Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
レイトレ合宿6 xyz-renderer
Search
xyz600
September 04, 2018
Programming
1.3k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
レイトレ合宿6 xyz-renderer
レイトレ合宿6 で発表した資料
xyz600
September 04, 2018
Other Decks in Programming
See All in Programming
20260623_Loop Engineeringで自分の分身の問い合わせBotを作る
ryugen04
0
190
Vite+ Unified Toolchain for the Web
naokihaba
0
730
AI時代の仕事技芸論〜ソフトウェア開発で「遊ぶように働く」職人的熟達のすすめ(スクフェス仙台 2026バージョン)
kuranuki
0
540
鹿野さんに聞く!『TypeScriptコードレシピ集』で磨く実践力
tonkotsuboy_com
4
1k
LLM本来の能力を解き放つサンドボックス技術とAI民主化への適用
yukukotani
3
4.9k
【やさしく解説 設計編・中級 #1】一つの車に、運転手は一人 ~ある倉庫システムの事例から~
panda728
PRO
0
130
1B+ /day規模のログを管理する技術
broadleaf
0
130
Webフレームワークの ベンチマークについて
yusukebe
0
200
SLOをサービス品質の共通言語にするために 取り組んできたこと
wakana0222
0
450
霧の中の代数的エフェクト
funnyycat
1
320
Embedded SREと共に達成した会員管理システムのAWS移行 - SRE NEXT 2026 ランチスポンサーセッション
niftycorp
PRO
0
2.1k
【SRE NEXT 2026 Lunch Session】一人目専任SREの立ち上げを加速する ― AIと進めたオンボーディングで2分を0.04秒にした話
pkshadeck
PRO
0
2.1k
Featured
See All Featured
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
<Decoding/> the Language of Devs - We Love SEO 2024
nikkihalliwell
1
270
The Language of Interfaces
destraynor
162
27k
ピンチをチャンスに:未来をつくるプロダクトロードマップ #pmconf2020
aki_iinuma
128
56k
Building Better People: How to give real-time feedback that sticks.
wjessup
370
20k
Cheating the UX When There Is Nothing More to Optimize - PixelPioneers
stephaniewalter
287
14k
We Have a Design System, Now What?
morganepeng
55
8.2k
職位にかかわらず全員がリーダーシップを発揮するチーム作り / Building a team where everyone can demonstrate leadership regardless of position
madoxten
63
55k
How to build an LLM SEO readiness audit: a practical framework
nmsamuel
1
800
YesSQL, Process and Tooling at Scale
rocio
174
15k
Amusing Abliteration
ianozsvald
1
220
