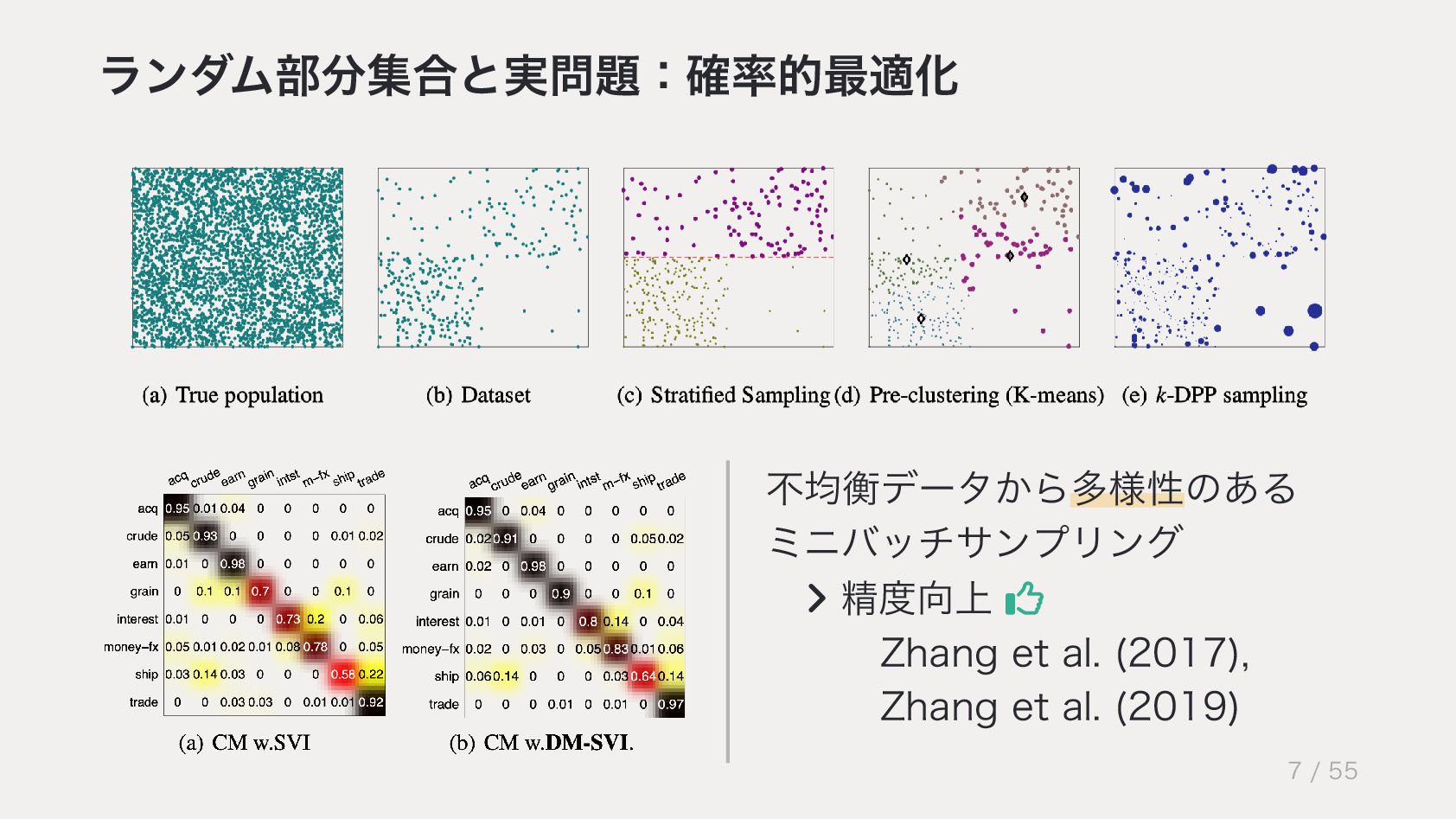
Submodular Diversity Models Via Noise Contrastive Estimation., in Proceedings of the 19th International Conference on Artificial Intelligence and Statistics, (PMLR), 770–779. Vere-Jones, D. (1997). Alpha-Permanents and Their Applications to Multivariate Gamma, Negative Binomial and Ordinary Binomial Distributions. New Zealand J. Math 26, 125–149. Zhang, C., Kjellström, H., and Mandt, S. (2017). Balanced Mini-batch Sampling for SGD Using Determinantal Point Processes., in Proceedings of the Thirty-Third Conference on Uncertainty in Artificial Intelligence, UAI 2017, Sydney, Australia, August 11-15, 2017, (AUAI Press). Zhang, C., Öztireli, C., Mandt, S., and Salvi, G. (2019). Active Mini-Batch Sampling Using Repulsive Point Processes., in Proceedings of the Thirty-Third AAAI
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
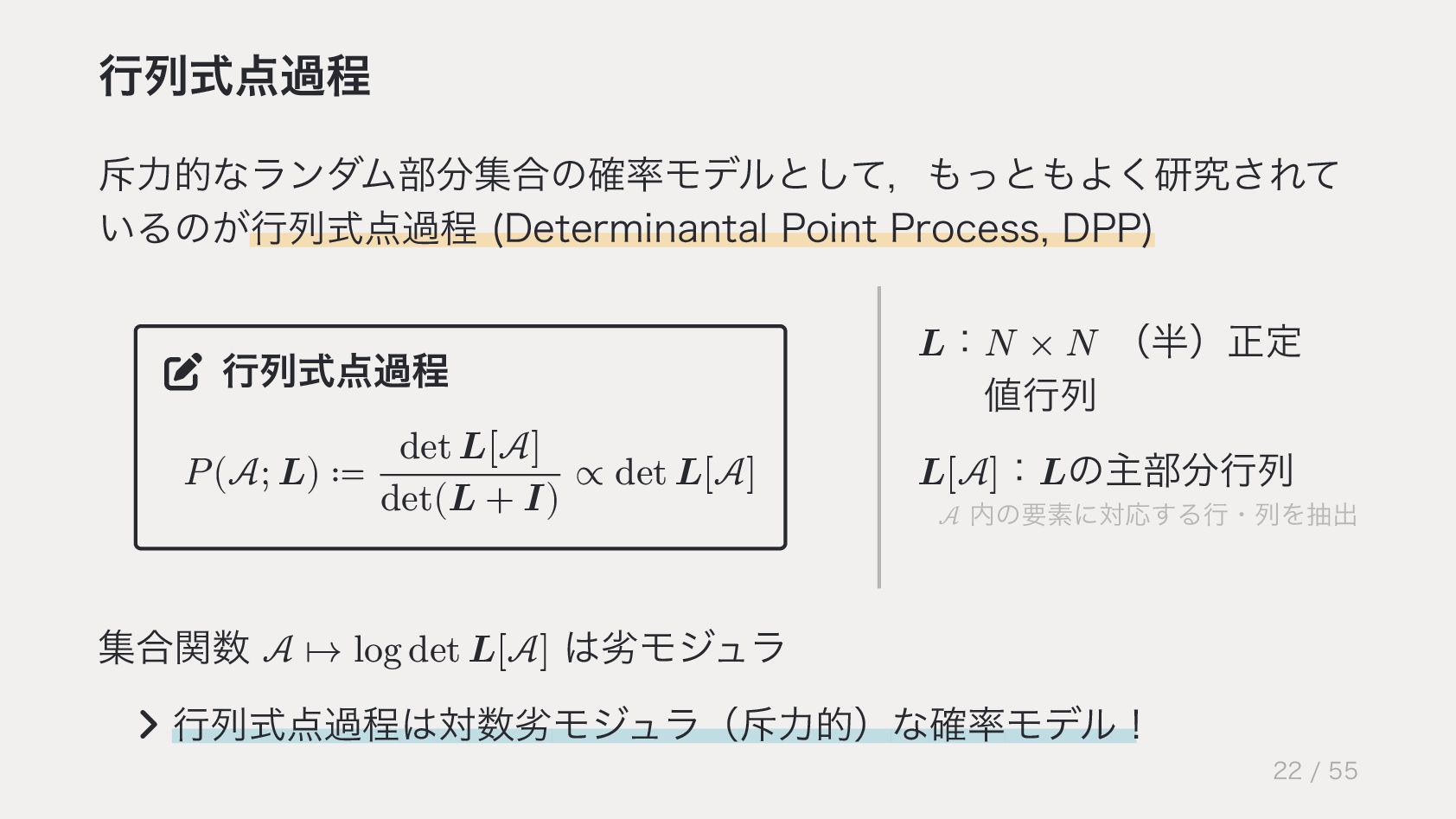
