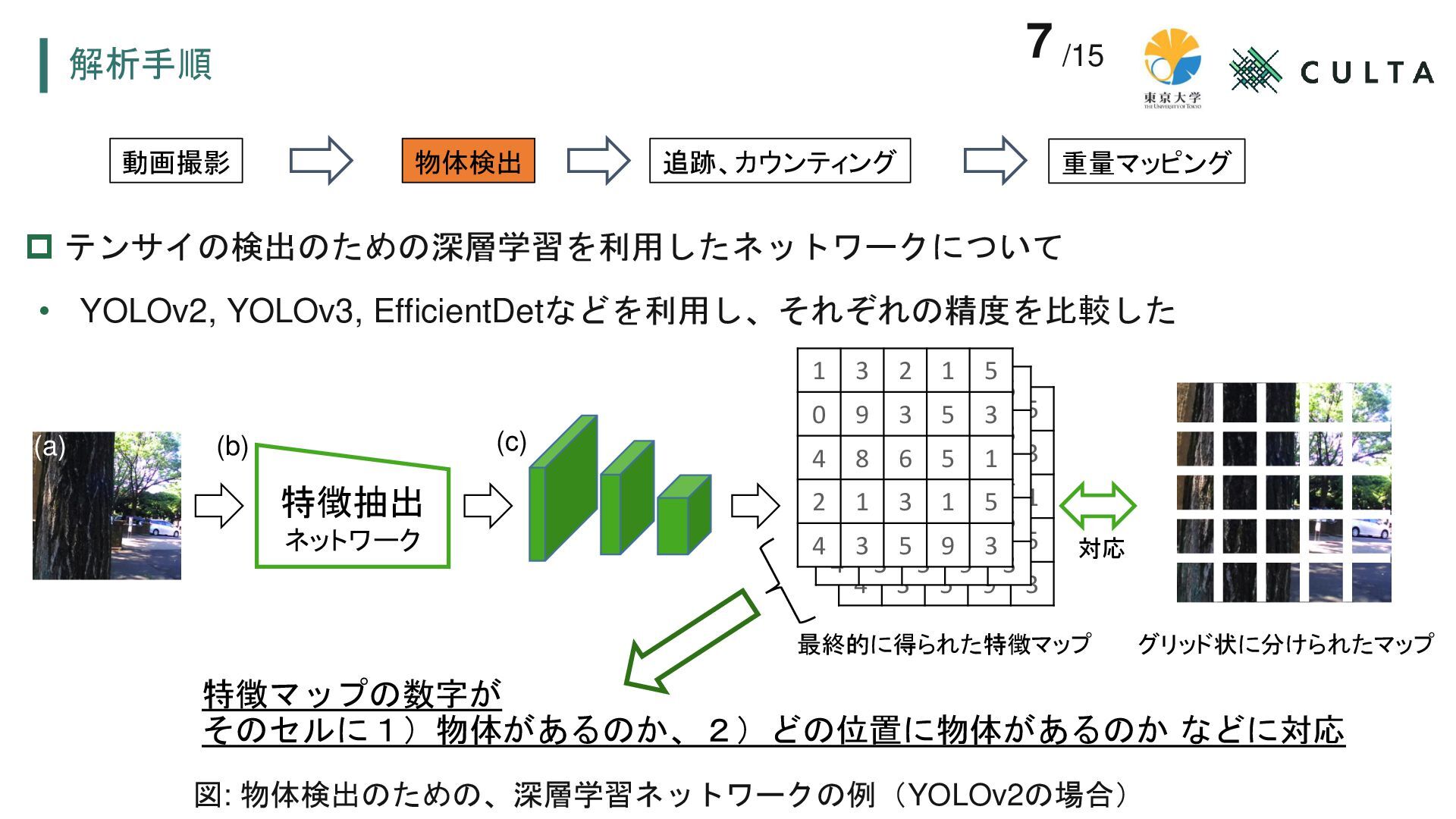
EfficientDetなどを利用し、それぞれの精度を比較した 1 3 2 1 5 0 9 3 5 3 4 8 6 5 1 2 1 3 1 5 4 3 5 9 3 1 3 2 1 5 0 9 3 5 3 4 8 6 5 1 2 1 3 1 5 4 3 5 9 3 (a) 特徴抽出 ネットワーク (b) (c) 1 3 2 1 5 0 9 3 5 3 4 8 6 5 1 2 1 3 1 5 4 3 5 9 3 最終的に得られた特徴マップ 特徴マップの数字が そのセルに1)物体があるのか、2)どの位置に物体があるのか などに対応 グリッド状に分けられたマップ 対応 図: 物体検出のための、深層学習ネットワークの例(YOLOv2の場合) 7 /15
