Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ros-on-the-rocks-thursday-april-17
Search
Daniel Packard
April 07, 2014
Technology
60
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ros-on-the-rocks-thursday-april-17
An abbreviated introduction to the ROS framework.
Daniel Packard
April 07, 2014
More Decks by Daniel Packard
See All by Daniel Packard
ros-on-the-rocks-wednesday-jan-29
pack3754
1
93
Arduino 101
pack3754
0
160
Other Decks in Technology
See All in Technology
AI、CDK と協働する Full TypeScript アプリケーション開発 / Full TypeScript Application with AI and CDK
geekplus_tech
2
400
“それは自分の仕事じゃない"を 越えて行け
yuukiyo
1
480
Webアプリ認証の全体像 / The Big Picture of Web App Authentication
kitano_yuichi
0
150
AI Agent SaaS を支える自社仮想化基盤への挑戦と実運用 / ai-agent-saas-virtualization
flatt_security
3
4.2k
LLMやAIエージェントをソフトウェアに組み込むプラクティス
shibuiwilliam
2
420
Terraform共通モジュールをチーム横断で“変えられる”運用へ ― リリースと適用の分離
kekke_n
1
3.4k
関数型の考えを TypeScript に持ち込んで、テストしやすい純粋関数を増やす / Pure at the Core, Effects at the Edge: Bringing Functional Thinking into TypeScript
kaminashi
2
130
壊して学ぶAWS CDK: そのcdk deployで消えるもの、残るもの
k_adachi_01
1
420
AI時代のYAGNI:「爆速で無駄になった機能」からの学び / 20260720 Naoki Takahashi
shift_evolve
PRO
3
330
[2026-07-15] AI Ready なはずだったアーキテクチャと、見えてきた課題・次に目指す状態
wxyzzz
9
4k
Amazon EVS で VCF 9.0 / 9.1 のサポート開始まとめ
mtoyoda
0
310
AIと共生する開発者プラットフォーム:バクラクのモノレポ×マイクロサービス基盤
sakajunquality
2
3.9k
Featured
See All Featured
Art, The Web, and Tiny UX
lynnandtonic
304
22k
Tell your own story through comics
letsgokoyo
1
1k
RailsConf & Balkan Ruby 2019: The Past, Present, and Future of Rails at GitHub
eileencodes
141
35k
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
460
The SEO Collaboration Effect
kristinabergwall1
1
510
コードの90%をAIが書く世界で何が待っているのか / What awaits us in a world where 90% of the code is written by AI
rkaga
62
45k
Believing is Seeing
oripsolob
1
170
10 Git Anti Patterns You Should be Aware of
lemiorhan
PRO
659
62k
エンジニアに許された特別な時間の終わり
watany
108
250k
Sam Torres - BigQuery for SEOs
techseoconnect
PRO
0
300
JAMstack: Web Apps at Ludicrous Speed - All Things Open 2022
reverentgeek
1
500
Learning to Love Humans: Emotional Interface Design
aarron
275
41k
Transcript
O N T H E R O C K S
ROS April 2014
April 2014 O N T H E R O C
K S ROS O N T H E R O C K S ROS
What is ROS?
What is ROS? ROS is the: Robot Operating System
What is ROS? … but it’s not really an operating
system ROS is the: Robot Operating System
What is ROS? ROS is a software framework for developing
advanced robotic systems. … but it’s not really an operating system ROS is the: Robot Operating System
Anatomy of a Robot
Anatomy of a Robot Sensors Actuators Processors
Anatomy of a Robot
Anatomy of a Robot
Enter ROS ROS helps you structure your robotics applications.
