本資料はSatAI.challengeのサーベイメンバーと共に作成したものです。
SatAI.challengeは、リモートセンシング技術にAIを適用した論文の調査や、より俯瞰した技術トレンドの調査や国際学会のメタサーベイを行う研究グループです。speakerdeckではSatAI.challenge内での勉強会で使用した資料をWeb上で共有しています。
https://x.com/sataichallenge
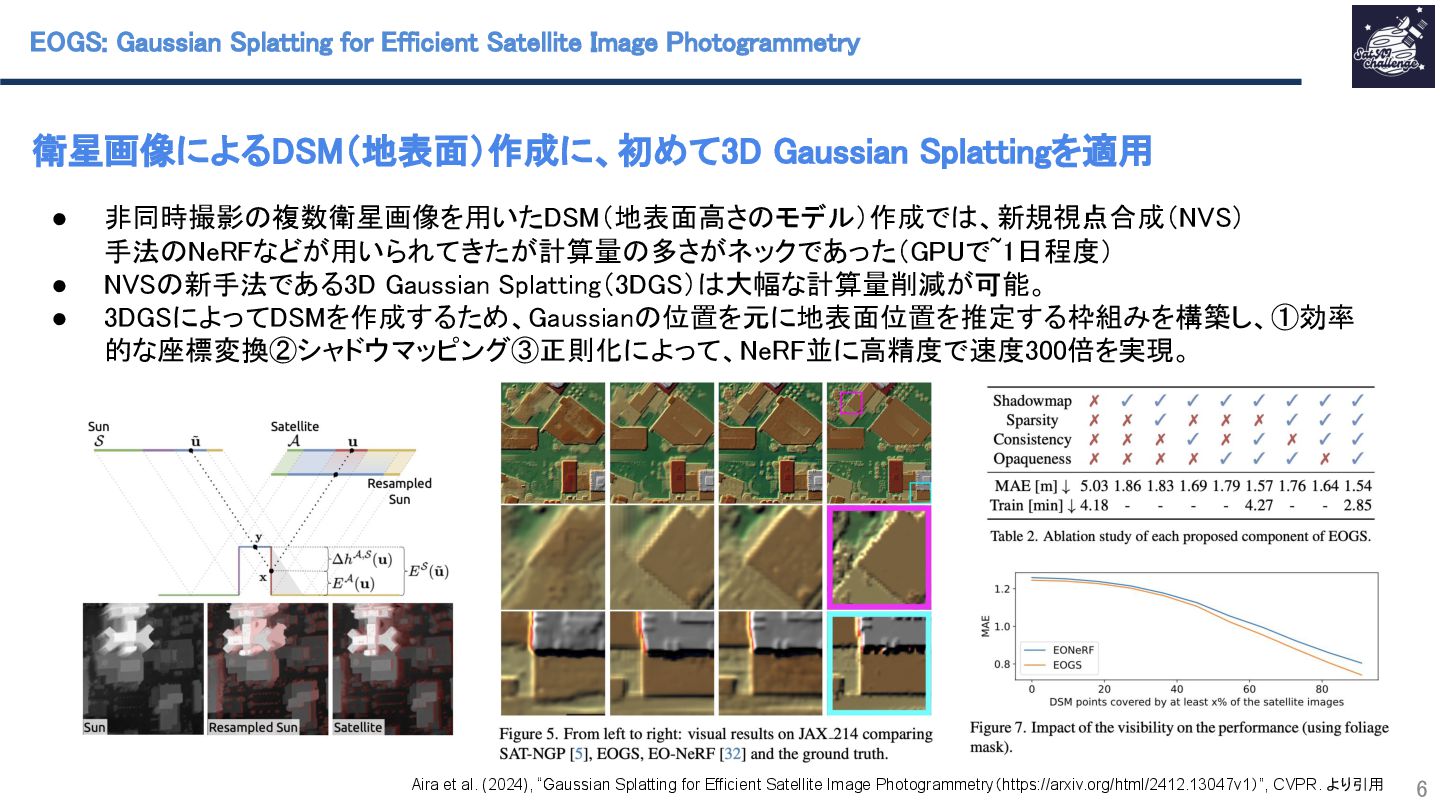
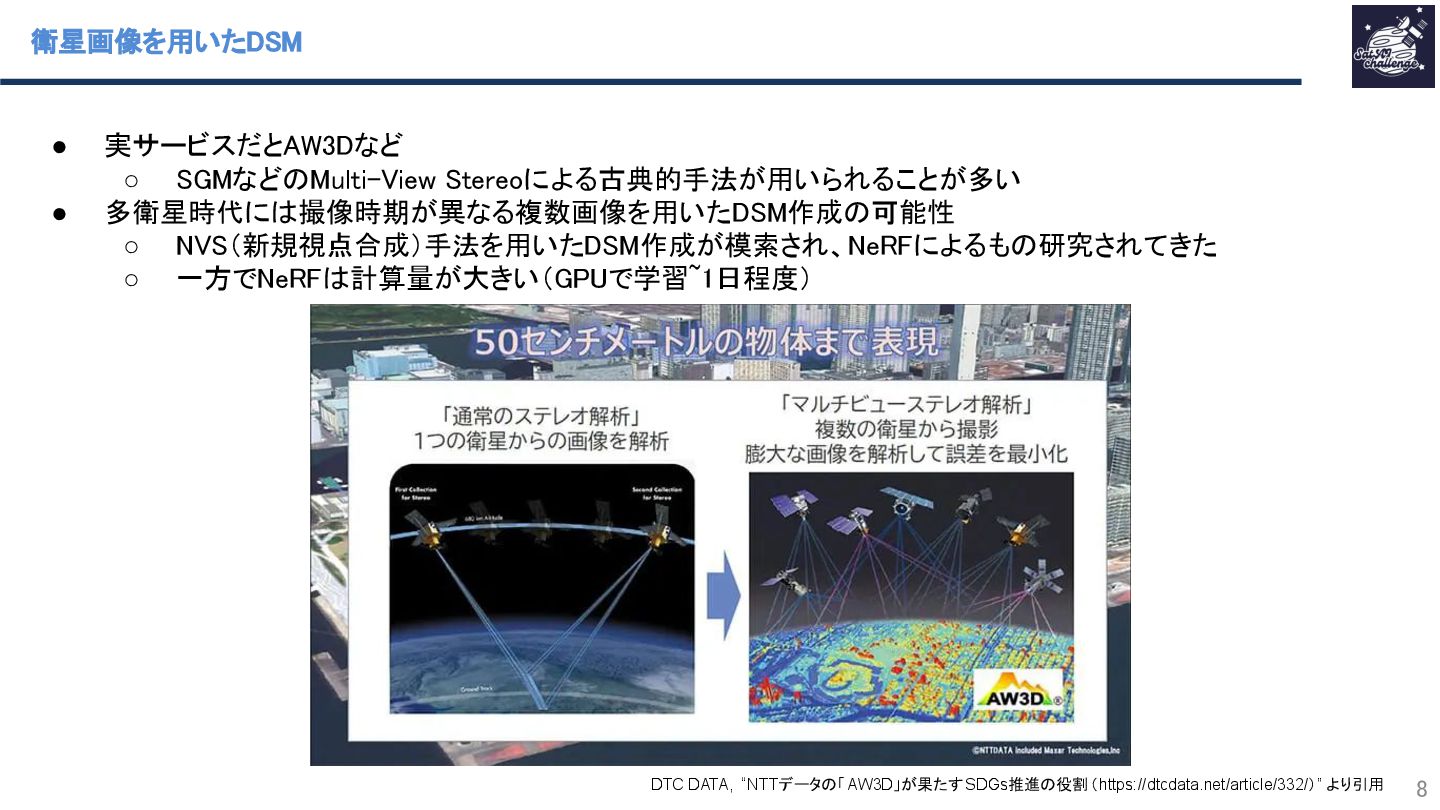
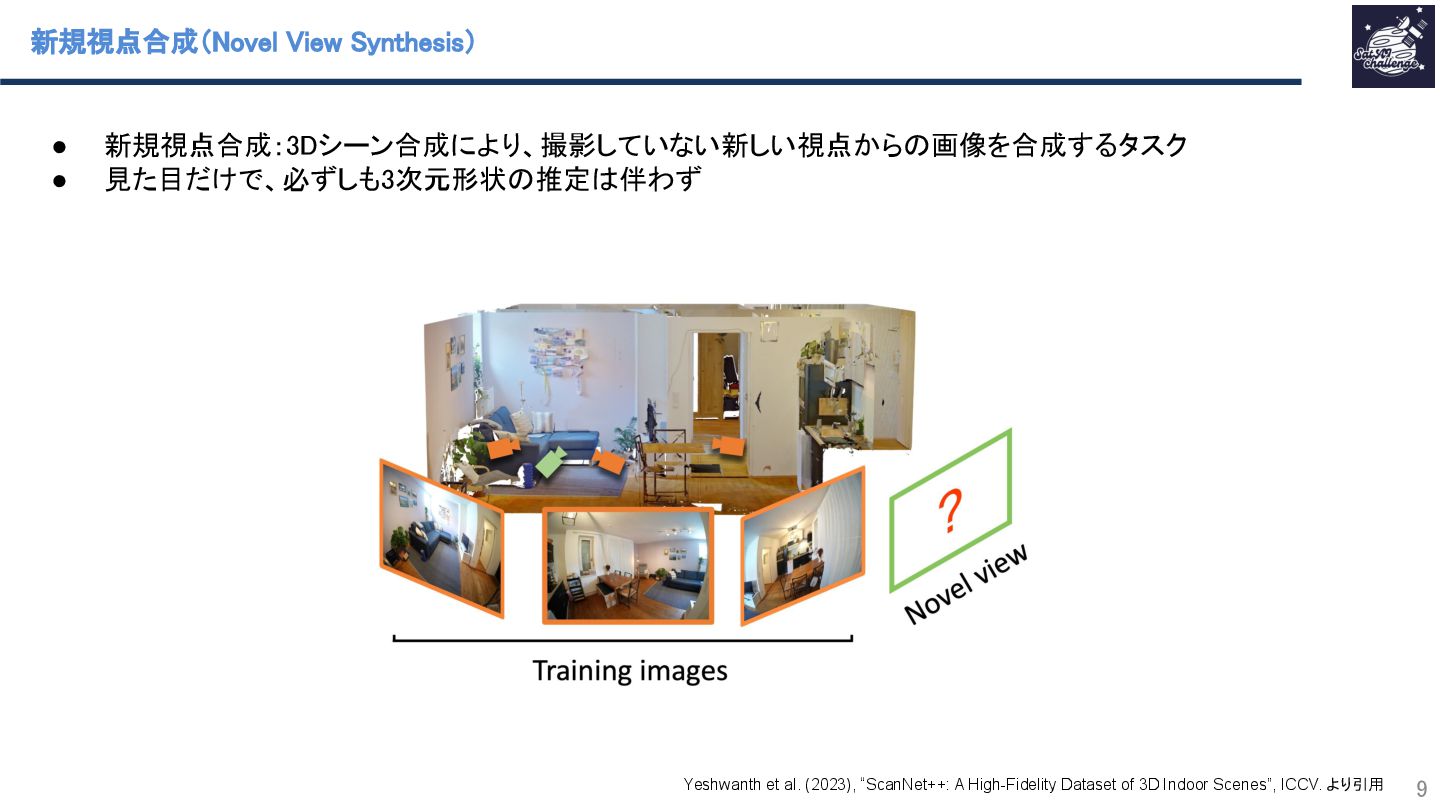
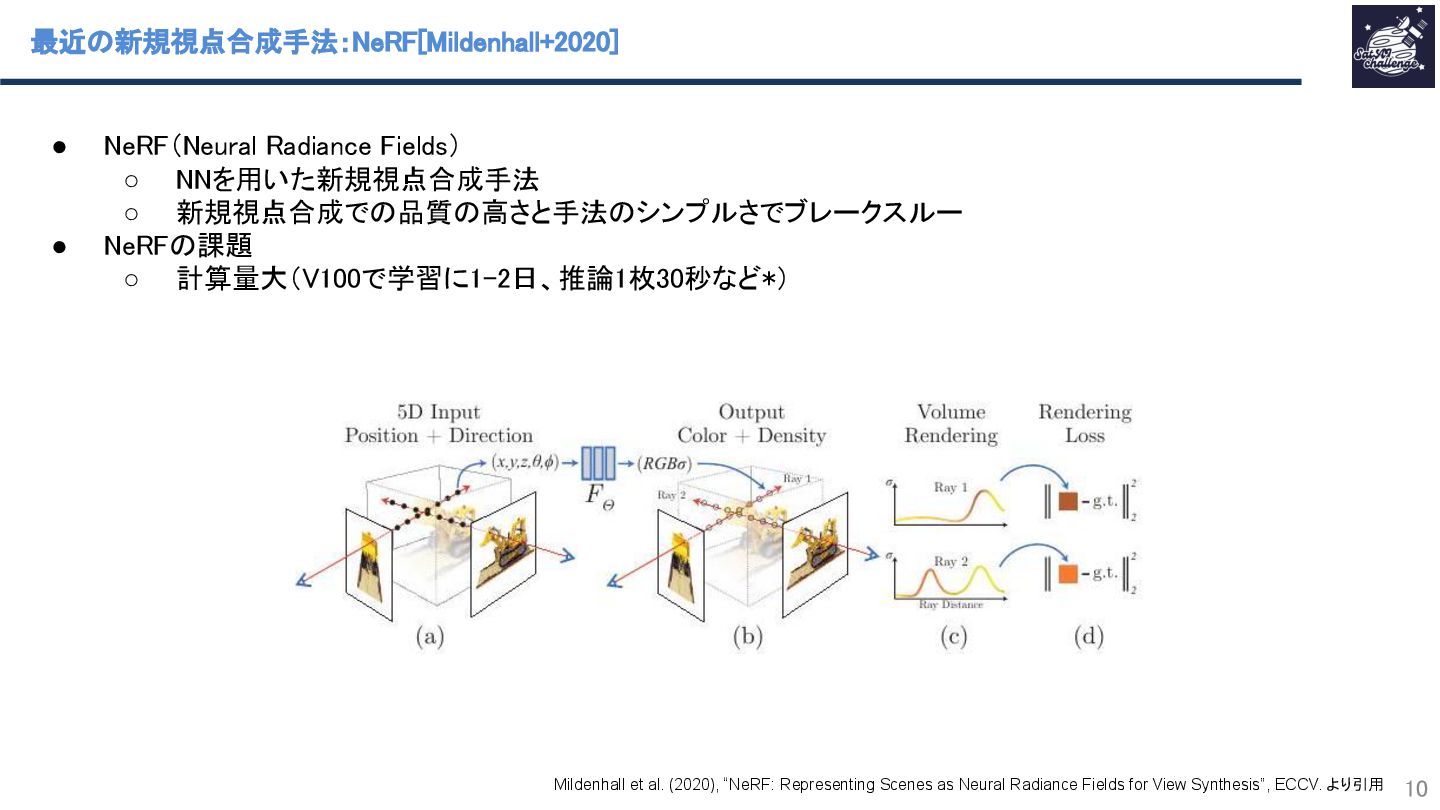
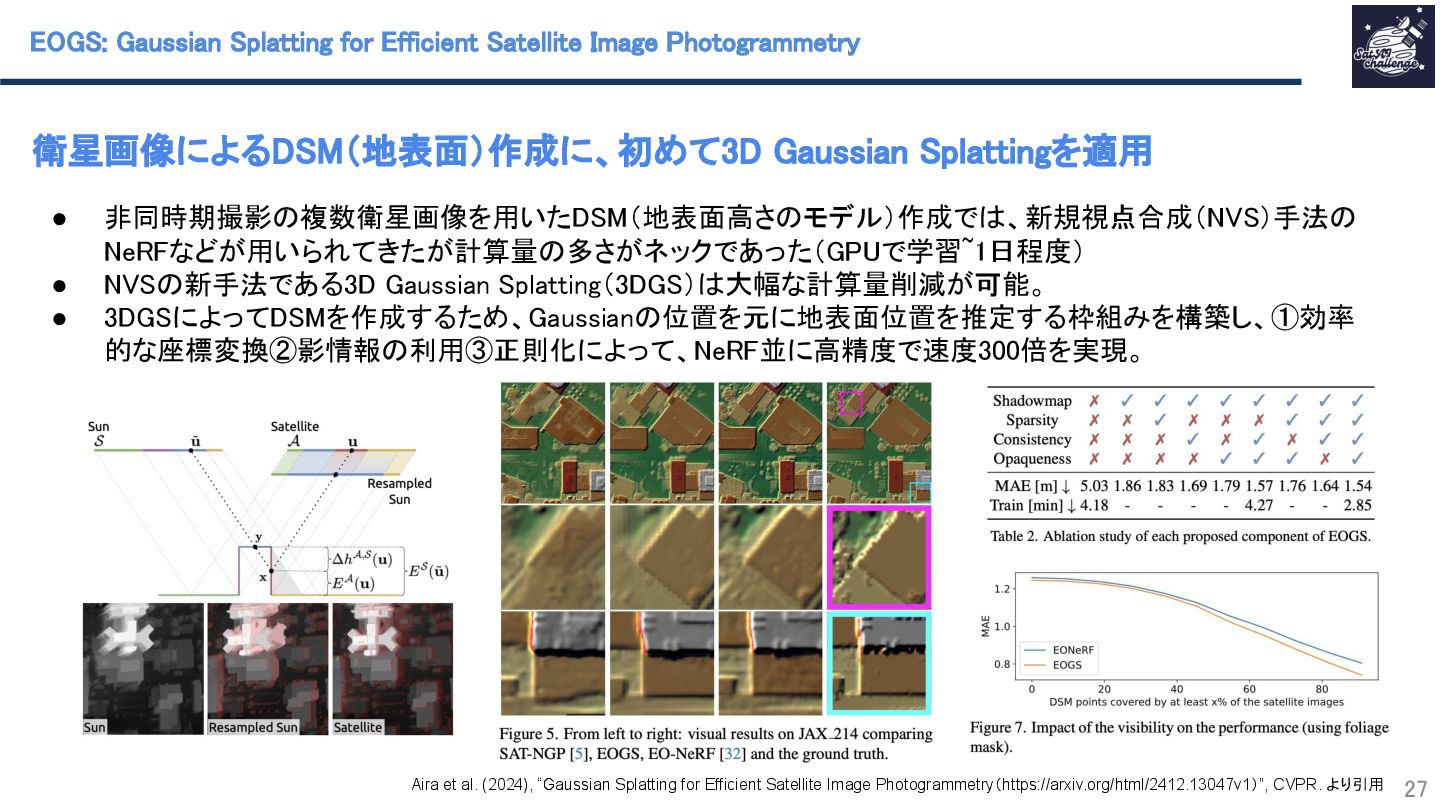
