Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
第66回コンピュータビジョン勉強会@関東 Epona: Autoregressive Diff...
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Kento Sasaki
February 08, 2026
Research
660
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
第66回コンピュータビジョン勉強会@関東 Epona: Autoregressive Diffusion World Model for Autonomous Driving
Kento Sasaki
February 08, 2026
More Decks by Kento Sasaki
See All by Kento Sasaki
大規模言語モデルを用いた日本語視覚言語モデルの評価方法とベースラインモデルの提案 【MIRU 2024】
kentosasaki
3
850
Generative Predictive Model for Autonomous Driving 第61回 コンピュータビジョン勉強会@関東 (後編)
kentosasaki
0
390
Other Decks in Research
See All in Research
Spatial Active Noise Control Based on Sound Field Interpolation Incorporating Physical Constraints
skoyamalab
0
130
Sequences of Logits Reveal the Low Rank Structure of Language Models
sansantech
PRO
1
290
Overview of AGRODEP Activities and Current Status: Dr. Seraphin Niyonsenga
akademiya2063
PRO
0
120
SoftMatcha 2: 1兆語規模コーパスの超高速かつ柔らかい検索
e869120_sub
7
3.6k
データサイエンティストの就労意識~2015 → 2026 一般(個人)会員アンケートより
datascientistsociety
PRO
0
350
National high-resolution cropland classification of Japan with agricultural census information and multi-temporal multi-modality datasets
satai
3
380
長時間動画QAにおけるマルチエージェント推論 ・SVAgent: Storyline-Guided Long Video Understanding via Cross-Modal Multi-Agent Collaboration
murakawatakuya
1
160
言語モデルから言語について語る際に押さえておきたいこと
eumesy
PRO
6
2.5k
明日から使える!研究効率化ツール入門
matsui_528
13
7.5k
RS-Agent: Automating Remote Sensing Tasks through Intelligent Agent
satai
3
400
SLAMはどこまで解決されたのか?
tomonom
0
850
「AIとWhyを深堀る」をAIと深堀る
iflection
