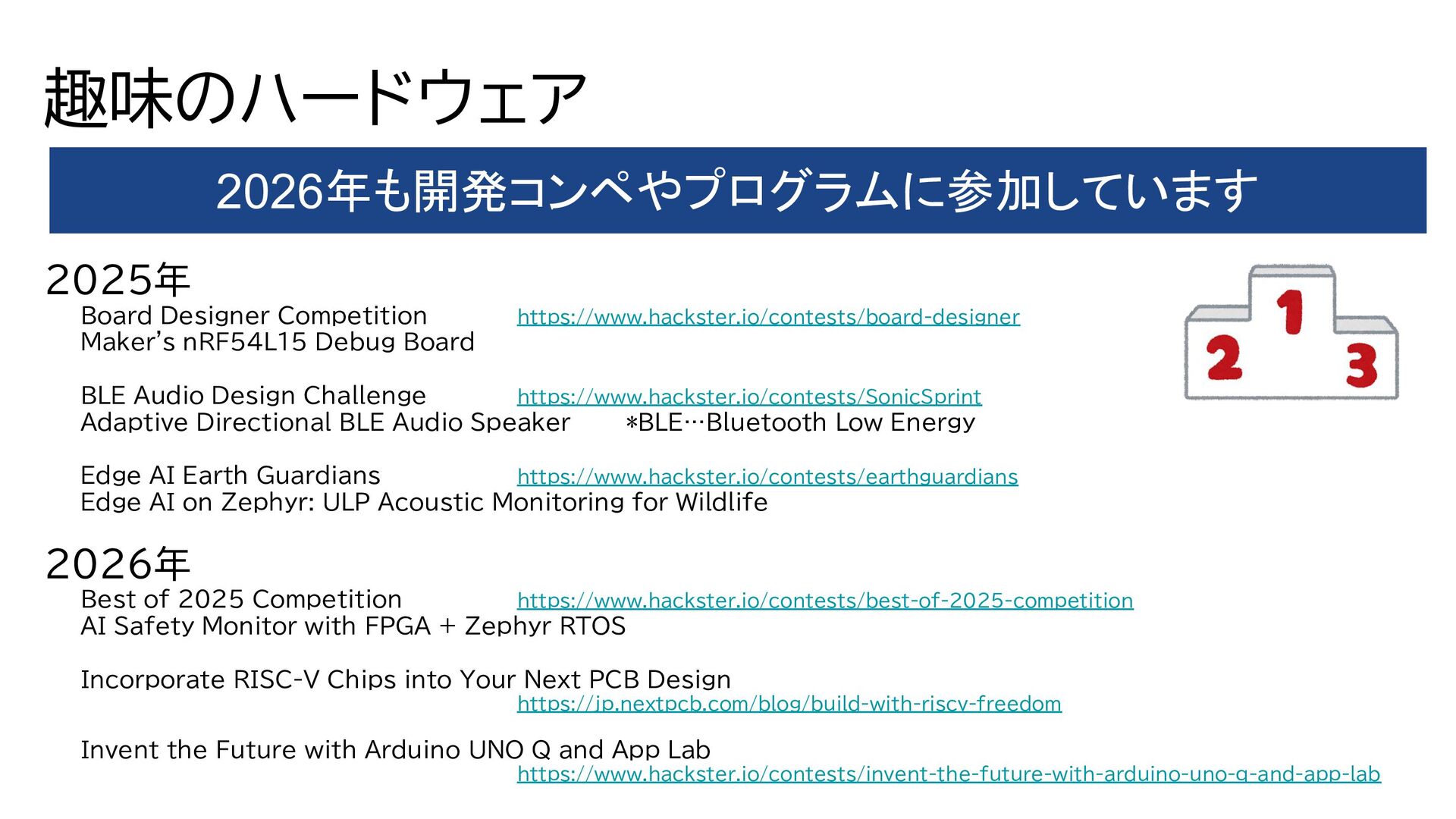
BLE Audio Design Challenge https://www.hackster.io/contests/SonicSprint Adaptive Directional BLE Audio Speaker *BLE…Bluetooth Low Energy Edge AI Earth Guardians https://www.hackster.io/contests/earthguardians Edge AI on Zephyr: ULP Acoustic Monitoring for Wildlife 2026年 Best of 2025 Competition https://www.hackster.io/contests/best-of-2025-competition AI Safety Monitor with FPGA + Zephyr RTOS Incorporate RISC-V Chips into Your Next PCB Design