紹介する論文は、「EOGS: Gaussian Splatting for Efficient Satellite Image Photogrammetry」です。この研究では、衛星画像によるDSM(地表面高さのモデル)作成に、初めて3D Gaussian Splatting(3DGS)を適用しています。非同時撮影の複数衛星画像を用いたDSM作成では、新規視点合成(NVS)手法のNeRFなどが用いられてきましたが、計算量の多さがネックになっていました。
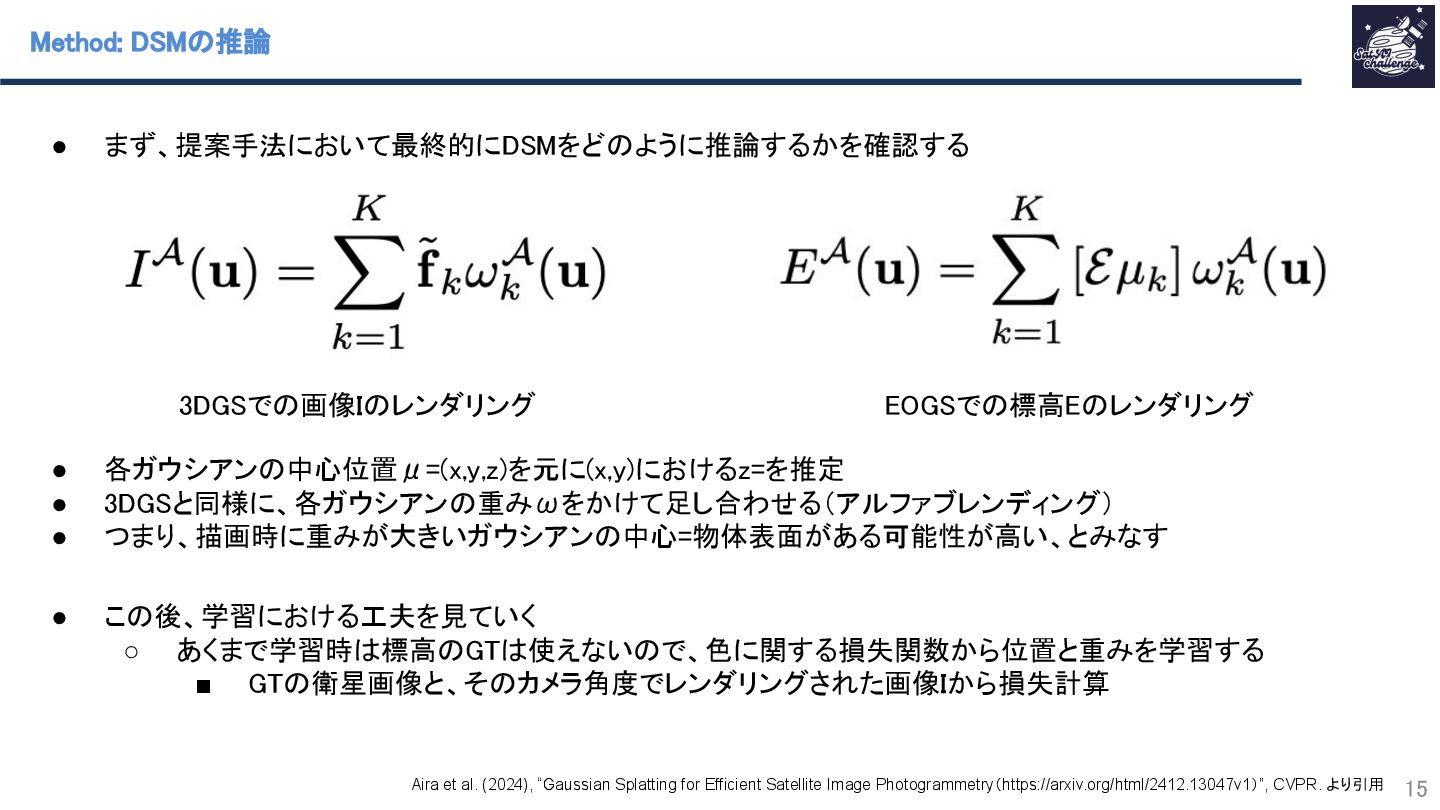
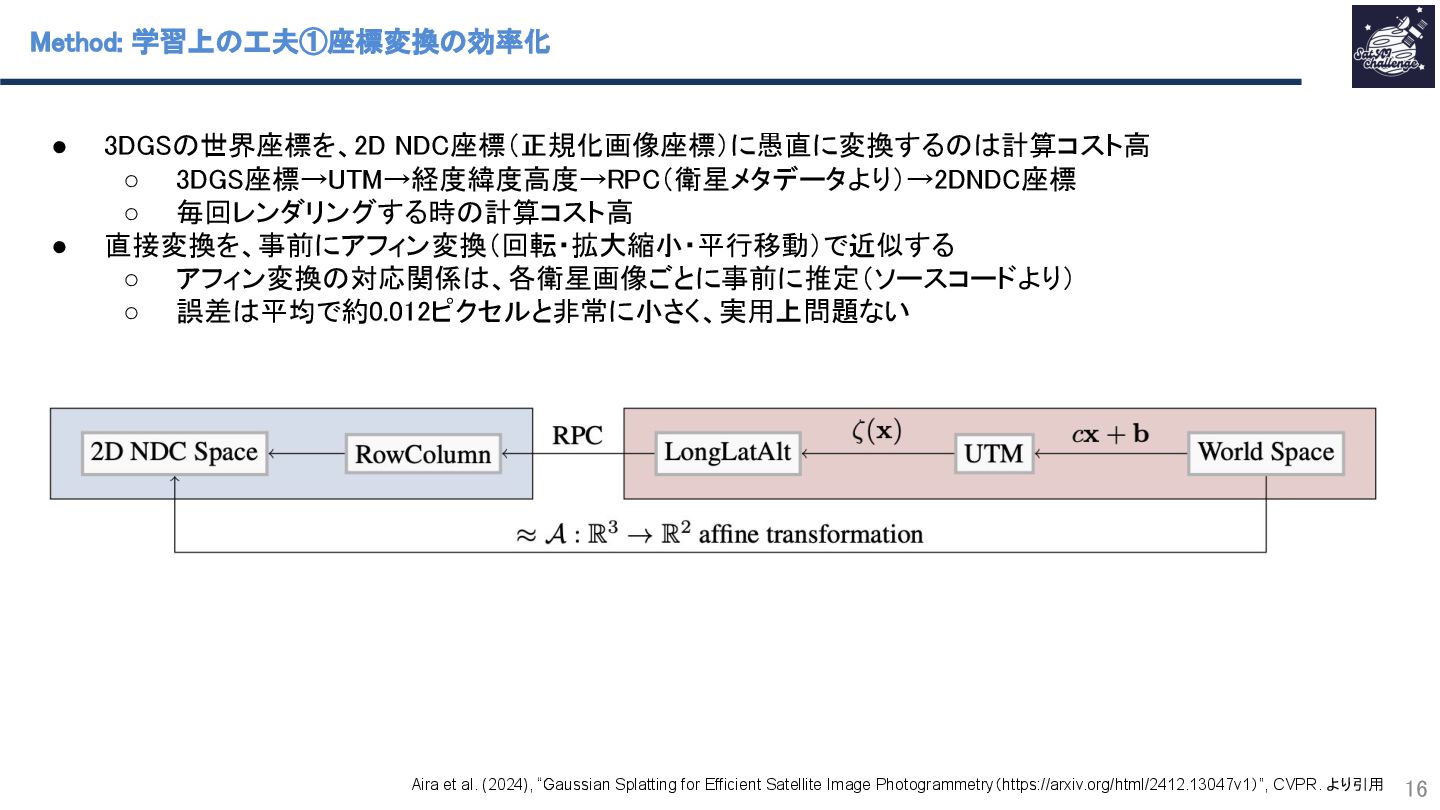
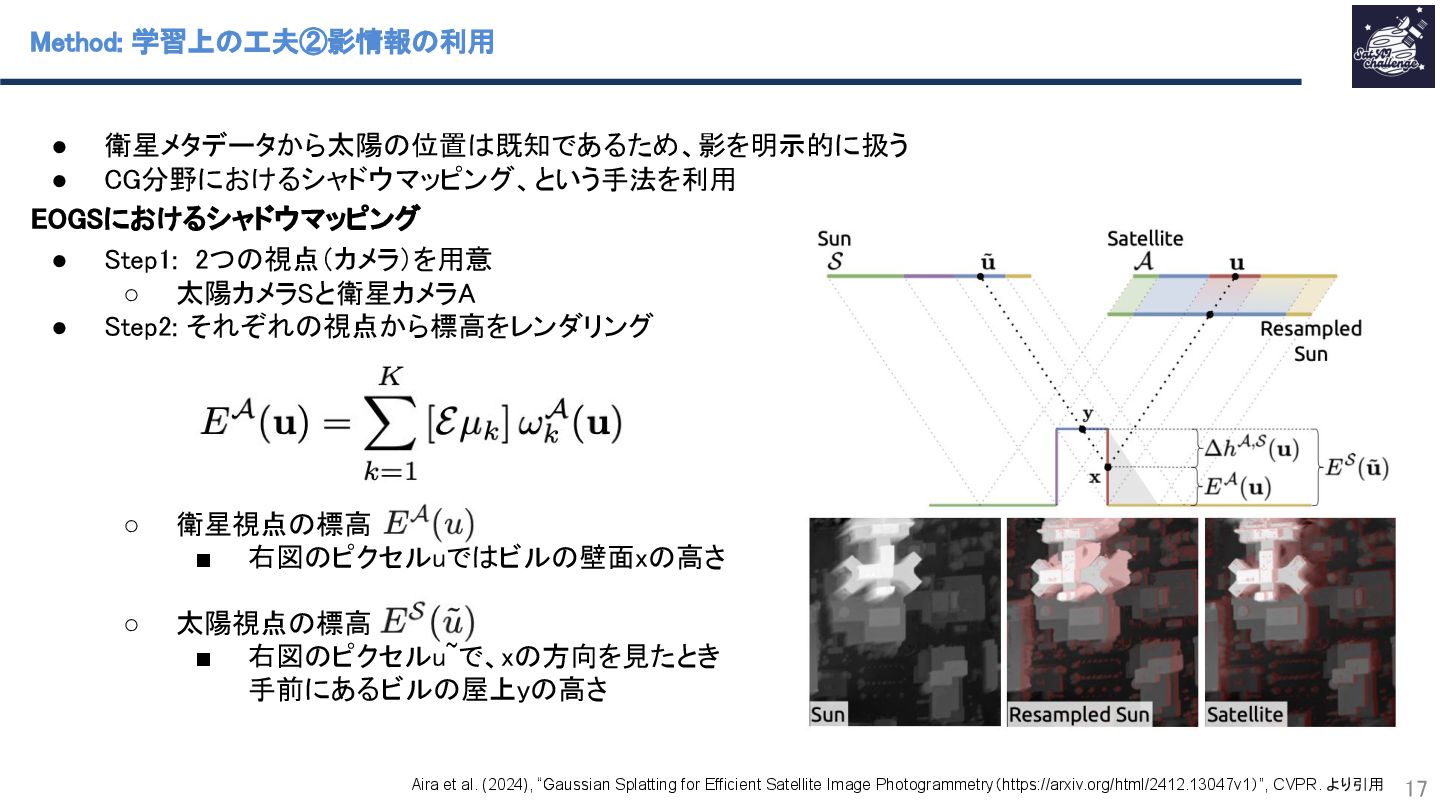
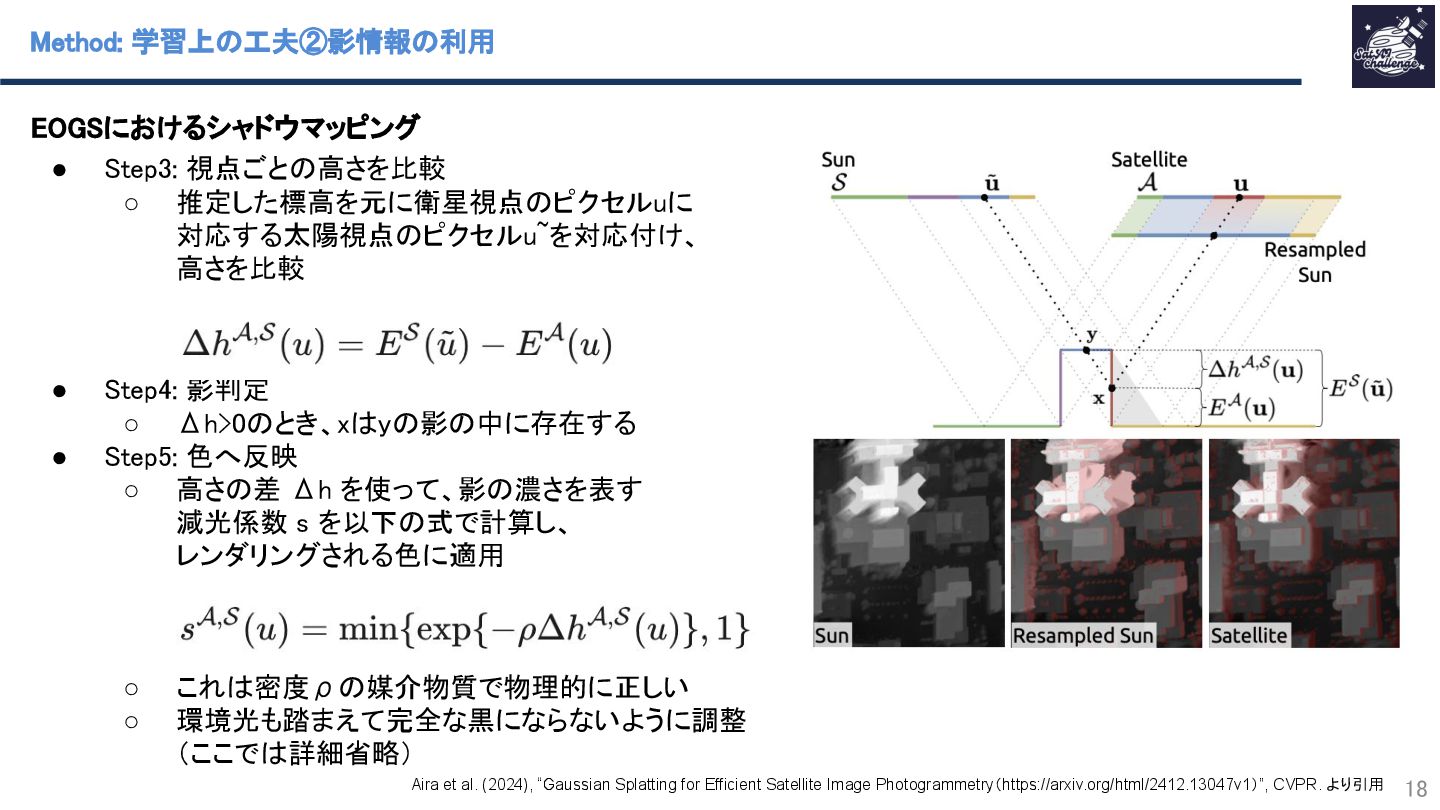
