Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
後処理で位置情報を補正する技術を試してみた
Search
Kensuke Takahara
December 05, 2024
Technology
0
370
後処理で位置情報を補正する技術を試してみた
Mobility Night #1 - GPS・位置情報 -
で発表した内容です。
Kensuke Takahara
December 05, 2024
Tweet
Share
Other Decks in Technology
See All in Technology
組織全体で実現する標準監視設計
yuobayashi
3
490
めちゃくちゃ開発するQAエンジニアになって感じたメリットとこれからの課題感
ryuhei0000yamamoto
0
110
Oracle Cloud Infrastructure IaaS 新機能アップデート 2025/12 - 2026/2
oracle4engineer
PRO
0
150
Keycloak を使った SSO で CockroachDB にログインする / CockroachDB SSO with Keycloak
kota2and3kan
0
150
Lambda Web AdapterでLambdaをWEBフレームワーク利用する
sahou909
0
160
身体を持ったパーソナルAIエージェントの 可能性を探る開発
yokomachi
1
130
TypeScript 7.0の現在地と備え方
uhyo
7
1.5k
Kubernetesにおける推論基盤
ry
1
400
AWS DevOps Agent vs SRE俺 / AWS DevOps Agent vs me, the SRE
sms_tech
3
880
OpenClaw を Amazon Lightsail で動かす理由
uechishingo
0
150
今のWordPress の制作手法ってなにがあんねん?(改) / What’s the Deal with WordPress Development These Days?
tbshiki
0
500
AI実装による「レビューボトルネック」を解消する仕様駆動開発(SDD)/ ai-sdd-review-bottleneck