Enter ROS The basic unit of a ROS application is
a ROS node…
Enter ROS The basic unit of a ROS application is
a ROS node… NODE
Enter ROS The basic unit of a ROS application is
a ROS node… NODE
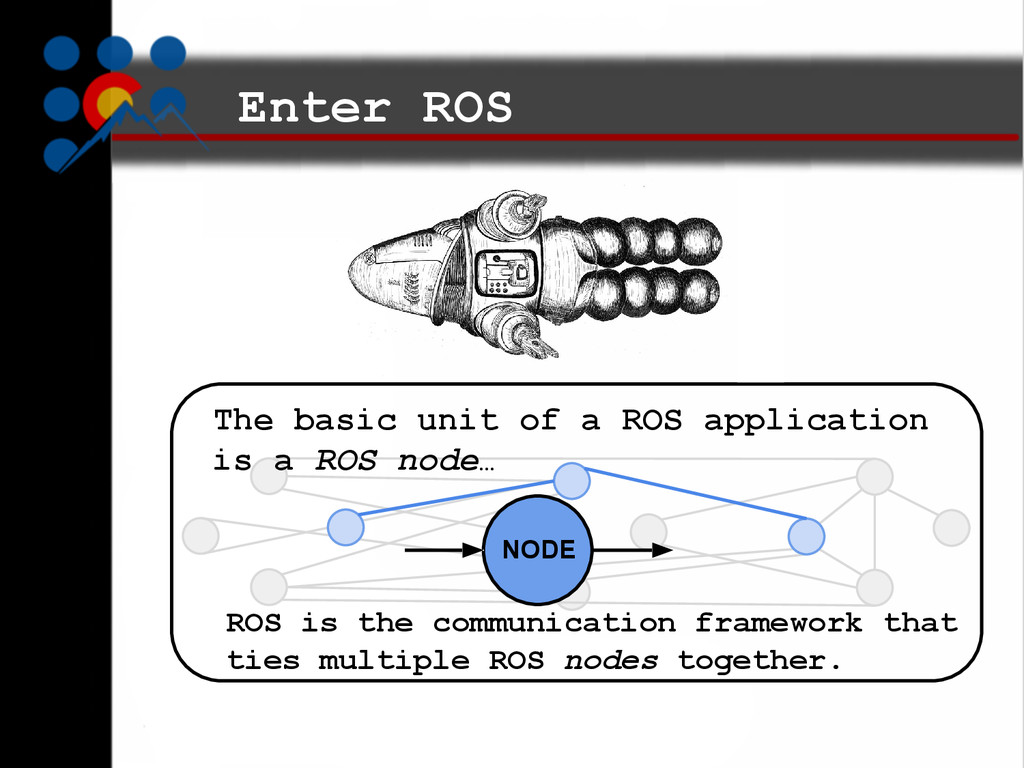
Enter ROS ROS is the communication framework that ties multiple
ROS nodes together. The basic unit of a ROS application is a ROS node… NODE
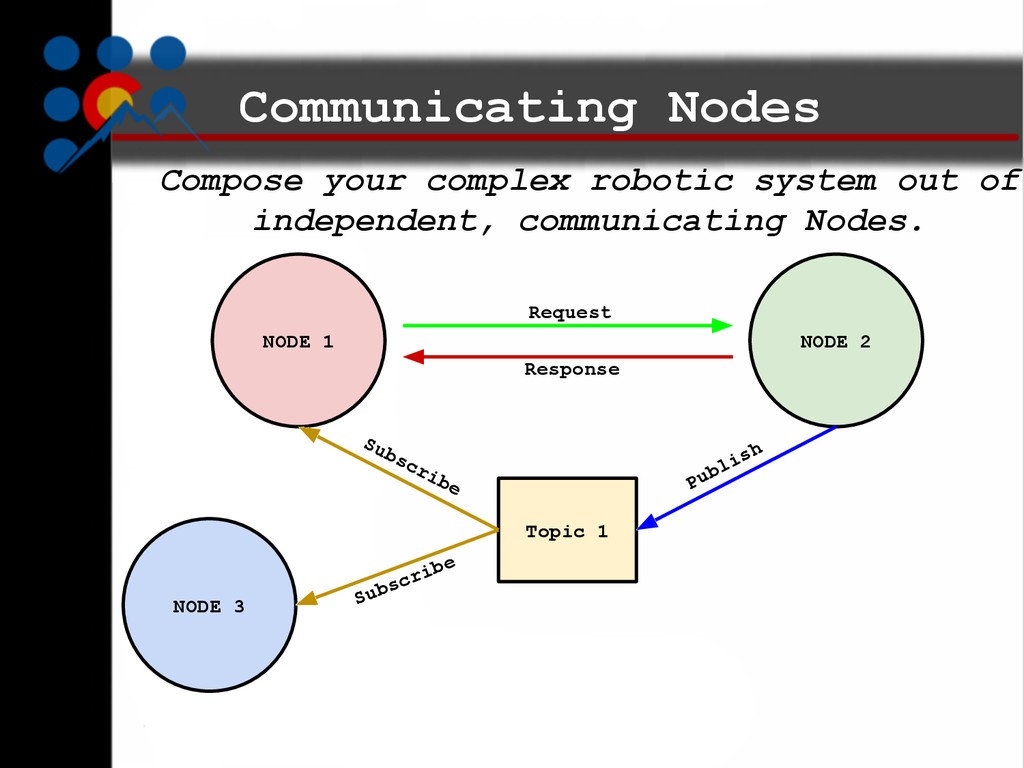
Communicating Nodes NODE 1 NODE 2 Request Response Topic 1
Subscribe Publish NODE 3 Subscribe Compose your complex robotic system out of independent, communicating Nodes.
