Rate Selection via Noisy-Input Gaussian Process December 2025@IEEE GLOBECOM Workshops Koya Sato, Ph.D., SMIEEE The University of Electro-Communications, Tokyo, Japan [email protected]
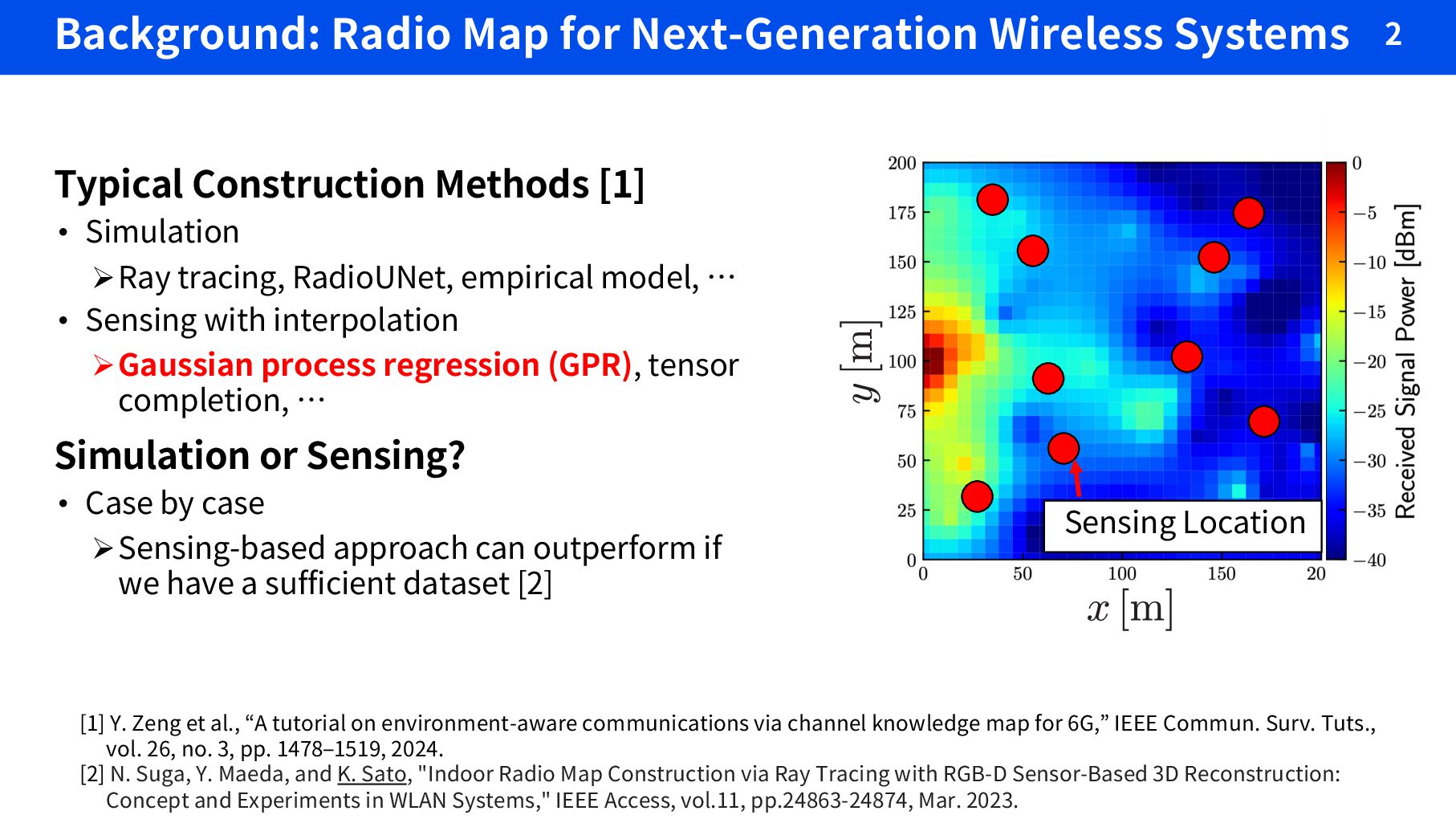
Methods [1] • Simulation ØRay tracing, RadioUNet, empirical model, … • Sensing with interpolation ØGaussian process regression (GPR), tensor completion, … Simulation or Sensing? • Case by case ØSensing-based approach can outperform if we have a sufficient dataset [2] [1] Y. Zeng et al., “A tutorial on environment-aware communications via channel knowledge map for 6G,” IEEE Commun. Surv. Tuts., vol. 26, no. 3, pp. 1478–1519, 2024. [2] N. Suga, Y. Maeda, and