rakus_dev
0
150
Featured
See All Featured
Impact Scores and Hybrid Strategies: The future of link building
tamaranovitovic
0
230
Six Lessons from altMBA
skipperchong
29
4.2k
Unlocking the hidden potential of vector embeddings in international SEO
frankvandijk
0
200
ラッコキーワード サービス紹介資料
rakko
1
2.7M
Fashionably flexible responsive web design (full day workshop)
malarkey
408
66k
Navigating Team Friction
lara
192
16k
Templates, Plugins, & Blocks: Oh My! Creating the theme that thinks of everything
marktimemedia
31
2.7k
The Curious Case for Waylosing
cassininazir
0
270
Un-Boring Meetings
codingconduct
0
230
Bootstrapping a Software Product
garrettdimon
PRO
307
120k
Sharpening the Axe: The Primacy of Toolmaking
bcantrill
46
2.7k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.1k
Transcript
機密・専有情報 株式会社Luupによる個別の明示的な承諾を得ることなく、この資料を使用することを固く禁じます。 株式会社Luup 高原健輔 2024/12/05 後処理で位置情報を補正する技術 を試してみた
はじめに
Luup, Inc. - Confidential and Proprietary 3 提供サービス「 LUUP」 街じゅうの電動マイクロモビリティに、
どこからでも乗れて好きな場所に返せる シェアリングサービス LUUPは電動キックボードと電動アシスト自転車のシェアリングサービスで す。 LUUPのポートは街じゅうに広がっています。駅前や繁華街、住宅街やコン ビニなど、近くのポートから好きなタイミングで借りて、好きな場所に返すこと ができます。 毎日の最寄り駅までの移動や、「歩くには少し遠いな」と感じる場所へ向か うこと、できれば避けたい坂道をのぼることも、 “早く・ラクに・気持ちのよい “ライドに変えることができます。 現在は、東京・大阪・横浜・京都・神戸・名古屋などで展開しており、さらに拡 大を目指しています。
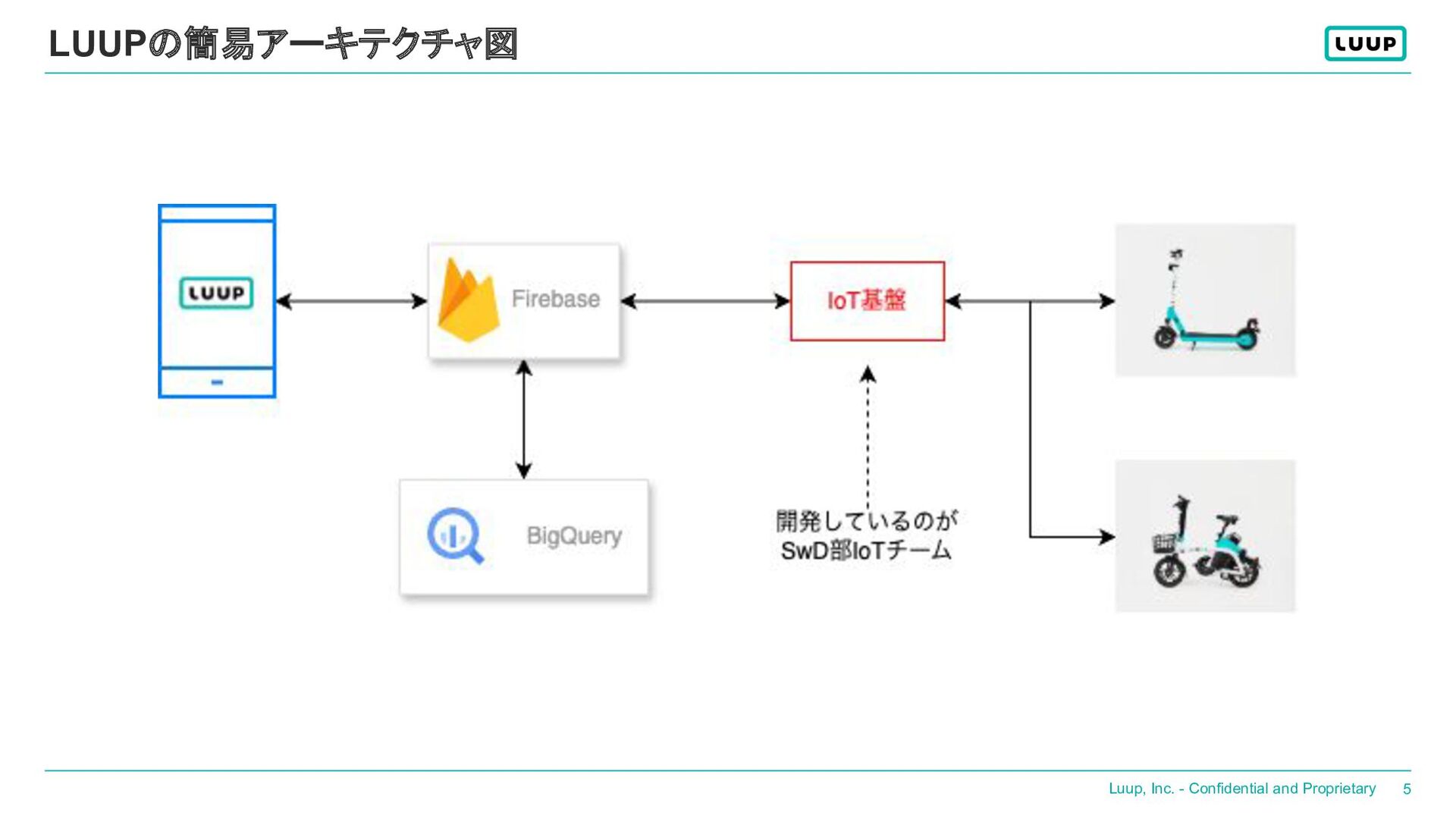
Luup, Inc. - Confidential and Proprietary 4 LUUPの簡易アーキテクチャ図
Luup, Inc. - Confidential and Proprietary 5 LUUPの簡易アーキテクチャ図
Luup, Inc. - Confidential and Proprietary 6 IoTチームの仕事 はんだ付けから クラウドインフラまで
Luup, Inc. - Confidential and Proprietary 7 IoTチームの仕事 その他にも •
マイクロモビリティ(車両)メッセージを処理するサーバーアプリケーション開発 • 車両FWのメッセージ動作確認 • 車両用IoT SIMの通信品質検証 • BLE通信周りの要件まとめ • 車両位置情報の補正技術調査 などなど
Luup, Inc. - Confidential and Proprietary 8 自己紹介 高原 健輔
株式会社Luup SwD部 IoTチーム リーダー 家電組み込み(2年) → スマートホーム系IoTシステム(6年) → Luup 趣味は空手
今回のテーマ
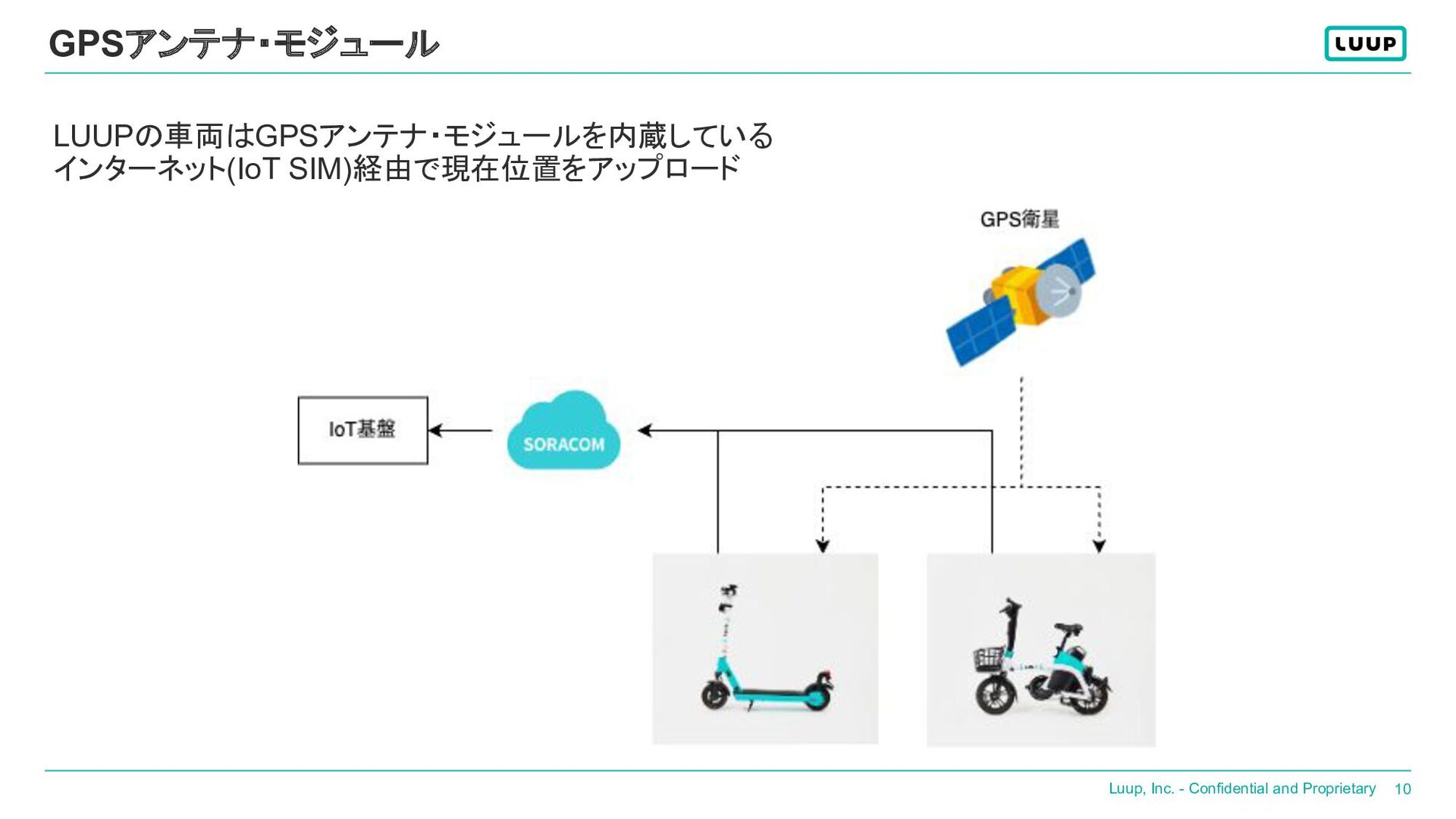
Luup, Inc. - Confidential and Proprietary 10 GPSアンテナ・モジュール LUUPの車両はGPSアンテナ・モジュールを内蔵している インターネット(IoT
SIM)経由で現在位置をアップロード
Luup, Inc. - Confidential and Proprietary 11 車両の位置情報を正確に取りたい! 下記ユースケースにより位置情報が正確に取ることは重要なテーマ •
