Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ロボットハンドの調査・自作
Search
hygradme
February 19, 2025
340
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ロボットハンドの調査・自作
hygradme
February 19, 2025
More Decks by hygradme
See All by hygradme
UFACTORY Lite 6用リーダーフォロワーシステムの作成
hygradme
0
1.2k
RealSense T265とD415とUFACTORY Lite 6で模倣学習の実験
hygradme
0
940
Featured
See All Featured
Lessons Learnt from Crawling 1000+ Websites
charlesmeaden
PRO
1
1.4k
SERP Conf. Vienna - Web Accessibility: Optimizing for Inclusivity and SEO
sarafernandez
2
1.5k
sira's awesome portfolio website redesign presentation
elsirapls
0
300
How People are Using Generative and Agentic AI to Supercharge Their Products, Projects, Services and Value Streams Today
helenjbeal
1
240
4 Signs Your Business is Dying
shpigford
187
22k
Designing for Timeless Needs
cassininazir
1
380
Gemini Prompt Engineering: Practical Techniques for Tangible AI Outcomes
mfonobong
2
460
Design and Strategy: How to Deal with People Who Don’t "Get" Design
morganepeng
133
19k
Between Models and Reality
mayunak
4
380
HU Berlin: Industrial-Strength Natural Language Processing with spaCy and Prodigy
inesmontani
PRO
0
540
Avoiding the “Bad Training, Faster” Trap in the Age of AI
tmiket
0
190
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
56k
Transcript
ロボットハンドの調査・自作 2025/2/19 第3回OpenArm勉強会
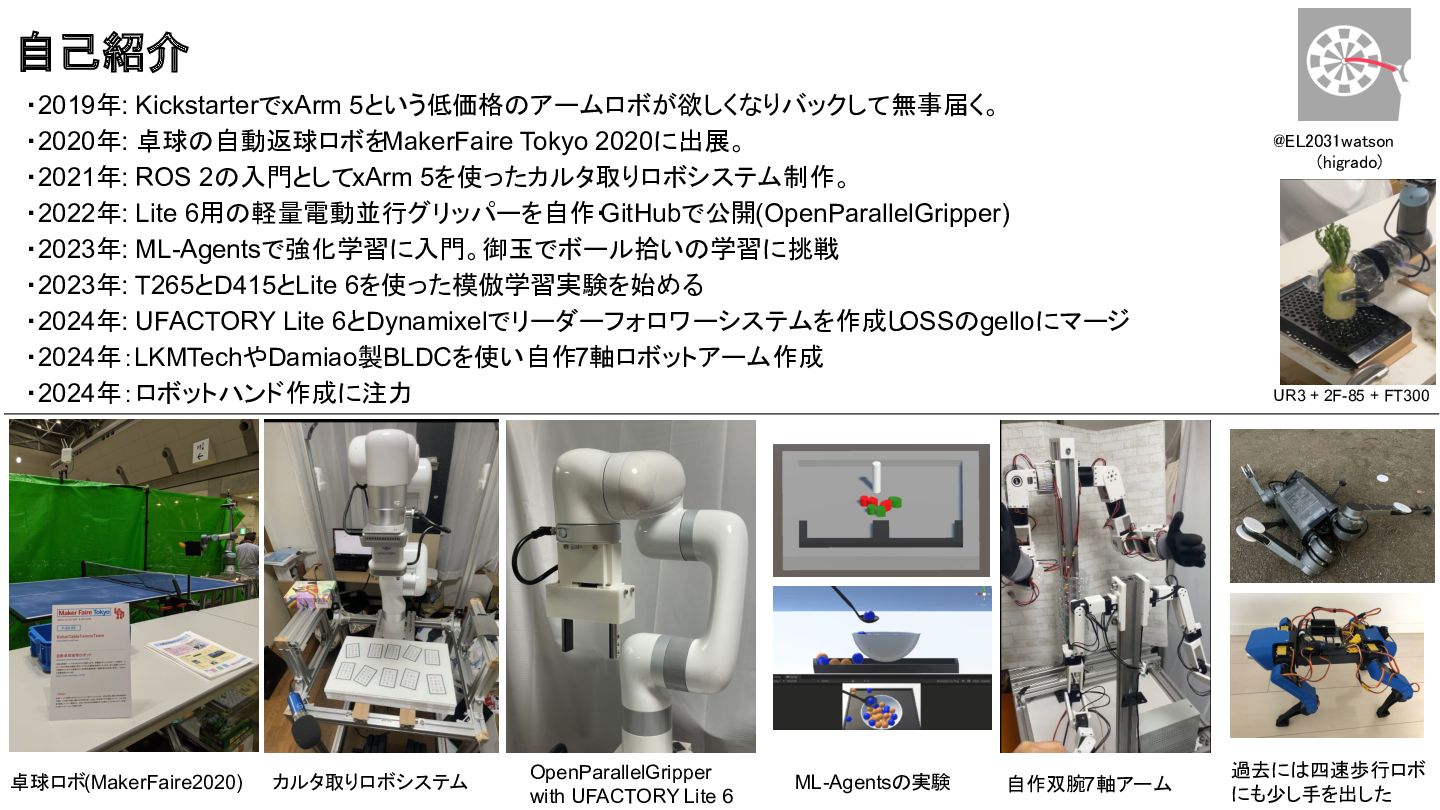
・2019年: KickstarterでxArm 5という低価格のアームロボが欲しくなりバックして無事届く。 ・2020年: 卓球の自動返球ロボをMakerFaire Tokyo 2020に出展。 ・2021年: ROS 2の入門としてxArm
5を使ったカルタ取りロボシステム制作。 ・2022年: Lite 6用の軽量電動並行グリッパーを自作・ GitHubで公開(OpenParallelGripper) ・2023年: ML-Agentsで強化学習に入門。御玉でボール拾いの学習に挑戦 ・2023年: T265とD415とLite 6を使った模倣学習実験を始める ・2024年: UFACTORY Lite 6とDynamixelでリーダーフォロワーシステムを作成し OSSのgelloにマージ ・2024年:LKMTechやDamiao製BLDCを使い自作7軸ロボットアーム作成 ・2024年:ロボットハンド作成に注力 @EL2031watson (higrado) 過去には四速歩行ロボ にも少し手を出した 卓球ロボ(MakerFaire2020) 自己紹介 カルタ取りロボシステム 自作双腕7軸アーム OpenParallelGripper with UFACTORY Lite 6 ML-Agentsの実験 UR3 + 2F-85 + FT300
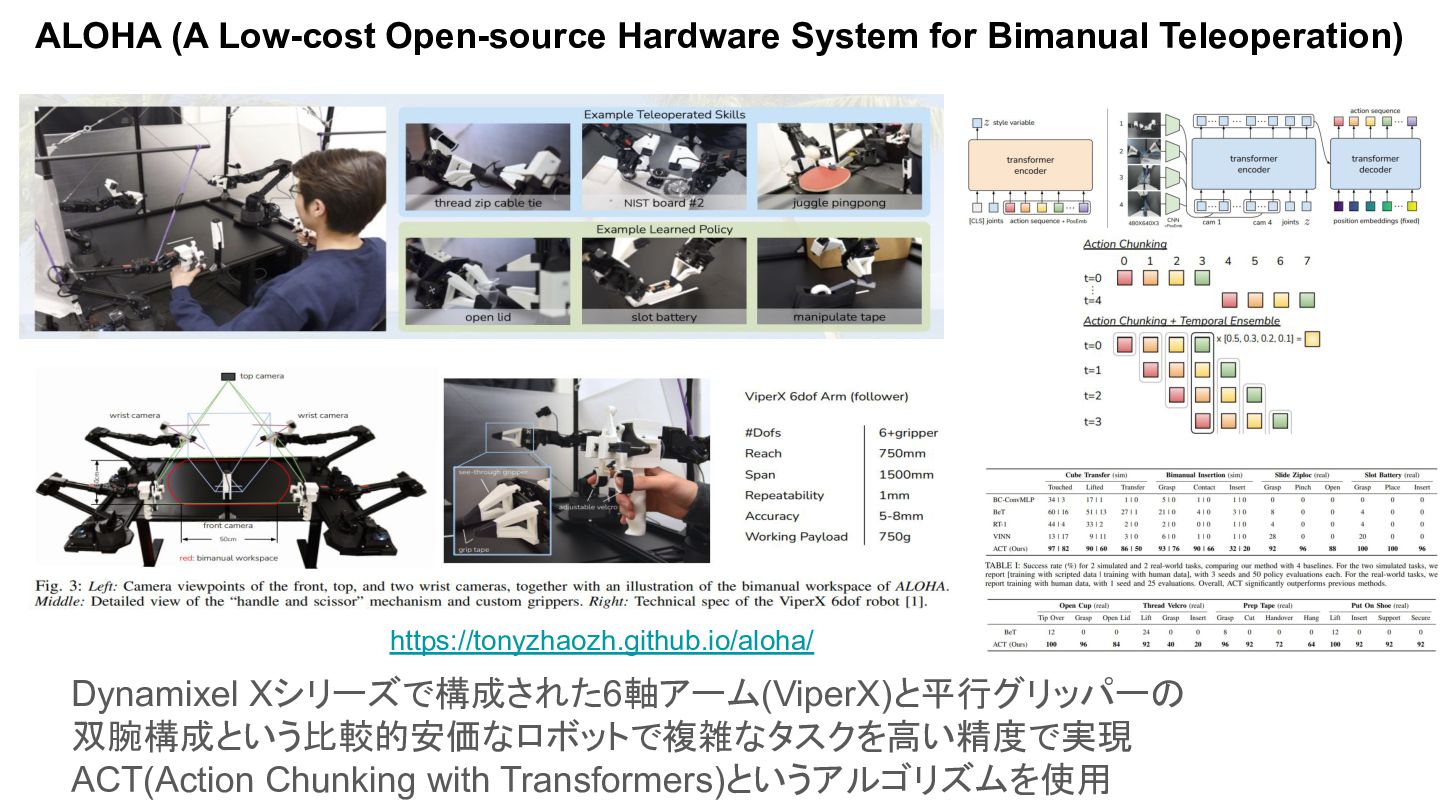
https://tonyzhaozh.github.io/aloha/ Dynamixel Xシリーズで構成された6軸アーム(ViperX)と平行グリッパーの 双腕構成という比較的安価なロボットで複雑なタスクを高い精度で実現 ACT(Action Chunking with Transformers)というアルゴリズムを使用 ALOHA (A
Low-cost Open-source Hardware System for Bimanual Teleoperation)
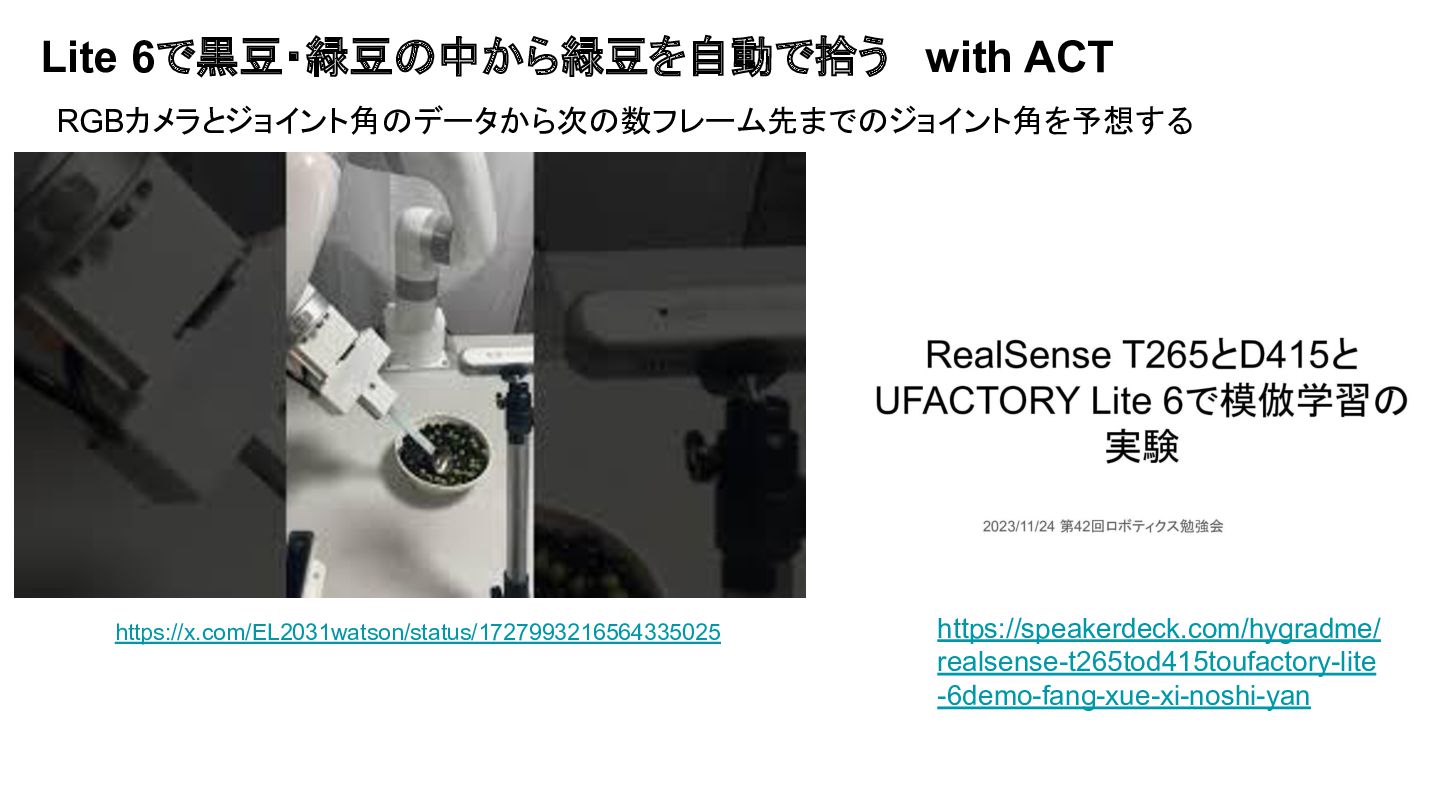
Lite 6で黒豆・緑豆の中から緑豆を自動で拾う with ACT https://x.com/EL2031watson/status/1727993216564335025 RGBカメラとジョイント角のデータから次の数フレーム先までのジョイント角を予想する https://speakerdeck.com/hygradme/ realsense-t265tod415toufactory-lite -6demo-fang-xue-xi-noshi-yan
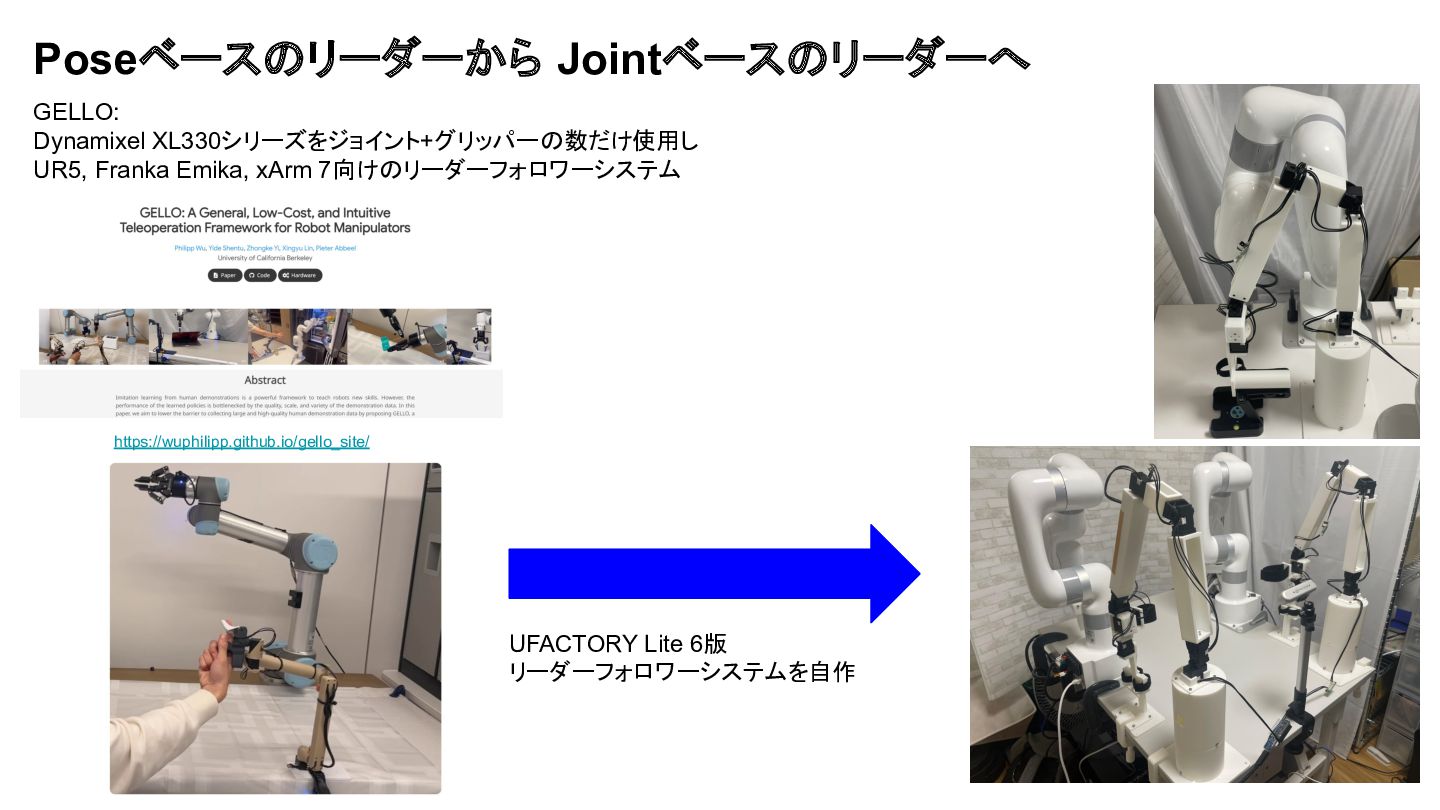
Poseベースのリーダーから Jointベースのリーダーへ https://wuphilipp.github.io/gello_site/ GELLO: Dynamixel XL330シリーズをジョイント+グリッパーの数だけ使用し UR5, Franka Emika, xArm
