
More Decks by takeofuture
See All by takeofuture
MarineGym 水中シミュレータ
takeofuture
0
69
BLUVIC(SportへのAI活用)ハッカソン発表資料
takeofuture
0
23
ROSAというLLM使ったROSエージェントをおもちゃに実装してみた話
takeofuture
0
250
2025/11/14 ロボセミでの発表資料
takeofuture
0
130
20240827_LLM発表
takeofuture
0
300
Other Decks in Technology
See All in Technology
現場で使える AWS DevOps Agent 活用ノウハウ - Release Management 機能の検証結果を添えて / AWS DevOps Agent Release Management and Know-How
kinunori
5
830
AI駆動開発は個人技からチーム戦へ:組織でAIを使いこなすための実践設計
moongift
PRO
0
380
BigQuery を検索ソースとした AI Agent の作り方って 〇〇 通りあんねん
satohjohn
0
150
初めてのGitHub Actions / GitHub Actions at First
tooppoo
0
110
reFACToring
moznion
1
1.1k
事業成長とAI活用を止めないデータ基盤アーキテクチャの設計思想
hiracky16
0
790
AI ネイティブな組織に Gemini Enterprise Agent Platform がなぜ必要なのか
asei
1
130
実践が先生だった— 新卒サーバーエンジニア1年目のリアル
mixi_engineers
PRO
0
220
MCPをつなげて作る組織横断のAIエージェント基盤
tsubakimoto_s
0
490
『モンスターストライク』 の運営に伴走する! データ民主化への 解析グループの3つのアプローチ
mixi_engineers
PRO
0
190
Webの技術とガジェットで子どもも大人も楽しめるワクワク体験を提供する / Qiita Tech Festa Day 2026
you
PRO
1
330
LangfuseによるLLMOps基盤の構築と活用事例
zozotech
PRO
1
220
Featured
See All Featured
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
500
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
620
Understanding Cognitive Biases in Performance Measurement
bluesmoon
32
3k
Building Better People: How to give real-time feedback that sticks.
wjessup
370
20k
End of SEO as We Know It (SMX Advanced Version)
ipullrank
3
4.3k
Making Projects Easy
brettharned
120
6.7k
Code Review Best Practice
trishagee
74
