Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
強化学習アルゴリズムPPOの改善案を考えてみた
Search
NearMeの技術発表資料です
PRO
August 22, 2025
170
0
Share
強化学習アルゴリズムPPOの改善案を考えてみた
NearMeの技術発表資料です
PRO
August 22, 2025
More Decks by NearMeの技術発表資料です
See All by NearMeの技術発表資料です
実務で役立つ幾何学 ボロノイ図の基礎から グラフ・ネットワーク応用まで
nearme_tech
PRO
0
28
SQL/ID抽出タスクから考える 実践的なハルシネーション対策
nearme_tech
PRO
0
45
OpenCode & Local LLM
nearme_tech
PRO
0
43
OpenCode Introduction
nearme_tech
PRO
0
40
【Browser Automation × AI】 Stagehandを試してみよう
nearme_tech
PRO
0
110
AIを用いた PID制御で部屋 の温度制御をしてみた
nearme_tech
PRO
0
120
CopilotKit + AG-UIを学ぶ
nearme_tech
PRO
3
460
Tile38 Overview
nearme_tech
PRO
0
90
Rust 製のコードエディタ “Zed” を使ってみた
nearme_tech
PRO
1
1.7k
Featured
See All Featured
Paper Plane
katiecoart
PRO
1
50k
YesSQL, Process and Tooling at Scale