7向けのリーダーフォロワーシステム UFACTORY Lite 6版 リーダーフォロワーシステムを自作
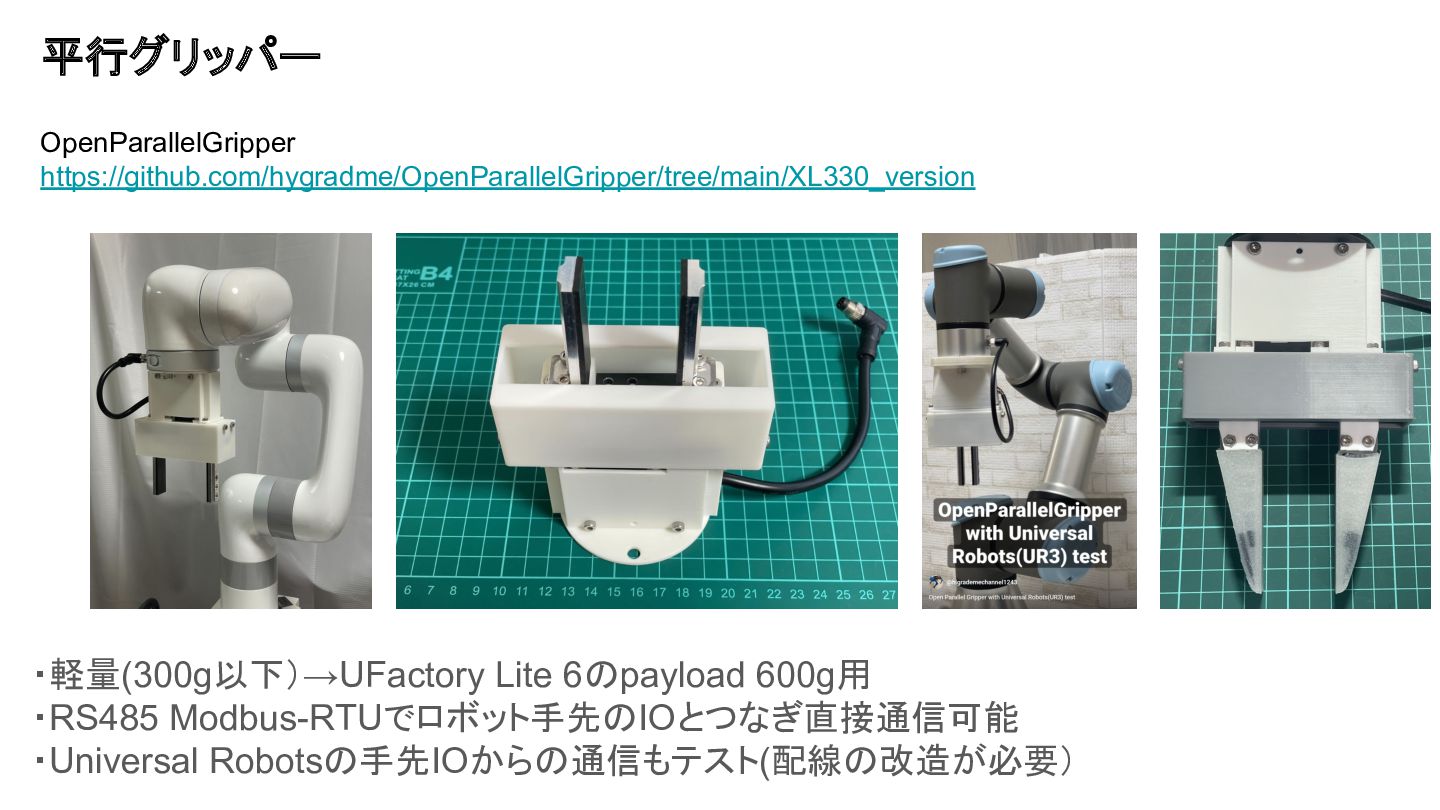
平行グリッパー OpenParallelGripper https://github.com/hygradme/OpenParallelGripper/tree/main/XL330_version ・軽量(300g以下)→UFactory Lite 6のpayload 600g用 ・RS485 Modbus-RTUでロボット手先のIOとつなぎ直接通信可能 ・Universal
Robotsの手先IOからの通信もテスト(配線の改造が必要)
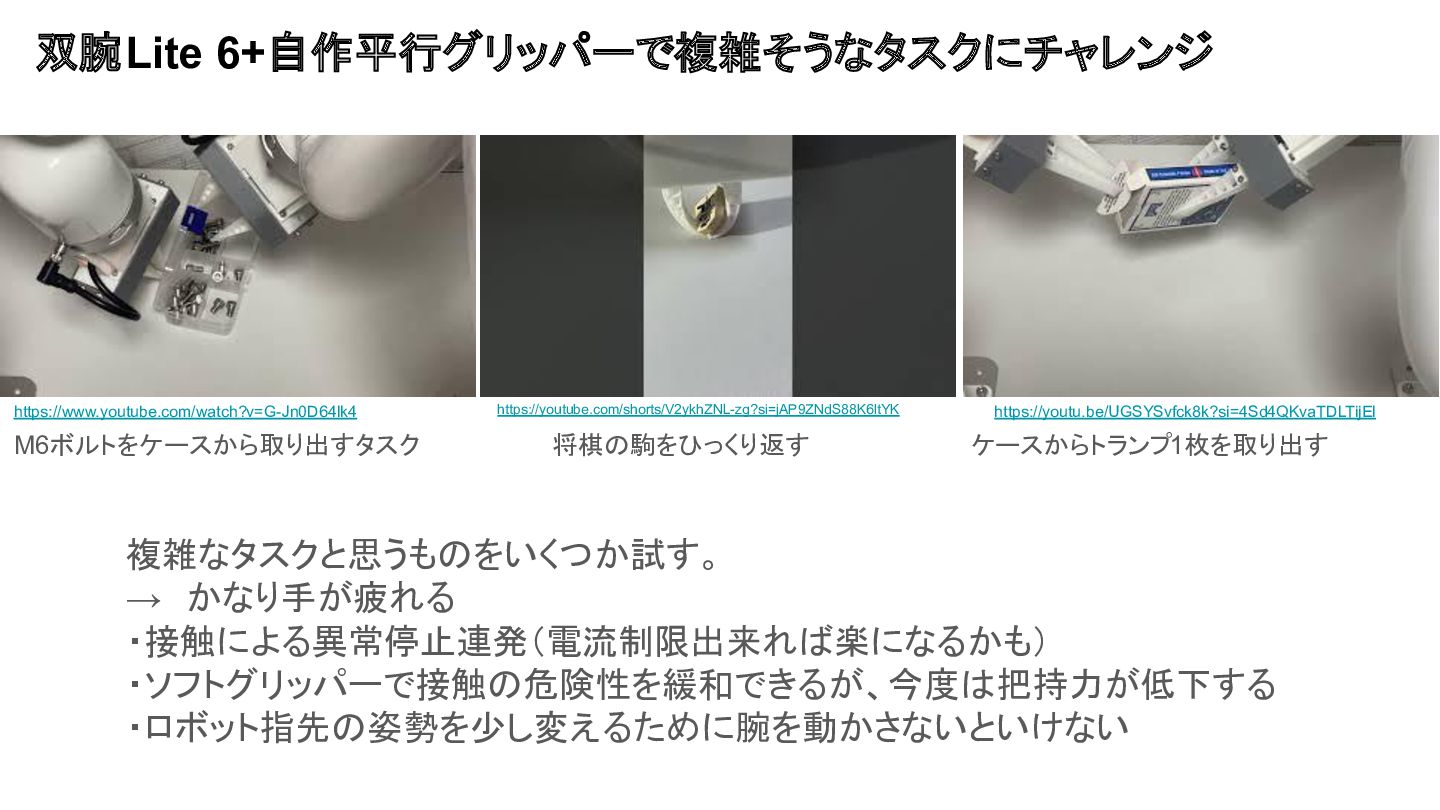
複雑なタスクと思うものをいくつか試す。 → かなり手が疲れる ・接触による異常停止連発(電流制限出来れば楽になるかも) ・ソフトグリッパーで接触の危険性を緩和できるが、今度は把持力が低下する ・ロボット指先の姿勢を少し変えるために腕を動かさないといけない https://www.youtube.com/watch?v=G-Jn0D64lk4 M6ボルトをケースから取り出すタスク 双腕Lite 6+自作平行グリッパーで複雑そうなタスクにチャレンジ 将棋の駒をひっくり返す
ケースからトランプ1枚を取り出す https://youtube.com/shorts/V2ykhZNL-zg?si=jAP9ZNdS88K6ltYK https://youtu.be/UGSYSvfck8k?si=4Sd4QKvaTDLTijEl
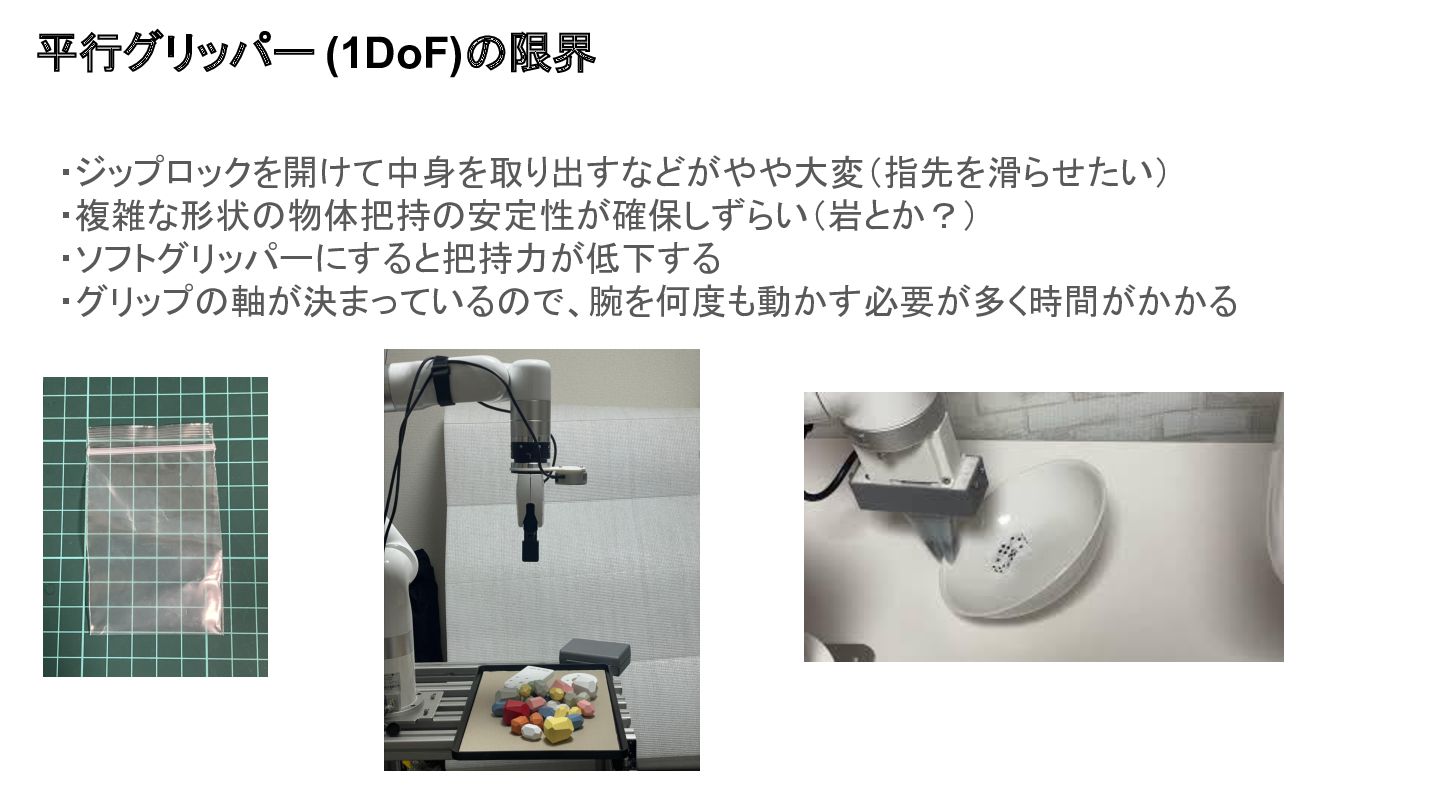
・ジップロックを開けて中身を取り出すなどがやや大変(指先を滑らせたい) ・複雑な形状の物体把持の安定性が確保しずらい(岩とか?) ・ソフトグリッパーにすると把持力が低下する ・グリップの軸が決まっているので、腕を何度も動かす必要が多く時間がかかる 平行グリッパー (1DoF)の限界