0
530
Featured
See All Featured
Designing Dashboards & Data Visualisations in Web Apps
destraynor
231
55k
Building a Modern Day E-commerce SEO Strategy
aleyda
45
9.1k
SERP Conf. Vienna - Web Accessibility: Optimizing for Inclusivity and SEO
sarafernandez
2
1.5k
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
490
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
410
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
310
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
Evolving SEO for Evolving Search Engines
ryanjones
0
240
XXLCSS - How to scale CSS and keep your sanity
sugarenia
249
1.3M
Art, The Web, and Tiny UX
lynnandtonic
304
22k
Color Theory Basics | Prateek | Gurzu
gurzu
0
390
Transcript
第66回コンピュータビジョン勉強会@関東 世界モデル論文読み会 Kento Sasaki 紹介する論文: Epona: Autoregressive Diffusion World Model
for Autonomous Driving (Zhang+, ICCV 2025) Feb. 8, 2026
⾃⼰紹介 佐々木謙人 (Kento Sasaki) • Research Engineer @ Turing Inc.
(April 2023~) • X account: @kento_sasaki1 • 自動運転VLAモデルの研究開発 • ICLR 2026, AAAI 2026 (Oral), WACV 2025 (Oral) 1
紹介する論⽂ https://kevin-thu.github.io/Epona/ 2
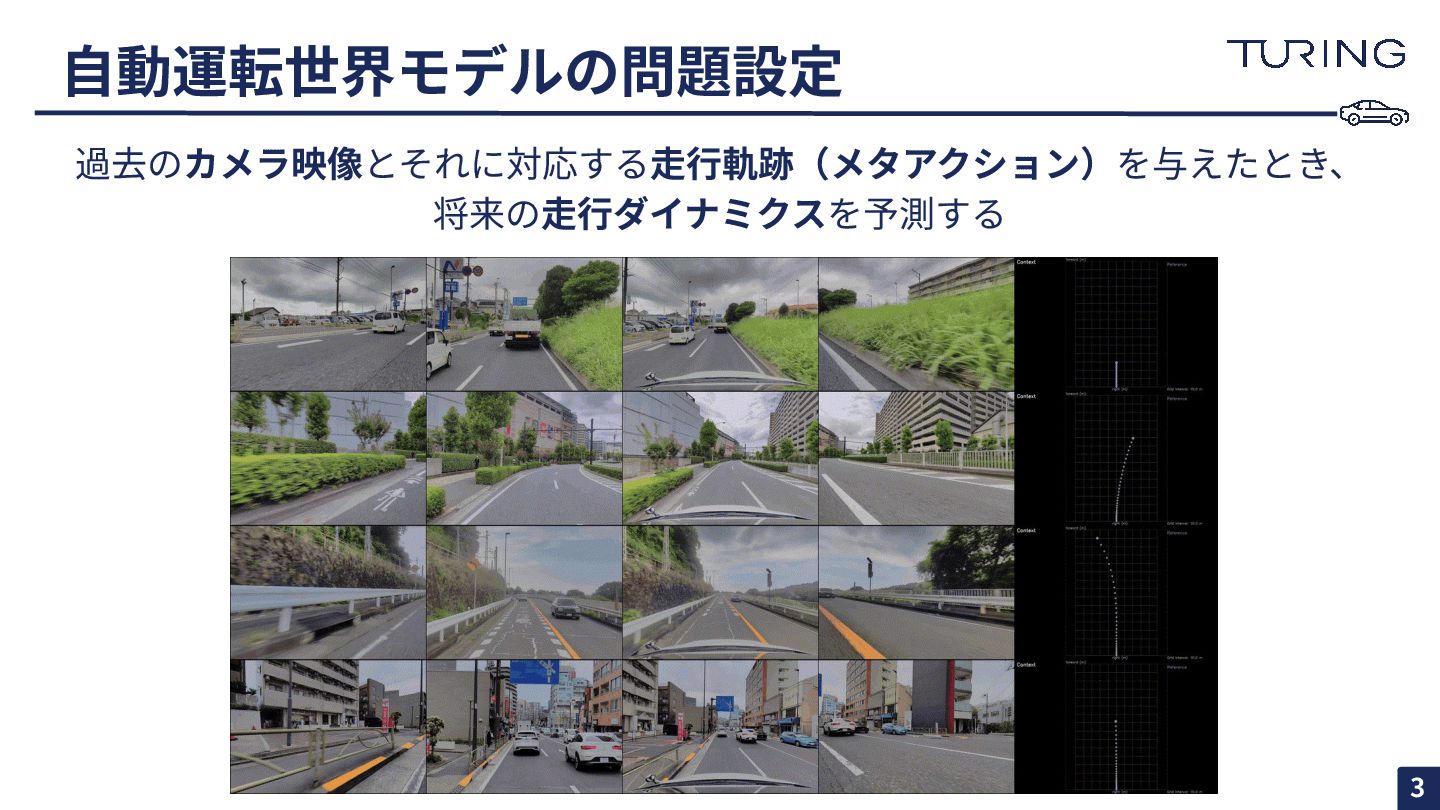
過去のカメラ映像とそれに対応する⾛⾏軌跡(メタアクション)を与えたとき、 将来の⾛⾏ダイナミクスを予測する ⾃動運転世界モデルの問題設定 3
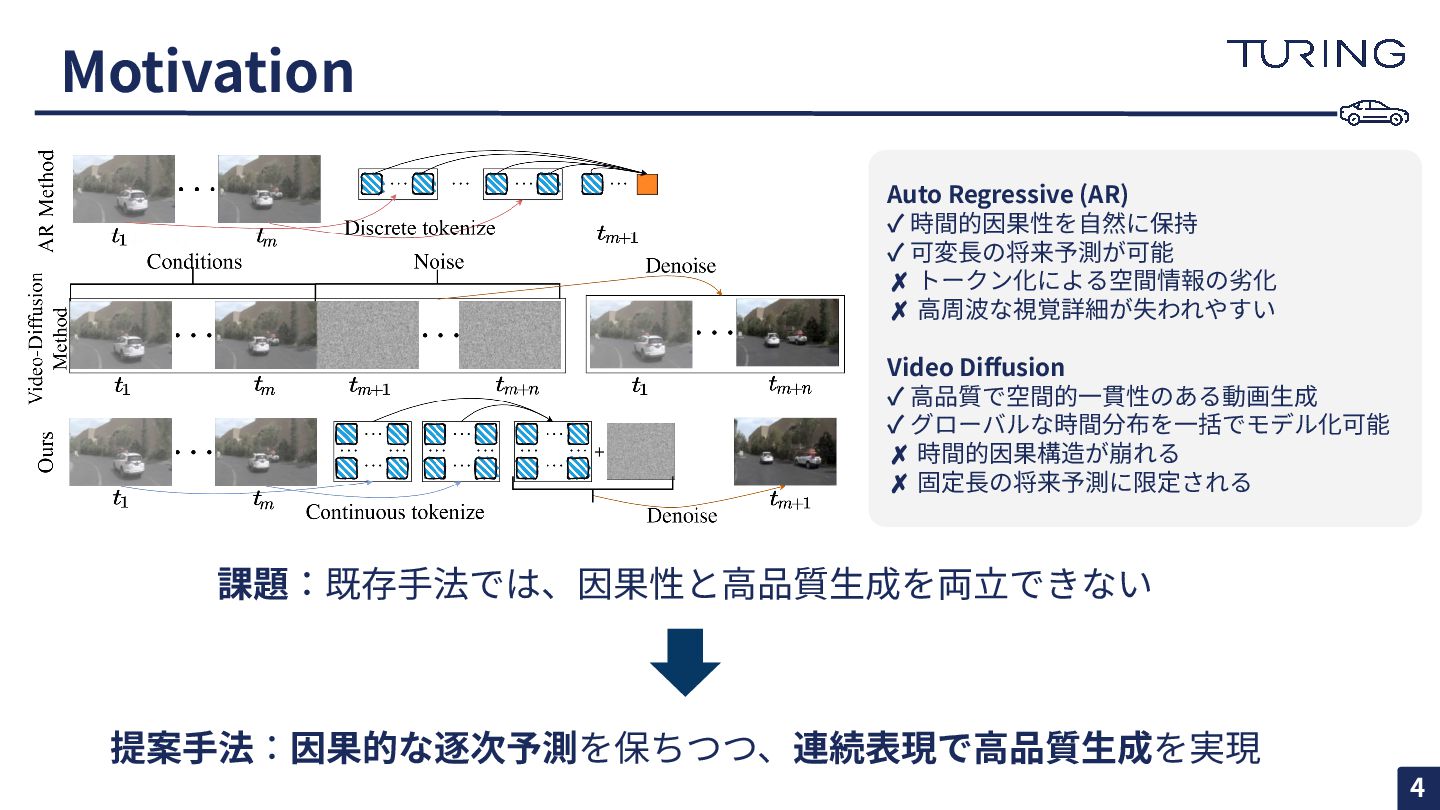
Motivation Auto Regressive (AR) ✓ 時間的因果性を⾃然に保持 ✓ 可変⻑の将来予測が可能 ✗ トークン化による空間情報の劣化
✗ ⾼周波な視覚詳細が失われやすい Video Diffusion ✓ ⾼品質で空間的⼀貫性のある動画⽣成 ✓ グローバルな時間分布を⼀括でモデル化可能 ✗ 時間的因果構造が崩れる ✗ 固定⻑の将来予測に限定される 課題:既存⼿法では、因果性と⾼品質⽣成を両⽴できない 提案⼿法:因果的な逐次予測を保ちつつ、連続表現で⾼品質⽣成を実現 4
Motivation 5
Method
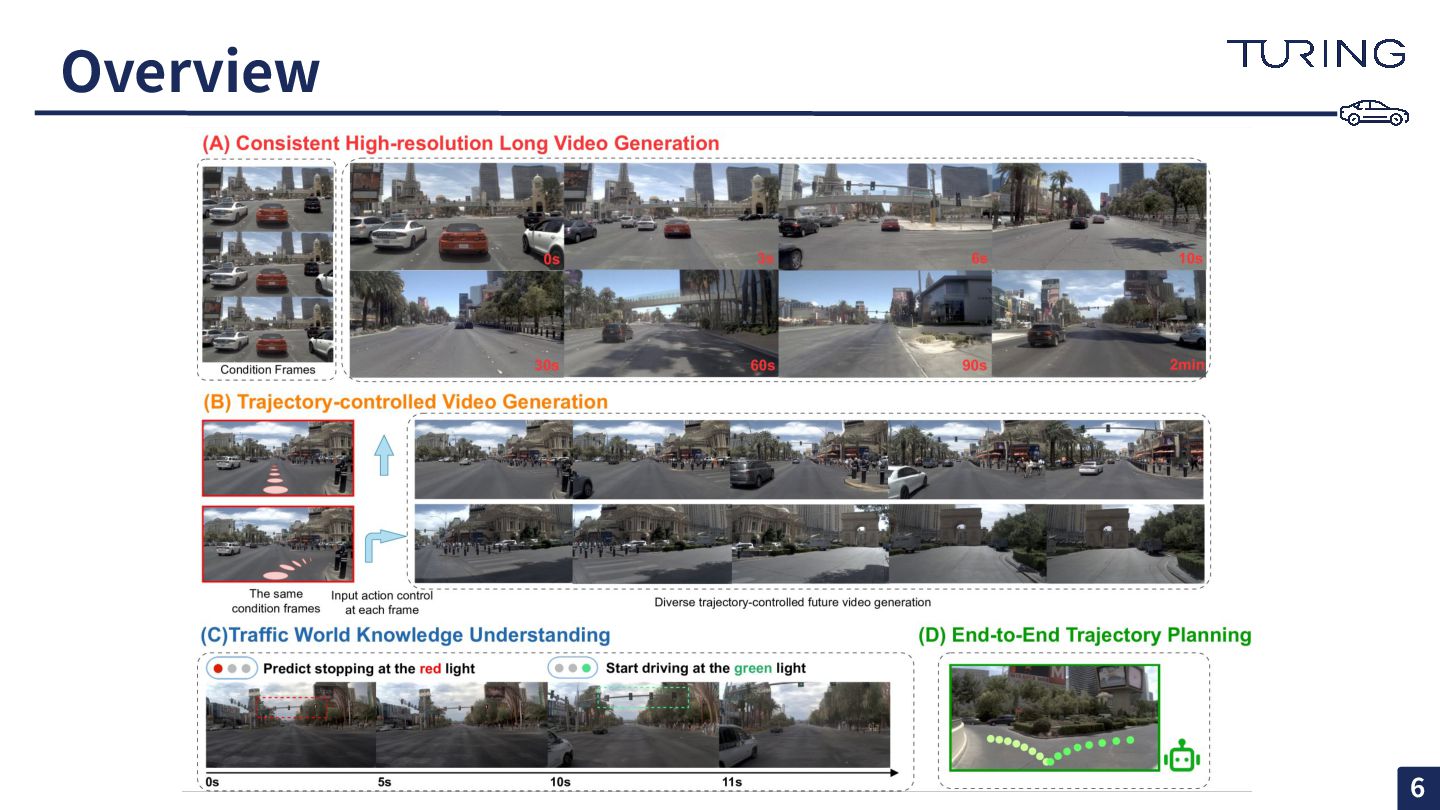
Overview 6
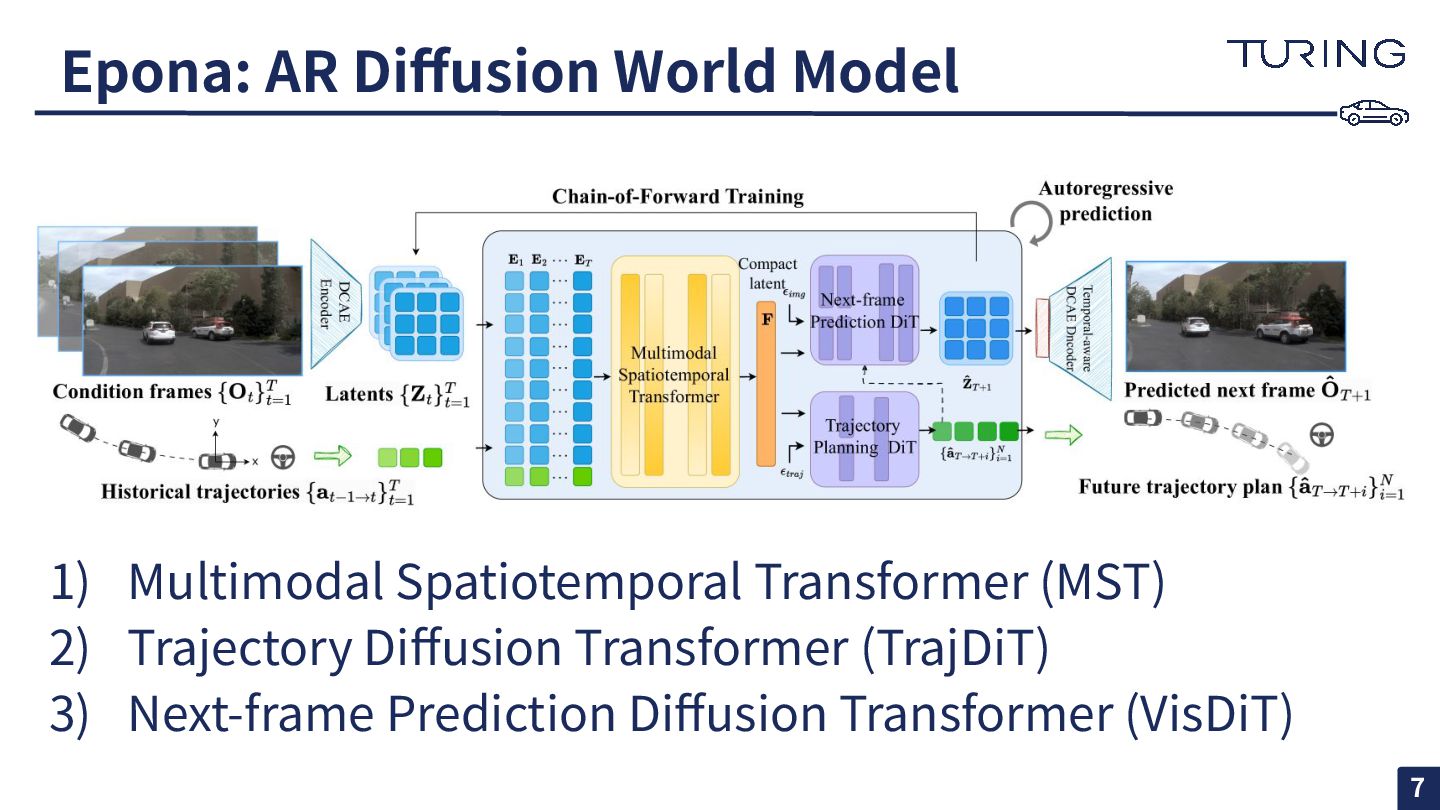
