Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Making JetBot
Search
masa-ita
August 24, 2019
Technology
220
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Making JetBot
masa-ita
August 24, 2019
More Decks by masa-ita
See All by masa-ita
Ollamaを使ったLocal Language Model活用法
itagakim
1
240
Run Instant NeRF on Docker
itagakim
1
2.4k
3D Clustering and Metric Learning
itagakim
0
410
Cloud TPUの使い方〜BigBirdの日本語学習済みモデルを作る〜
itagakim
0
750
多言語学習済みモデルmT5とは?
itagakim
1
790
AWSのGPUを安く使って TensorFlowモデルを訓練する方法
itagakim
0
420
最近の自然言語処理モデルの動向
itagakim
1
590
ディープラーニングで芸術はできるか? 〜生成系ネットワークの進展〜
itagakim
0
380
AWSとTerraform初心者が やってみたこと
itagakim
1
530
Other Decks in Technology
See All in Technology
ウォーターフォール開発案件のPMとしてAI活用を模索している話
hatahata021
3
250
【CEDEC2026】ゲームシナリオライターを支援するAIツール開発の実践 ― 設計とプロンプトの工夫 ―
cygames
PRO
1
160
事業成長とAI活用を止めないデータ基盤アーキテクチャの設計思想
hiracky16
0
790
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
610
QAタスクをスキル化したいときに考えること
aomoriringo
0
140
信頼できるテスティングAIをどう育てるか?
odan611
0
180
数値で見る Microsoft MVP 〜Spec Kit と GitHub Copilot Agent で作るデータ可視化ダッシュボード〜
yutakaosada
0
180
DevOps Agentで運用判断をチーム資産にする ~Agent InstructionsとAgent Skillを継続的に育てる~
fujioka6789
0
180
WEBフロントエンド研修【MIXI 26新卒技術研修】
mixi_engineers
PRO
2
900
Webの技術とガジェットで子どもも大人も楽しめるワクワク体験を提供する / Qiita Tech Festa Day 2026
you
PRO
1
330
20260801_スクフェス大阪
kgnkhkr
0
330
AIツールを導入しても生産性はあがらない? カオナビが直面した 3つの壁と乗り越え方。/ Overcoming 3 Barriers to AI-Driven Productivity at kaonavi
kaonavi
0
1.3k
Featured
See All Featured
個人開発の失敗を避けるイケてる考え方 / tips for indie hackers
panda_program
123
22k
ピンチをチャンスに:未来をつくるプロダクトロードマップ #pmconf2020