NVSの新手法である3DGSを用いることで、大幅な計算量削減が可能であり、3DGSによってDSMを作成するため、Gaussianの位置を元に地表面位置を推定する枠組みを構築し、①効率的な座標変換②シャドウマッピング③正則化によって、NeRF並に高精度でありながら、学習時間は300分の1に抑えたDSM作成を実現しました。
![EOGS: Gaussian Splatting for Efficient Satellite Image Photogrammetry [CVPR2025] 河内](https://files.speakerdeck.com/presentations/1d70bc7cd48d4f1298ad4dcf9cee05b0/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
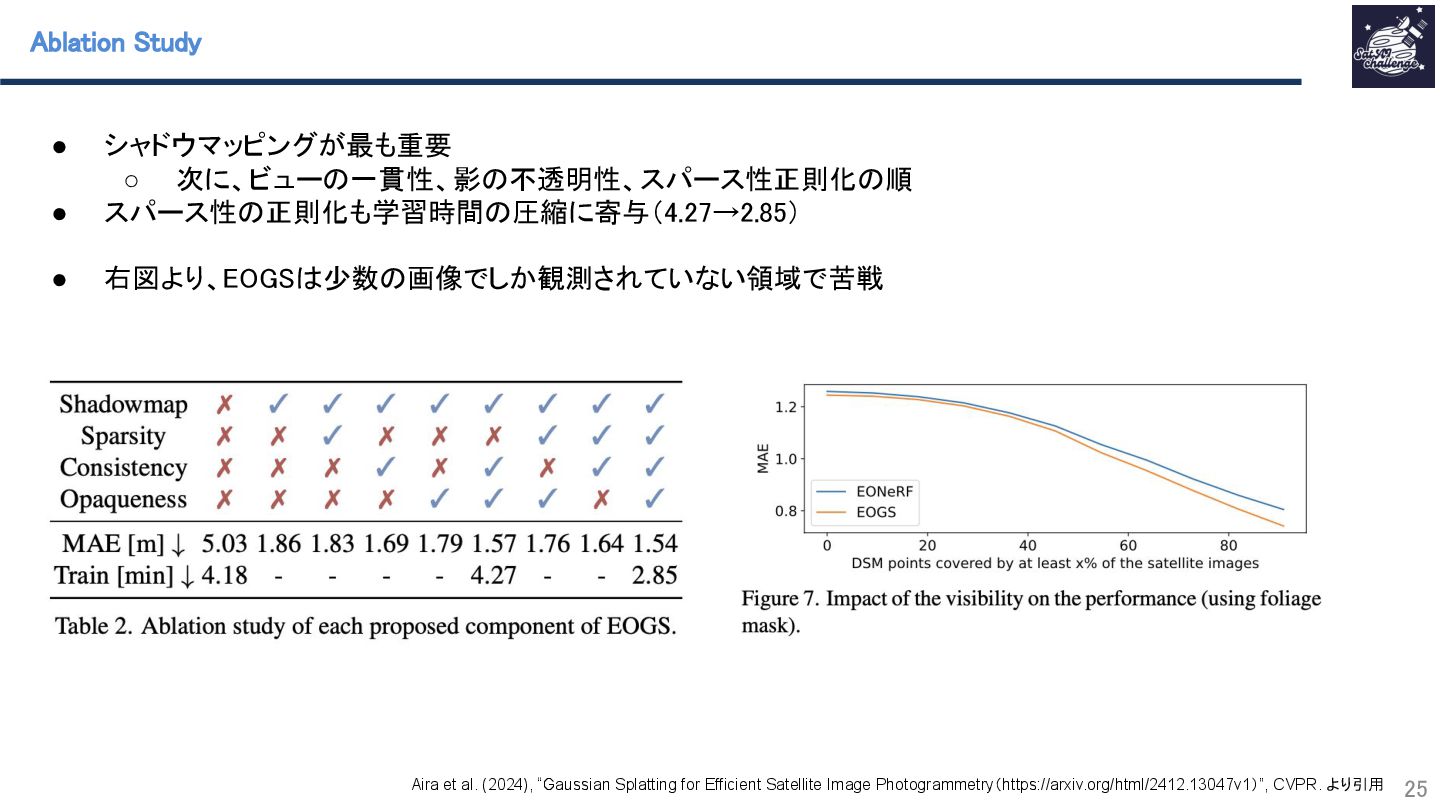
![• 3種類の正則化項を追加 • [1]スパース性の促進 ◦ 目的:今回は機微な色味よりジオメトリに関心。透明に近いガウシアンを削減し、学習を高速化 ◦](https://files.speakerdeck.com/presentations/1d70bc7cd48d4f1298ad4dcf9cee05b0/slide_18.jpg){kind=link}
![• 3種類の正則化項を追加 • [3]不透明性の促進 ◦ 目的:建物などが、不自然な半透明な影を落とすことを防ぐ ▪ 実際には暗い色がついているところを、影によって表現してしまうのを防ぎたい](https://files.speakerdeck.com/presentations/1d70bc7cd48d4f1298ad4dcf9cee05b0/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}