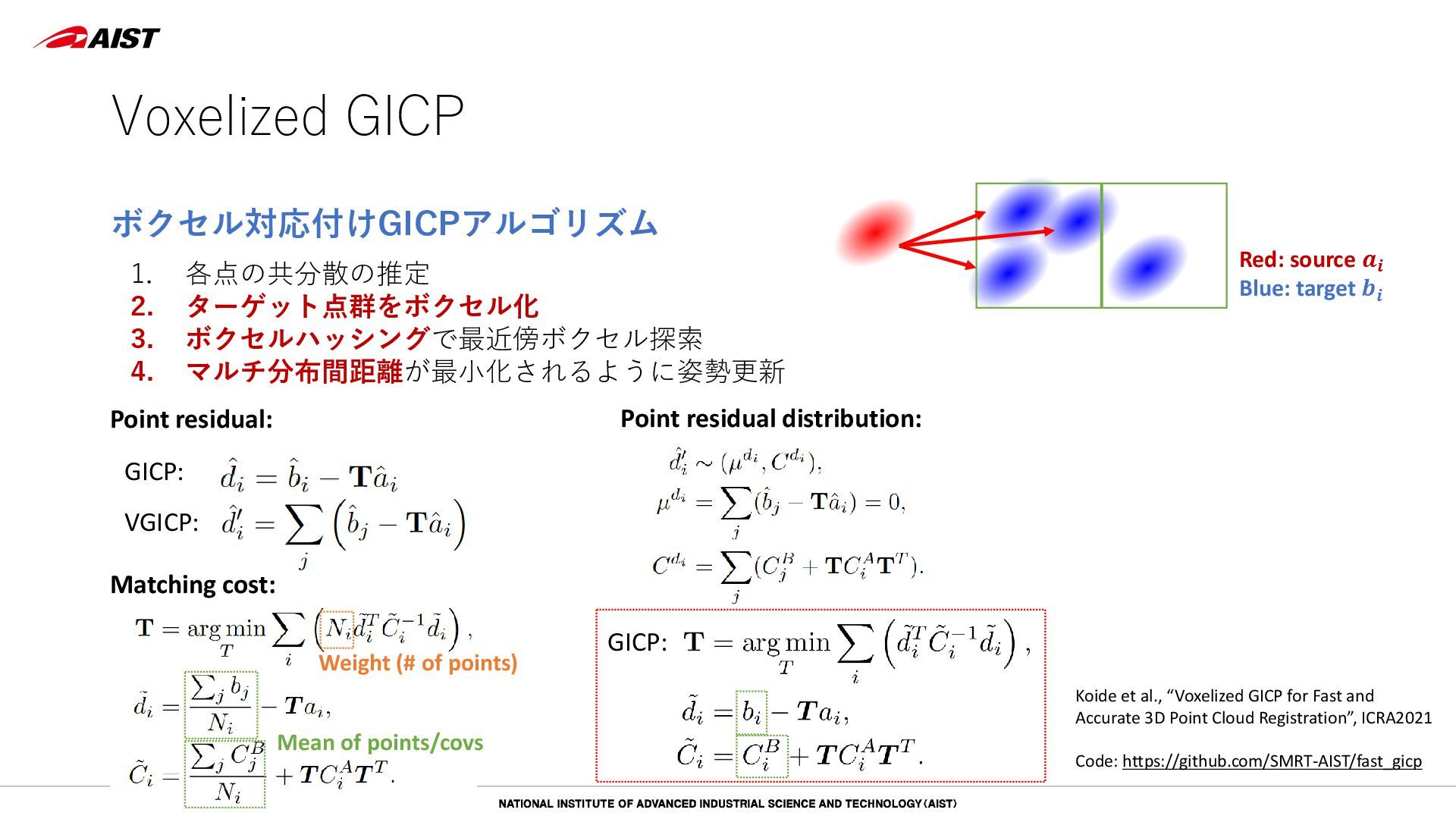
ボクセル対応付けGICPアルゴリズム Koide et al., “Voxelized GICP for Fast and Accurate 3D Point Cloud Registration”, ICRA2021 Matching cost: Point residual: GICP: VGICP: Point residual distribution: GICP: Weight (# of points) Mean of points/covs Red: source 𝒂𝒂𝒊𝒊 Blue: target 𝒃𝒃𝒊𝒊 Code: https://github.com/SMRT-AIST/fast_gicp