aki_iinuma
128
56k
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
410
Navigating the Design Leadership Dip - Product Design Week Design Leaders+ Conference 2024
apolaine
1
380
The Pragmatic Product Professional
lauravandoore
37
7.4k
It's Worth the Effort
3n
188
29k
How to Talk to Developers About Accessibility
jct
2
460
Speed Design
sergeychernyshev
33
2k
Building Adaptive Systems
keathley
44
3.2k
Collaborative Software Design: How to facilitate domain modelling decisions
baasie
1
270
How to train your dragon (web standard)
notwaldorf
97
6.7k
Unsuck your backbone
ammeep
672
58k
Transcript
JETSON NANOで ⾃律⾛⾏ロボットJETBOTを 作ってみた 板垣 正敏 2019/8/24 PYTHON機械学習勉強会 IN 新潟
RESTART #8
前回のLTから
GOOGLE EDGE TPU 板垣正敏 @PYTHON機械学習勉強会IN新潟 2019/6/1
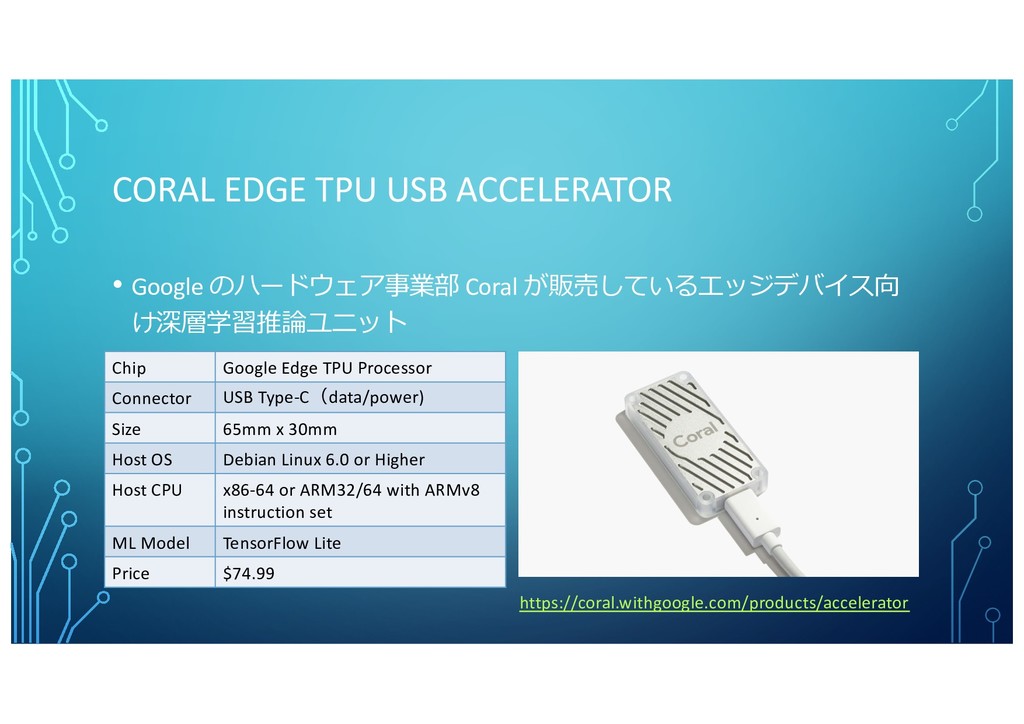
CORAL EDGE TPU USB ACCELERATOR https://coral.withgoogle.com/products/accelerator Chip Google Edge TPU
Processor Connector USB Type-C(data/power) Size 65mm x 30mm Host OS Debian Linux 6.0 or Higher Host CPU x86-64 or ARM32/64 with ARMv8 instruction set ML Model TensorFlow Lite Price $74.99 • Google のハードウェア事業部 Coral が販売しているエッジデバイス向 け深層学習推論ユニット
対抗⾺登場︕NVIDIA JETSON NANO https://developer.nvidia.com/embedded/buy/jetson-nano-devkit GPU 128-core Maxwell CPU Quad-core ARM
A57 @ 1.43 GHz Memory 4 GB 64-bit LPDDR4 25.6 GB/s Storage microSD Connector Gigabit Ether/HDMI/USB/ Camera I/O GPIO/I2C/I2S/SPI/UART OS Debian Price $99.00 https://developer.nvidia.com/embedded/jetson- nano-dl-inference-benchmarks
きっかけ
第33回⼈⼯知能学会@新潟 • NVIDIAの出展していたブースで • 私「GoogleのEdge-TPUは買ったんですけど」 • NVIDIAの⼈「Jetson Nano 開発キットはUSB 3.0なので、Edge