20k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
4k
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
470
Learning to Love Humans: Emotional Interface Design
aarron
275
41k
Building a A Zero-Code AI SEO Workflow
portentint
PRO
0
650
Side Projects
sachag
455
43k
Transcript
0 仮想物理シミュレーション環境GAZEBO 強化学習は大変だった。 倉庫での自動運転への応用を夢見て フリーランサー 柴田たけお
興味のある仕事 ▪ 先端技術と情報技術の融合と応用 ▪ データサイエンス ▪ AI(生成AI,分析AI,識別AI), 統計や機械学習 ▪ ロボット、AI支援型CADや部品設計製造
柴田 たけお ▪ 愛知県名古屋市生まれ豊田市育ち ▪ 大学,大学院では地球物理専攻 ▪ 本業ロサンゼルス商社のデータサイエンティスト 個人でAI関連含むプロジェクト多数やったつもり ▪ 愛知県豊田市の空家に年数回滞在(日米2拠点生活) 基本情報 趣味 ▪ キャンプやハイキング ▪ 自転車旅行 ▪ 青春18切符でのんびり列車旅行 ▪ 食べること @takeofuture https://zenn.dev/takeofuture
▪ GAZEBOとは ▪ 強化学習とは ▪ 環境や物体を定義 ▪ コマンド(テレオペ)でマニュアル操作デモ ▪ 強化学習方針(Phase別の報酬設計と制約)
