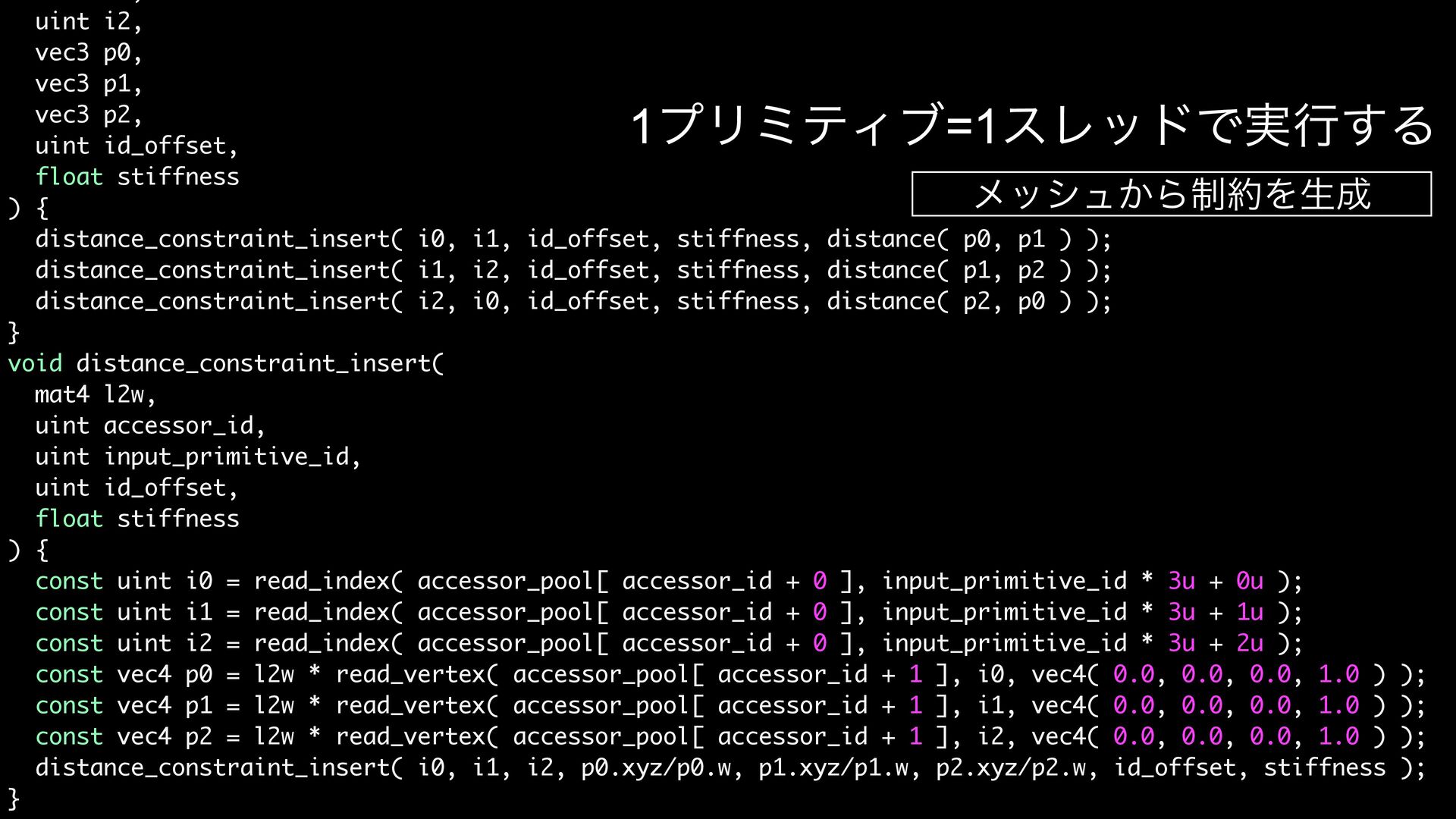
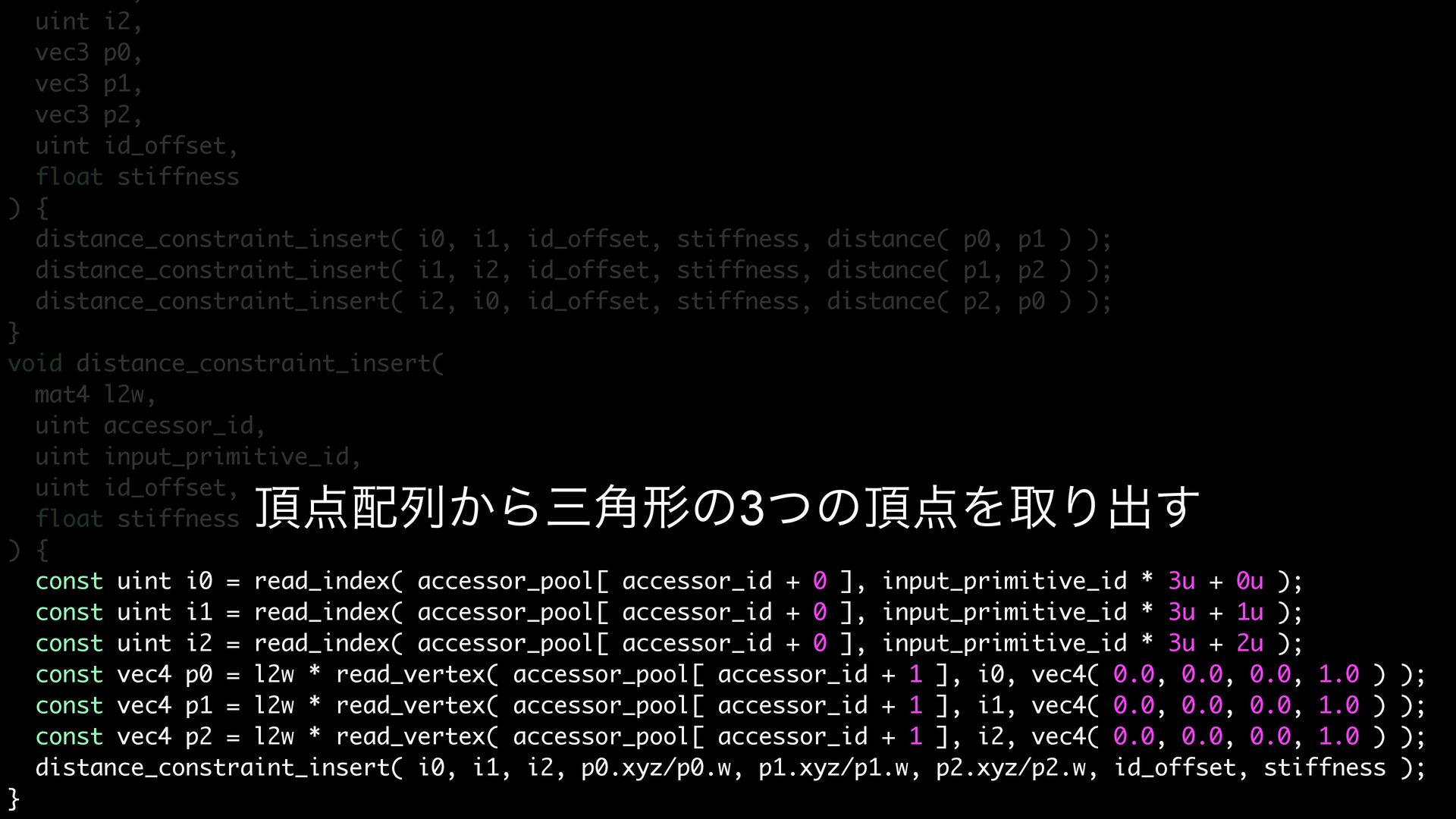
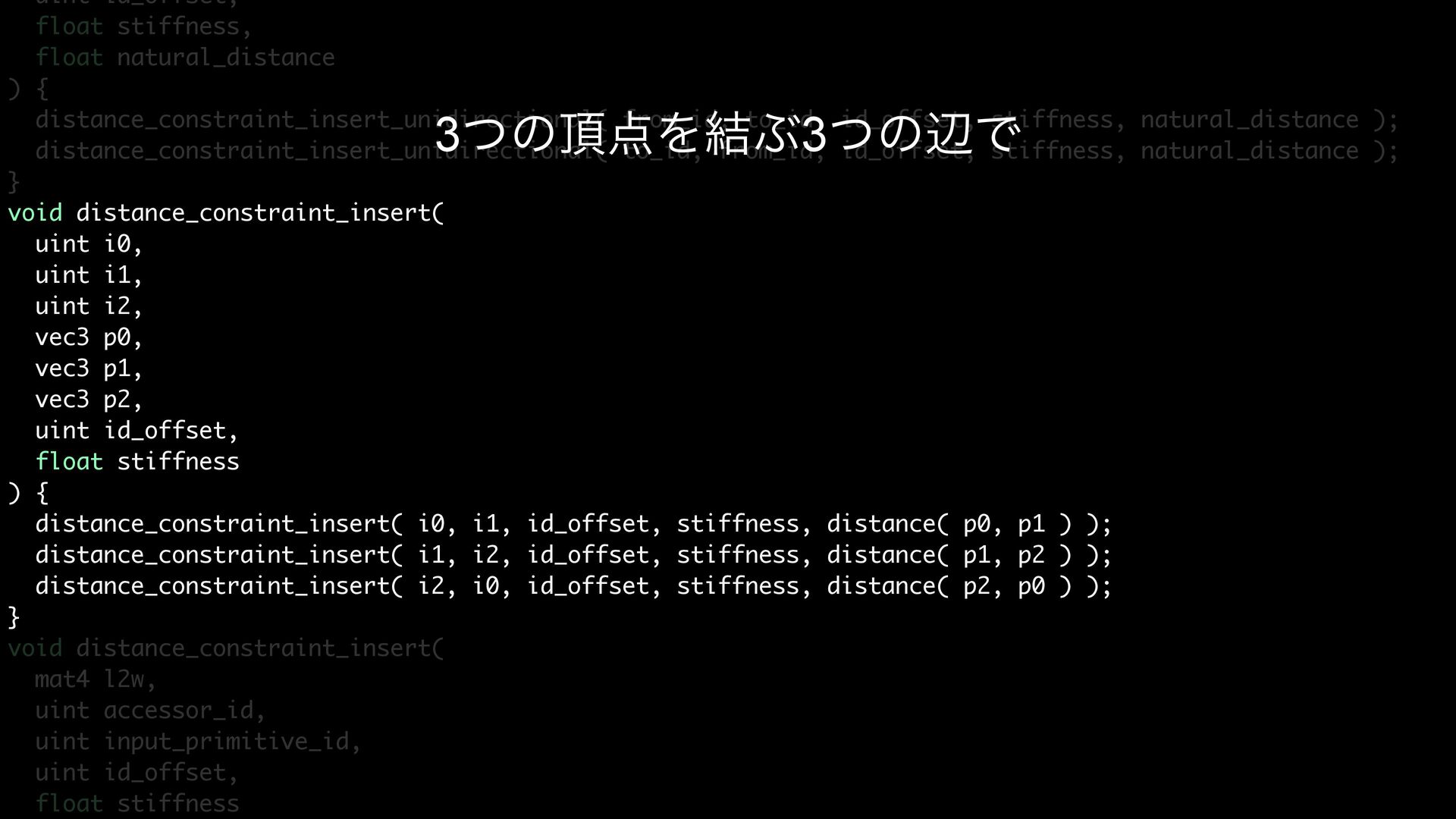
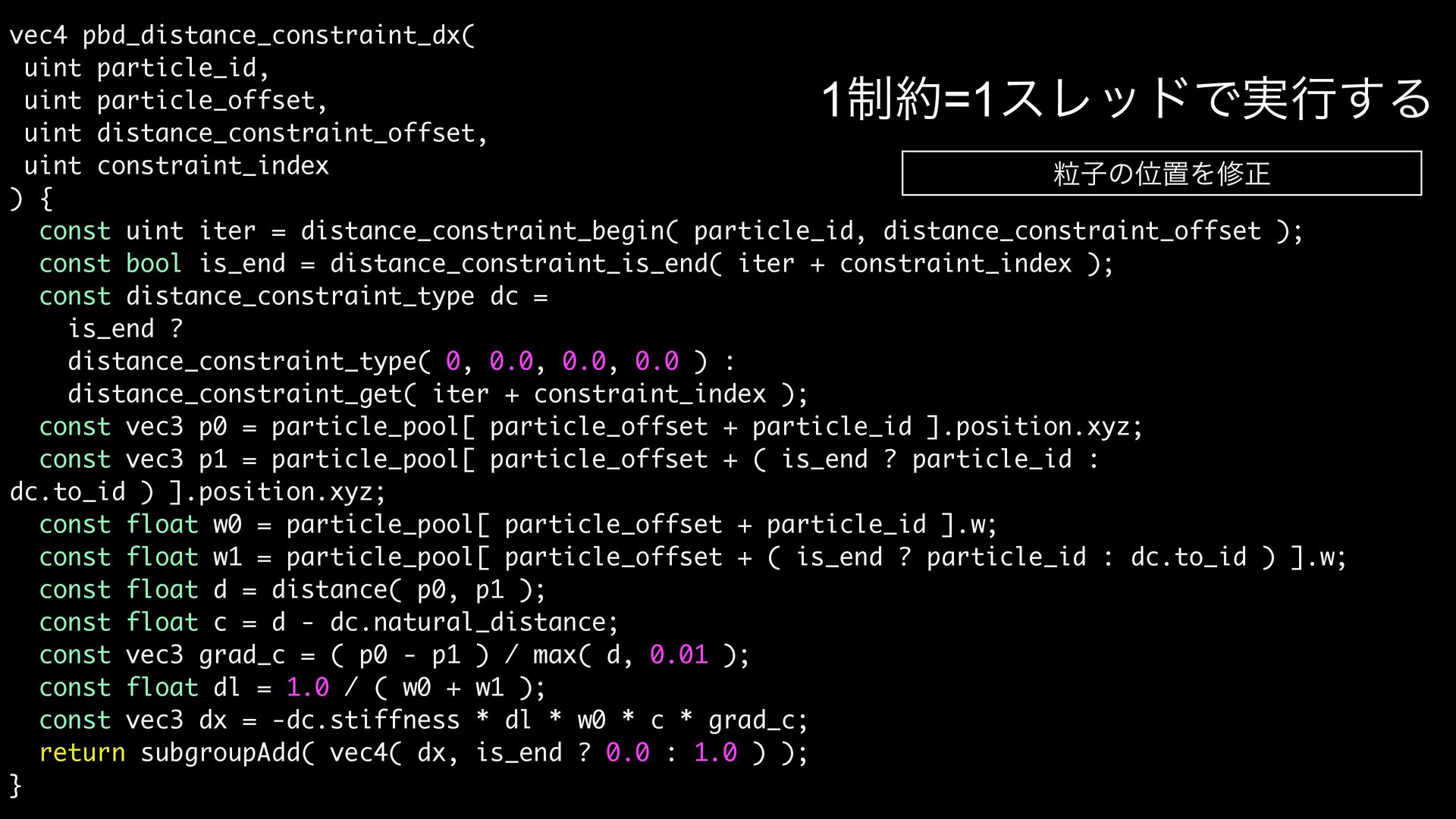
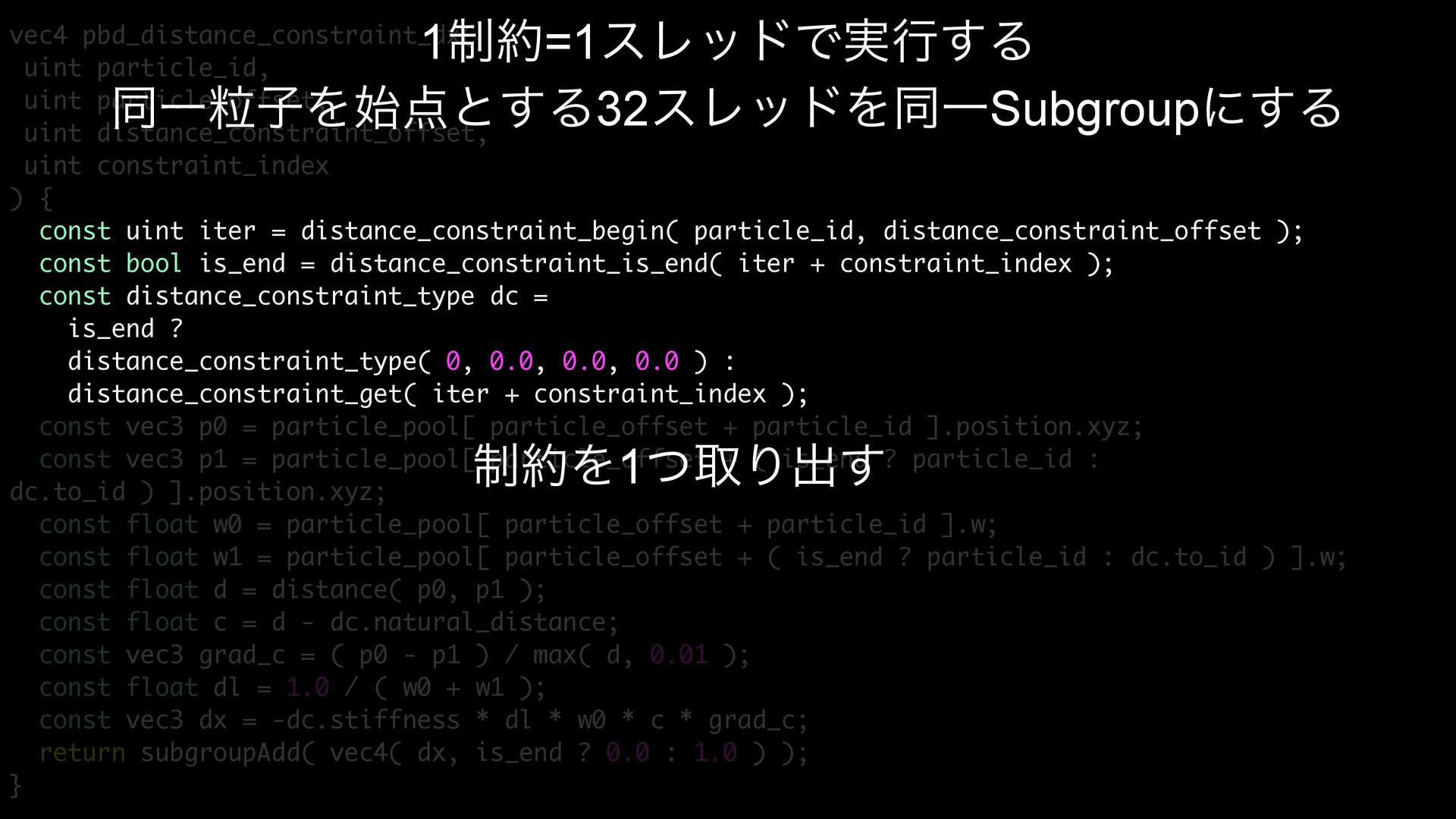
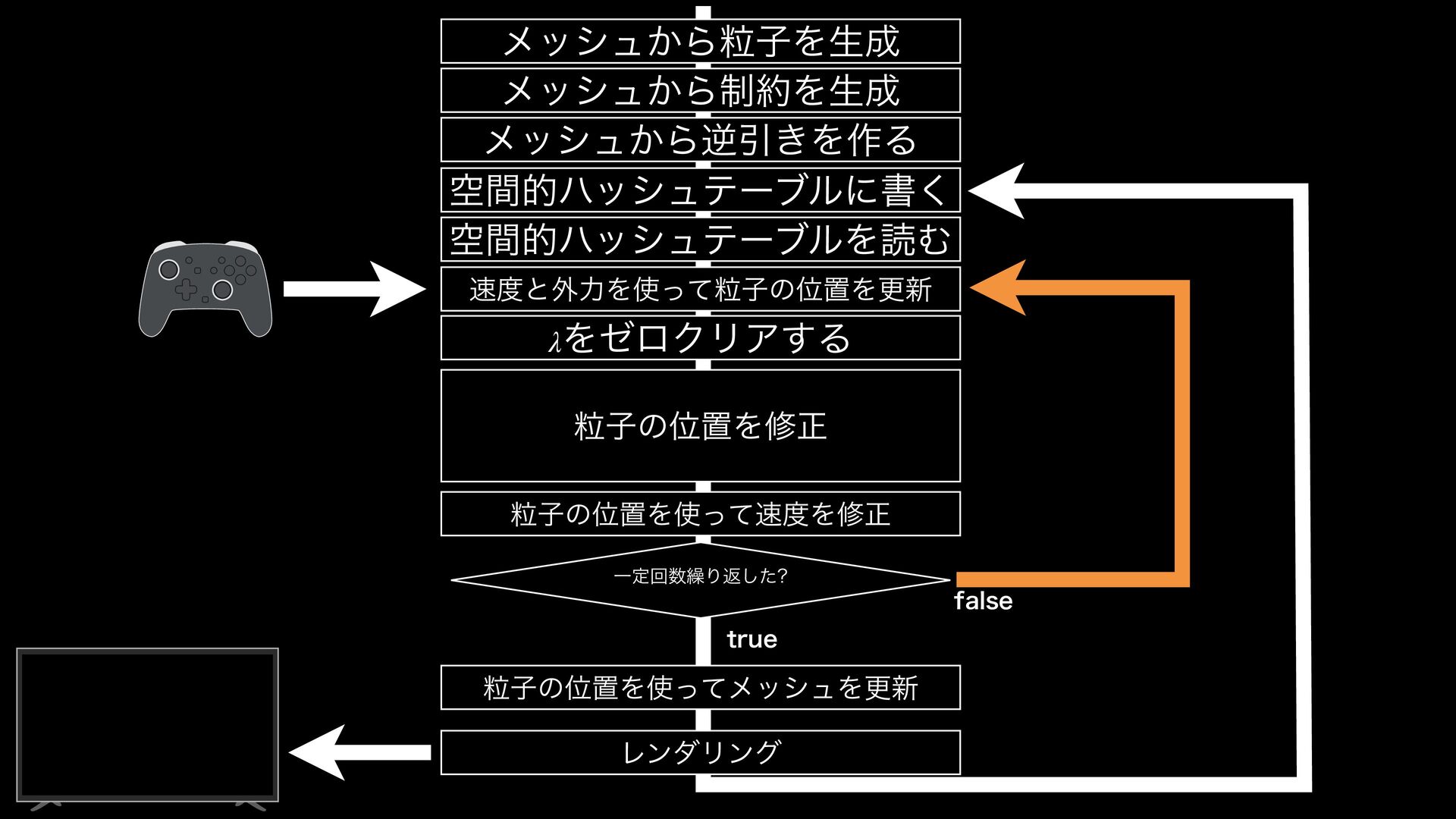
id_offset, float stiffness ) { distance_constraint_insert( i0, i1, id_offset, stiffness, distance( p0, p1 ) ); distance_constraint_insert( i1, i2, id_offset, stiffness, distance( p1, p2 ) ); distance_constraint_insert( i2, i0, id_offset, stiffness, distance( p2, p0 ) ); } void distance_constraint_insert( mat4 l2w, uint accessor_id, uint input_primitive_id, uint id_offset, float stiffness ) { const uint i0 = read_index( accessor_pool[ accessor_id + 0 ], input_primitive_id * 3u + 0u ); const uint i1 = read_index( accessor_pool[ accessor_id + 0 ], input_primitive_id * 3u + 1u ); const uint i2 = read_index( accessor_pool[ accessor_id + 0 ], input_primitive_id * 3u + 2u ); const vec4 p0 = l2w * read_vertex( accessor_pool[ accessor_id + 1 ], i0, vec4( 0.0, 0.0, 0.0, 1.0 ) ); const vec4 p1 = l2w * read_vertex( accessor_pool[ accessor_id + 1 ], i1, vec4( 0.0, 0.0, 0.0, 1.0 ) ); const vec4 p2 = l2w * read_vertex( accessor_pool[ accessor_id + 1 ], i2, vec4( 0.0, 0.0, 0.0, 1.0 ) ); distance_constraint_insert( i0, i1, i2, p0.xyz/p0.w, p1.xyz/p1.w, p2.xyz/p2.w, id_offset, stiffness ); } 1ϓϦϛςΟϒ=1εϨουͰ࣮ߦ͢Δ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_55.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_56.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_57.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_58.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![if( orig == 0 ) { distance_constraint_pool[ gcid ].stiffness =](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_63.jpg){kind=link}
{kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_65.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_66.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_67.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_68.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_73.jpg){kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_74.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![void main() { const resource_pair_type id = resource_pair[ push_constants.instance ];](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_104.jpg){kind=link}
![if( particle_pool[ mesh.particle_offset + particle_id ].attached != 0 ) return;](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_105.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![γϡʔΞิߦྻ ਖ਼ଇͳϒϩοΫߦྻ ͕͋Δ࣌ ͳΒ [ A B C D] [](https://files.speakerdeck.com/presentations/72f4f68e322b472e903c1d4f08991fca/slide_123.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}