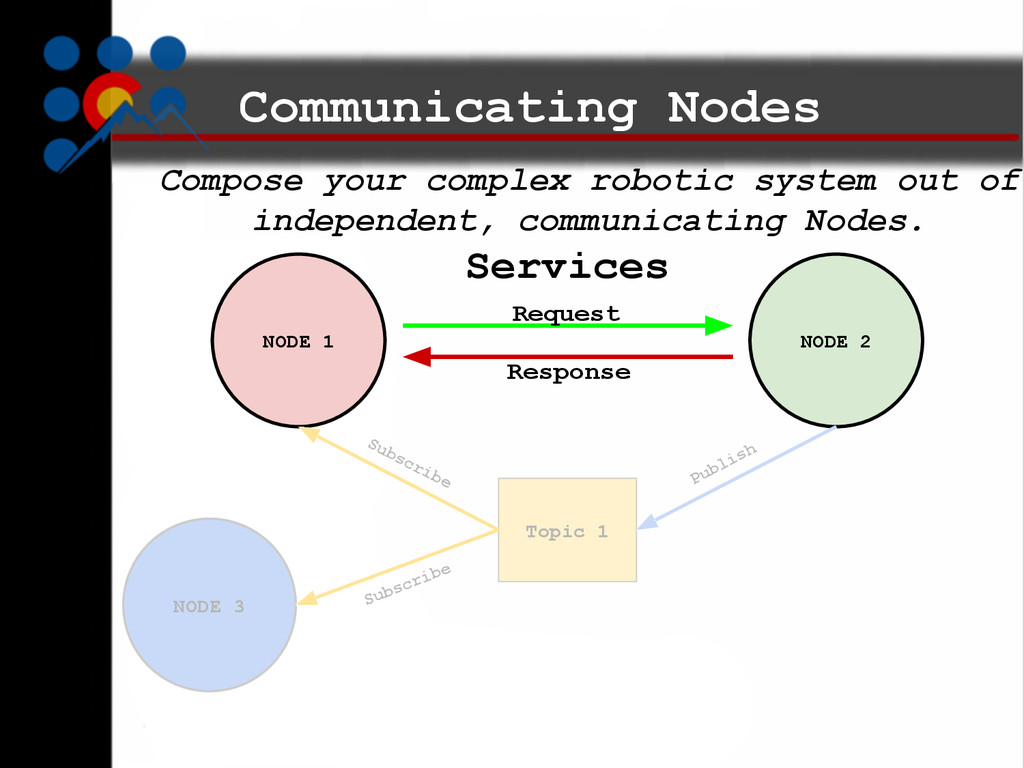
Communicating Nodes NODE 1 NODE 2 Request Response Topic 1
Subscribe Publish NODE 3 Subscribe Services Compose your complex robotic system out of independent, communicating Nodes.
Communicating Nodes NODE 1 NODE 2 Request Response Topic 1
Subscribe Publish NODE 3 Subscribe Publish & Subscribe Compose your complex robotic system out of independent, communicating Nodes.