K. Sato, "Indoor Radio Map Construction via Ray Tracing with RGB-D Sensor-Based 3D Reconstruction: Concept and Experiments in WLAN Systems," IEEE Access, vol.11, pp.24863-24874, Mar. 2023. Sensing Location
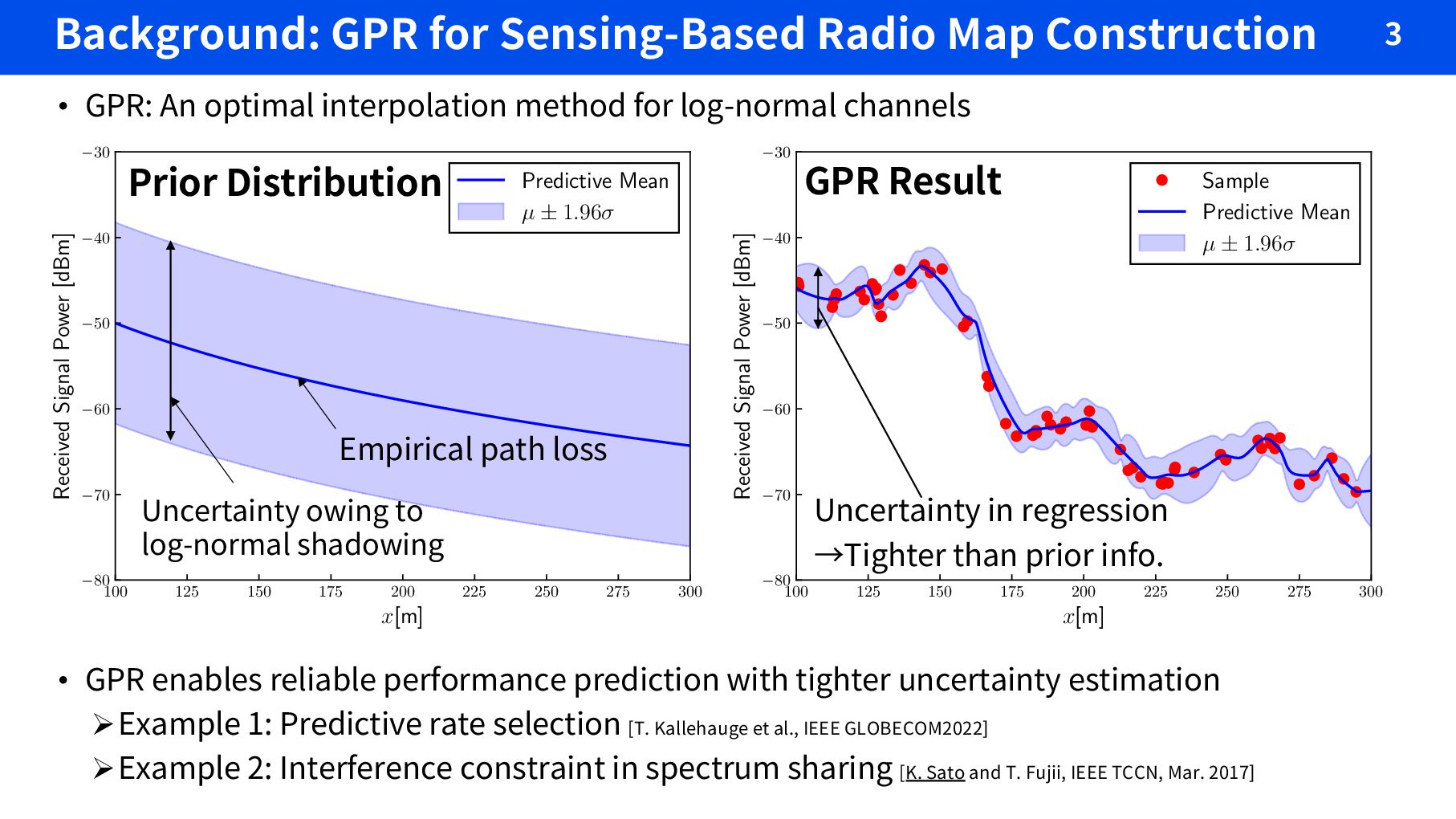
enables reliable performance prediction with tighter uncertainty estimation ØExample 1: Predictive rate selection [T. Kallehauge et al., IEEE GLOBECOM2022] ØExample 2: Interference constraint in spectrum sharing [K. Sato and T. Fujii, IEEE TCCN, Mar. 2017] 100 125 150 175 200 225 250 275 300 x[m] °80 °70 °60 °50 °40 °30 Received Signal Power [dBm] Predictive Mean µ ± 1.96æ Prior Distribution Uncertainty owing to log-normal shadowing 100 125 150 