Epona: AR Diffusion World Model 1) Multimodal Spatiotemporal Transformer (MST)
2) Trajectory Diffusion Transformer (TrajDiT) 3) Next-frame Prediction Diffusion Transformer (VisDiT) 7
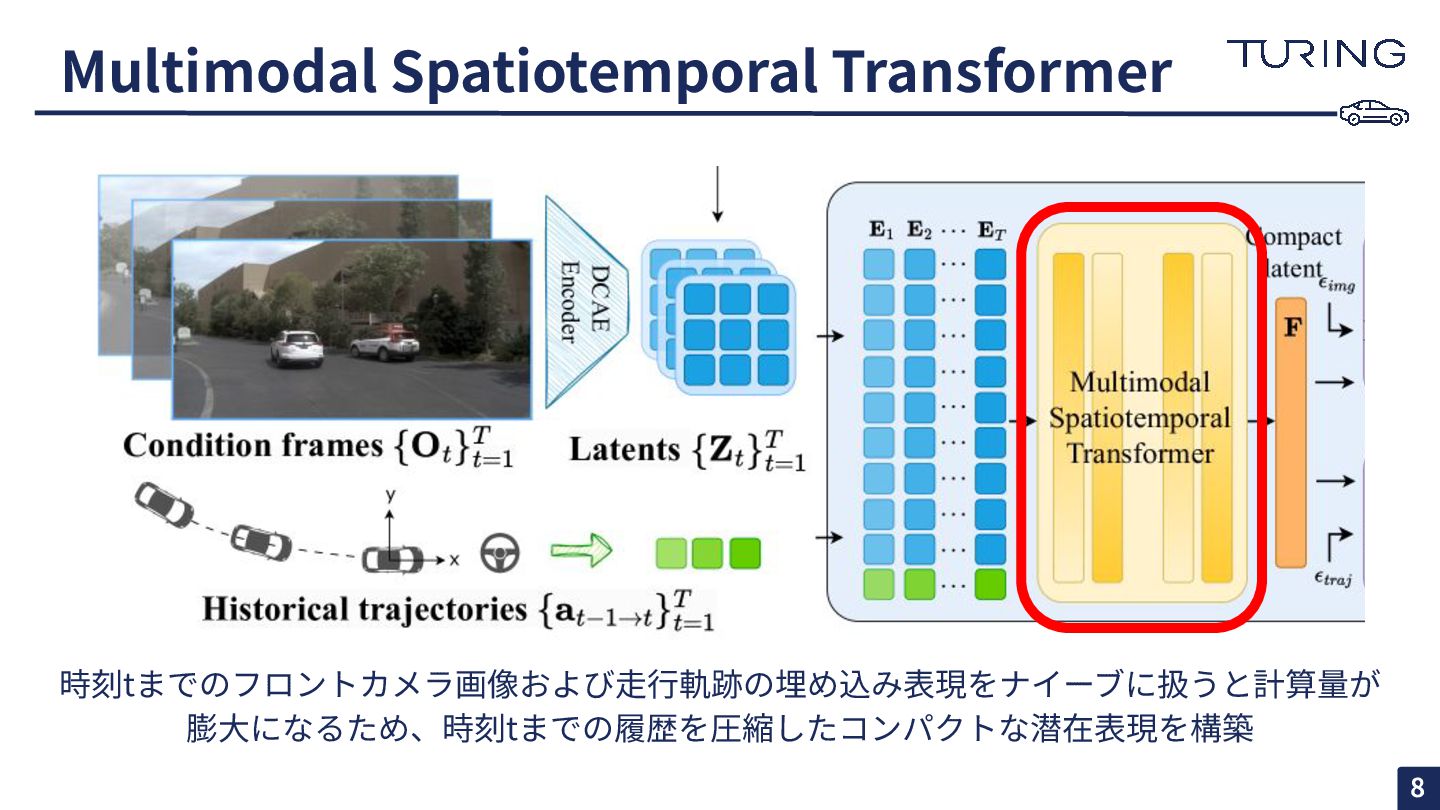
Multimodal Spatiotemporal Transformer 時刻tまでのフロントカメラ画像および⾛⾏軌跡の埋め込み表現をナイーブに扱うと計算量が 膨⼤になるため、時刻tまでの履歴を圧縮したコンパクトな潜在表現を構築 8
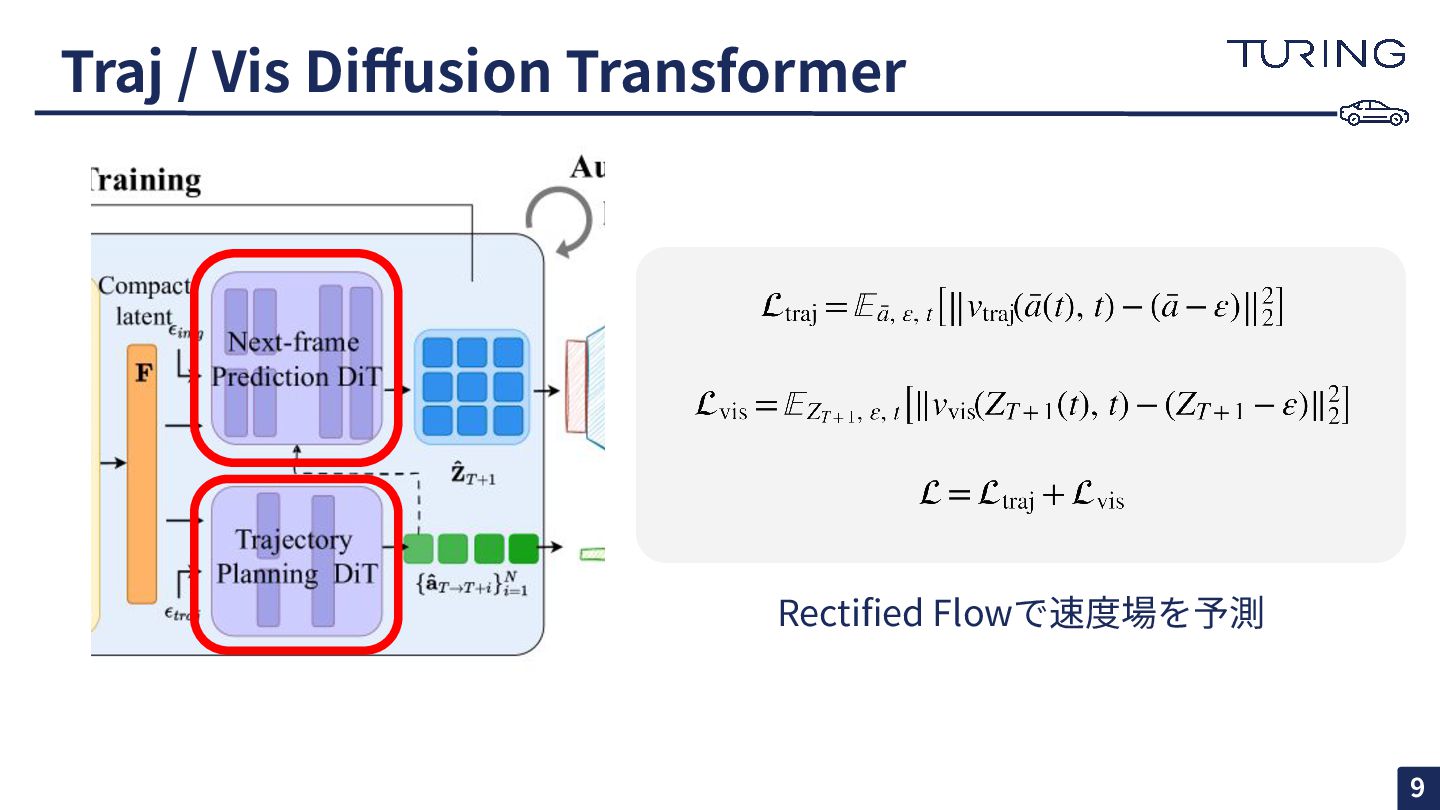
Traj / Vis Diffusion Transformer Rectified Flowで速度場を予測 9
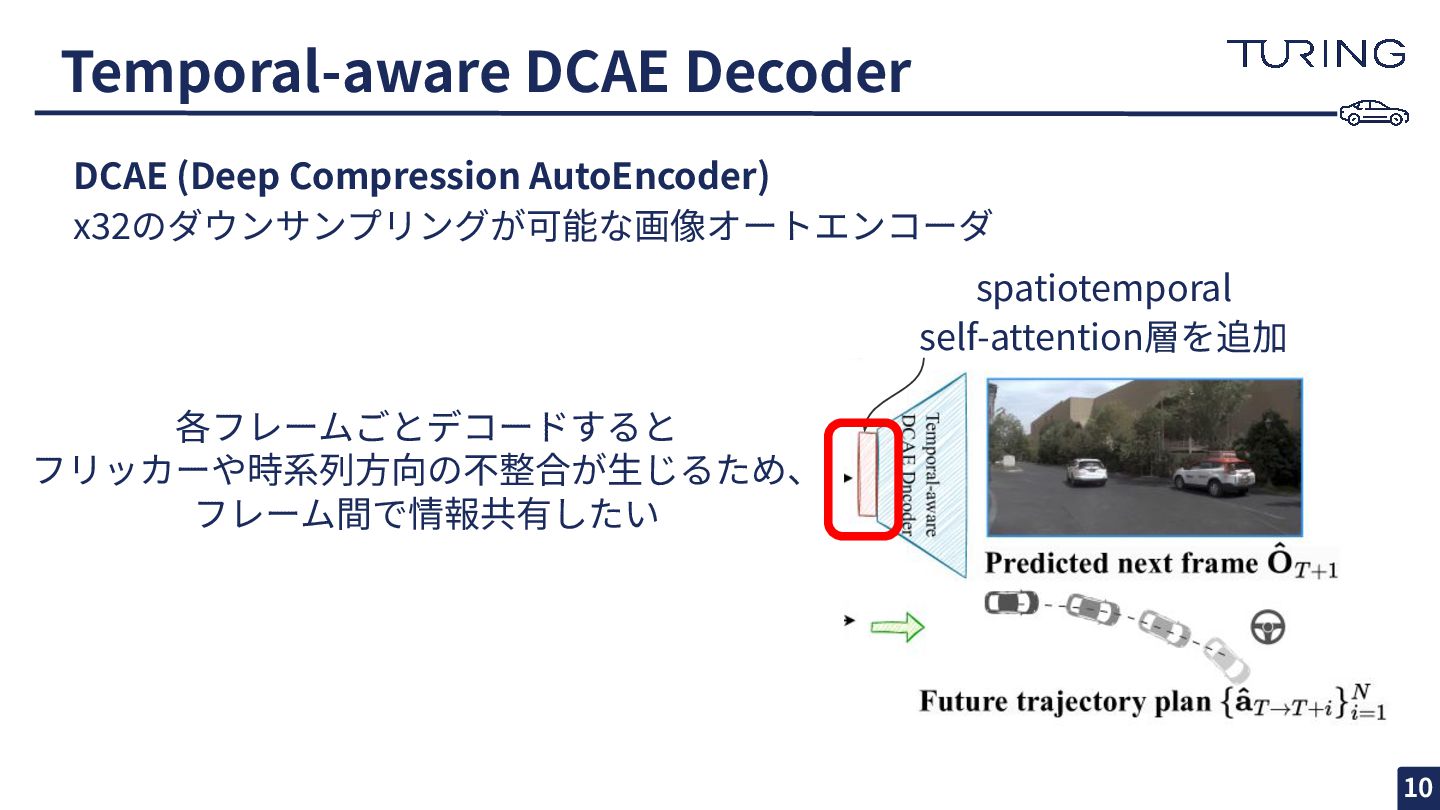
Temporal-aware DCAE Decoder spatiotemporal self-attention層を追加 各フレームごとデコードすると フリッカーや時系列⽅向の不整合が⽣じるため、 フレーム間で情報共有したい DCAE (Deep
Compression AutoEncoder) x32のダウンサンプリングが可能な画像オートエンコーダ 10
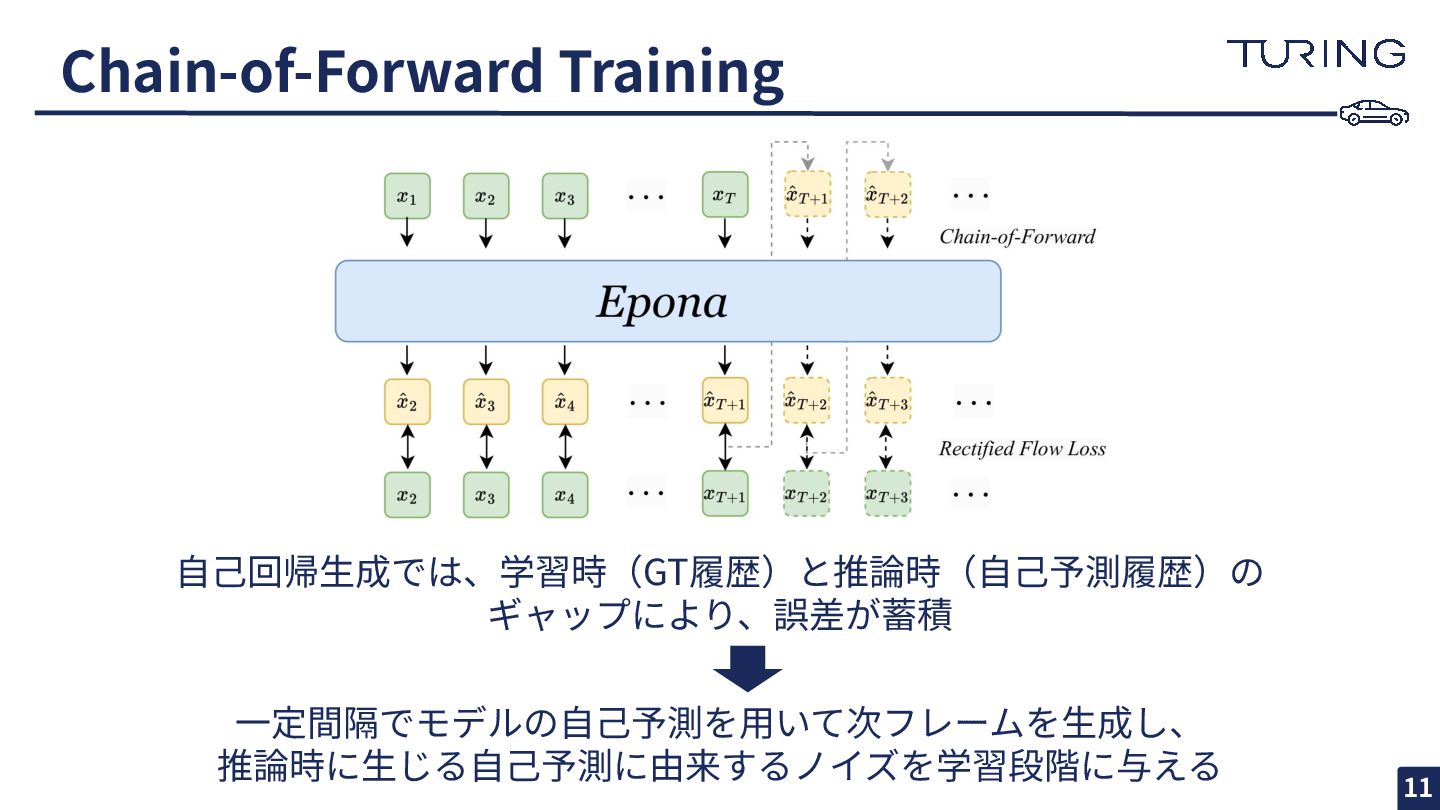
Chain-of-Forward Training ⾃⼰回帰⽣成では、学習時(GT履歴)と推論時(⾃⼰予測履歴)の ギャップにより、誤差が蓄積 ⼀定間隔でモデルの⾃⼰予測を⽤いて次フレームを⽣成し、 推論時に⽣じる⾃⼰予測に由来するノイズを学習段階に与える 11