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
Transcript
レイトレ合宿6 xyz-renderer Yuichi Sayama @xyz600600
やりたかったこと • オブジェクトをたくさん配置したい ◦ なんかかっこいい • シーンを自分で考えてみたい ◦ なんか楽しそう •
みんながやらなさそうな工夫を入れてみたい ◦ 独自性的なあれ • 高速化したい ◦ ノイズが目立たなくなる程度には
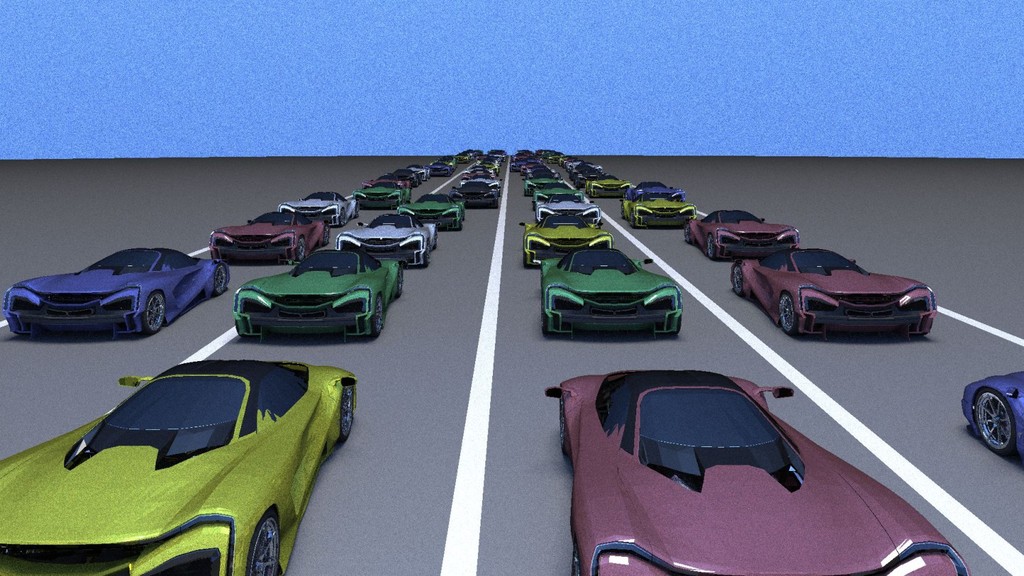
最終的に出来た絵
None
思ったよりリアルにならない…?? • もうちょい工夫の余地はあったはずだが、時間が足りずに断念 ◦ テクスチャ を単色以外にする ◦ BRDF の変更 ◦
車の種類を増やす • リアルなシーンに重要なことを知りたい • 画像の詳細 ◦ 1920 x 1080 ◦ 本番環境で 約200spp
工夫したこと 1. オブジェクトのClone 2. 2段BVH 3. MIS 付きのNext Event Estimation
4. 並列化方法
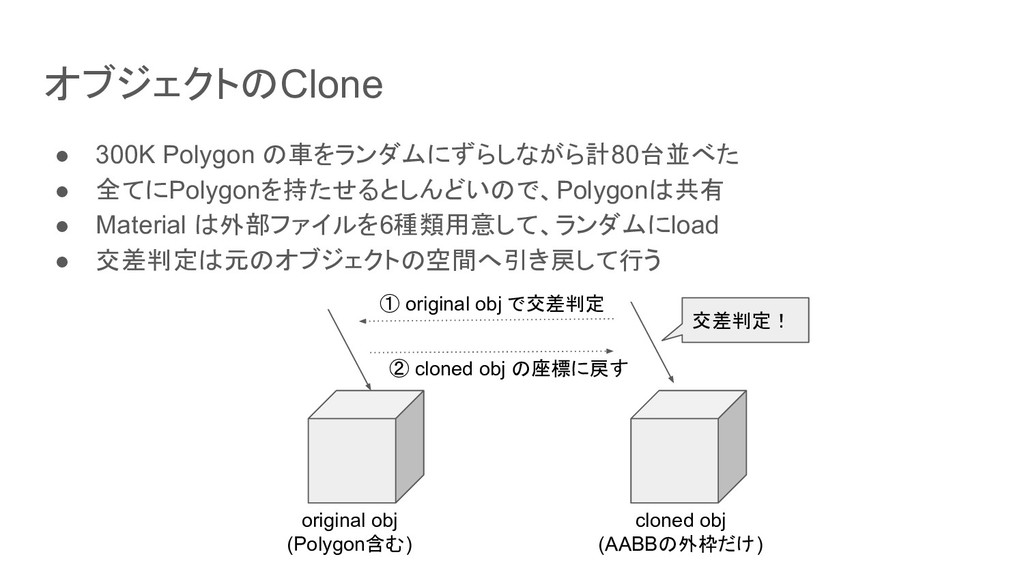
オブジェクトのClone • 300K Polygon の車をランダムにずらしながら計80台並べた • 全てにPolygonを持たせるとしんどいので、Polygonは共有 • Material は外部ファイルを6種類用意して、ランダムにload
• 交差判定は元のオブジェクトの空間へ引き戻して行う original obj (Polygon含む) ① original obj で交差判定 cloned obj (AABBの外枠だけ) ② cloned obj の座標に戻す 交差判定!
2段BVH • Clone されるオブジェクトが増えてきたので、BVHを2種類作った ◦ Objectの外枠のAABB+Polygonでない物体用 ◦ Polygon専用 • 実装はほとんど流用できるようにした
◦ 方法は「Bounding Volume Hierarchy (BVH) の実装 - 構築編」と同じ
MIS 付きのNext Event Estimation • CEDEC 2015 のBDPT 基礎資料[1]を参考にした •
最初は意味わからなくて敬遠してたけど、唐突に理解出来たので使った • 双方向パストレ、MLT は実装つらそう ◦ 来年こそは…! [1] https://www.slideshare.net/takahiroharada/introduction-to-bidirectional-path-tracing-bdpt-implementation-using-opencl-cedec-2015
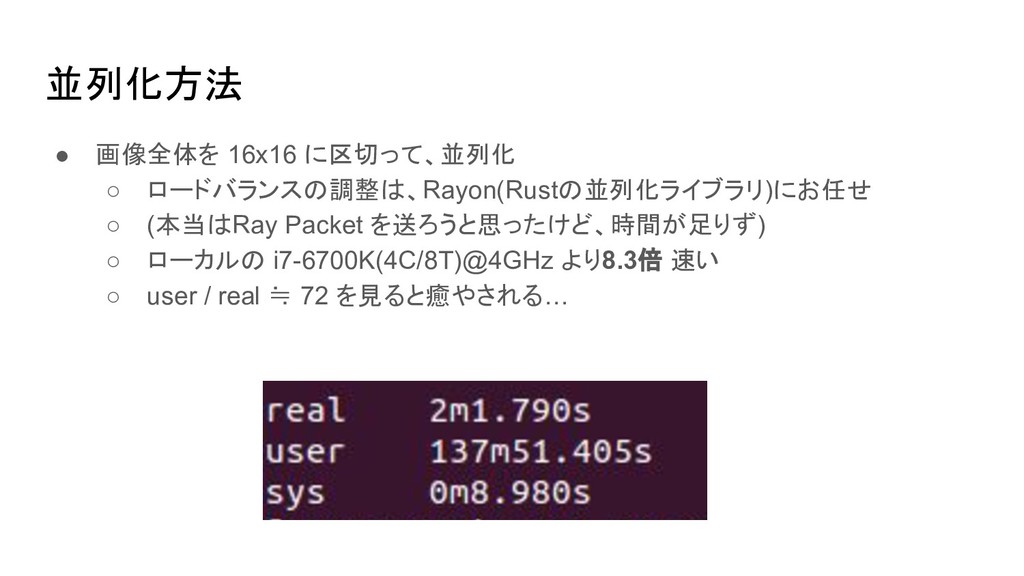
並列化方法 • 画像全体を 16x16 に区切って、並列化 ◦ ロードバランスの調整は、Rayon(Rustの並列化ライブラリ)にお任せ ◦ (本当はRay Packet
を送ろうと思ったけど、時間が足りず) ◦ ローカルの i7-6700K(4C/8T)@4GHz より8.3倍 速い ◦ user / real ≒ 72 を見ると癒やされる…
やり残したこと • SIMD化 ◦ パーツとしては実装したけど、きちんと組み込むための時間が足りず • 双方向パストレ、MLT等の強いアルゴリズム実装 • 被写界深度 ◦
実装したけど、シーンがイマイチだったので却下
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![MIS 付きのNext Event Estimation • CEDEC 2015 のBDPT 基礎資料[1]を参考にした •](https://files.speakerdeck.com/presentations/a9cdfa9dd3974f68beffb99ebe5ba3db/slide_8.jpg){kind=link}
{kind=link}
{kind=link}