175 200 225 250 275 300 x[m] °80 °70 °60 °50 °40 °30 Received Signal Power [dBm] Sample Predictive Mean µ ± 1.96æ GPR Result Uncertainty in regression →Tighter than prior info. Empirical path loss • GPR: An optimal interpolation method for log-normal channels
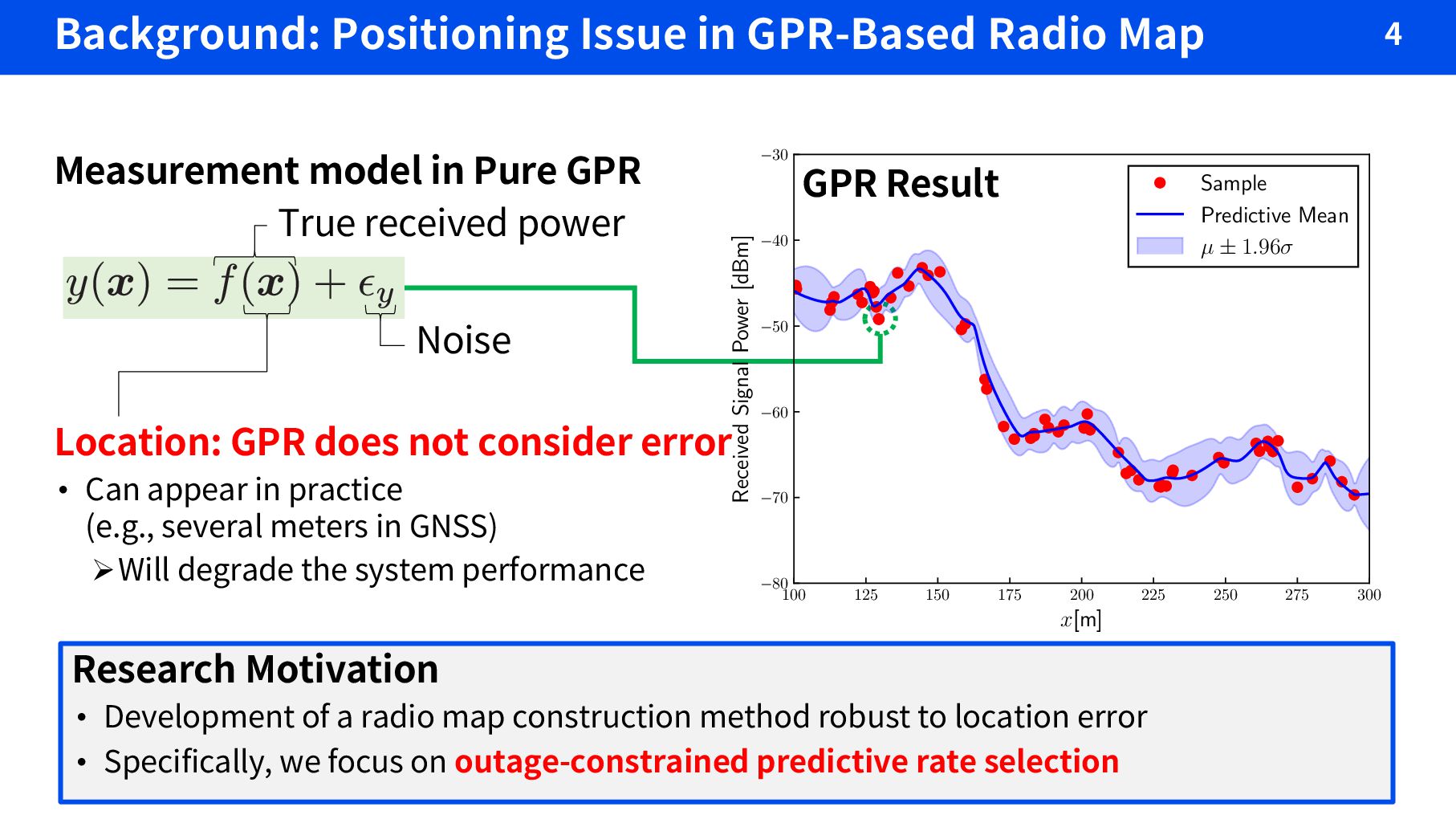
does not consider error • Can appear in practice (e.g., several meters in GNSS) ØWill degrade the system performance Measurement model in Pure GPR True received power Noise Research Motivation • Development of a radio map construction method robust to location error • Specifically, we focus on outage-constrained predictive rate selection 100 125 150 175 200 225 250 275 300 x[m] °80 °70 °60 °50 °40 °30 Received Signal Power [dBm] Sample Predictive Mean µ ± 1.96æ GPR Result