なかなかお高めのラインナップ 4-5指グリッパー Shadow Dexterous Hand(Shadow Robot) 20DoF 2000万円超? https://www.shadowrobot.com/dexterous-hand-series/ Allegro
Hand(Wonik Robotics) 16DoF 400万円超? https://www.allegrohand.com/ SVH(SCHUNK) 9DoF 600万円超? https://schunk.com/de/en/gripping-systems/special-grip per/svh/c/PGR_3161
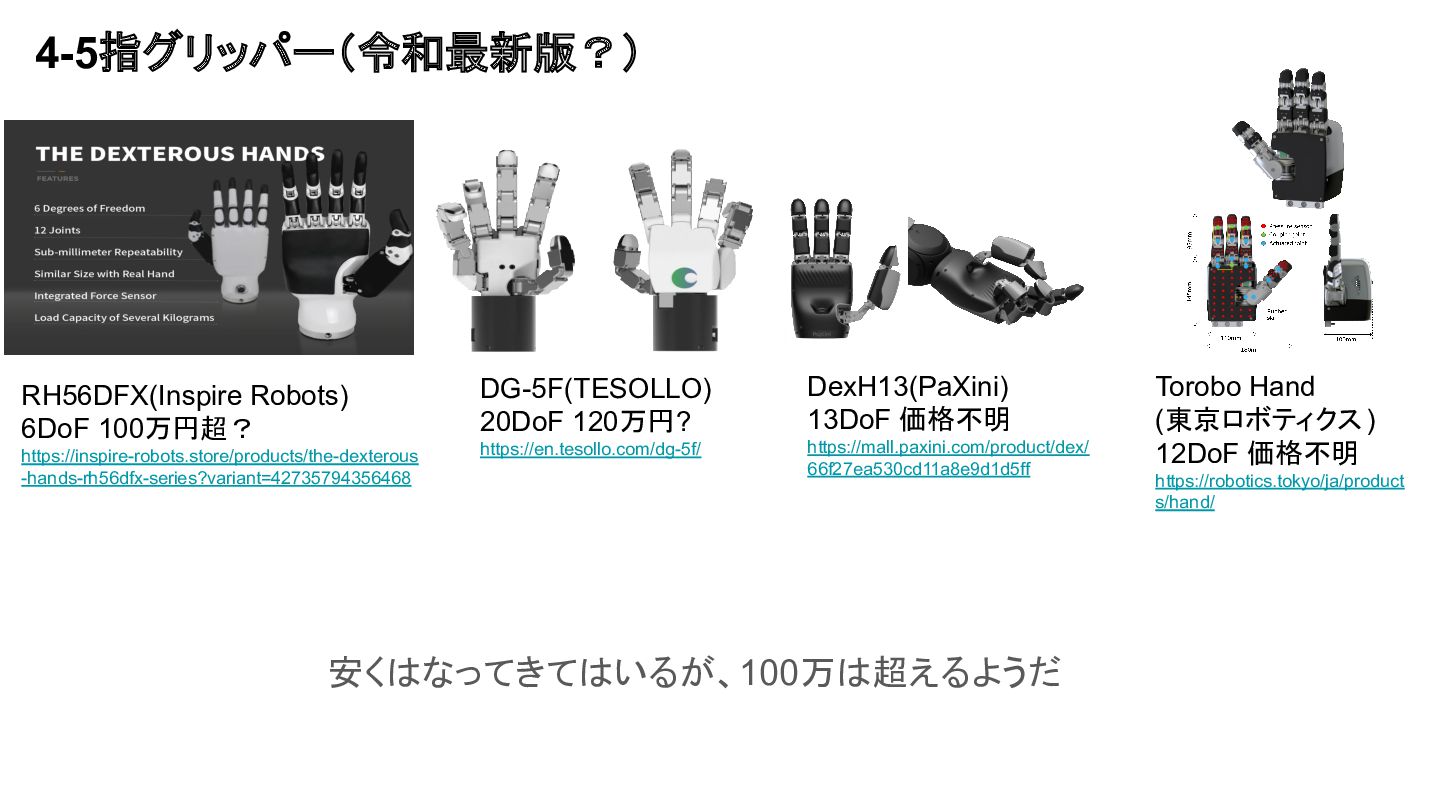
安くはなってきてはいるが、100万は超えるようだ 4-5指グリッパー(令和最新版?) RH56DFX(Inspire Robots) 6DoF 100万円超? https://inspire-robots.store/products/the-dexterous -hands-rh56dfx-series?variant=42735794356468 DG-5F(TESOLLO) 20DoF
120万円? https://en.tesollo.com/dg-5f/ DexH13(PaXini) 13DoF 価格不明 https://mall.paxini.com/product/dex/ 66f27ea530cd11a8e9d1d5ff Torobo Hand (東京ロボティクス) 12DoF 価格不明 https://robotics.tokyo/ja/product s/hand/
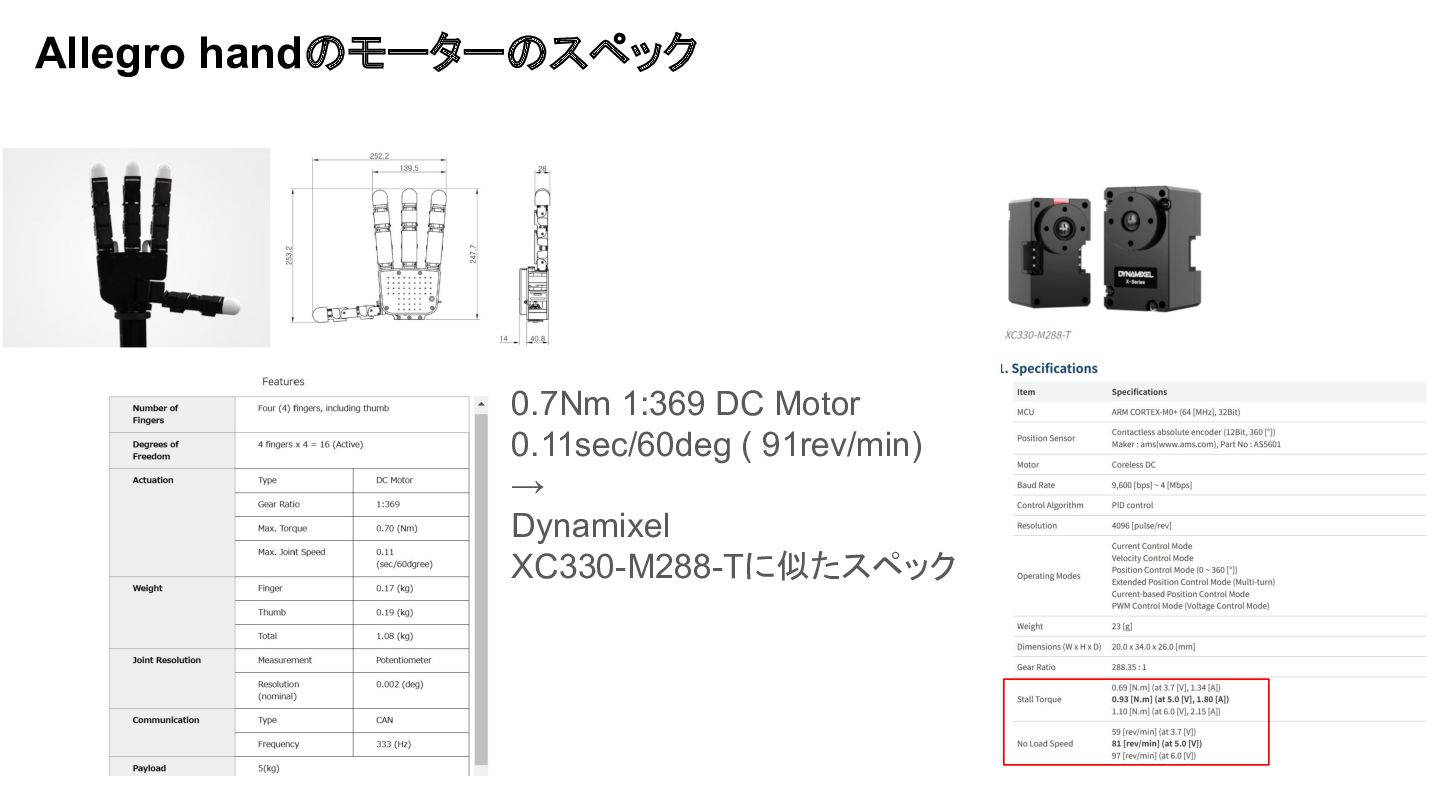
0.7Nm 1:369 DC Motor 0.11sec/60deg ( 91rev/min) → Dynamixel XC330-M288-Tに似たスペック
