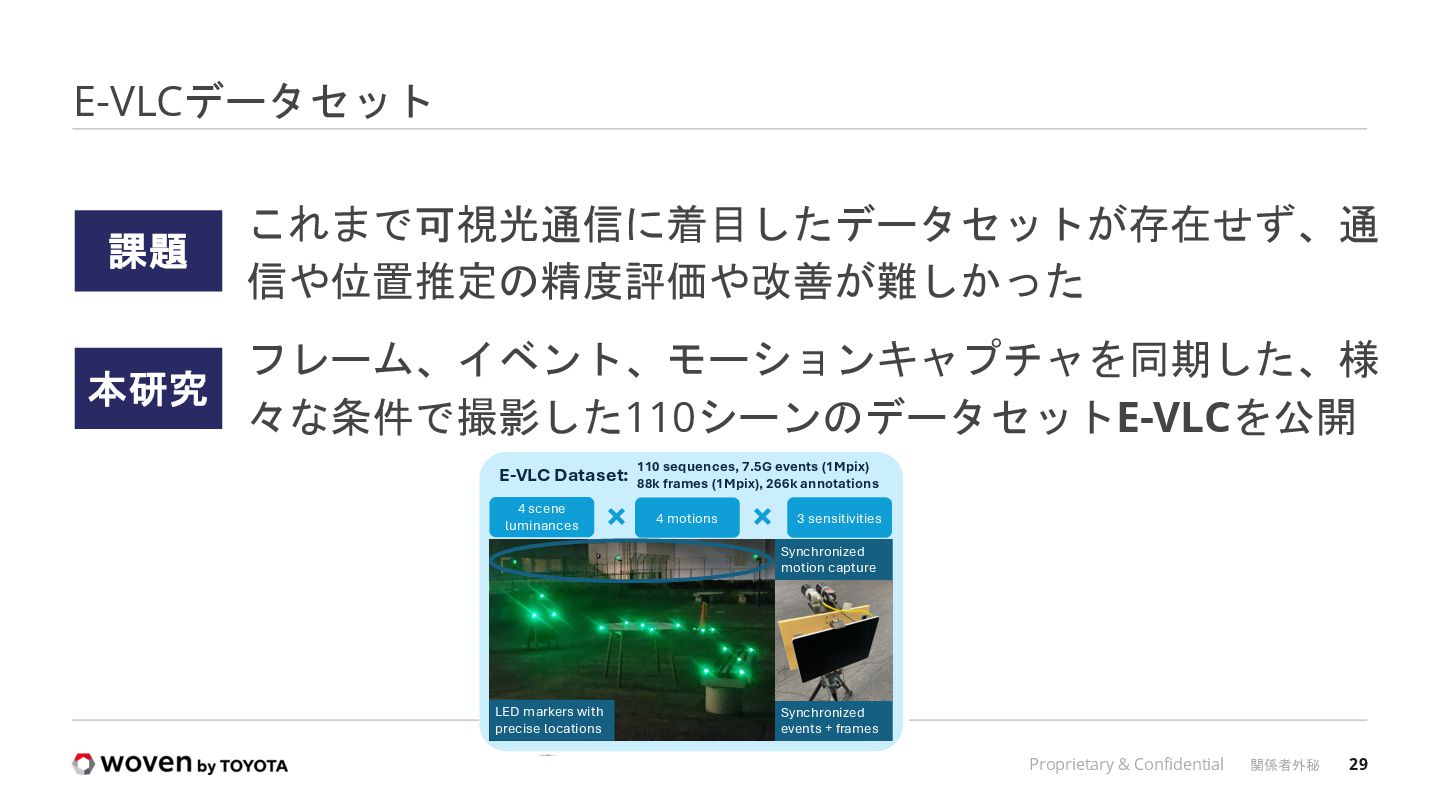
by Toyota での取り組み|論文情報まとめ “E-VLC: A Real-World Dataset for Event-based Visible Light Communication And Localization”, Shiba S., Kong Q., Kobori N., CVPRW2025 “Augmented Reality Applications Using Active Markers With An Event Camera”, Shiba S., Kong Q., Kobori N., CVPRW2025 https://woven-visionai.github.io/evlc-dataset/ ”Evaluation of Mobile Environment for Vehicular Visible Light Communication Using Multiple LEDs and Event Cameras”, Soga R., Shiba S., Kong Q., Kobori N., Shimizu T., Lu S., Yamazato T, IEEE IV 2025. ”Distance Estimation in Outdoor Driving Environments Using Phase-only Correlation Method with Event Cameras”, Kobayashi M., Shiba S., Kong Q., Kobori N., Shimizu T., Lu S., Yamazato T, IEEE IV 2025. 他、電気情報通信学会 総合大会 2025等
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}