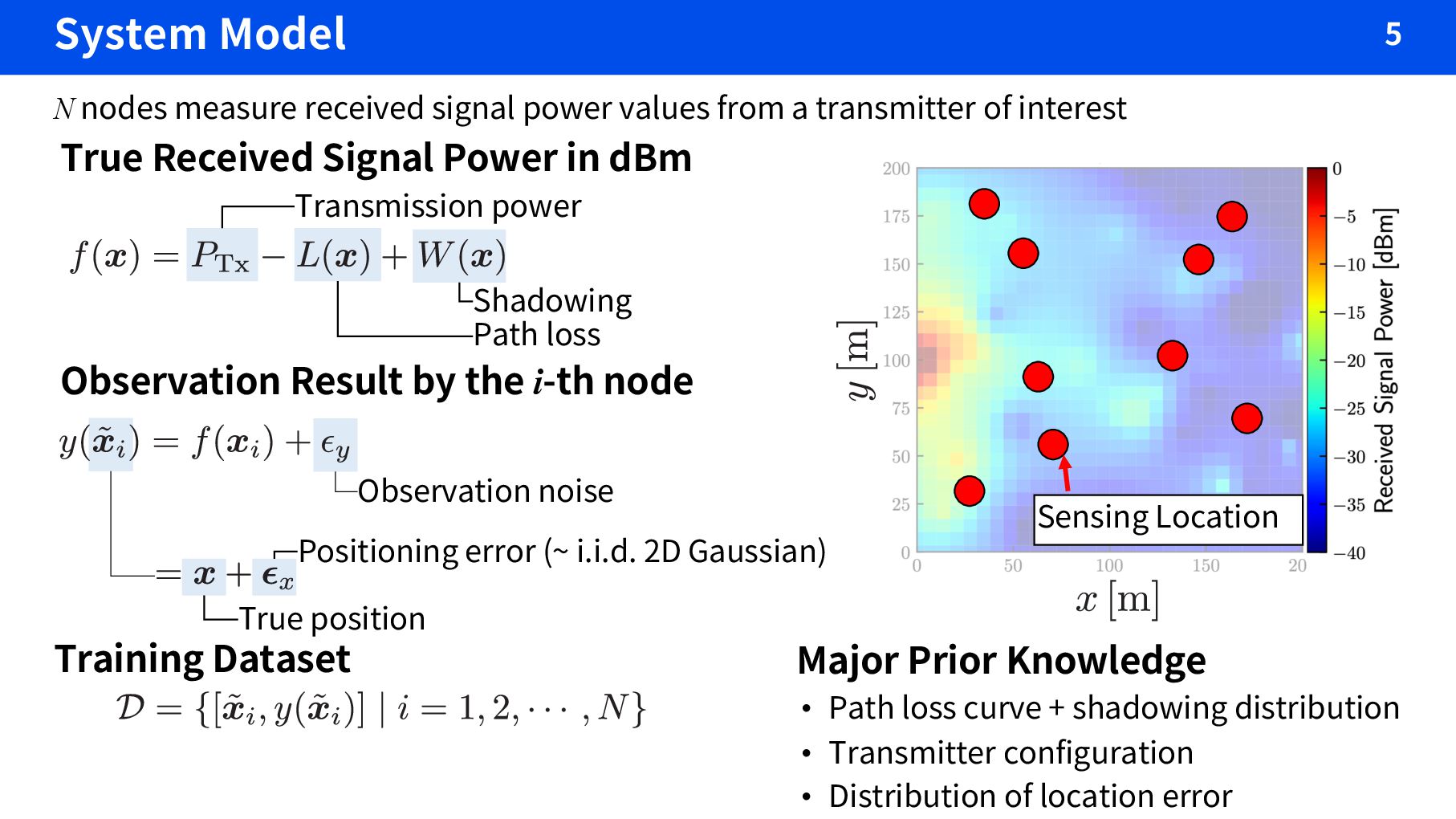
i.i.d. 2D Gaussian) True Received Signal Power in dBm Observation Result by the i-th node N nodes measure received signal power values from a transmitter of interest Transmission power Path loss Shadowing Observation noise Training Dataset Major Prior Knowledge • Path loss curve + shadowing distribution • Transmitter configuration • Distribution of location error
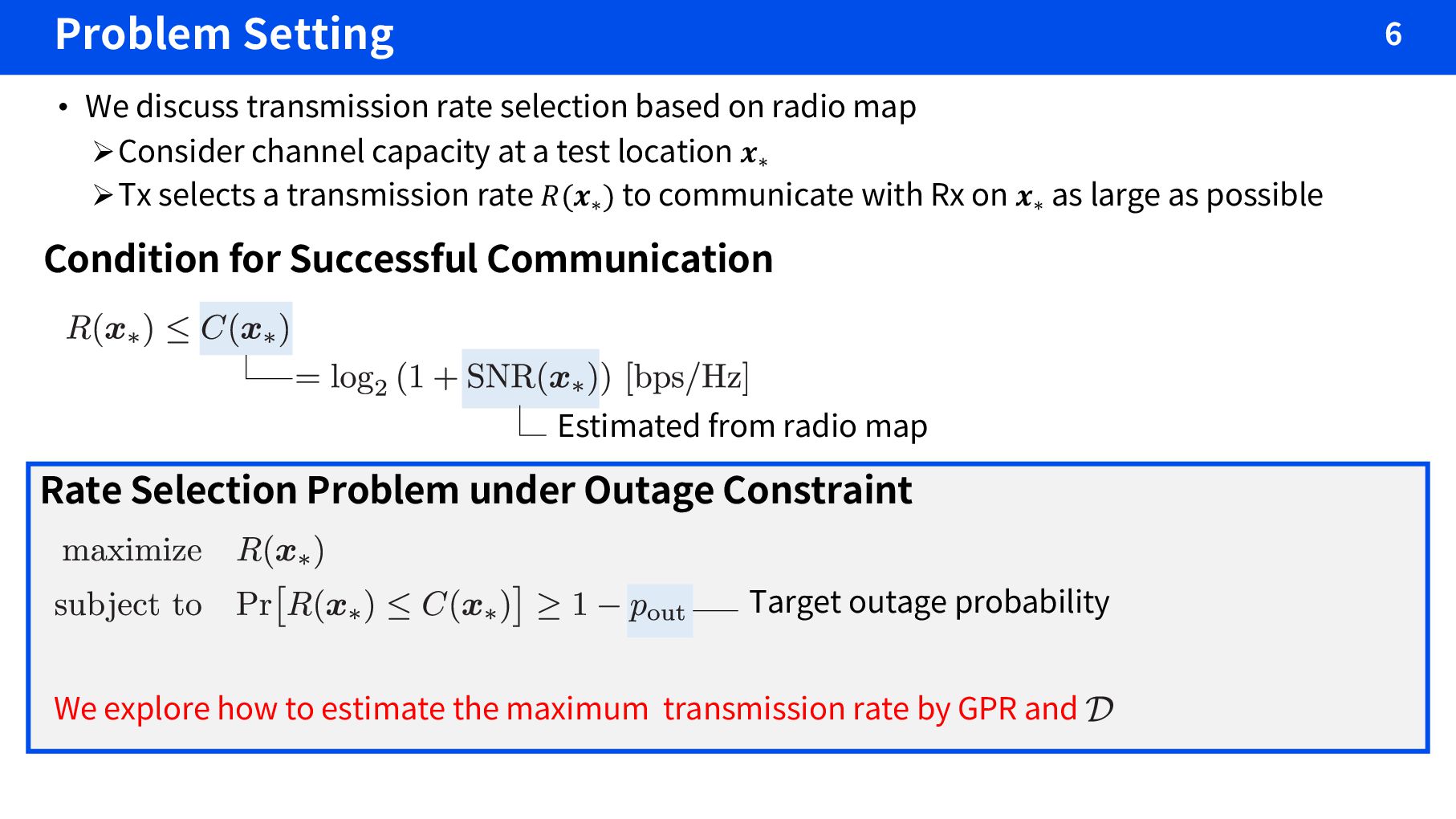
on radio map ØConsider channel capacity at a test location 𝒙∗ ØTx selects a transmission rate 𝑅(𝒙∗ ) to communicate with Rx on 𝒙∗ as large as possible Condition