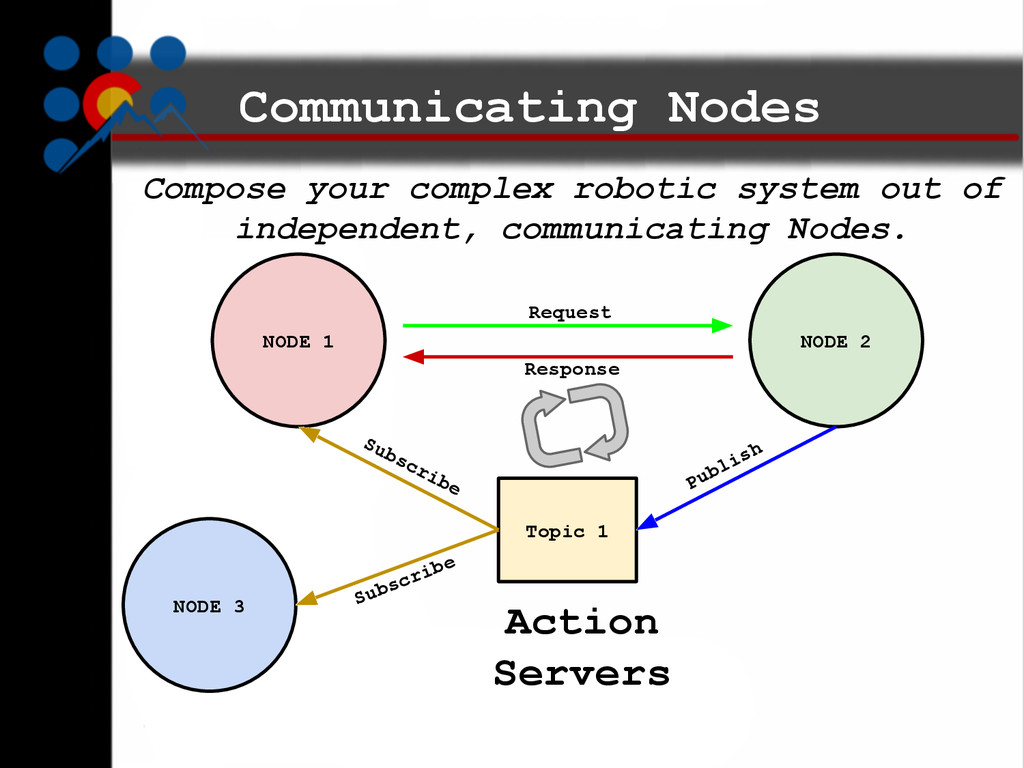
Communicating Nodes NODE 1 NODE 2 Request Response Topic 1
Subscribe Publish NODE 3 Subscribe Action Servers Compose your complex robotic system out of independent, communicating Nodes.
Why do we love ROS? • Encourages code reuse •
Promotes the use of standards • Free and Open Source • Community!!!
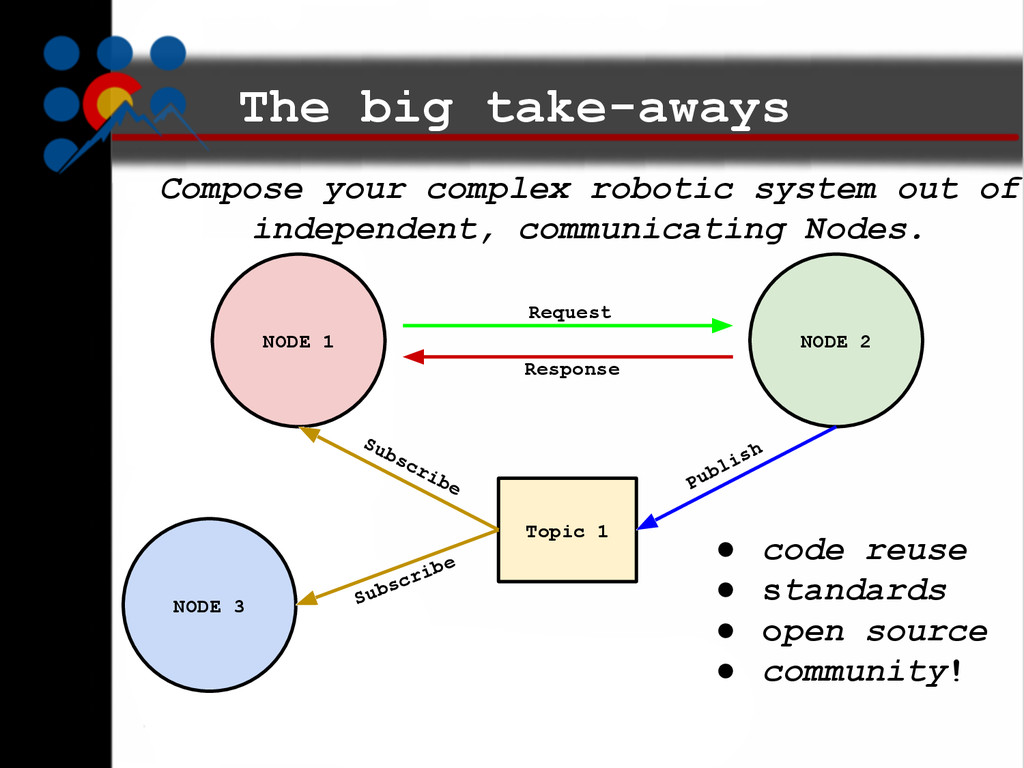
The big take-aways NODE 1 NODE 2 Request Response Topic
1 Subscribe Publish NODE 3 Subscribe • code reuse • standards • open source • community! Compose your complex robotic system out of independent, communicating Nodes.
The big take-aways http://ros.org
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}