Experiments
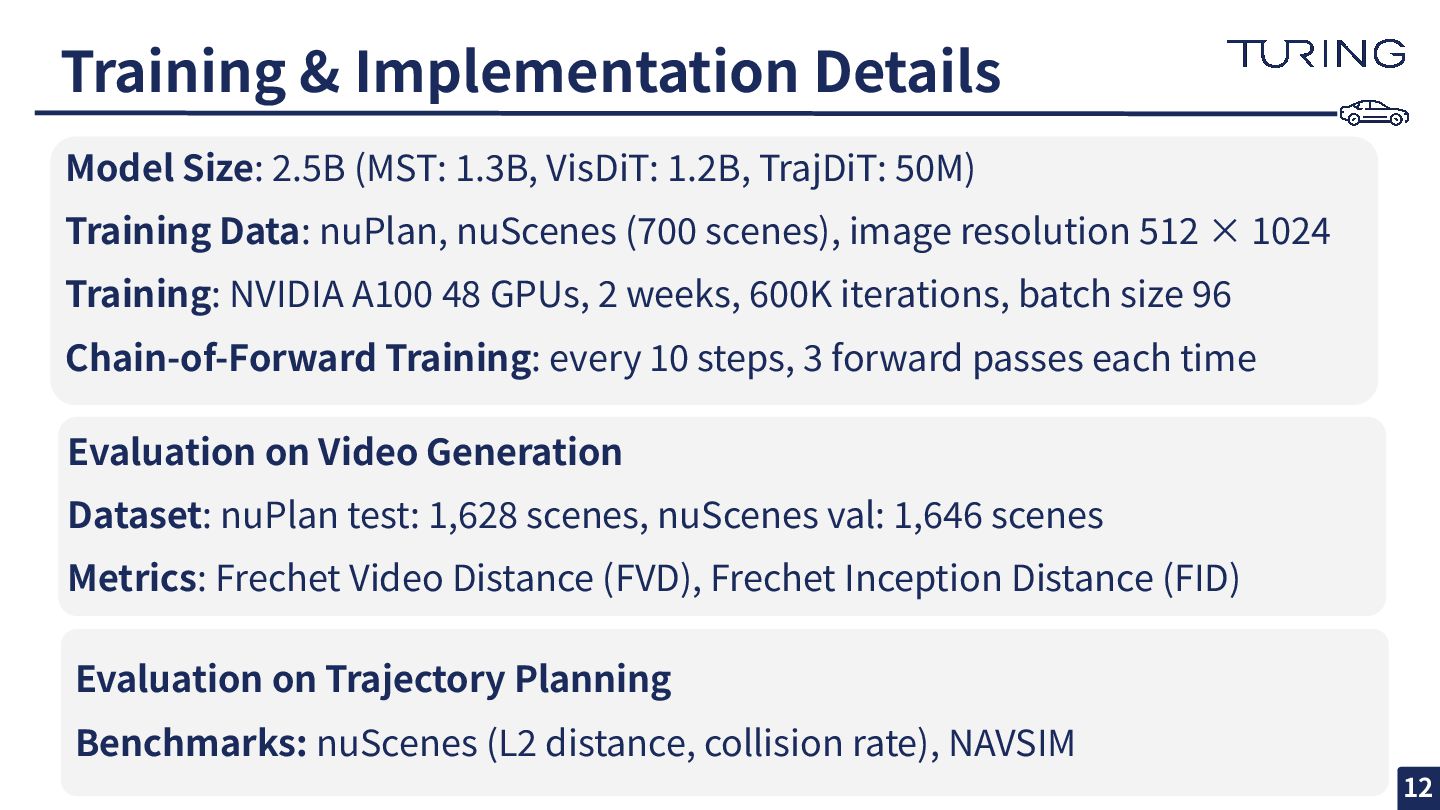
Model Size: 2.5B (MST: 1.3B, VisDiT: 1.2B, TrajDiT: 50M) Training
Data: nuPlan, nuScenes (700 scenes), image resolution 512 × 1024 Training: NVIDIA A100 48 GPUs, 2 weeks, 600K iterations, batch size 96 Chain-of-Forward Training: every 10 steps, 3 forward passes each time Training & Implementation Details Evaluation on Video Generation Dataset: nuPlan test: 1,628 scenes, nuScenes val: 1,646 scenes Metrics: Frechet Video Distance (FVD), Frechet Inception Distance (FID) Evaluation on Trajectory Planning Benchmarks: nuScenes (L2 distance, collision rate), NAVSIM 12
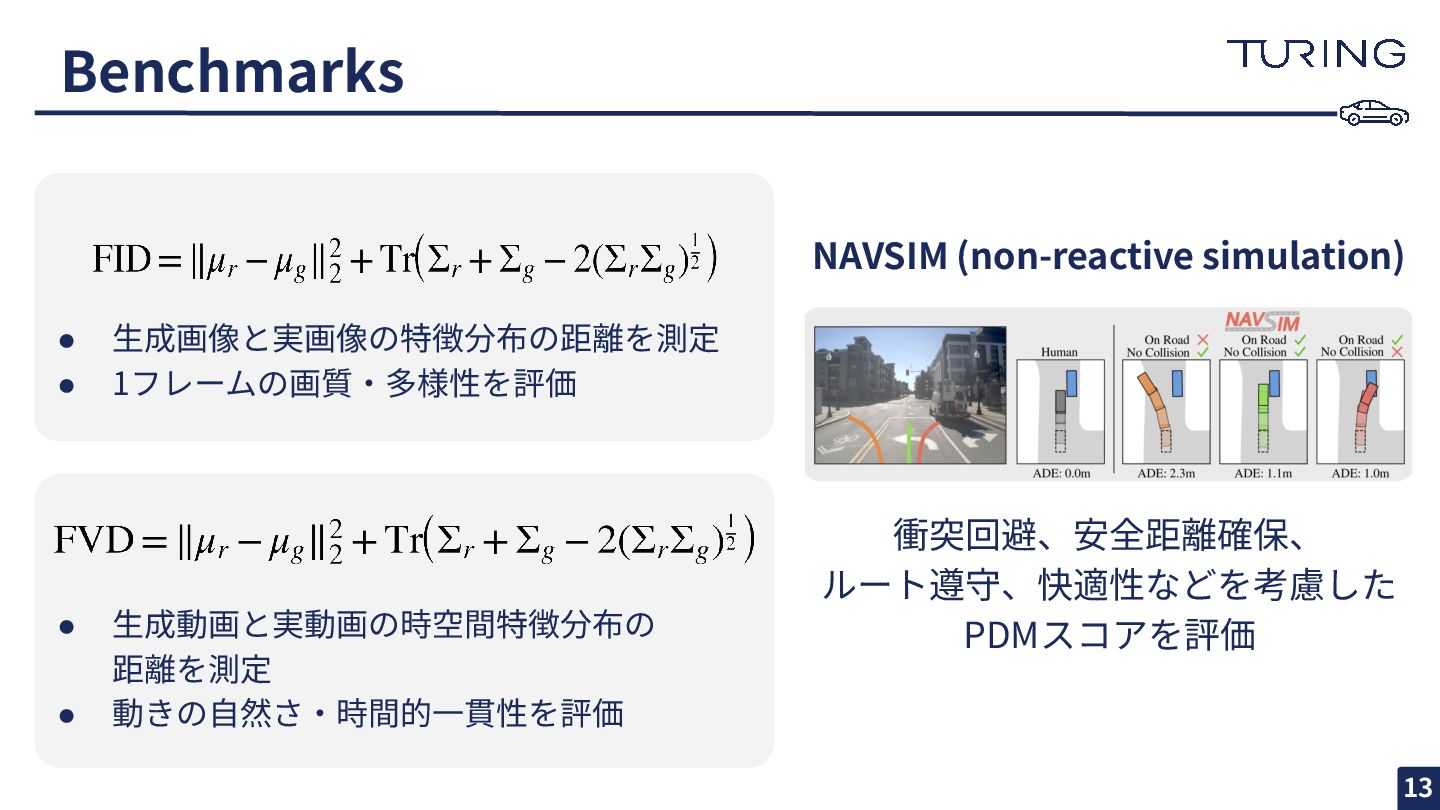
Benchmarks NAVSIM (non-reactive simulation) • ⽣成画像と実画像の特徴分布の距離を測定 • 1フレームの画質‧多様性を評価 • ⽣成動画と実動画の時空間特徴分布の