https://jp.nextpcb.com/blog/build-with-riscv-freedom Invent the Future with Arduino UNO Q and App Lab https://www.hackster.io/contests/invent-the-future-with-arduino-uno-q-and-app-lab 2026年も開発コンペやプログラムに参加しています
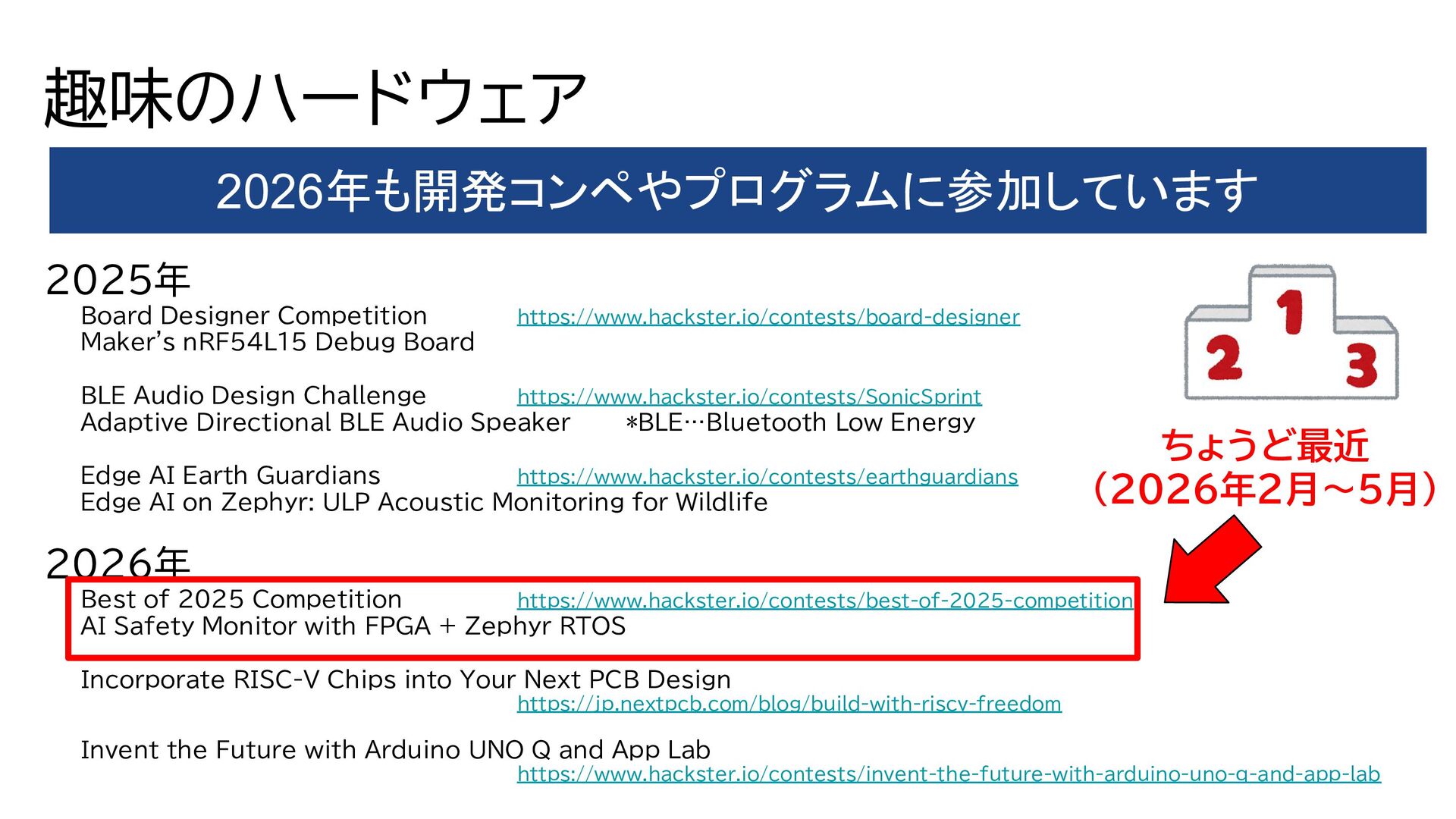
BLE Audio Design Challenge https://www.hackster.io/contests/SonicSprint Adaptive Directional BLE Audio Speaker *BLE…Bluetooth Low Energy Edge AI Earth Guardians https://www.hackster.io/contests/earthguardians Edge AI on Zephyr: ULP Acoustic Monitoring for Wildlife 2026年 