for Successful Communication Rate Selection Problem under Outage Constraint We explore how to estimate the maximum transmission rate by GPR and Target outage probability Estimated from radio map
of the Dataset and Test Value Predictive Mean Predictive Variance 100 125 150 175 200 225 250 275 300 x[m] °80 °70 °60 °50 °40 °30 Received Signal Power [dBm] Sample Predictive Mean µ ± 1.96æ Test point Mean (Path loss + transmission power) Covariance (kernel metrices) Received power values Unknown GPR Result:
about 𝑅, we have Optimal Rate Selection by Pure GP GPR results • This selection can satisfy the outage constraint if position information has no error ØHow should we improve the robustness of this solver?
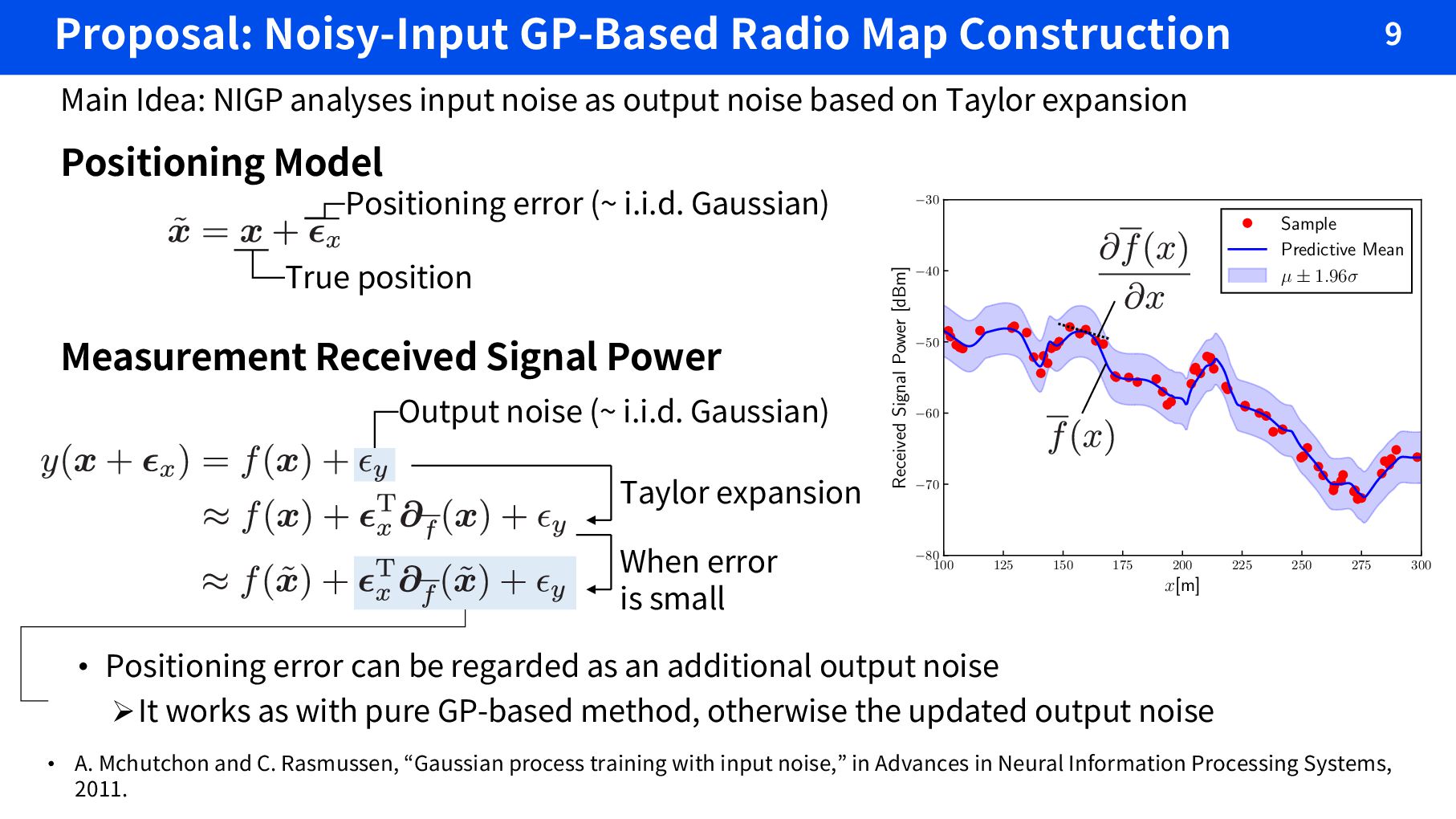
and C. Rasmussen, “Gaussian process training with input noise,” in Advances in Neural Information Processing Systems, 2011. Positioning Model Measurement Received Signal Power True position Positioning error (~ i.i.d. Gaussian) Output noise (~ i.i.d. Gaussian) Main Idea: NIGP analyses input noise as output noise based on Taylor expansion 100 125 150 175 200 225 250 275 300 x[m] °80 °70 °60 °50 °40 °30 Received Signal Power [dBm] Sample Predictive Mean µ ± 1.96æ Taylor expansion • Positioning error can be regarded as an additional output noise ØIt works as with pure GP-based method, otherwise the updated output noise When error is small