rocio
174
15k
Music & Morning Musume
bryan
47
7.2k
Agile Leadership in an Agile Organization
kimpetersen
PRO
0
150
Designing for Performance
lara
611
70k
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
3.1k
Highjacked: Video Game Concept Design
rkendrick25
PRO
1
360
Helping Users Find Their Own Way: Creating Modern Search Experiences
danielanewman
31
3.2k
Rails Girls Zürich Keynote
gr2m
96
14k
The #1 spot is gone: here's how to win anyway
tamaranovitovic
2
1.1k
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
560
Making the Leap to Tech Lead
cromwellryan
135
9.8k
Transcript
0 強化学習アルゴリズムPPOの改善案を考えてみた 2025-08-22 第128回NearMe技術勉強会 Takuma KAKINOUE
1 概要 • 強化学習の従来のオンポリシーアルゴリズムの⽋点 ◦ 良い⾏動軌跡を⾒つけて⼀度学習しても、探索するうちに忘れてしまう • 提案⼿法 ◦ 報酬が⾼かったエピソードの各ステップの⾏動確率分布を記録する
◦ “記録した分布”と”現在の⽅策が出⼒した分布”のKLダイバージェンスを計算 ◦ 算出したKLダイバージェンスを最⼩化する項を⽬的関数に加える
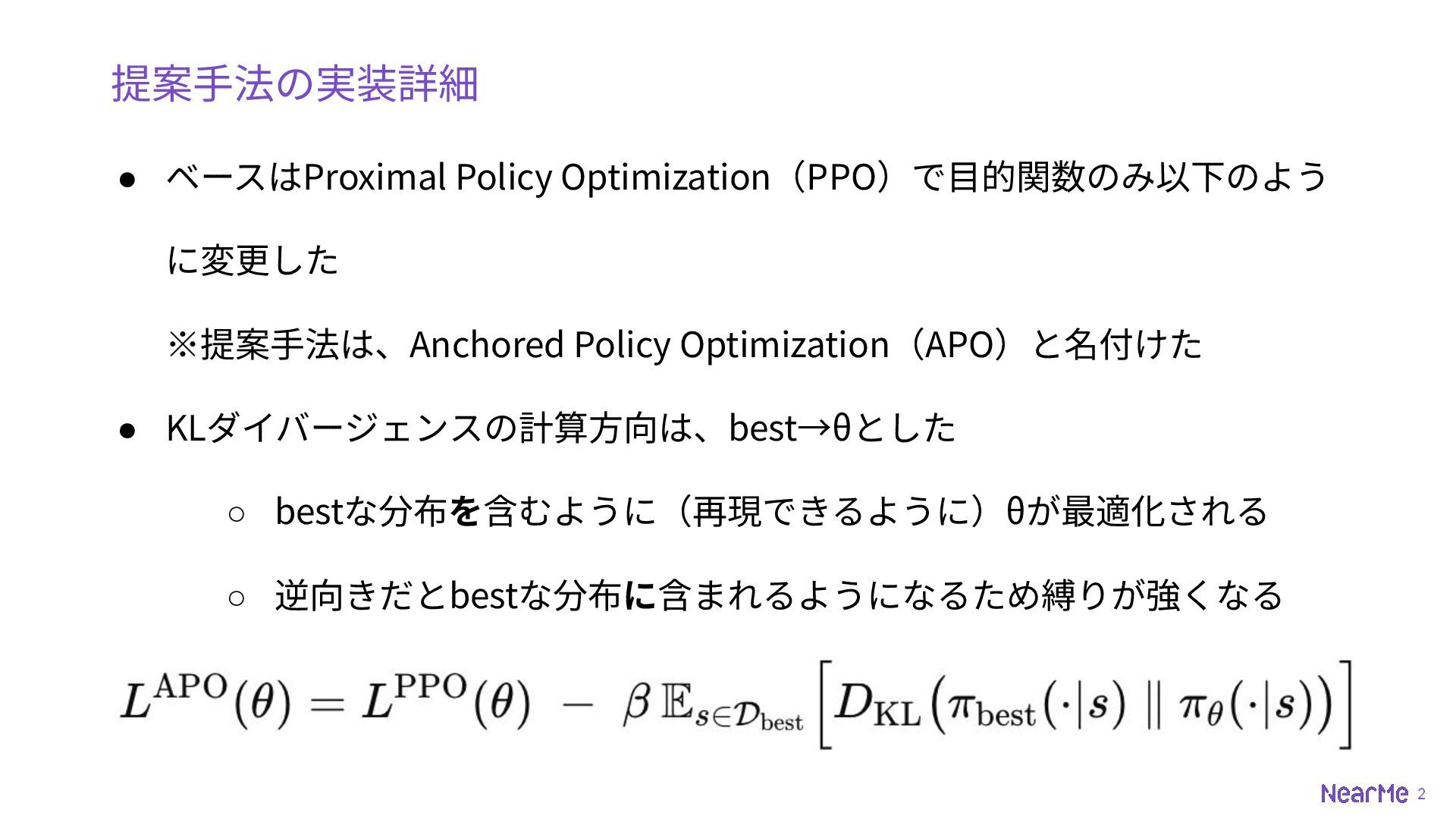
2 提案⼿法の実装詳細 • ベースはProximal Policy Optimization(PPO)で⽬的関数のみ以下のよう に変更した ※提案⼿法は、Anchored Policy Optimization(APO)と名付けた
• KLダイバージェンスの計算⽅向は、best→θとした ◦ bestな分布を含むように(再現できるように)θが最適化される ◦ 逆向きだとbestな分布に含まれるようになるため縛りが強くなる
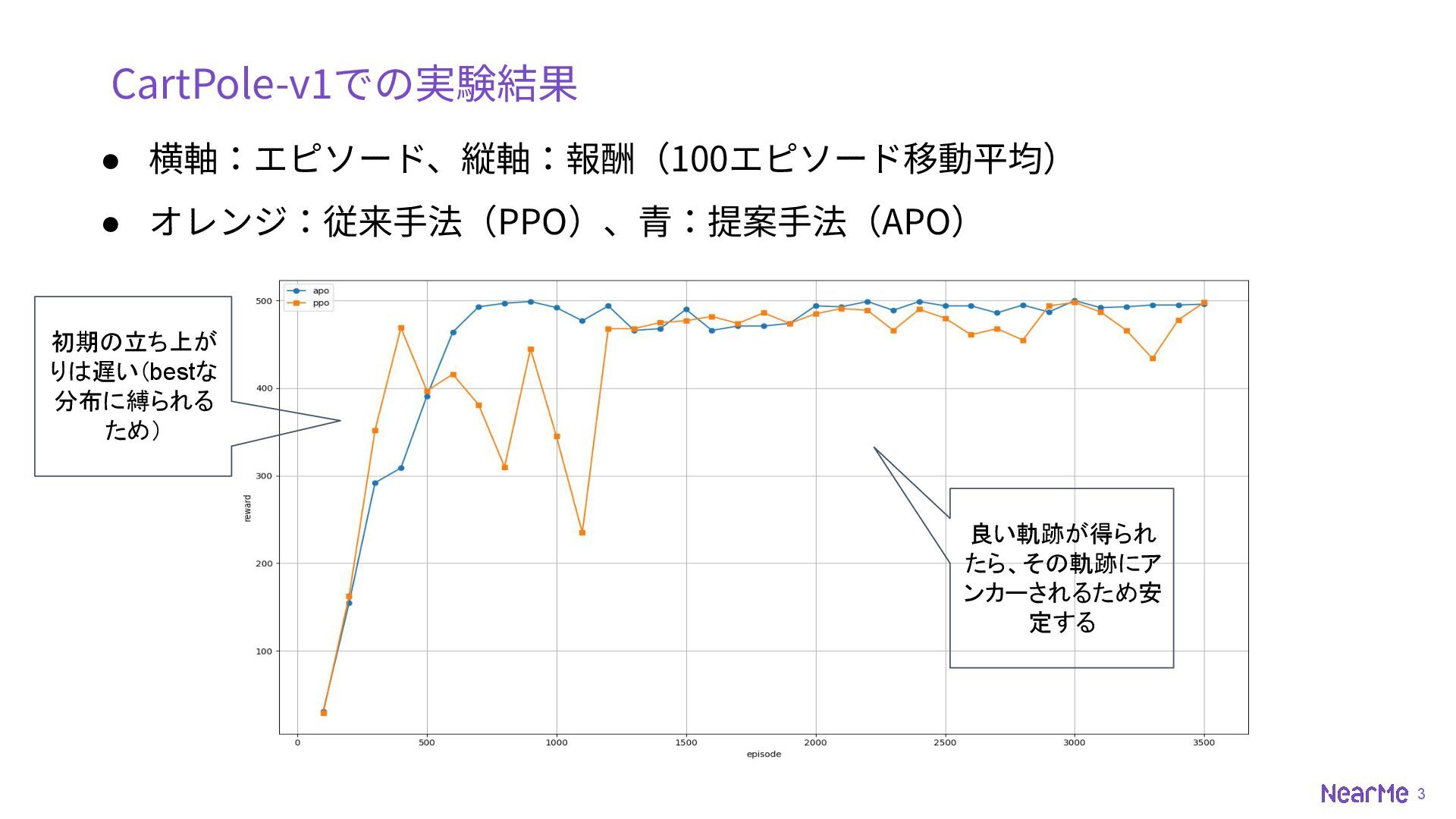
3 CartPole-v1での実験結果 • 横軸:エピソード、縦軸:報酬(100エピソード移動平均) • オレンジ:従来⼿法(PPO)、⻘:提案⼿法(APO) 初期の立ち上が りは遅い(bestな 分布に縛られる ため)
良い軌跡が得られ たら、その軌跡にア ンカーされるため安 定する
4 今後の展望 • 複数エージェントで並列化訓練させる仕組みと組み合わせてみる ◦ どれか1つのエージェントが良い⾏動軌跡を発⾒したら、他のエージェントに も共有して、良い⾏動軌跡にアンカーすることで学習の安定性と効率を向上 させる狙い • スーパーマリオなどの滅多にゴールに辿り着けない環境で真価を発揮するのでは
ないかと考えているので実験してみる
5 Thank you
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}