Best of 2025 Competition https://www.hackster.io/contests/best-of-2025-competition AI Safety Monitor with FPGA + Zephyr RTOS Incorporate RISC-V Chips into Your Next PCB Design https://jp.nextpcb.com/blog/build-with-riscv-freedom Invent the Future with Arduino UNO Q and App Lab https://www.hackster.io/contests/invent-the-future-with-arduino-uno-q-and-app-lab 2026年も開発コンペやプログラムに参加しています ちょうど最近 (2026年2月~5月)
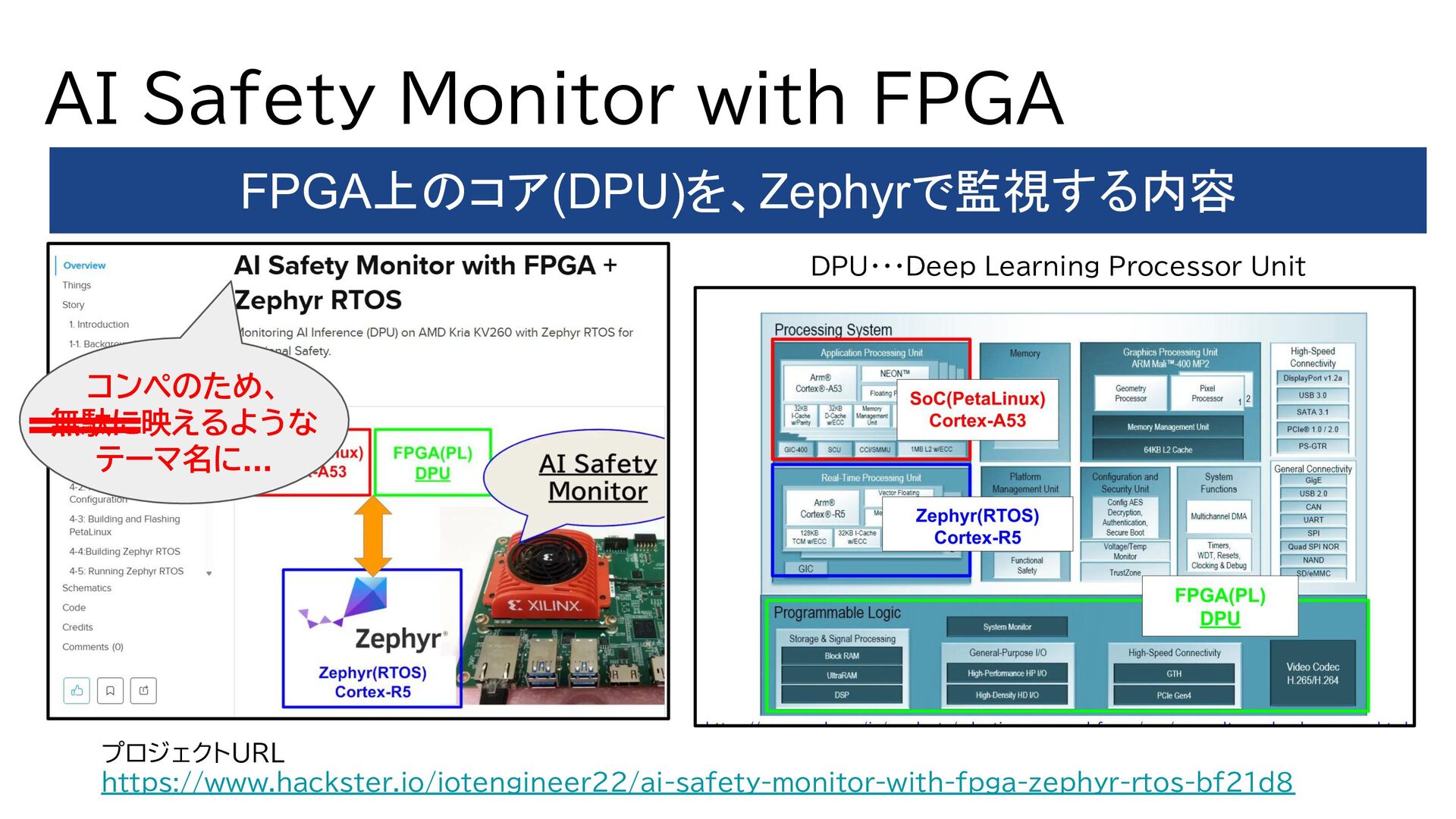
