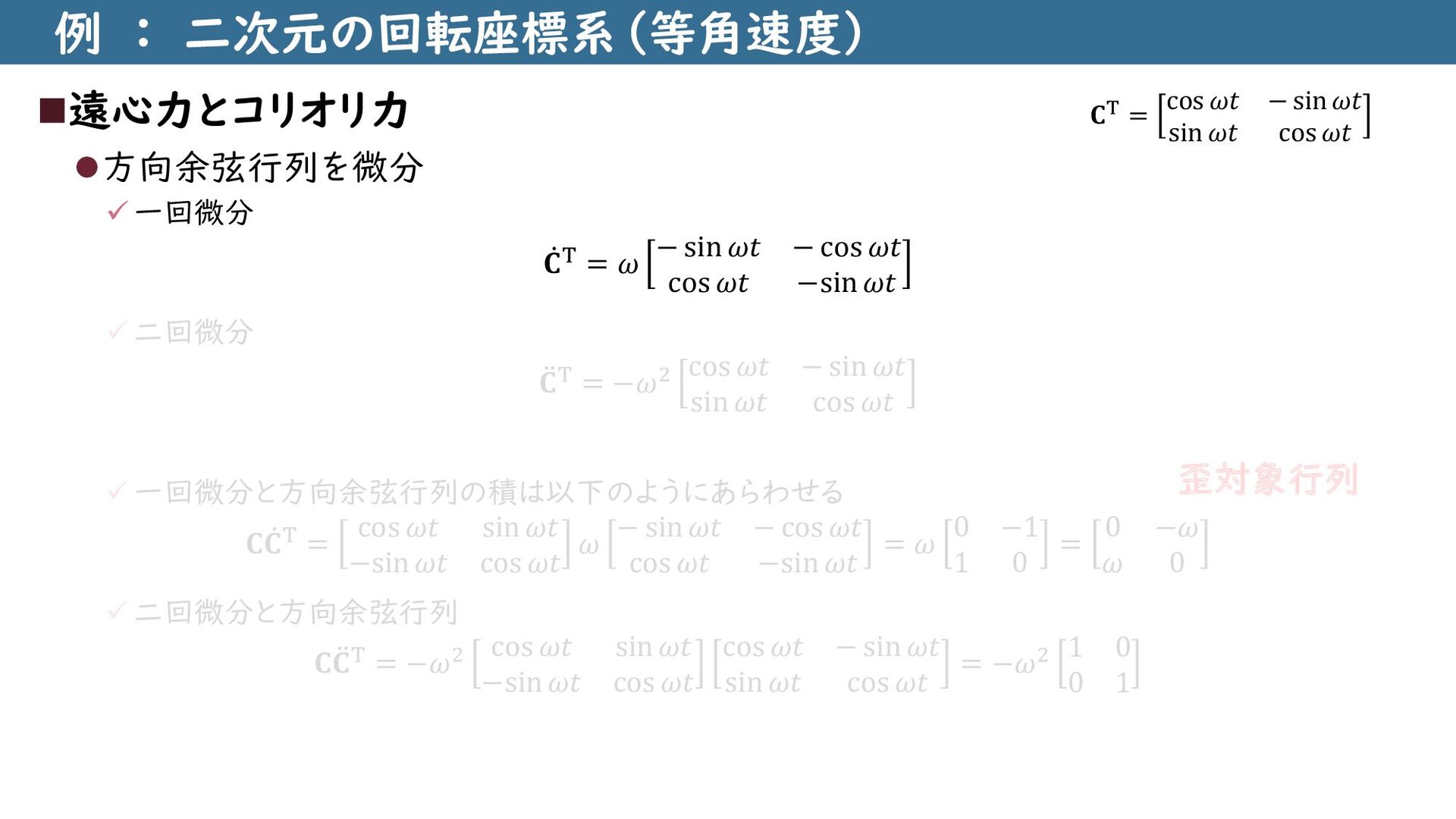
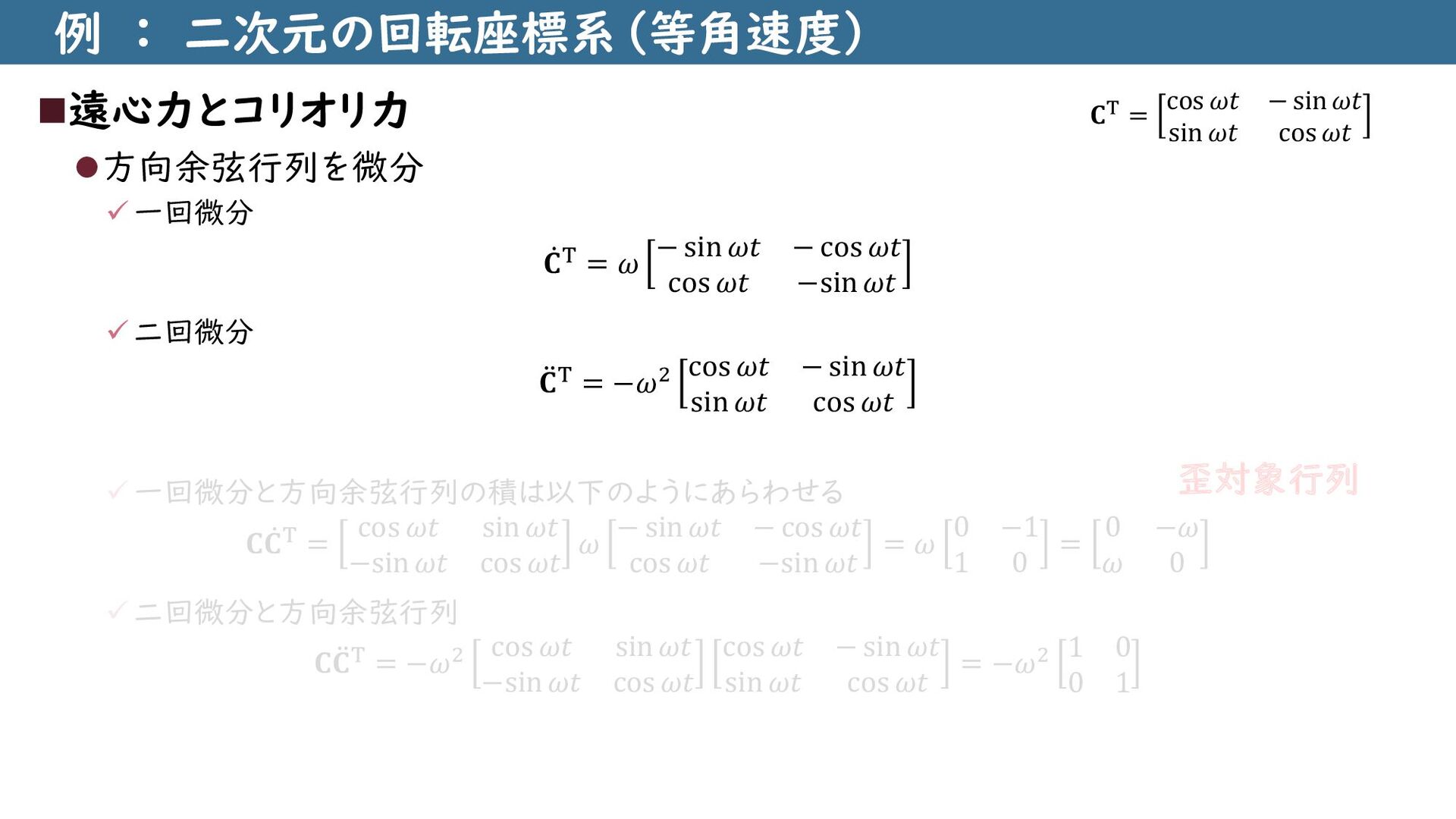
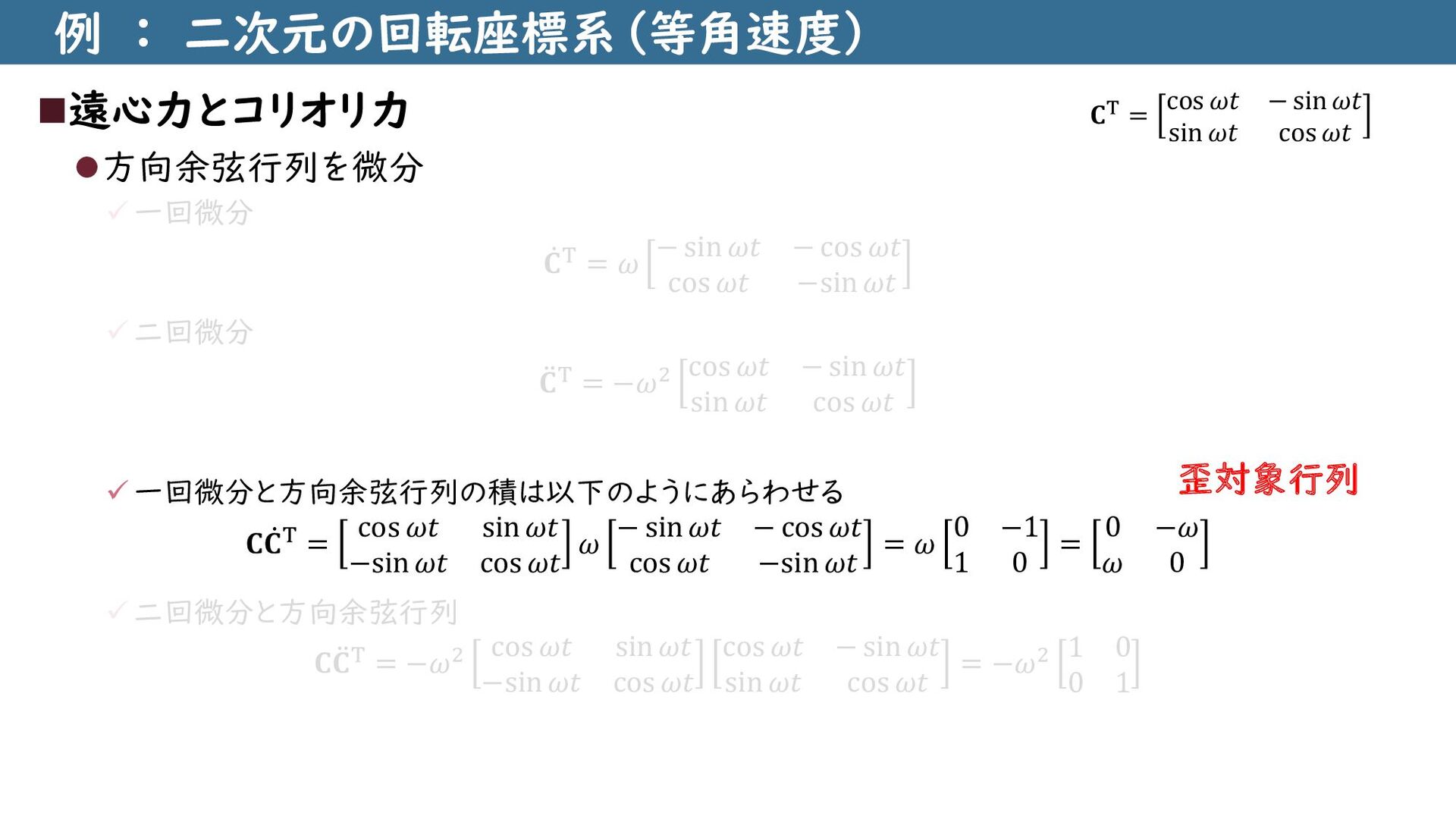
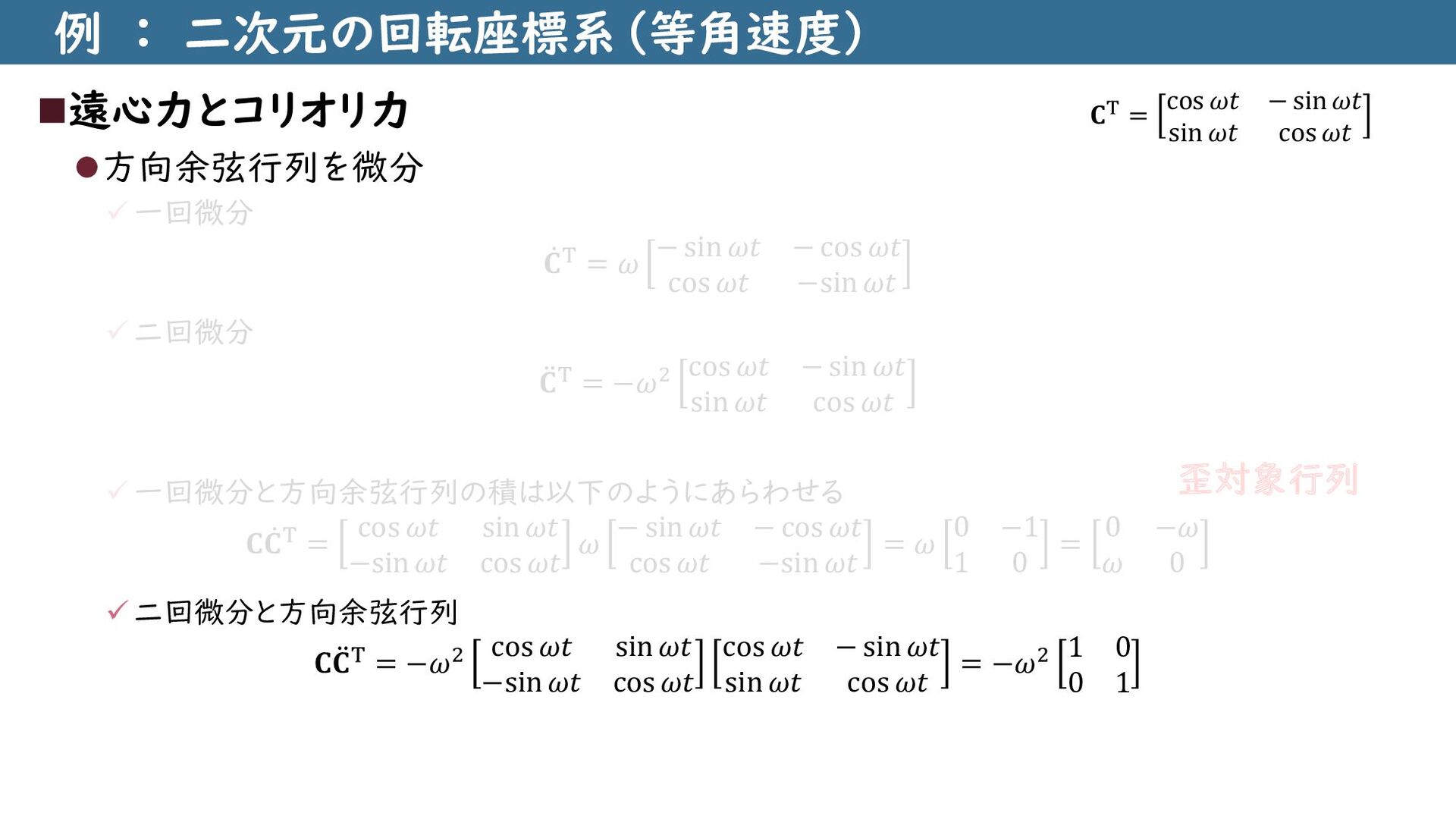
− sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 ✓二回微分 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 ✓一回微分と方向余弦行列の積は以下のようにあらわせる 𝐂 ሶ 𝐂T = cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 𝜔 − sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 = 𝜔 0 −1 1 0 = 0 −𝜔 𝜔 0 ✓二回微分と方向余弦行列 𝐂 