![対数劣モジュラモデルのモード探索 行列式点過程 𝑃(𝒜; 𝑳) ∝ det 𝑳[𝒜] は対数劣モジュラ モード探索問題](https://files.speakerdeck.com/presentations/35cd5ebbd241420e8205770390cb229a/slide_22.jpg){kind=link}
![行列式点過程のモード探索 log 𝑃(𝒜; 𝑳) = log det(𝑳[𝒜]) + const. は一般に単調な劣モ関数でない](https://files.speakerdeck.com/presentations/35cd5ebbd241420e8205770390cb229a/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![log det 𝑳[𝓐] の一般化 一般に正定値行列 𝑿 に対して log det 𝑿](https://files.speakerdeck.com/presentations/35cd5ebbd241420e8205770390cb229a/slide_36.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![DKPP の引力・斥力 集合関数 𝒜 ↦ tr 𝜑(𝑳[𝒜]) が優モ/劣モになるための関数 𝜑 の形は?](https://files.speakerdeck.com/presentations/35cd5ebbd241420e8205770390cb229a/slide_40.jpg){kind=link}
![DKPP の引力・斥力 集合関数 𝒜 ↦ tr 𝜑(𝑳[𝒜]) が優モ/劣モになるための関数 𝜑 の形は?](https://files.speakerdeck.com/presentations/35cd5ebbd241420e8205770390cb229a/slide_41.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}