距離を測定 • 動きの⾃然さ‧時間的⼀貫性を評価 衝突回避、安全距離確保、 ルート遵守、快適性などを考慮した PDMスコアを評価 13
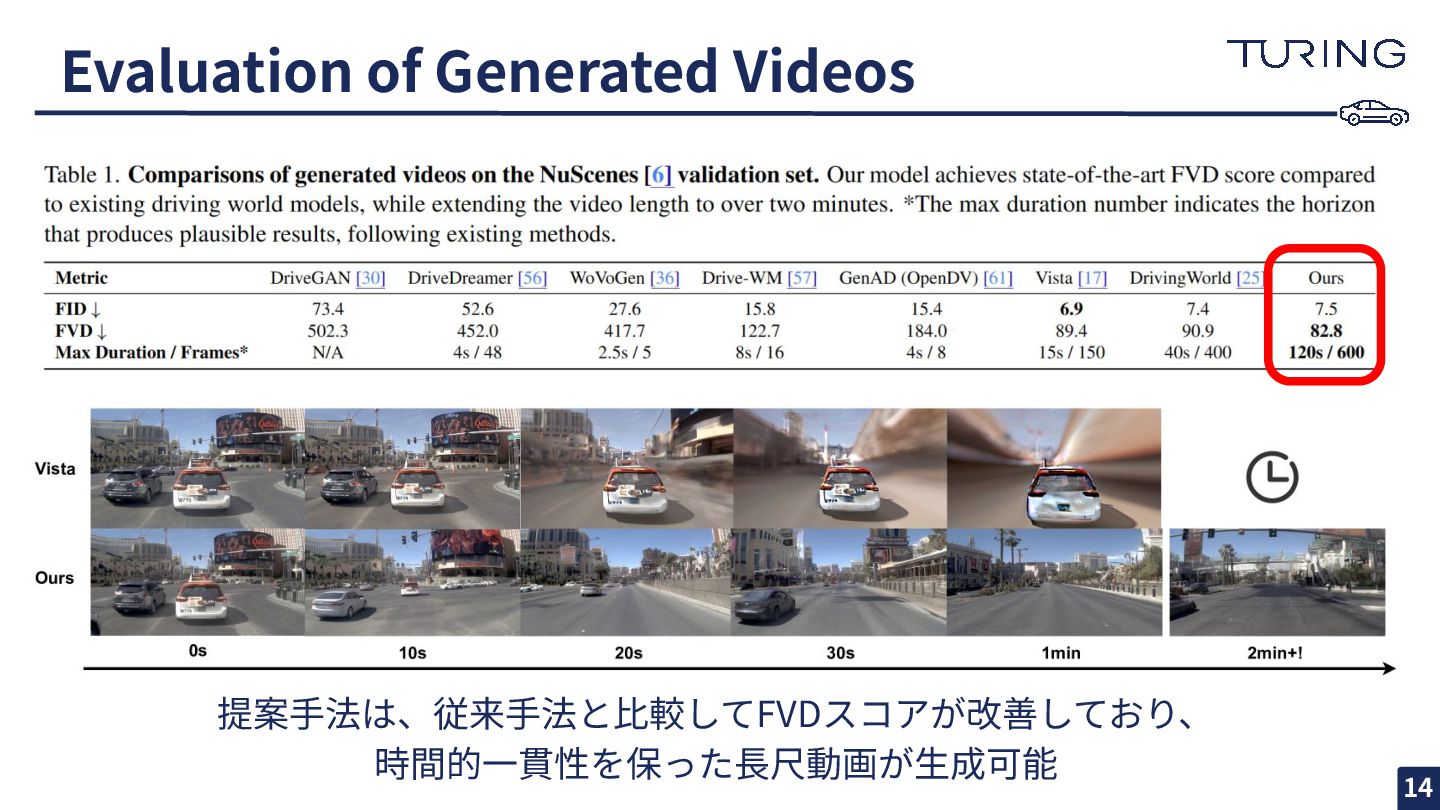
Evaluation of Generated Videos 提案⼿法は、従来⼿法と⽐較してFVDスコアが改善しており、 時間的⼀貫性を保った⻑尺動画が⽣成可能 14
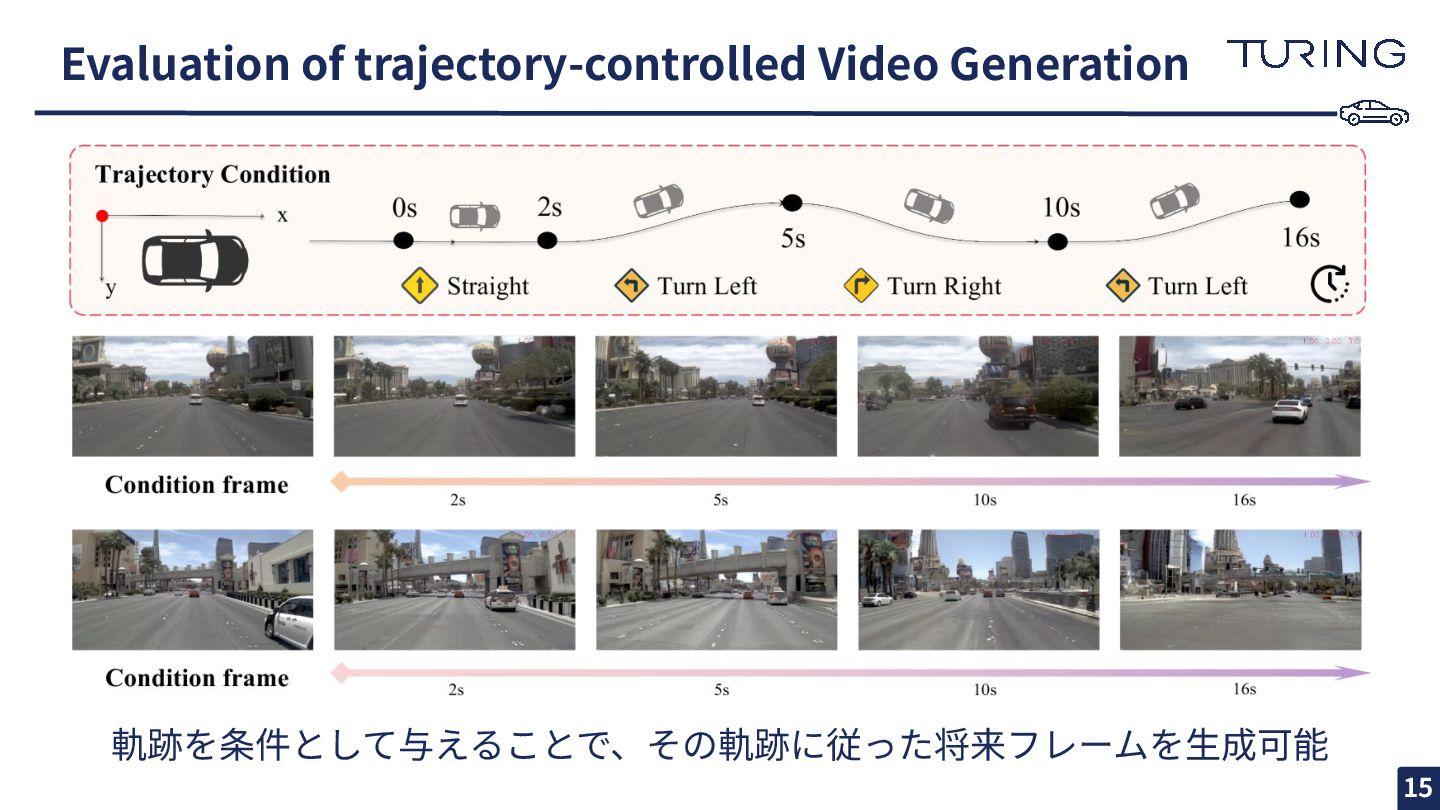
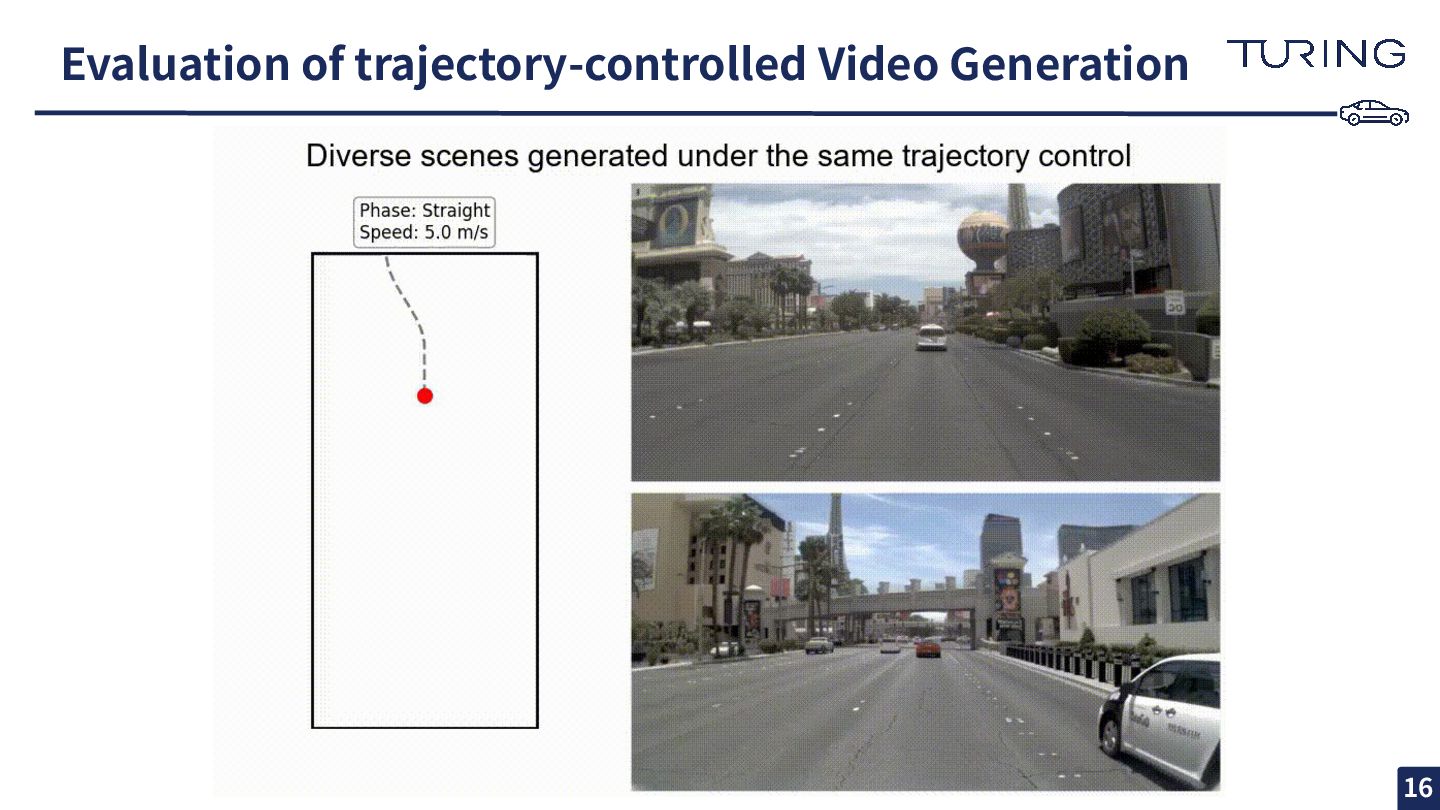
Evaluation of trajectory-controlled Video Generation 軌跡を条件として与えることで、その軌跡に従った将来フレームを⽣成可能 15
Evaluation of trajectory-controlled Video Generation 16
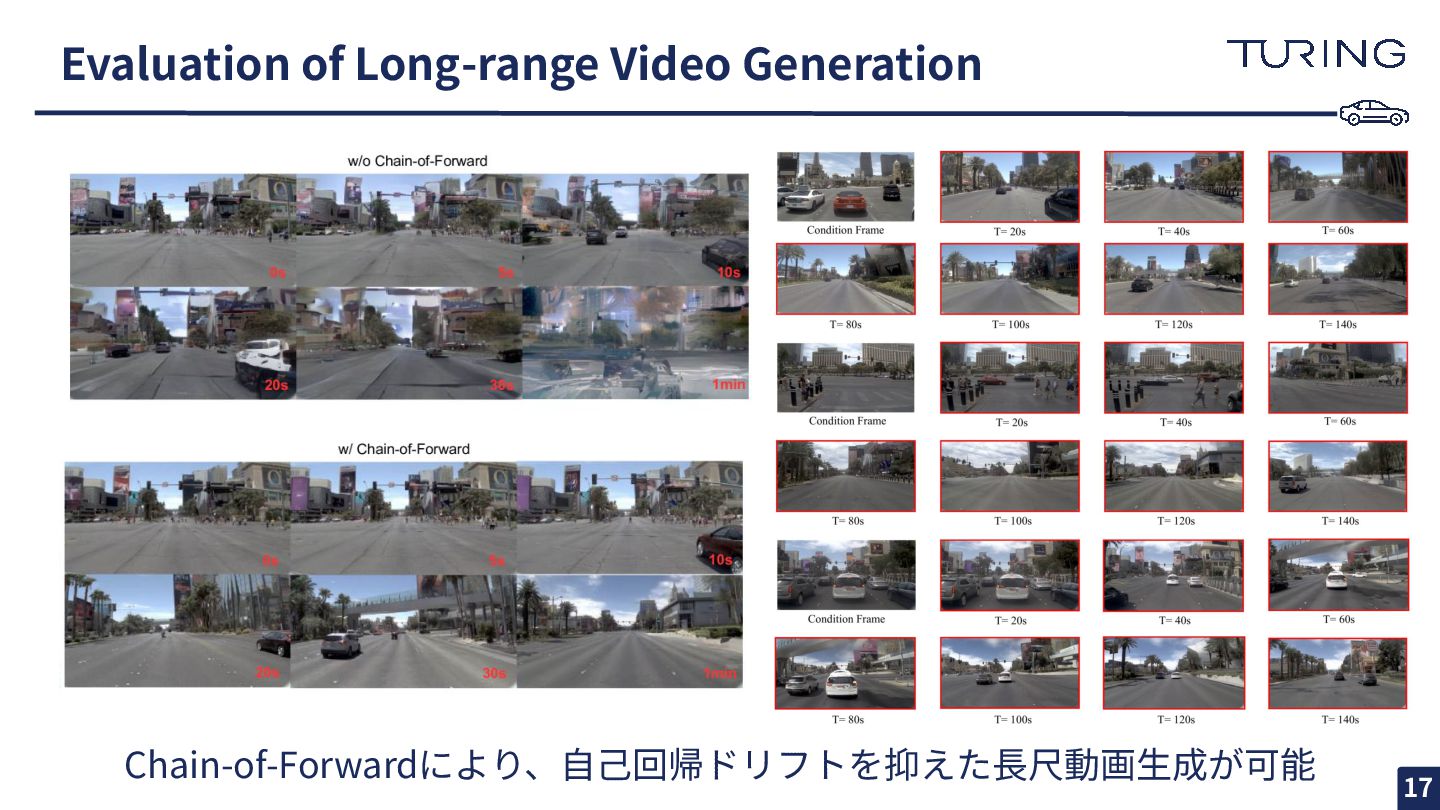
Chain-of-Forwardにより、⾃⼰回帰ドリフトを抑えた⻑尺動画⽣成が可能 Evaluation of Long-range Video Generation 17
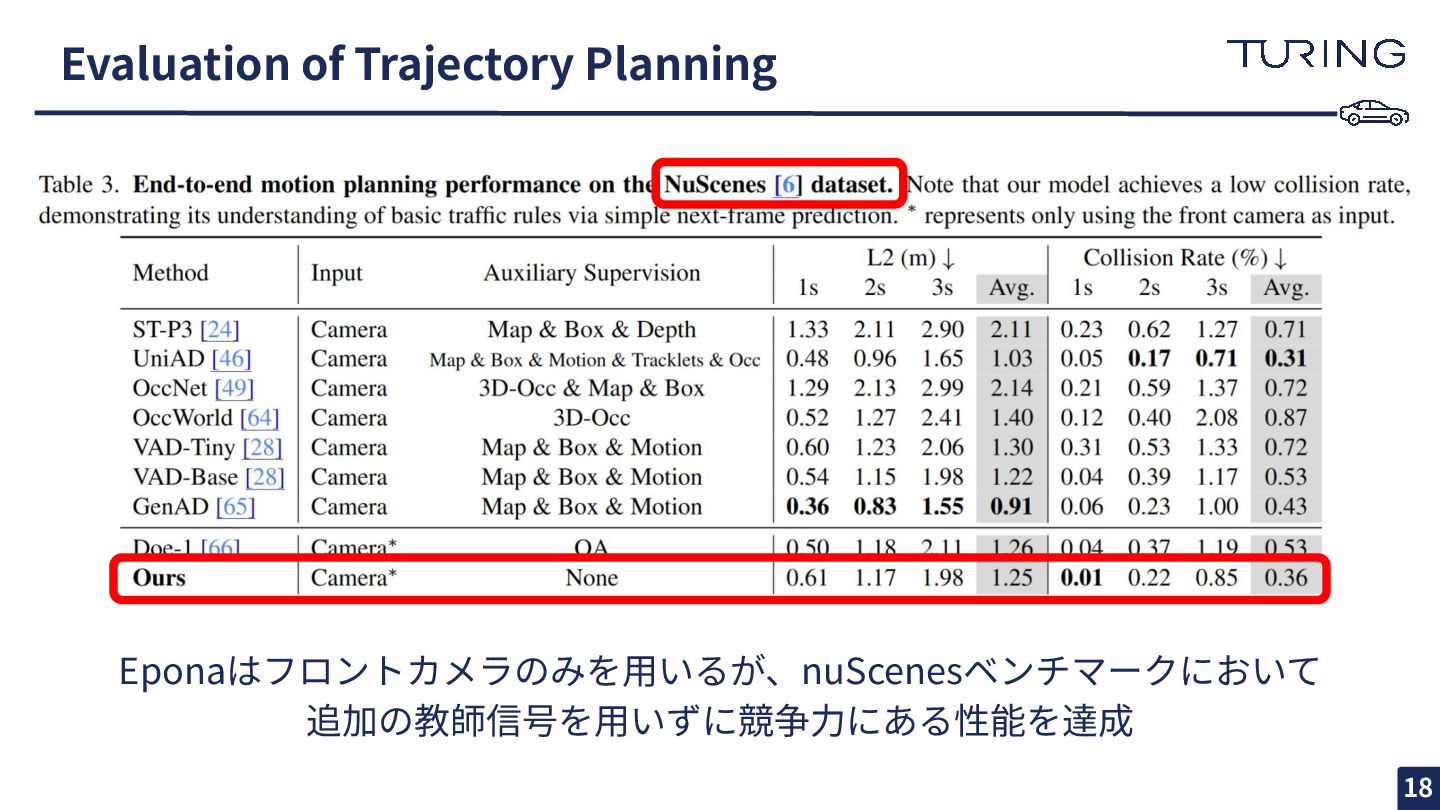
Evaluation of Trajectory Planning Eponaはフロントカメラのみを⽤いるが、nuScenesベンチマークにおいて 追加の教師信号を⽤いずに競争⼒にある性能を達成 18
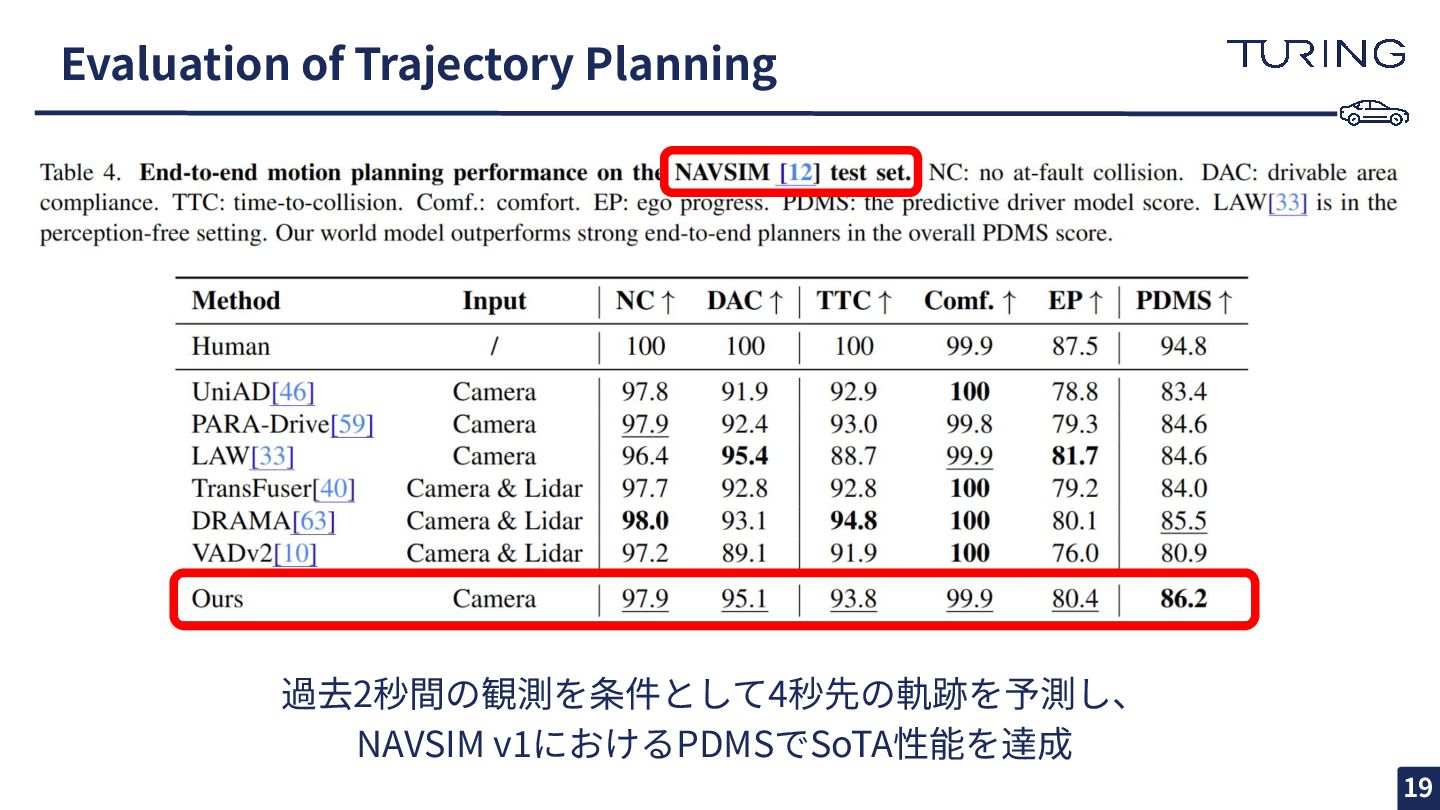
