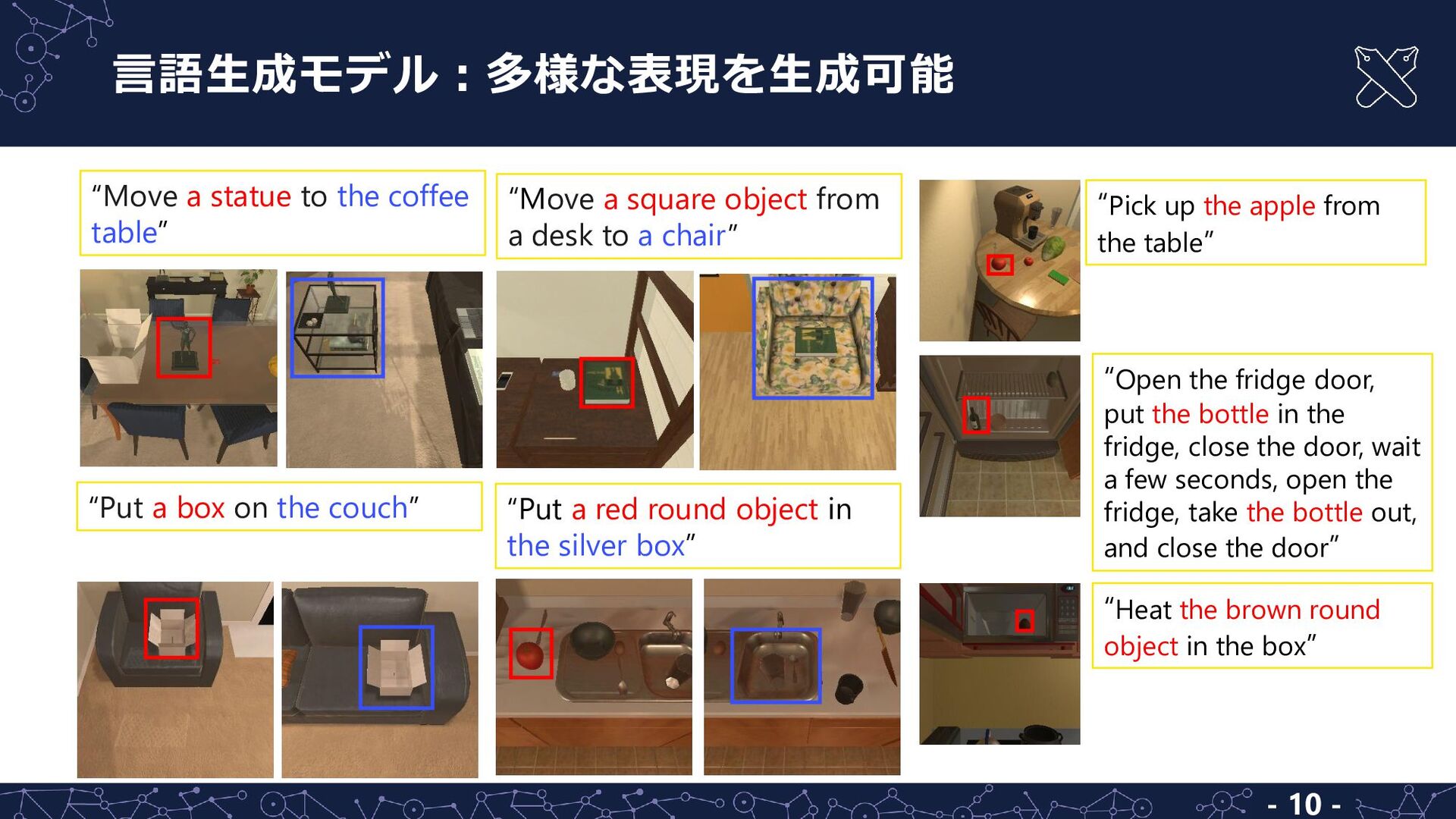
chair” “Put a box on the couch” “Move a statue to the coffee table” “Pick up the apple from the table” “Open the fridge door, put the bottle in the fridge, close the door, wait a few seconds, open the fridge, take the bottle out, and close the door” “Heat the brown round object in the box” “Put a red round object in the silver box” - 10 -
{kind=link}
{kind=link}
{kind=link}
![関連研究:Fetch-and-carryタスクに関連するフレームワーク ・手法は多く存在 手法 概要 REVERIE [Qi+, CVPR20] 高レベルな指示文を含むREVERIEベンチマークを提案 ALFRED [Shridhar+,](https://files.speakerdeck.com/presentations/bbcfcd8eb4ce42bf99284084a4929829/slide_3.jpg){kind=link}
{kind=link}
![既存手法の課題:離散的な行動の生成に留まる FILM [Min+, ICLR22] ALFREDやREVERIE等のシミュレーションにおけるベンチマークについて, 多くの既存手法が存在 VLN-DUET [Chen+, CVPR22] 多くは離散的な行動(move,](https://files.speakerdeck.com/presentations/bbcfcd8eb4ce42bf99284084a4929829/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
![タスク生成システム: クロスモーダル言語生成モデルを利用 対象領域 目標領域 画像中の領域群 … CRT [Kambara+, RA-L21] 出力:”Put](https://files.speakerdeck.com/presentations/bbcfcd8eb4ce42bf99284084a4929829/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![提案手法がタスク成功率でベースライン手法を上回る 手法 Navigation 成功率 [%] OLR 正解率 [%] Fetching 成功率](https://files.speakerdeck.com/presentations/bbcfcd8eb4ce42bf99284084a4929829/slide_16.jpg){kind=link}
![提案手法がタスク成功率でベースライン手法を上回る 手法 Navigation 成功率 [%] OLR 正解率 [%] Fetching 成功率](https://files.speakerdeck.com/presentations/bbcfcd8eb4ce42bf99284084a4929829/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![マルチモーダル言語理解モデルについても,ベースライン 手法を上回る結果 - 22 - 手法 対象物体 正解率 [%] 目標領域](https://files.speakerdeck.com/presentations/bbcfcd8eb4ce42bf99284084a4929829/slide_21.jpg){kind=link}
{kind=link}