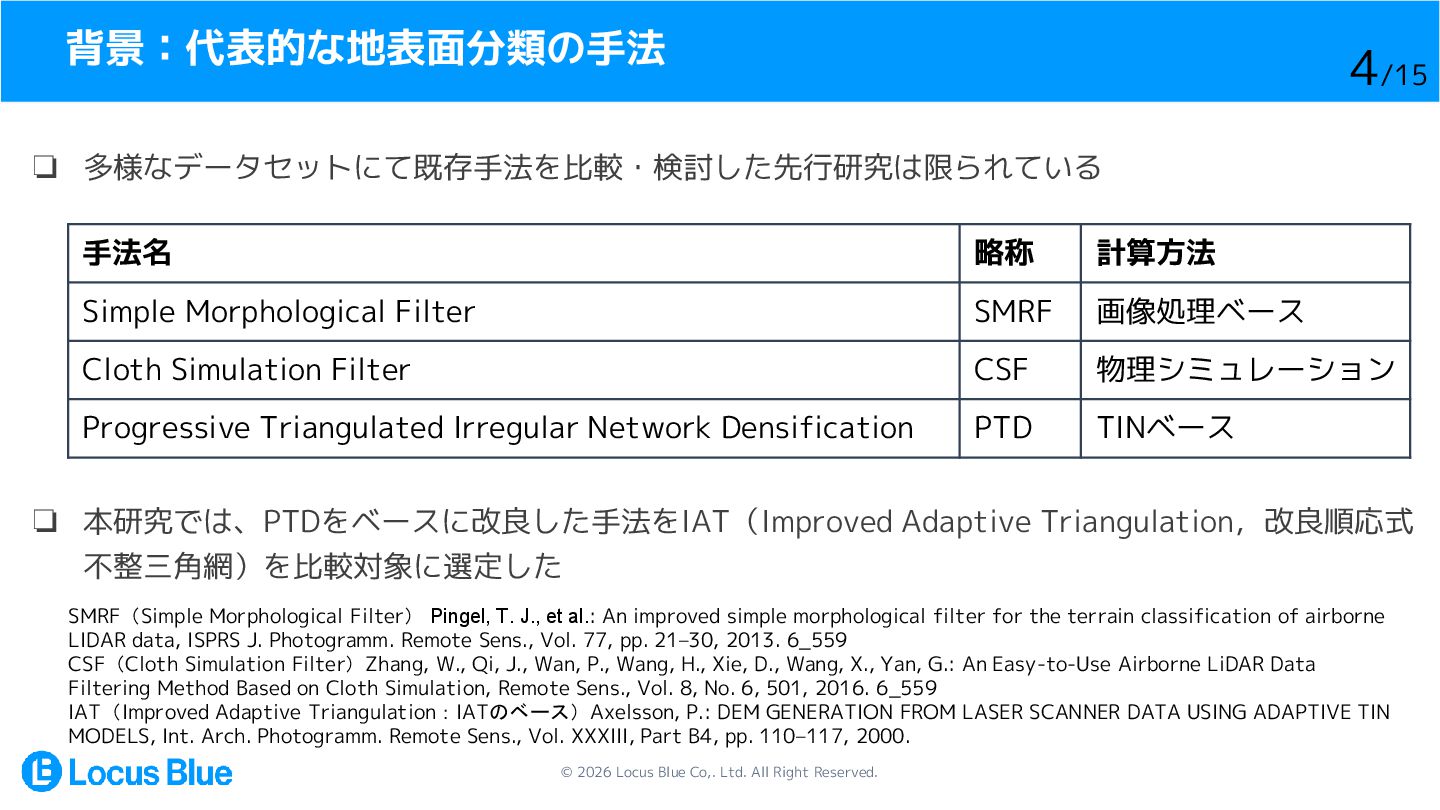
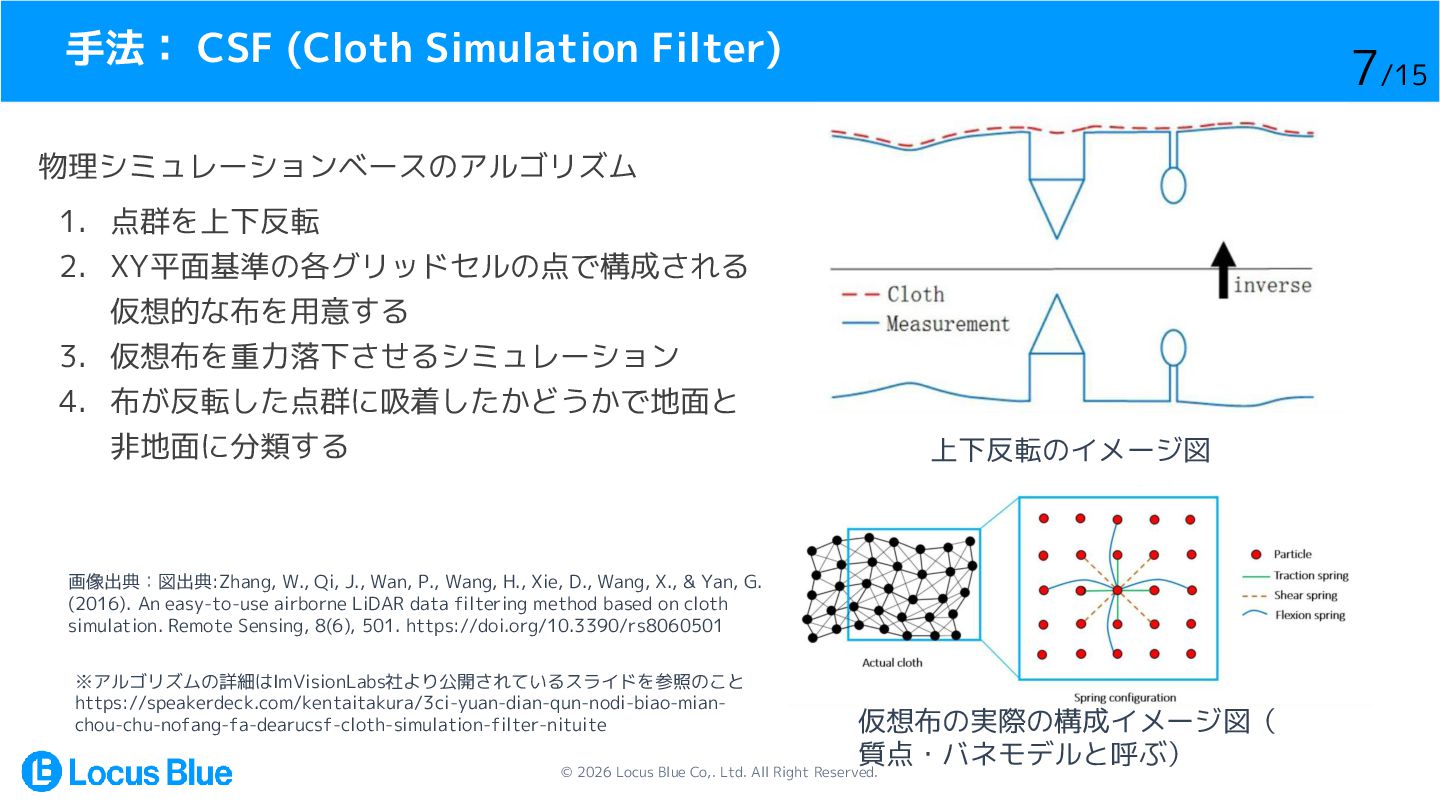
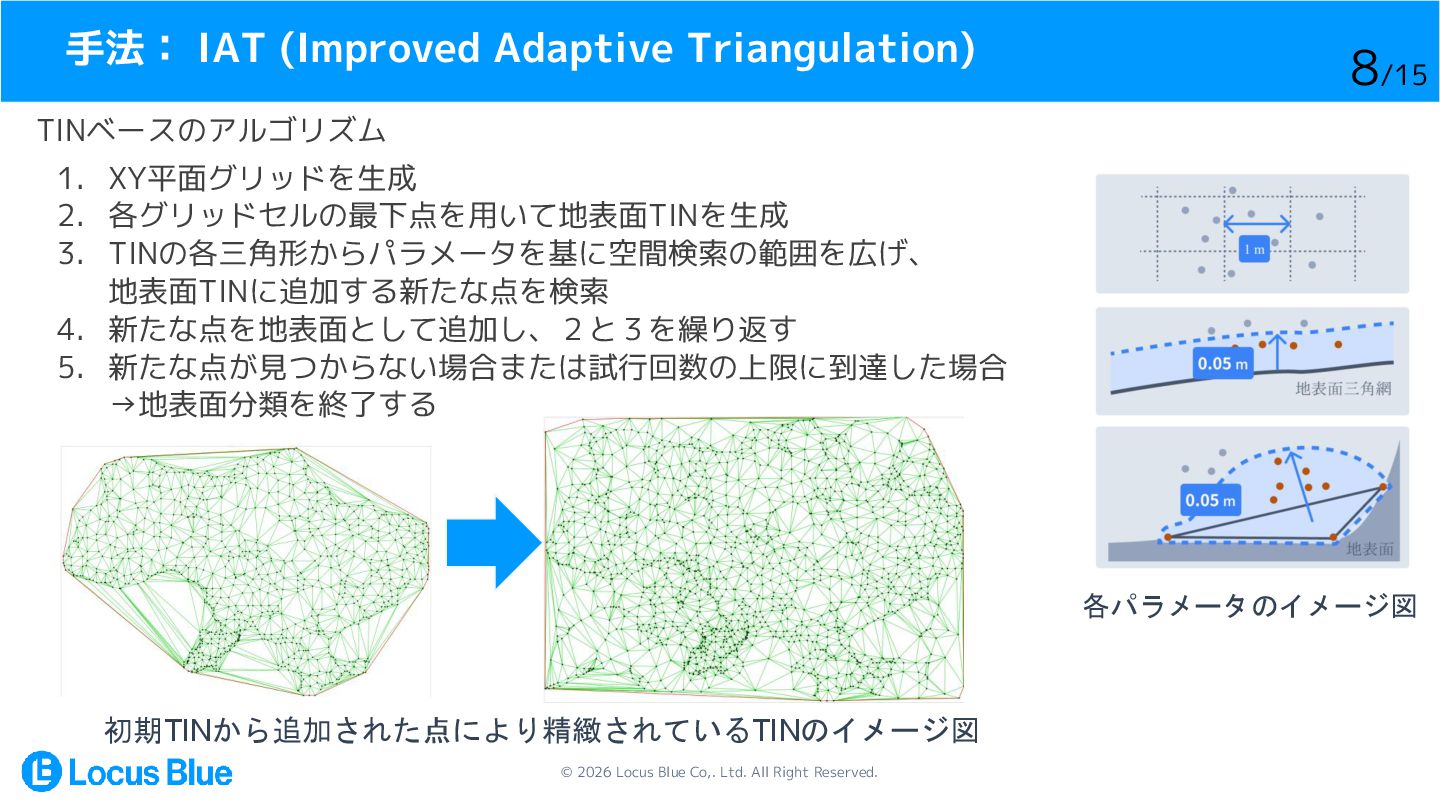
❏ 多様なデータセットにて既存手法を比較・検討した先行研究は限られている SMRF(Simple Morphological Filter) Pingel, T. J., et al.: An improved simple morphological filter for the terrain classification of airborne LIDAR data, ISPRS J. Photogramm. Remote Sens., Vol. 77, pp. 21–30, 2013. 6_559 CSF(Cloth Simulation Filter)Zhang, W., Qi, J., Wan, P., Wang, H., Xie, D., Wang, X., Yan, G.: An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation, Remote Sens., Vol. 8, No. 6, 501, 2016. 6_559 IAT(Improved Adaptive Triangulation:IATのベース)Axelsson, P.: DEM GENERATION FROM LASER SCANNER DATA USING ADAPTIVE TIN MODELS, Int. Arch. Photogramm. Remote Sens., Vol. XXXIII, Part B4, pp. 110–117, 2000. ❏ 本研究では、PTDをベースに改良した手法をIAT(Improved Adaptive Triangulation,改良順応式 不整三角網)を比較対象に選定した 手法名 略称 計算方法 Simple Morphological Filter SMRF 画像処理ベース Cloth Simulation Filter CSF 物理シミュレーション Progressive Triangulated Irregular Network Densification PTD TINベース 4/15
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}