Allegro handのモーターのスペック
使用するサーボ、自由度によって4万-100万円超の差が出てくる 4-5指グリッパー(オープンソース or 論文) LEAP Hand(CMU) 16DoF 8-25万円 →XC330-M288-Tを使用 https://v1.leaphand.com/
https://www.youtube.com/watch?v=VKAl JPypQFI ILDA Hand(lir LAB) 15DoF 100万超? →KSSのボールねじ、maxonの DCモーター+遊星ギアを多用 https://iir.ajou.ac.kr/research https://www.youtube.com/watch?v=Ys6BiNKPohw DexHand (The Robot Studio) 16DoF 5万円? https://www.dexhand.org/ https://www.youtube.com/watch?v= ZX4Yj9SPsY8&t=25s
4-5指グリッパー製作に使えそうな部品 (サーボモータ) HLS3606M (Feetech) 23 x 12 x 27.5 [mm]
0.6Nm 111rpm 6V 20.6g 205:1 シリアルサーボ 位置・速度・電流 6000円 https://www.feetechrc.com/720955.html XC330-M288-T (Robotis) 20.0 x 34.0 x 26.0 [mm] 0.93Nm 81rpm 6V 23g 288.4:1 シリアルサーボ 位置・速度・電流 11000円 https://emanual.robotis.com/docs/en/dxl/x/ xc330-m288/ Micro Robot Servo (Orbray) 12.4 x 24.2 x 12.7 [mm] 0.2Nm 98rpm 3.7V 12g シリアルサーボ 不明 https://orbray.com/product/motor-unit/servo .html 関節軸の直接駆動方式の場合、「20mm x 20mm x 30mm」以内だと人間の指に近い? P8-R (ACTUONIX) 45 x 11 x 25 [mm] 35N-155N 6.2mm/s~30mm/s 12V 24g 50~252:1 リニアサーボ 位置 16000円 https://www.actuonix.com/P8-R-Micro-Linea r-Servo--10mm--2521--12-volts-_p_480.html
指モーションキャプチャー(カメラベース) Meta Quest 3 (Meta) 81400円 https://www.meta.com/jp/quest/quest-3/ Apple Vision Pro
(Apple) 599800円 https://www.apple.com/jp/apple-vision-pro/ Leap Motion Controller 2 (ultraleap) 44450円 https://leap2.ultraleap.com/products/leap- motion-controller-2/
指モーションキャプチャー(装着式) ContactGlove2 (Diver-X) 75000円 曲げセンサー https://diver-x.jp/products/contactglove2/ Smartgloves (Rokoko) 26-27万円 IMU?
https://www.rokoko.com/ja/products/smar tgloves Manus PRIME 3 Mocap (Manus) 407000円 曲げセンサー+IMU (上位機種はEMFも 使用) https://www.manus-meta.com/products/p rime-3-mocap Dexmo (Dexta Robotics) 100万-200万円 エンコーダー? 力覚フィードバック https://www.dextarobotics.com/