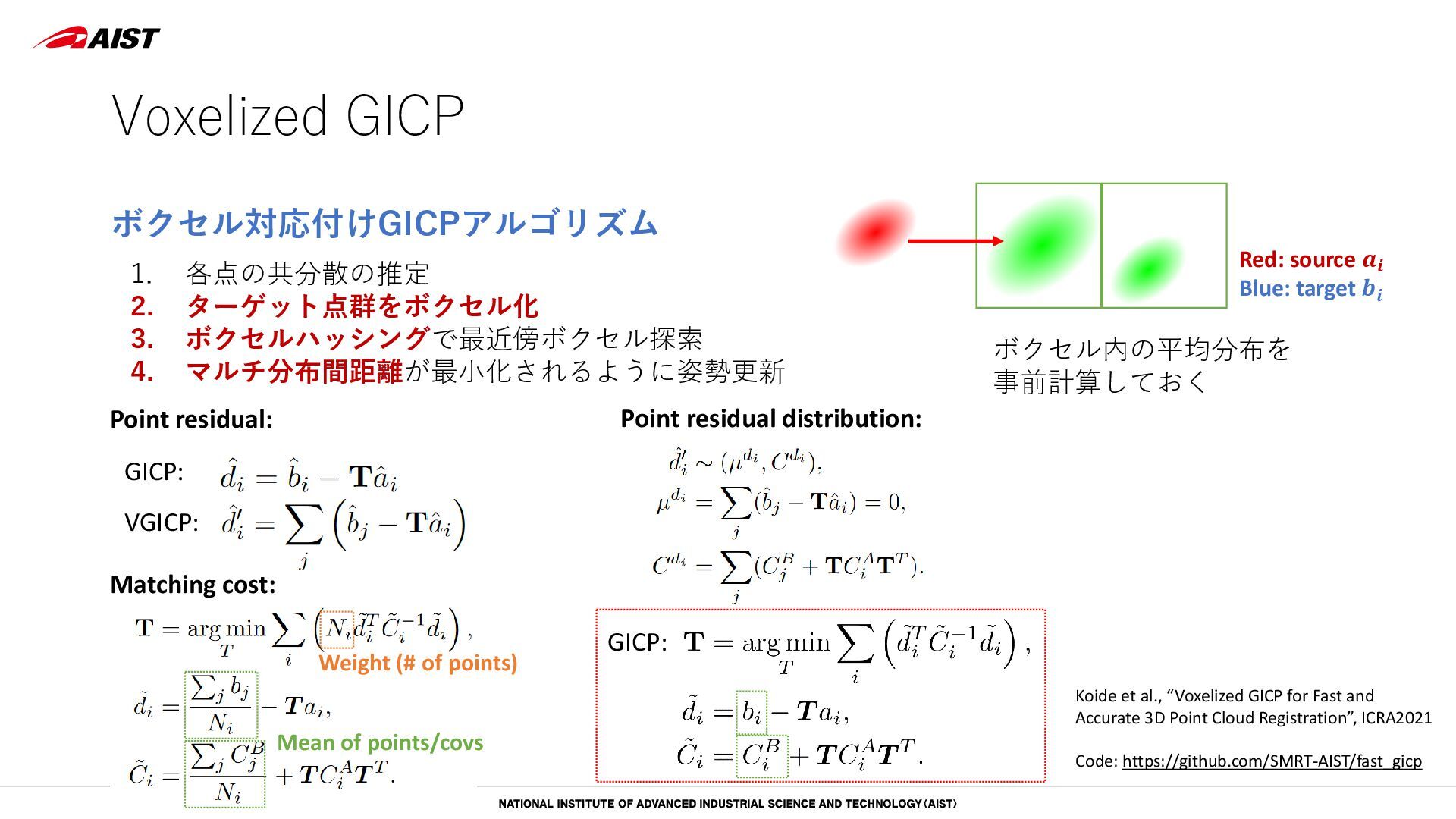
ボクセル対応付けGICPアルゴリズム Koide et al., “Voxelized GICP for Fast and Accurate 3D Point Cloud Registration”, ICRA2021 Matching cost: Point residual: GICP: VGICP: Point residual distribution: GICP: Weight (# of points) Mean of points/covs Red: source 𝒂𝒂𝒊𝒊 Blue: target 𝒃𝒃𝒊𝒊 Code: https://github.com/SMRT-AIST/fast_gicp ボクセル内の平均分布を 事前計算しておく
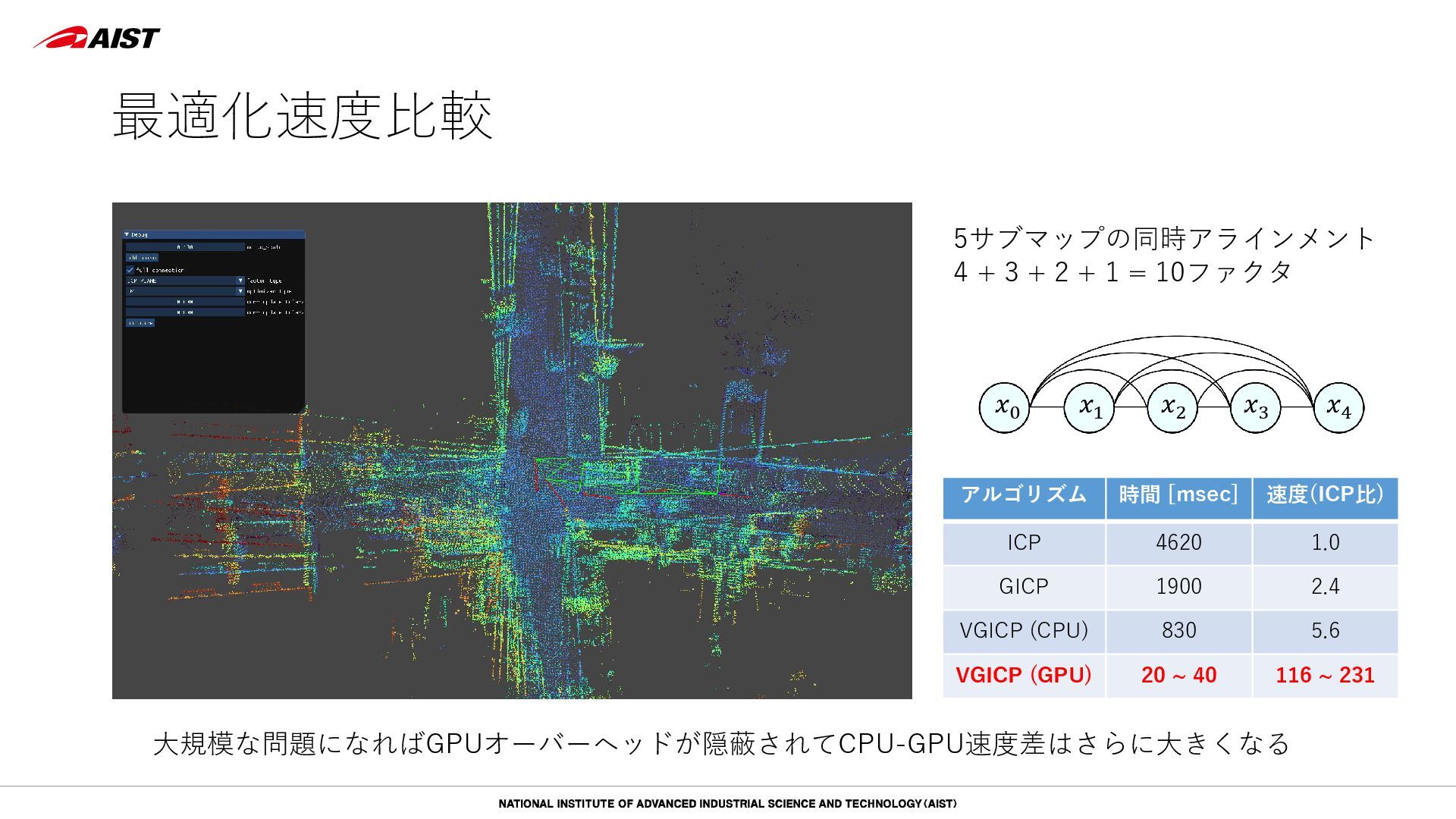
![大域マッチングコスト最小化とLiDAR-IMU タイトカップリングに基づく三次元地図生成 産業技術総合研究所 モバイルロボティクス研究チーム 小出健司 Mail: [email protected] Web: https://staff.aist.go.jp/k.koide/](https://files.speakerdeck.com/presentations/1d9c54d0fe2d4716ba110efebdede013/slide_0.jpg){kind=link}