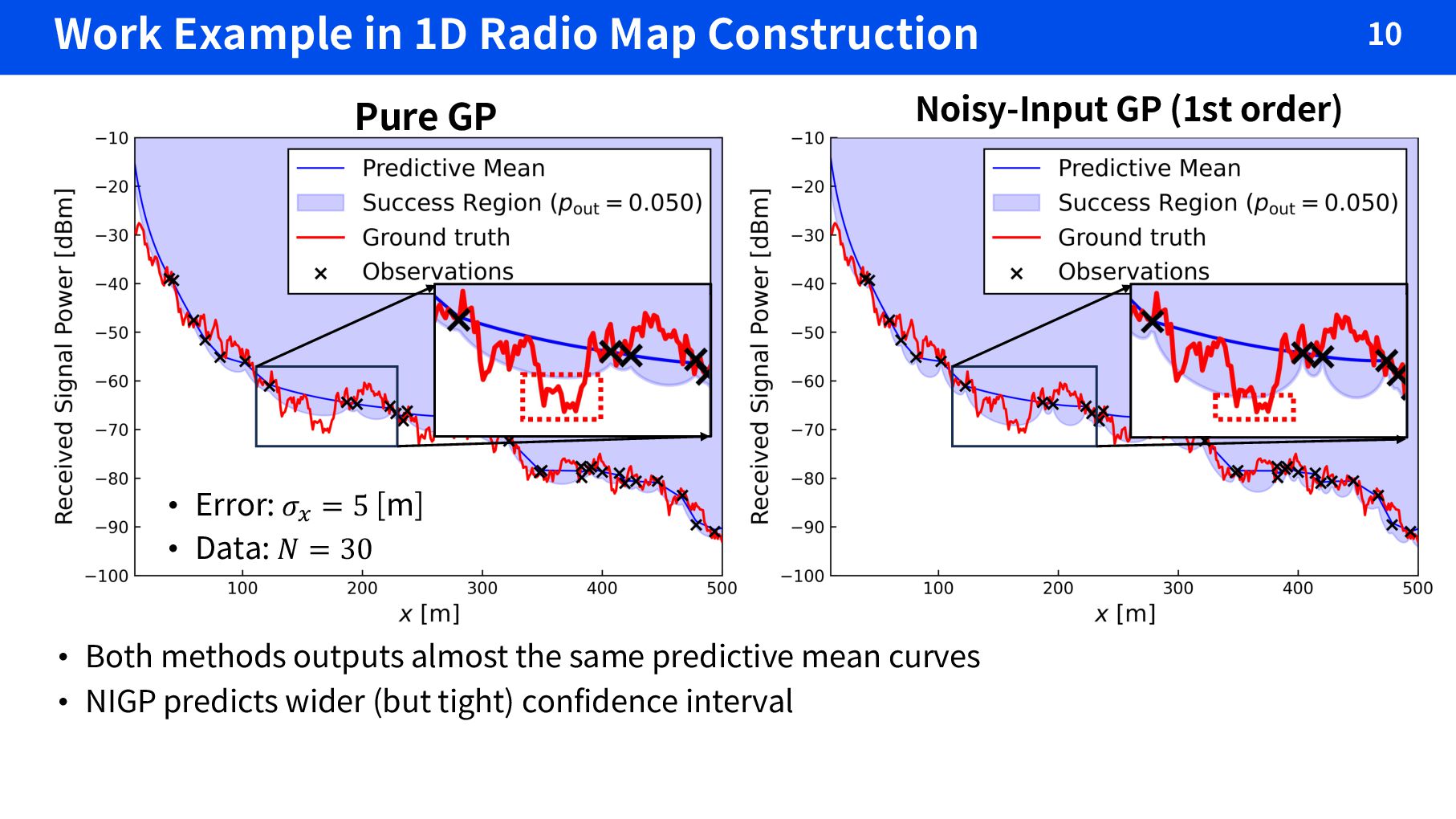
methods outputs almost the same predictive mean curves • NIGP predicts wider (but tight) confidence interval Pure GP Noisy-Input GP (1st order) • Error: 𝜎" = 5 [m] • Data: 𝑁 = 30
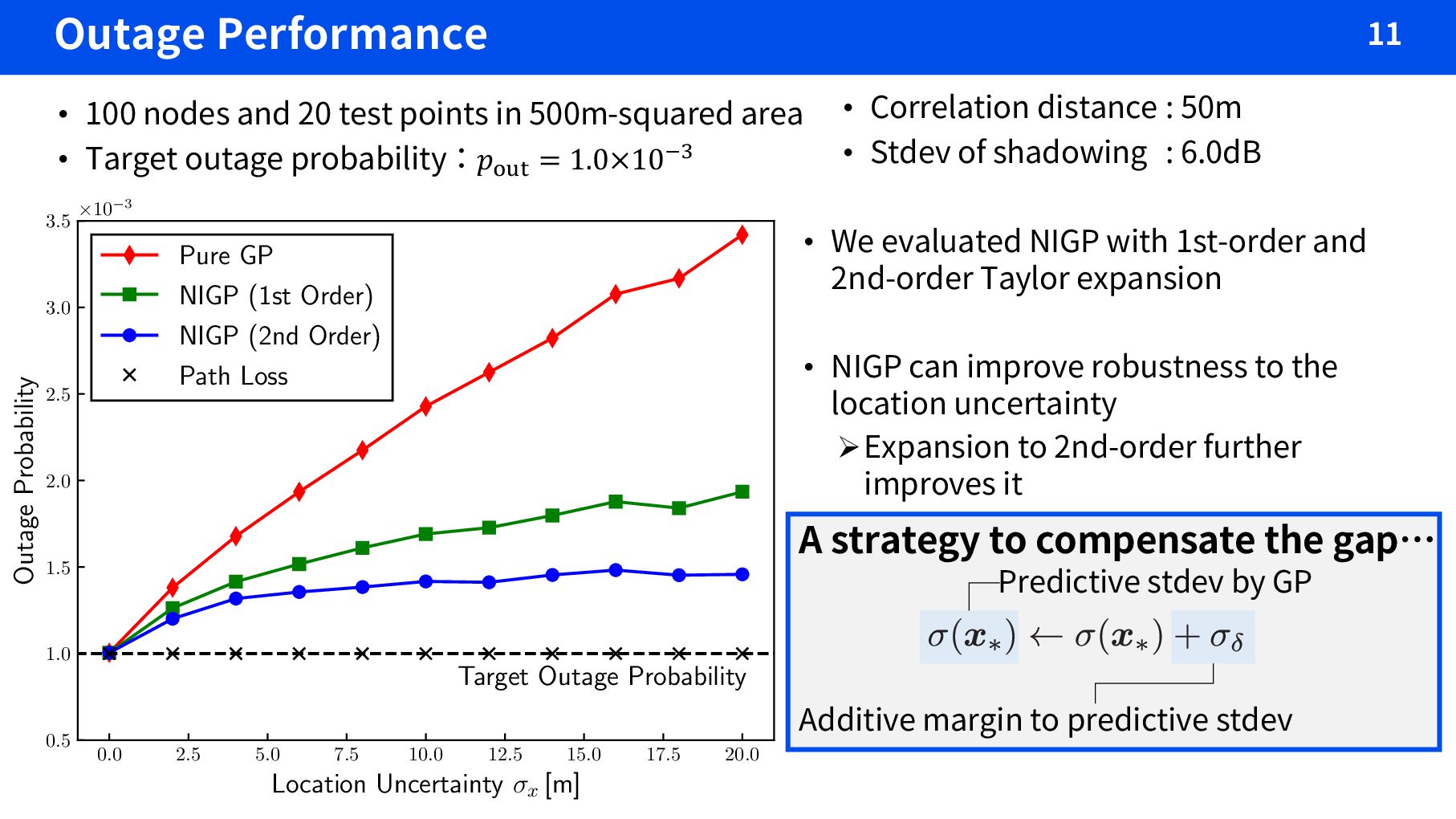
2nd-order Taylor expansion • NIGP can improve robustness to the location uncertainty ØExpansion to 2nd-order further improves it 0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 Location Uncertainty æx [m] 0.5 1.0 1.5 2.0 2.5 3.0 3.5 Outage Probability £10°3 Target Outage Probability Pure GP NIGP (1st Order) NIGP (2nd Order) Path Loss A strategy to compensate the gap… Additive margin to predictive stdev