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 = −𝜔2 1 0 0 1 𝐂T = cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 歪対象行列
− sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 ✓二回微分 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 ✓一回微分と方向余弦行列の積は以下のようにあらわせる 𝐂 ሶ 𝐂T = cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 𝜔 − sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 = 𝜔 0 −1 1 0 = 0 −𝜔 𝜔 0 ✓二回微分と方向余弦行列 𝐂 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 = −𝜔2 1 0 0 1 𝐂T = cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 歪対象行列
− sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 ✓二回微分 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 ✓一回微分と方向余弦行列の積は以下のようにあらわせる 𝐂 ሶ 𝐂T = cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 𝜔 − sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 = 𝜔 0 −1 1 0 = 0 −𝜔 𝜔 0 ✓二回微分と方向余弦行列 𝐂 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 = −𝜔2 1 0 0 1 𝐂T = cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 歪対象行列
− sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 ✓二回微分 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 ✓一回微分と方向余弦行列の積は以下のようにあらわせる 𝐂 ሶ 𝐂T = cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 𝜔 − sin 𝜔𝑡 − cos 𝜔𝑡 cos 𝜔𝑡 −sin 𝜔𝑡 = 𝜔 0 −1 1 0 = 0 −𝜔 𝜔 0 ✓二回微分と方向余弦行列 𝐂 ሷ 𝐂T = −𝜔2 cos 𝜔𝑡 sin 𝜔𝑡 −sin 𝜔𝑡 cos 𝜔𝑡 cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 = −𝜔2 1 0 0 1 𝐂T = cos 𝜔𝑡 − sin 𝜔𝑡 sin 𝜔𝑡 cos 𝜔𝑡 歪対象行列
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}