{kind=link}
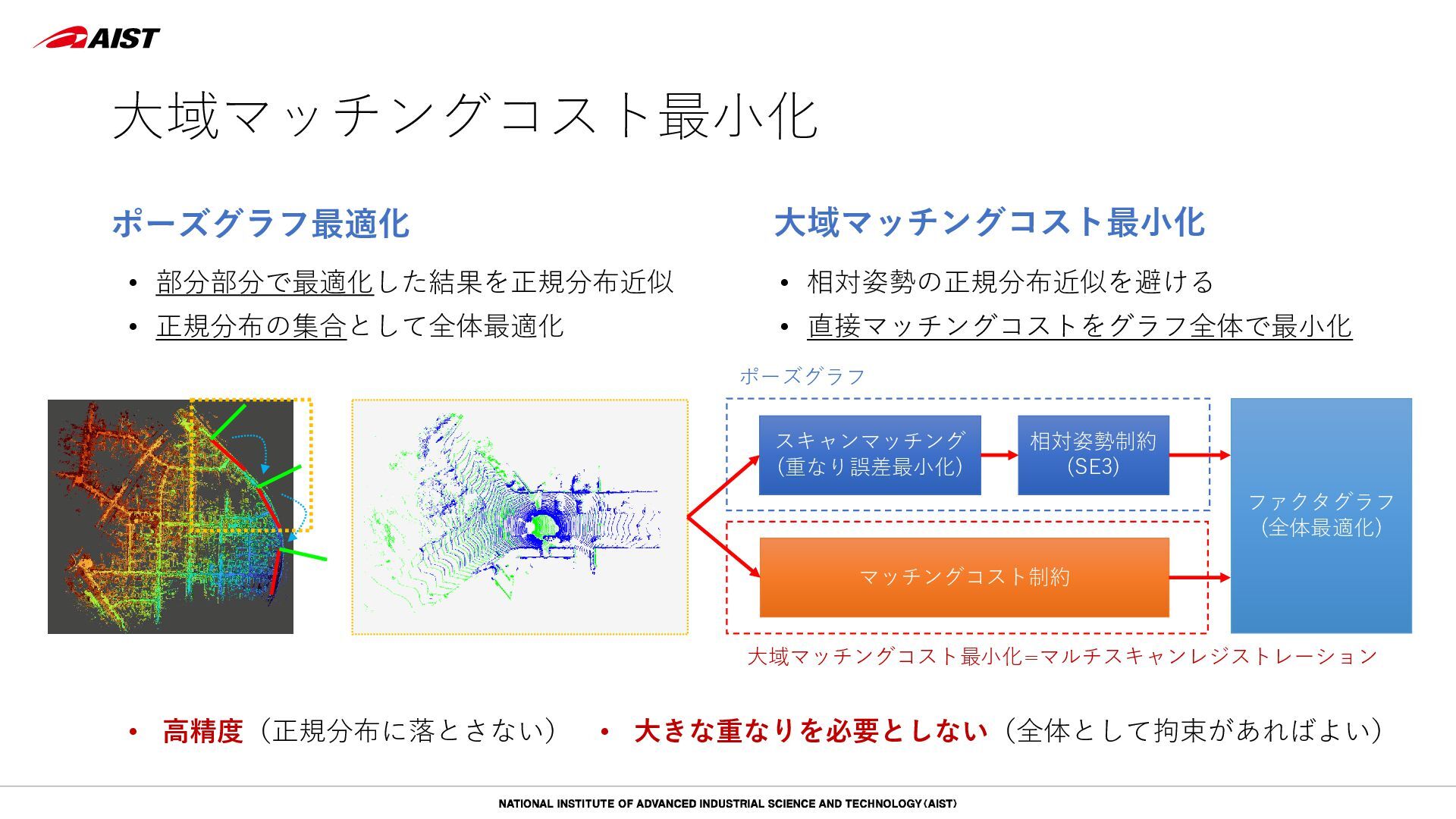
![本研究の提案 (1/2) • 近似の強い相対姿勢制約(ポーズグラフ)を排し,地図全体のマッチングコストを直接最小化する • 重なりのごくわずかな点群間に高精度に拘束をかけ,GPUを活用し超高速にグラフを最適化する 大域マッチングコスト最小化 [SuMa, RSS2018] Proposed](https://files.speakerdeck.com/presentations/1d9c54d0fe2d4716ba110efebdede013/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}