Predictive stdev by GP • 100 nodes and 20 test points in 500m-squared area • Target outage probability:𝑝#$% = 1.0×10&' • Correlation distance : 50m • Stdev of shadowing : 6.0dB
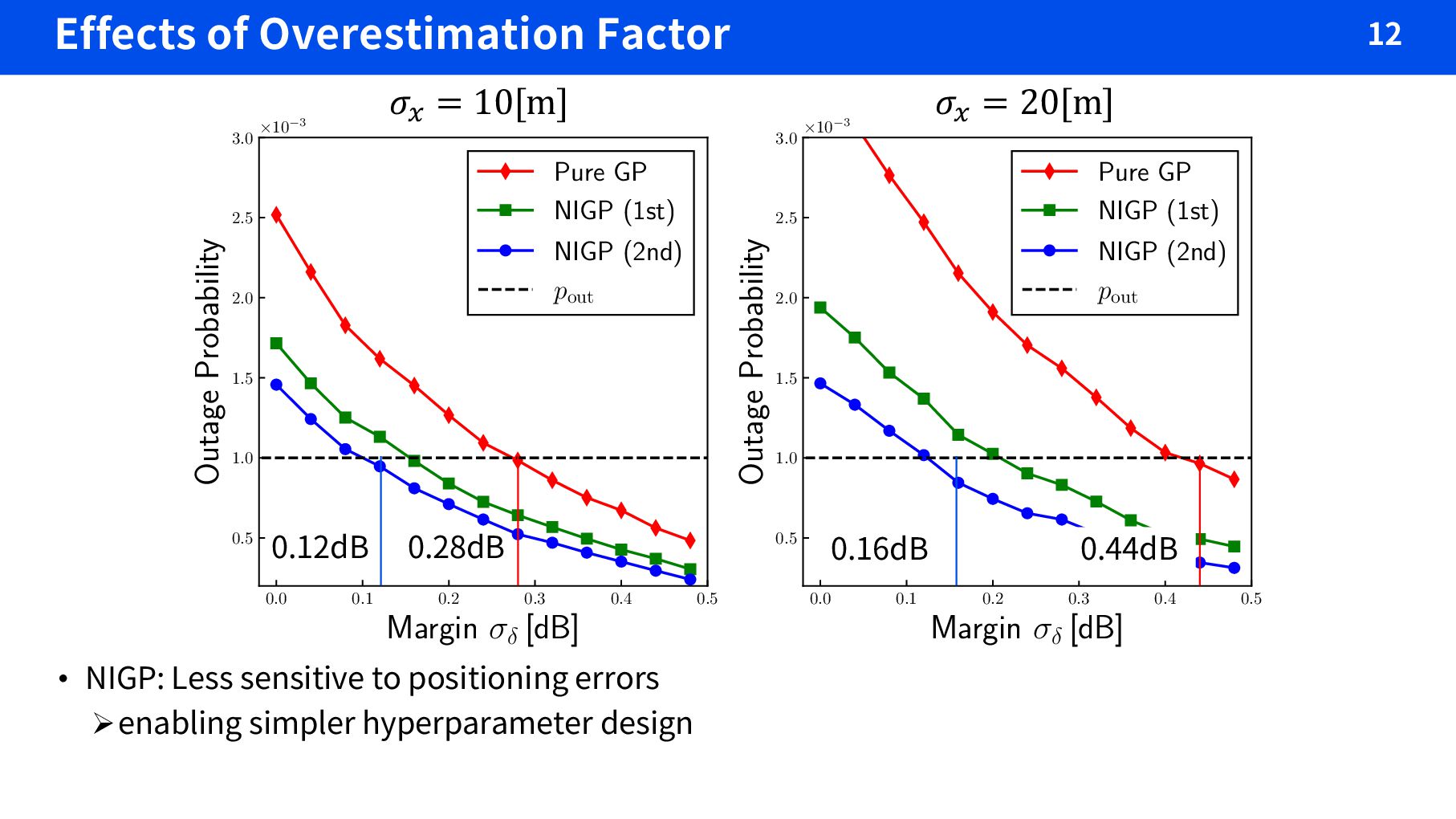
selection based on NIGP • Major findings: ØNIGP can significantly improve the outage probability performance ØNIGP slightly exceeds the target outage; however, its excess quantity does not show significant dependence on the positioning error • NIGP can simplify the design of radio map-based communication systems Contact • Koya Sato, Ph.D. • The University of Electro-Communications, Tokyo, Japan • [email protected]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}