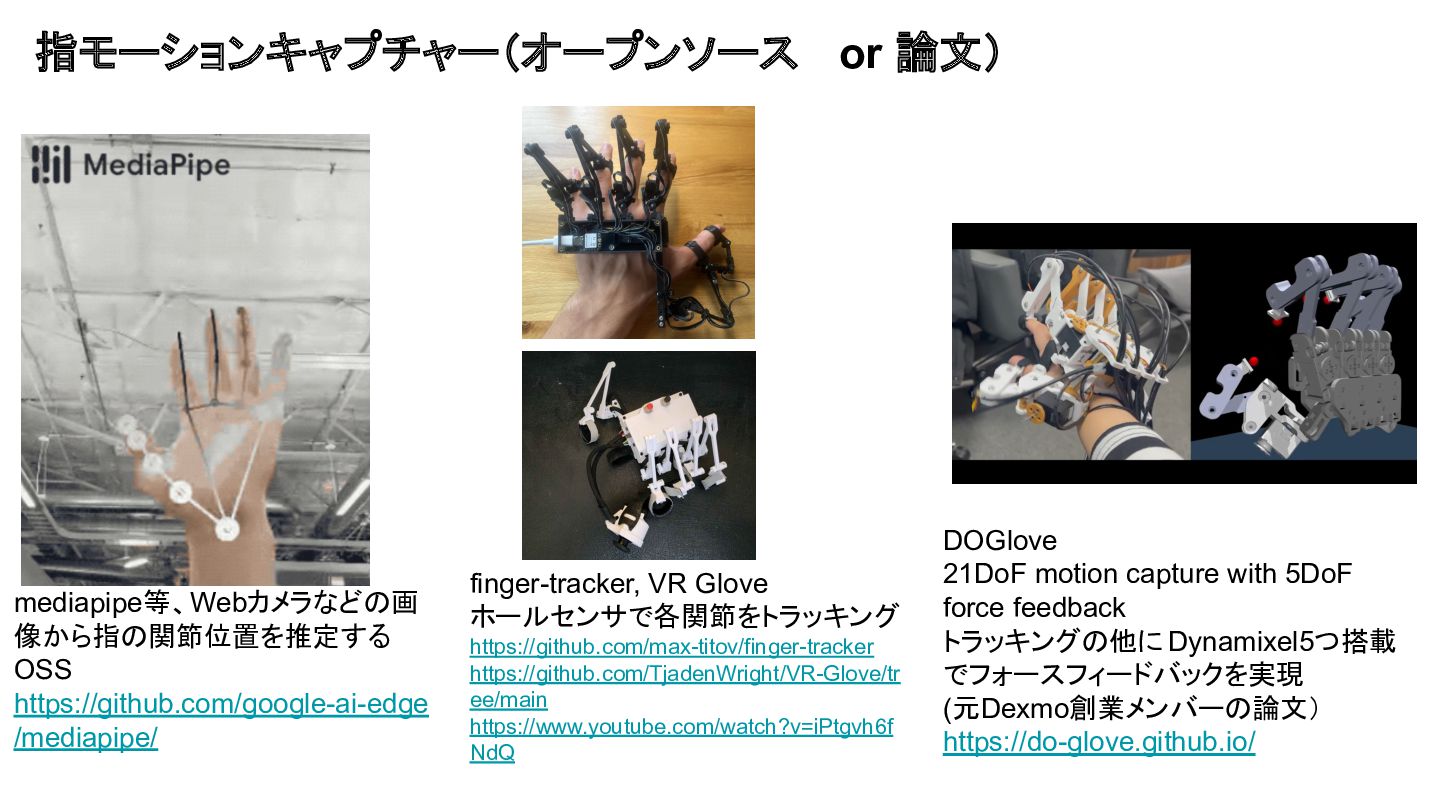
DOGlove 21DoF motion capture with 5DoF force feedback トラッキングの他にDynamixel5つ搭載 でフォースフィードバックを実現
(元Dexmo創業メンバーの論文) https://do-glove.github.io/ 指モーションキャプチャー(オープンソース or 論文) mediapipe等、Webカメラなどの画 像から指の関節位置を推定する OSS https://github.com/google-ai-edge /mediapipe/ finger-tracker, VR Glove ホールセンサで各関節をトラッキング https://github.com/max-titov/finger-tracker https://github.com/TjadenWright/VR-Glove/tr ee/main https://www.youtube.com/watch?v=iPtgvh6f NdQ
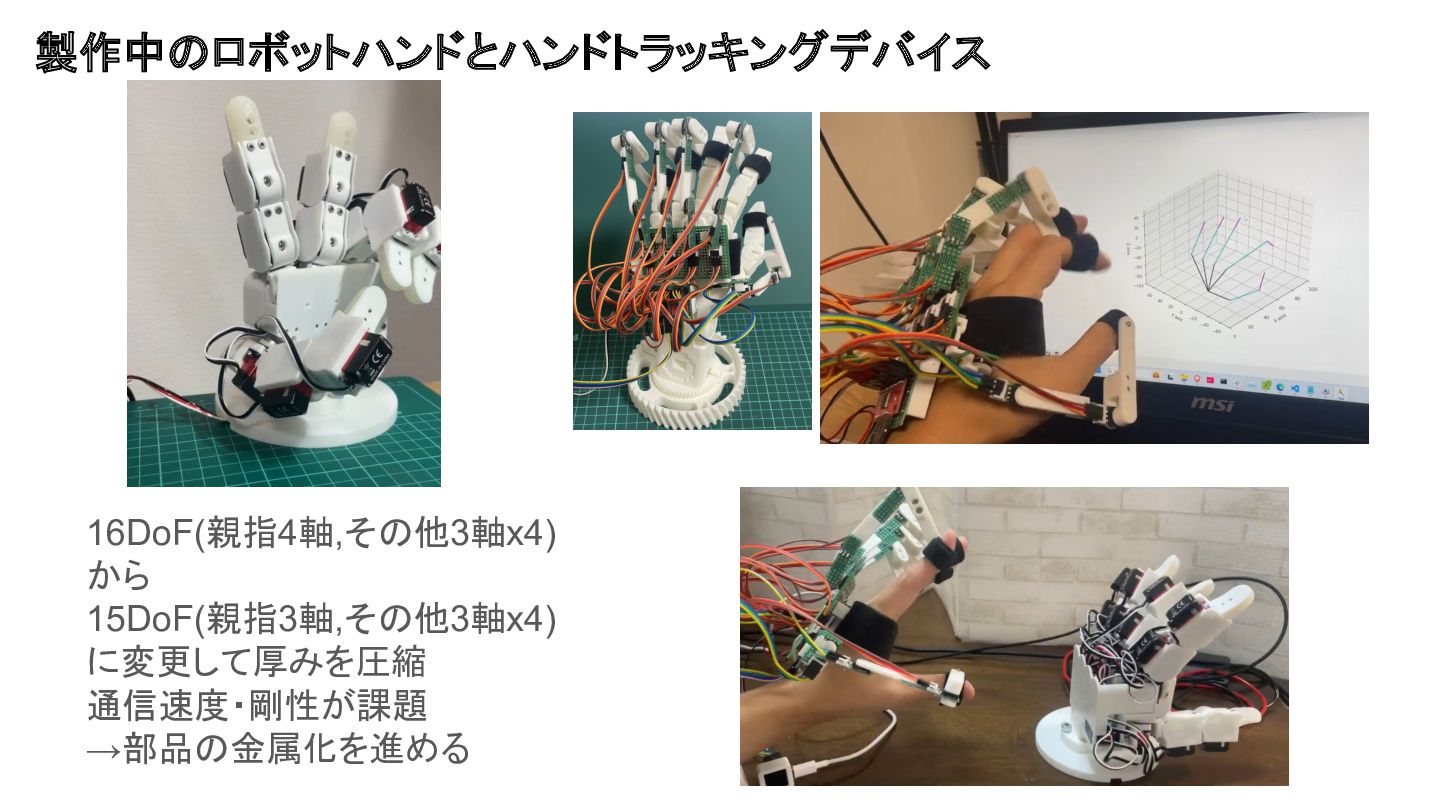
製作中のロボットハンドとハンドトラッキングデバイス 16DoF(親指4軸,その他3軸x4) から 15DoF(親指3軸,その他3軸x4) に変更して厚みを圧縮 通信速度・剛性が課題 →部品の金属化を進める
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![4-5指グリッパー製作に使えそうな部品 (サーボモータ) HLS3606M (Feetech) 23 x 12 x 27.5 [mm]](https://files.speakerdeck.com/presentations/06dc24a6a4ee4ca583c1cd2ad7e4bc1d/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}