▪ 1地点目標の強化学習の様子 ▪ 目標条件付き強化学習: 通路1(AISLE-1)の全てのBIN(仕切り)で ▪ 目標条件付き強化学習: 全通路、全仕切りで ▪ 目標条件付き強化学習: 全通路、全棚(4つの高さ)で ▪ 動的位置へのへの強化学習へ! 目次
GAZEBOとは 物理エンジンを搭載したシミュレータ • ライセンス形態 :オープンソース。Gazebo Sim関連ライブラリは主に Apache License 2.0。 •
物理エンジン :現在のGazebo Simは標準で DART を使用。Gazebo Physicsの抽象レイヤーにより、他の物理エンジンもプラグインとして切替・追加可能。 • ROS 2連携:ros_gz_bridge により、ROS 2とGazebo間でtopic/serviceを橋渡しでき、joint state、センサー情報、制御コマンドなどを相互にやり取りできる。 • 用途:実機を使う前に、ロボットの移動・衝突・センサー・制御を仮想環境で検証できる。 👉完全仮想の世界と現実世界のギャップを埋める! 仮想世界 シミュレータ 厳しい現実
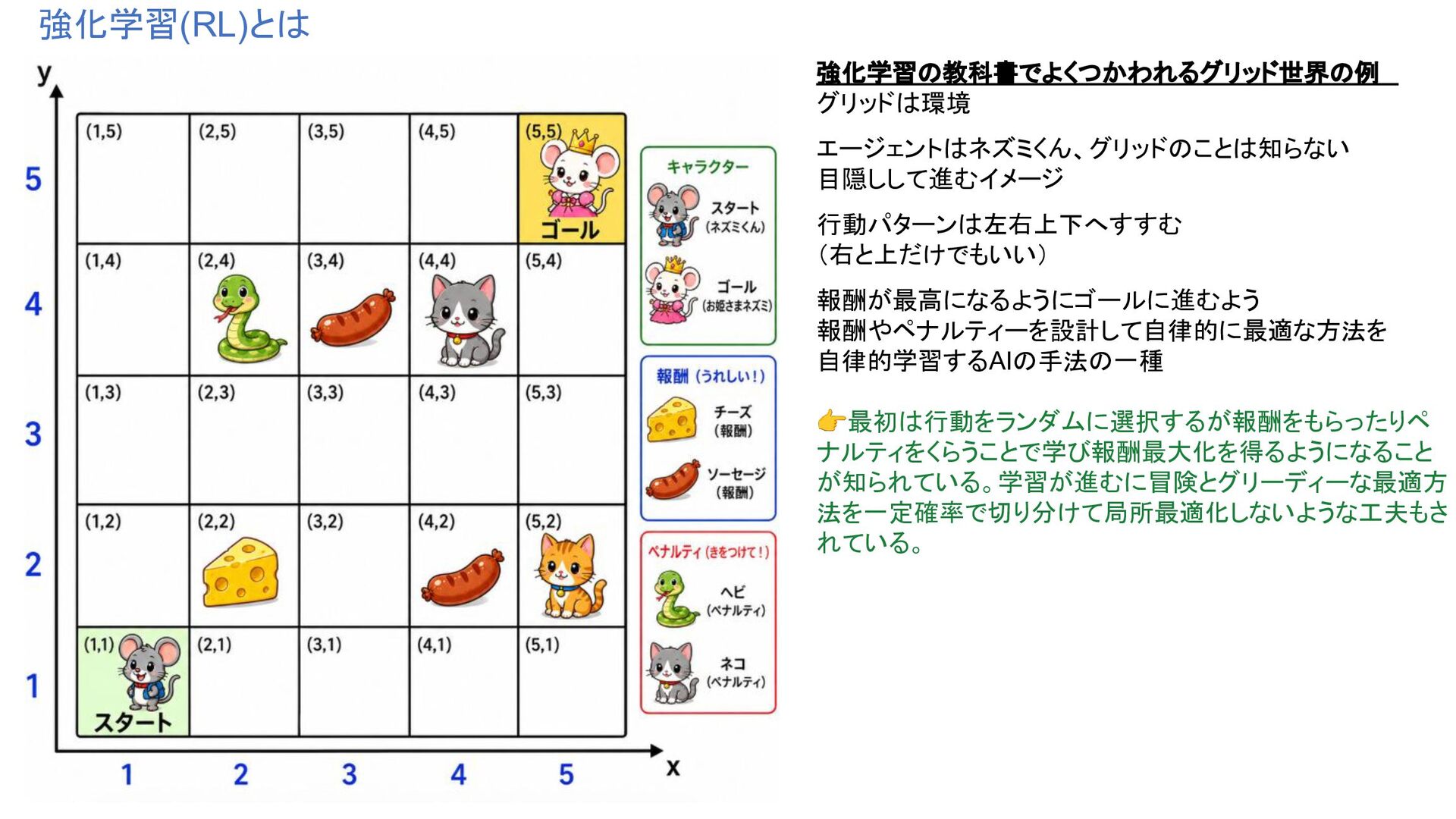
強化学習(RL)とは 強化学習の教科書でよくつかわれるグリッド世界の例 グリッドは環境 エージェントはネズミくん、グリッドのことは知らない 目隠しして進むイメージ 行動パターンは左右上下へすすむ (右と上だけでもいい) 報酬が最高になるようにゴールに進むよう 報酬やペナルティーを設計して自律的に最適な方法を 自律的学習するAIの手法の一種
👉最初は行動をランダムに選択するが報酬をもらったりペ ナルティをくらうことで学び報酬最大化を得るようになること が知られている。学習が進むに冒険とグリーディーな最適方 法を一定確率で切り分けて局所最適化しないような工夫もさ れている。