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
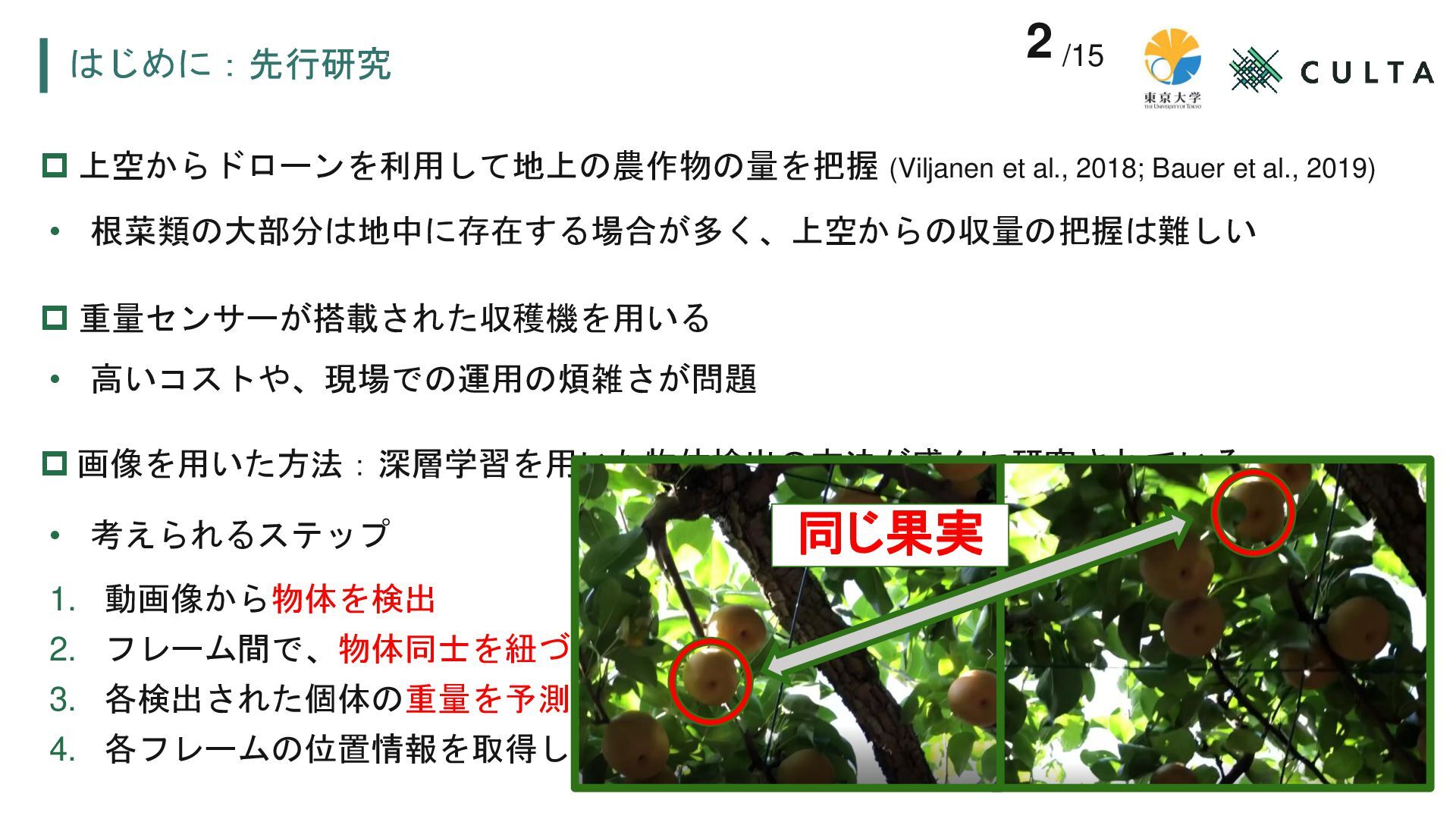
![はじめに:先行研究 果樹園で撮影した動画から、対象物体を検出する例 (Itakura et al., 2021) 図:[a]梨の検出[b]梨のカウンティング[c]リンゴのカウンティングの様子(Itakura et al、2021より引用)](https://files.speakerdeck.com/presentations/990bcd12e8a84d0ba5324ca009eb7642/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}