Evaluation of Trajectory Planning 過去2秒間の観測を条件として4秒先の軌跡を予測し、 NAVSIM v1におけるPDMSでSoTA性能を達成 19
Ablations
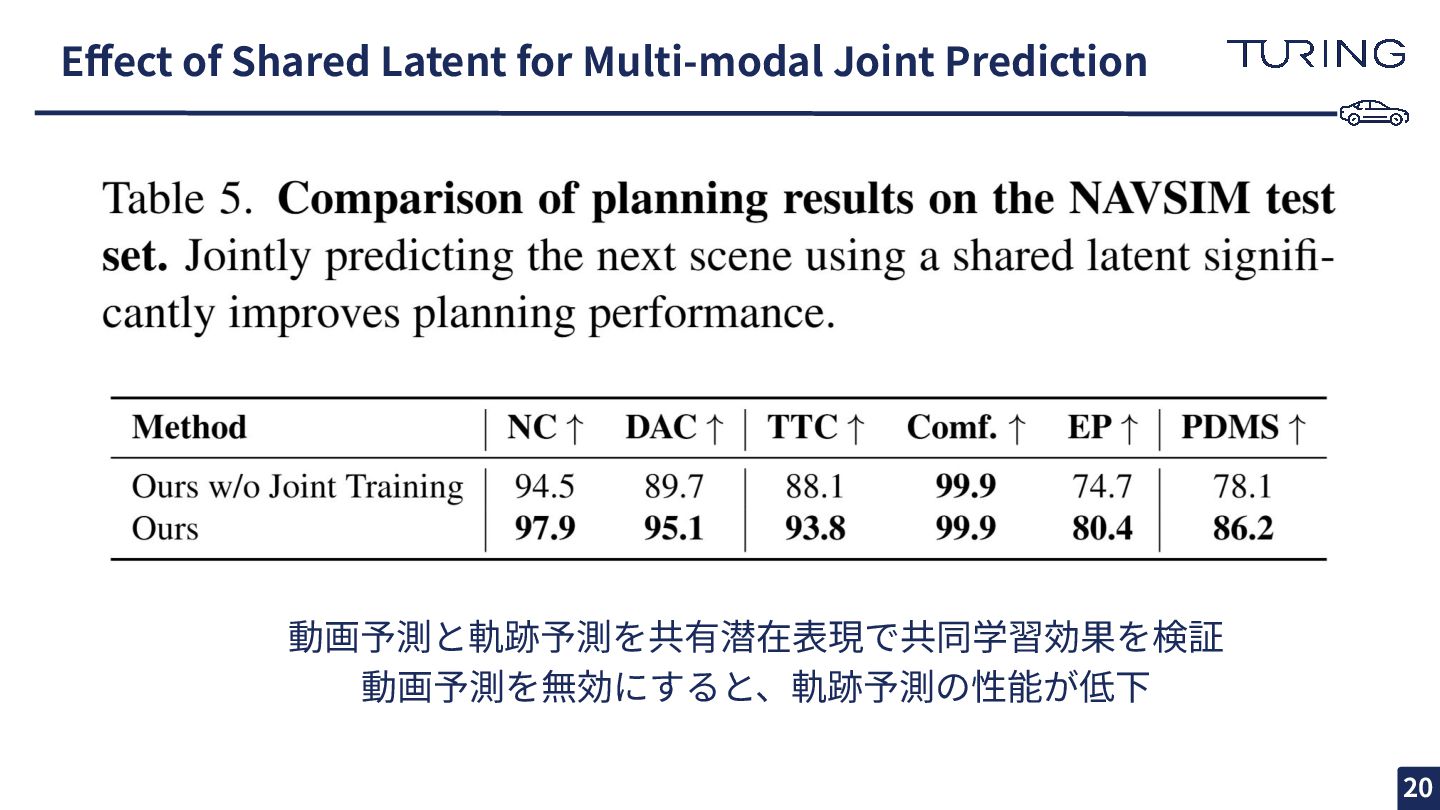
Effect of Shared Latent for Multi-modal Joint Prediction 動画予測と軌跡予測を共有潜在表現で共同学習効果を検証 動画予測を無効にすると、軌跡予測の性能が低下
20
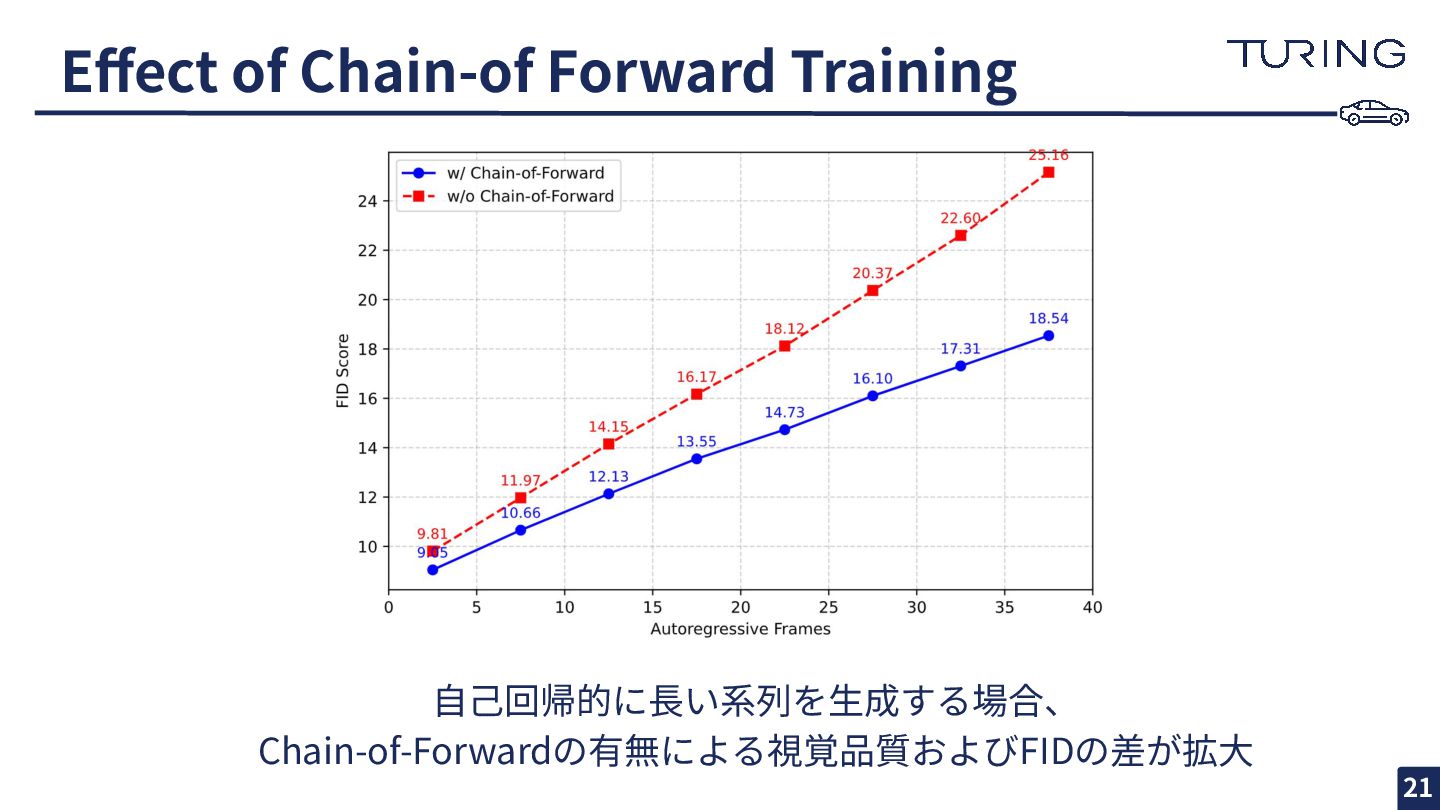
Effect of Chain-of Forward Training ⾃⼰回帰的に⻑い系列を⽣成する場合、 Chain-of-Forwardの有無による視覚品質およびFIDの差が拡⼤ 21
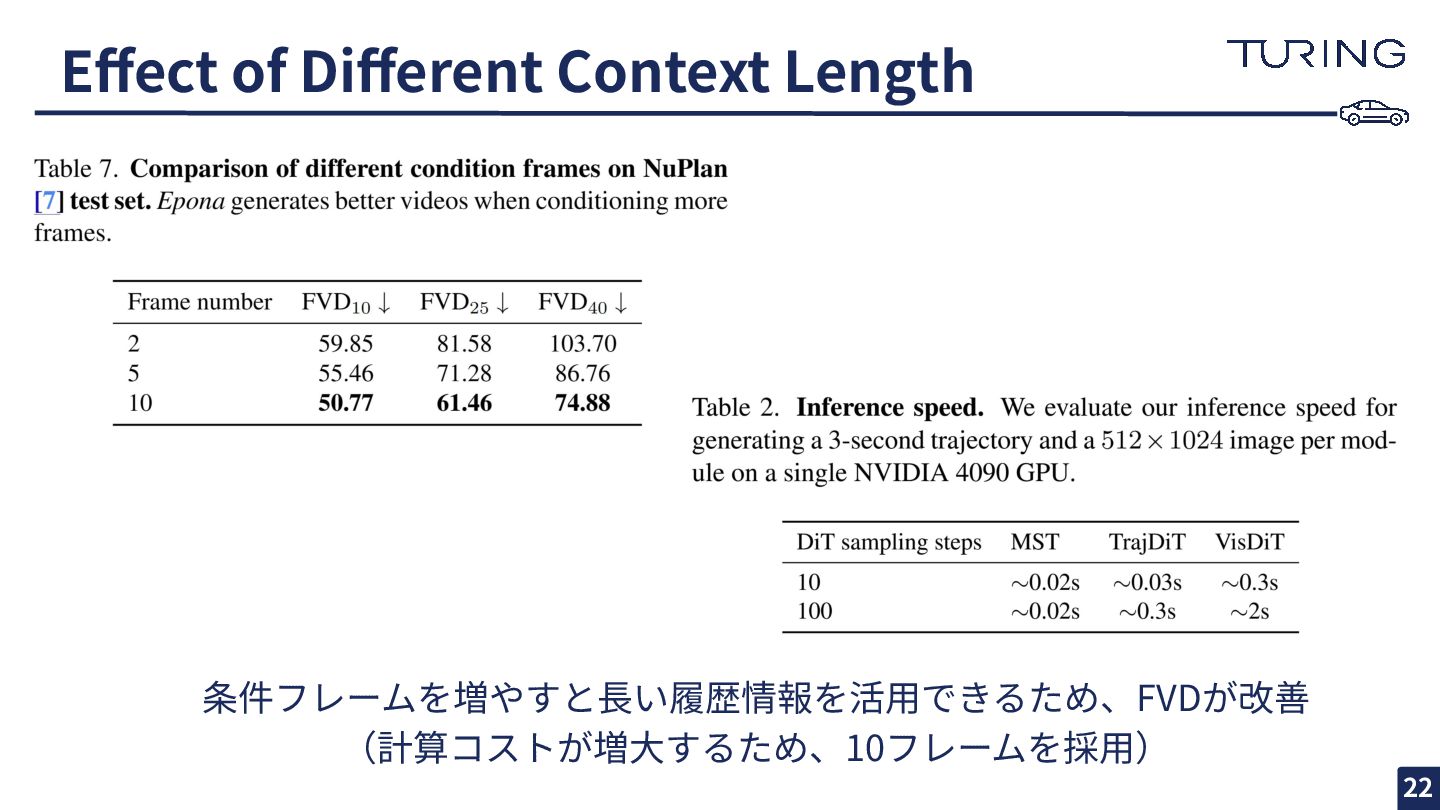
Effect of Different Context Length 条件フレームを増やすと⻑い履歴情報を活⽤できるため、FVDが改善 (計算コストが増⼤するため、10フレームを採⽤) 22
まとめ • Epona: ⾃⼰回帰拡散モデルを⽤いた⾃動運転世界モデル • 過去フレームと軌跡を条件とし、将来フレームと軌跡を同時予測 • Chain-of-Forward学習により⾃⼰回帰ドリフトを抑え、⻑尺動画を⽣成可能 • TrajDiTとVizDiTを分離する設計により、リアルタイムの軌跡⽣成が可能
23
None
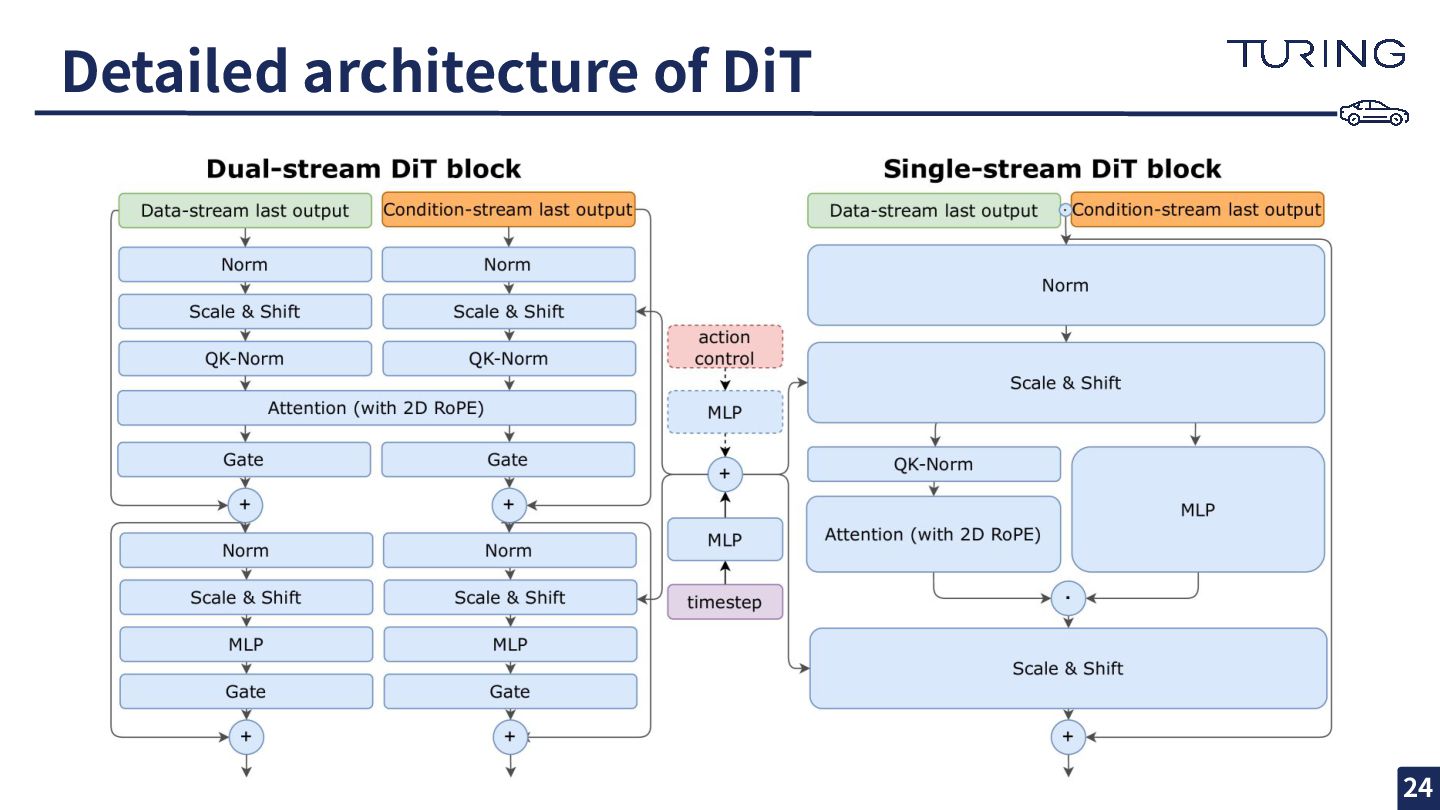
Detailed architecture of DiT 24
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}