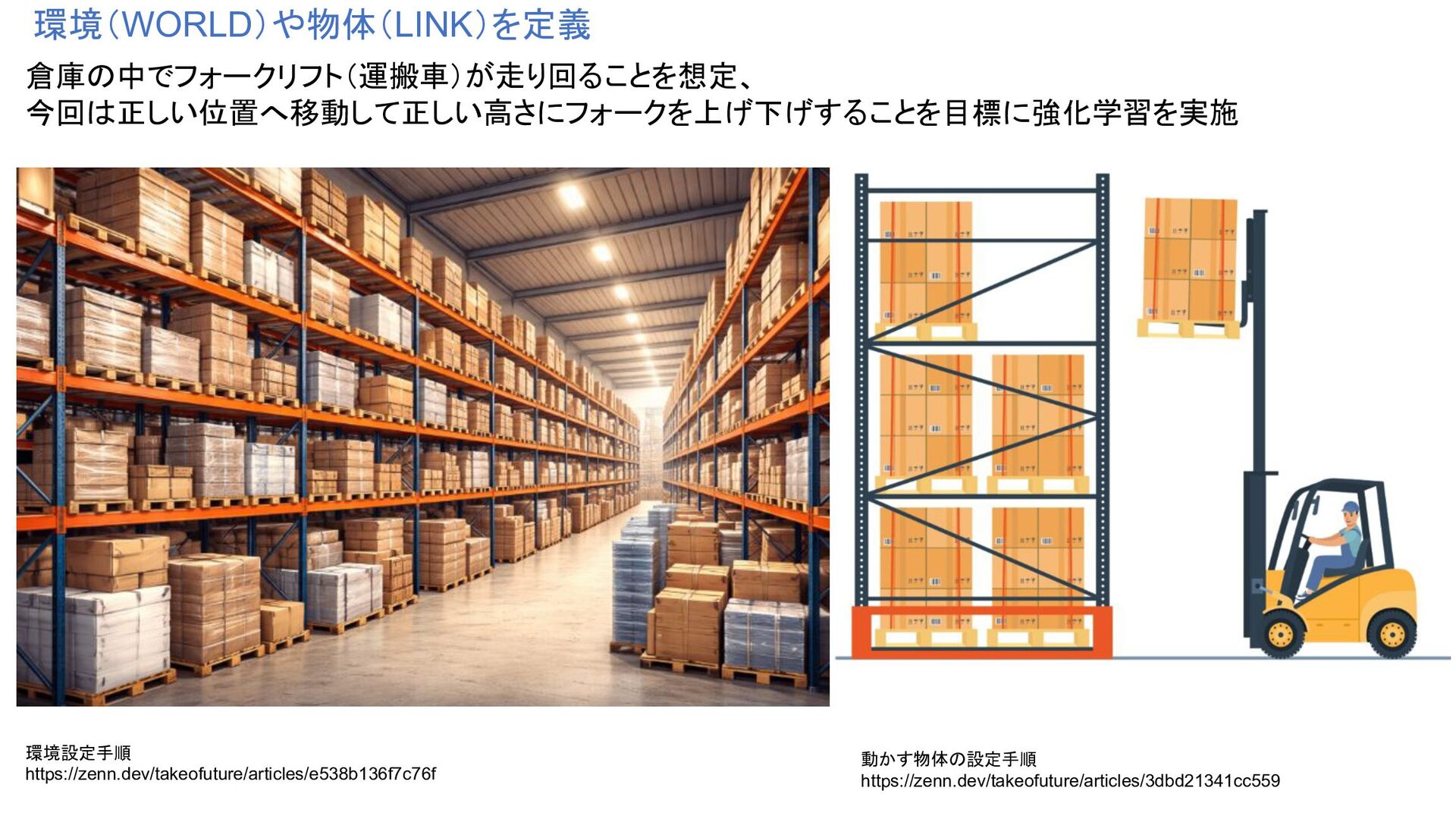
環境(WORLD)や物体(LINK)を定義 倉庫の中でフォークリフト(運搬車)が走り回ることを想定、 今回は正しい位置へ移動して正しい高さにフォークを上げ下げすることを目標に強化学習を実施 環境設定手順 https://zenn.dev/takeofuture/articles/e538b136f7c76f 動かす物体の設定手順 https://zenn.dev/takeofuture/articles/3dbd21341cc559
コマンド(テレオペ)でマニュアル操作デモ (1/2) https://youtu.be/QrG-AIYCT8E
コマンド(テレオペ)でマニュアル操作デモ (2/2) https://youtu.be/Vld0L7_i6r4
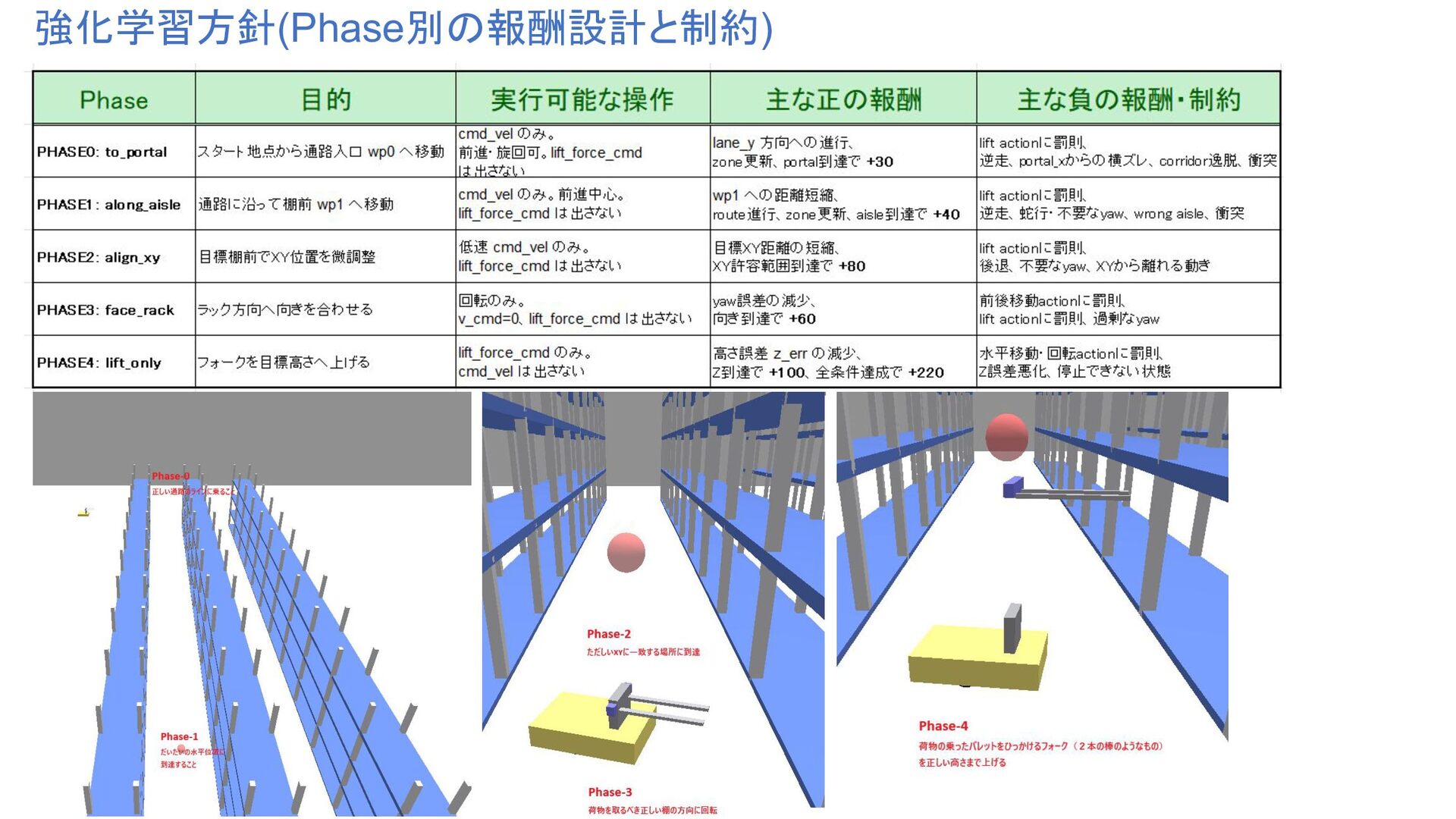
強化学習方針(Phase別の報酬設計と制約)
1地点目標の強化学習の様子(学習開始直後)-8倍速 https://youtu.be/h8_ik2MMa1Q
1地点目標の強化学習の様子(12時間後) -8倍速 https://youtu.be/ryuGt80PJNQ
1地点目標の強化学習の様子(18時間後) -8倍速 https://youtu.be/h35cJJO35sY
目標条件付き強化学習: 通路1(AISLE-1)の全てのBIN(仕切り)(x12倍速) https://youtu.be/PHuq5DijnAs
目標条件付き強化学習: 全通路、全仕切りで(x12倍速) https://youtu.be/4-ufc__PxLg