・テーマは何でもOK。2025年までに発売した指定のボードならOK。 小さめなコンテストで、テーマもかなり自由なコンペ 2026年2月~5月 Best of 2025 Competition https://www.hackster.io/contests/best-of-2025-competition AI Safety Monitor with FPGA + Zephyr RTOS 優勝しました *FPGA部門は、特に完走者が 少なかったのが一番の理由
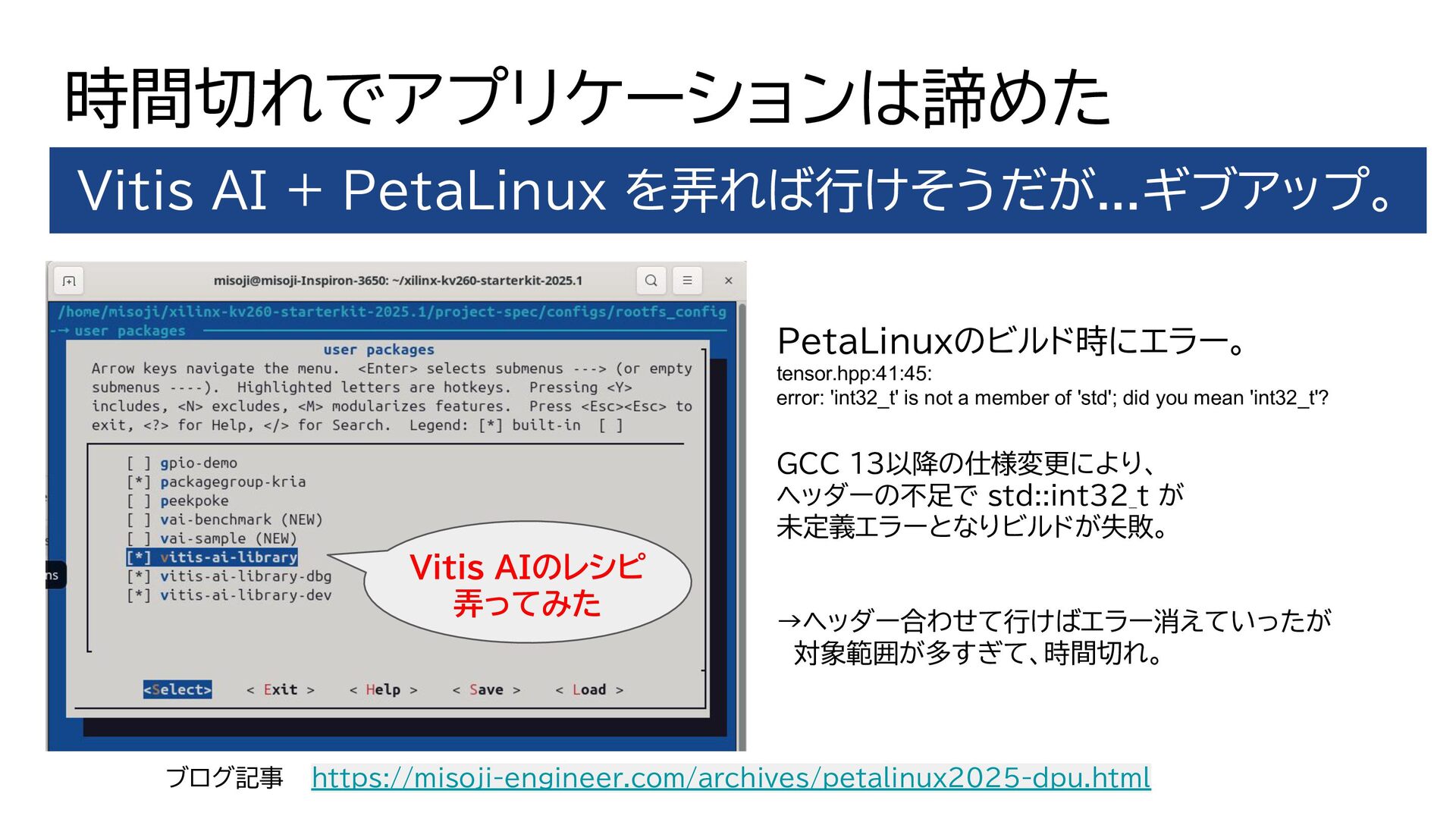
is not a member of 'std'; did you mean 'int32_t'? GCC 13以降の仕様変更により、 ヘッダーの不足で std::int32_t が 未定義エラーとなりビルドが失敗。 →ヘッダー合わせて行けばエラー消えていったが 対象範囲が多すぎて、時間切れ。 Vitis AIのレシピ 弄ってみた ブログ記事 https://misoji-engineer.com/archives/petalinux2025-dpu.html
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}