TPUも早い ですよ。Edge TPUを刺して両⽅使っている⼈もいますよ」 • 私「なるほど︕」
JETBOTも 動いてました • Jetson Nanoを搭載した⾃ 律⾛⾏ロボット • パーツリストと組み⽴て ⽅が公開されている •
ソフトウェアはOSイメー ジをダウンロード • ボディは3Dプリンタ⽤の データが公開
3Dプリンタが無いとできないの︖ • そもそも持ってないし使ったことも無い • ⻑岡のNaDeC BASEで借りるには講習会受講が必要かあ • 8/14の回に申し込み → 受講しました︕
• でも8/24には間に合いそうにないなあ • 新潟エスラボの⽥中さんがやってる「荻川ITラボ」で借りられるか も︖ • 相談したら「有料で良ければ出⼒してあげるよ」→ 速攻「お願いします︕」
荻川IT⼯房 • 新潟エスラボの事務 所兼コミュニティス ペース http://niigata-sl.com/ogikawaitkoubou
やってみた︕私の失敗と注意点
参照サイト • オージス総研のブログ • https://www.ogis-ri.co.jp/otc/hiroba/technical/lets-try-jetbot/part1.html • 本家GitHub/Wiki • https://github.com/NVIDIA-AI-IOT/jetbot
部品購⼊ • 基本はオージス総研のブログのリストから • Cameraモジュールのリンク先が違った︕ • https://www.amazon.co.jp/gp/product/B01ER2SKFS/ が適切 • PiO
LED ディスプレイがマルツで在庫なし • スイッチサイエンスで購⼊ https://www.switch- science.com/catalog/3393/
部品リストにないもの • ⼯具 • ハンダゴテ、ニッパー、ケーブルストリッパー、ドライバー、ヤスリ等 • ブログ・Wiki参照 • ネジ(本家Wikiにはある) •
私の場合 リストのM2 8mmは⻑すぎ(鍋ネジだったのでなおさら) • M2 6mm ⽫ネジがフィット • パッチケーブル • オスーメス(オス)✕ 4本(モーター接続⽤) • メスーメス ✕ 4本(モータードライバ接続⽤)
私の失敗 • はんだ付けも久しぶり • モータードライバで何度も失敗 • 3pinと2pinの位置を2度取り違え • ターミナルブロックの⽳の⽅向を間違え •
1度はんだ付けしたものを抜いて再挿⼊する のに四苦⼋苦 • ハンダゴテの熱でLSIが壊れていないかヒヤ ヒヤ
あったほうが 良いもの lモータードライバは⼩さ な基盤なので、固定でき ないと作業が難しい lたいてい両⼿がふさがっ ているし、熱伝導で熱く なるので、⼿で押さえる のは困難 https://www.amazon.co.jp/gp/product/B004NXTW18/
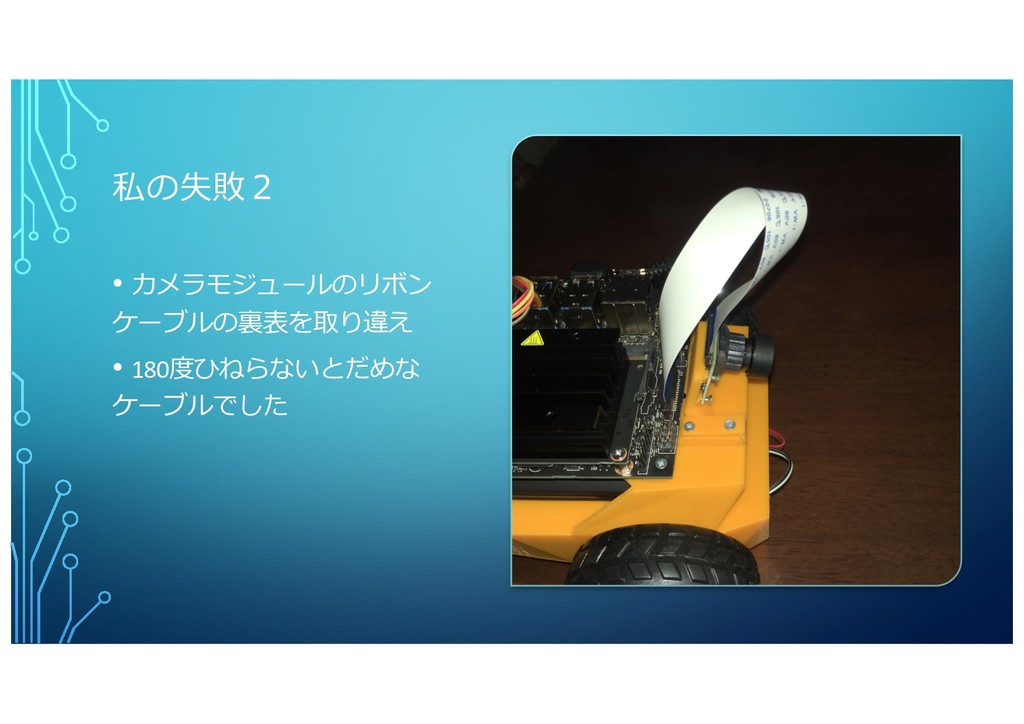
私の失敗2 • カメラモジュールのリボン ケーブルの裏表を取り違え • 180度ひねらないとだめな ケーブルでした
なんとか完 成︕ • ちょっとUSB電源 ケーブルが⻑すぎ て邪魔ですが…
デモ
JET RACER 登場 • Donkey Carと似たレーサー • LaTraxあるいはTamiyaのラ ジコンカーベース •
JetBotより⾼速で、ステア リングの他にスロットリ ングも可能
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}