目標条件付き強化学習: 全通路、全棚 (16倍速)-学習18H https://youtu.be/Q725HpHPk5Q
https://youtu.be/lkYCmgHFg6Y 目標条件付き強化学習: 全通路、全棚 (16倍速)-学習36H
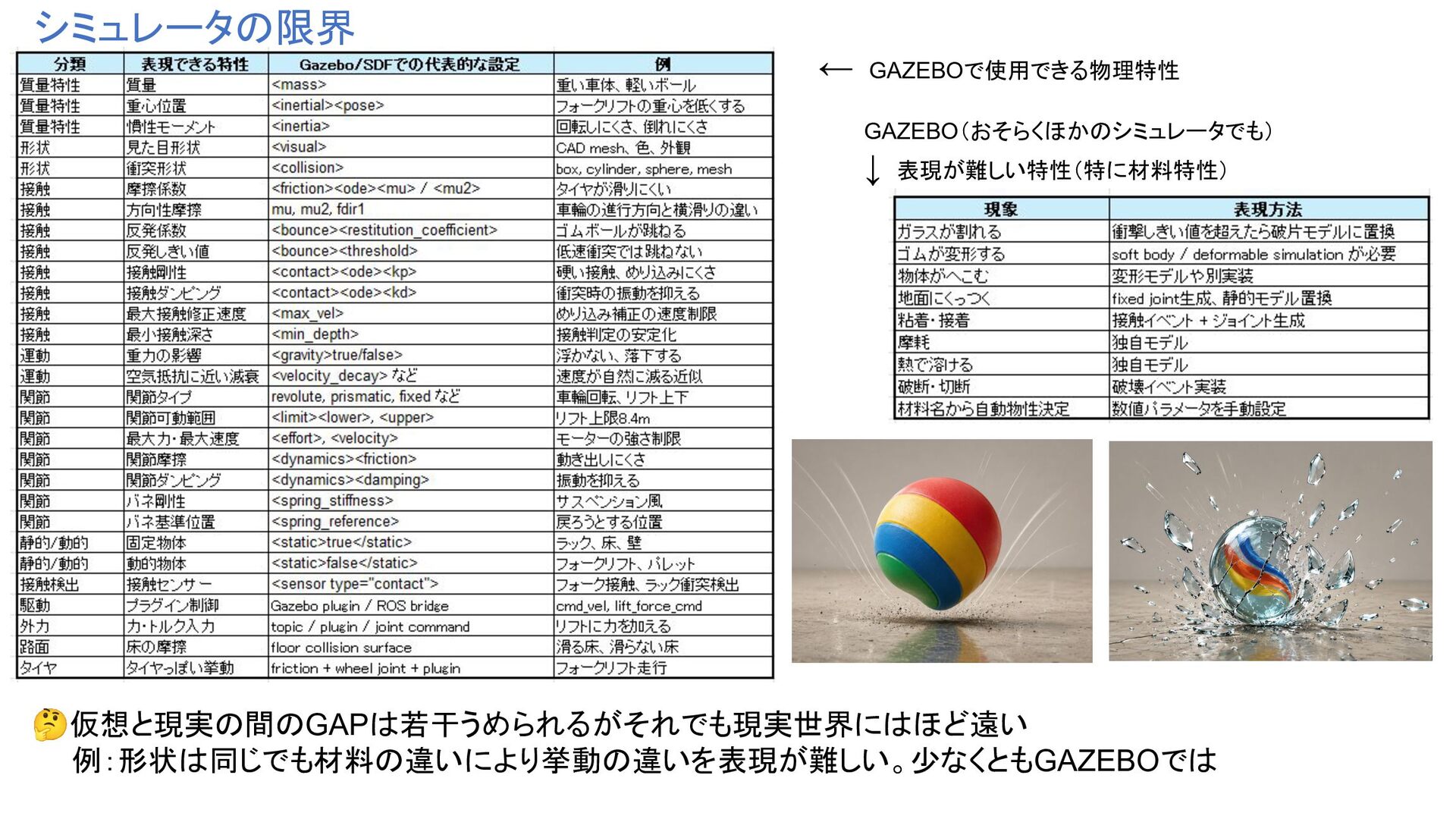
シミュレータの限界 ← GAZEBOで使用できる物理特性 GAZEBO(おそらくほかのシミュレータでも) ↓ 表現が難しい特性(特に材料特性) 🤔仮想と現実の間のGAPは若干うめられるがそれでも現実世界にはほど遠い 例:形状は同じでも材料の違いにより挙動の違いを表現が難しい。少なくともGAZEBOでは
まとめ やっぱり強化学習は結構使える! GAZEBOの衝突センサがあまり機能しなかった(衝突は座標位置で判定) でも報酬をどう定義してやるかが大事、今回は完全なEND2ENDの強化学習ではない 人間の経験などの報酬関数への反映はまだまだ必要だと感じた 列や仕切りの数が変わっても少しの継続学習で使えそう、一方棚の数の増大は初期の学習を 大きく崩す 実世界の応用にはまだまだ遠い道のり 👉台車をもっと精密に作る必要あり(重さ、摩擦係数、形状、重心への配慮,CADの利用が有力) 👉棚をもっと精密に作る必要(これもCADの利用が王道)
👉初期開始位置も動的にできるか 👉LIDAR、カメラやセンサーのデバッグ必要 *まだ途中でしか投稿できてませんが、続きもまとめてコードも含めてブログに投稿予定です zenn.dev/takeofuture
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}