LUUPユーザーが車両にスムーズにライドするため現在位置把握 ◦ ユーザーが誤った場所(ポート)に車両を返却してしまうケースも • バッテリー交換や修理のオペレーション GPSから取得できる位置情報は、通信環境や周辺の遮蔽物の状況等に大きく左右されうる そのため精度を改善するための何らかの解決策が必要
Luup, Inc. - Confidential and Proprietary 12 衛星の誤差 https://www.terasat.co.jp/archives/6847.html 課題1(測位誤差要因)
出典:テラサット・ジャパン株式会社「 GNSS測位精度における主な誤差原因」 • 衛星の軌道情報による誤差 ◦ 衛星から送信される信号には軌道情報(エフェメリス)や時刻補正情報が含まれている エフェメリスは地上の管理システムが計算するので実際の軌道とズレることがある 衛星は2時間に1回エフェメリスを更新する • 衛星クロック誤差 ◦ 衛星は高精度な原子時計が搭載されている 原子時計の時刻ずれも地上の管理システムで補正している 衛星の時刻が1マイクロ秒(1秒の100万分の1)ずれると約300m誤差が出る
Luup, Inc. - Confidential and Proprietary 13 電波伝達の誤差 https://www.terasat.co.jp/archives/6847.html 出典:テラサット・ジャパン株式会社「
GNSS測位精度における主な誤差原因」 課題1(測位誤差要因) • 電離層遅延誤差 ◦ 電離層内は高度によって 異なる電子密度の層 • 対流圏遅延誤差 ◦ 対流圏は地上から約10km程度までの濃い大気が存在する領域 ◦ 衛星の仰角・方位角と伝搬経路上の気温・気圧・水蒸気分圧で遅延量が変わる
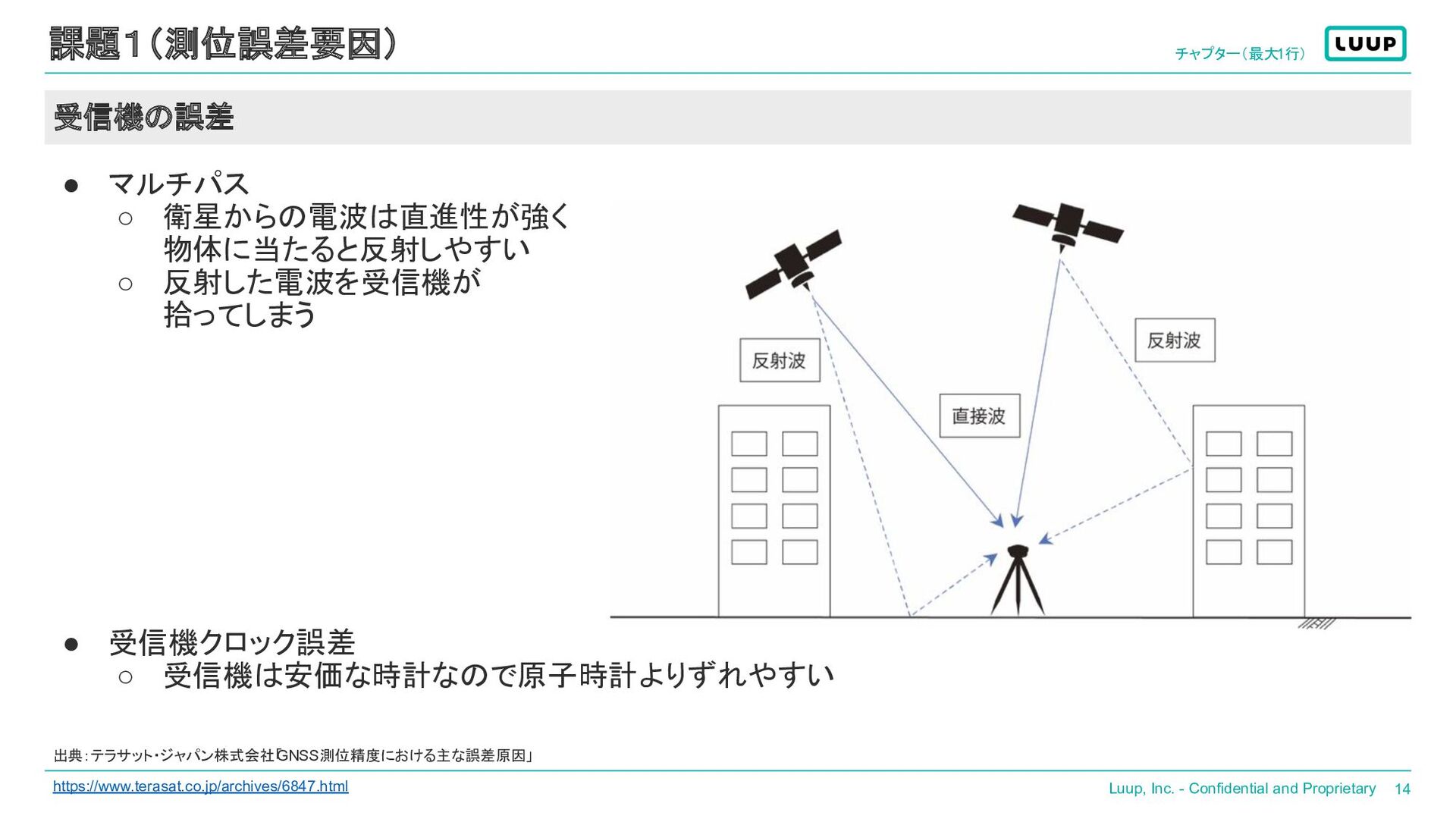
Luup, Inc. - Confidential and Proprietary 14 受信機の誤差 チャプター(最大1行) https://www.terasat.co.jp/archives/6847.html
出典:テラサット・ジャパン株式会社「 GNSS測位精度における主な誤差原因」 課題1(測位誤差要因) • マルチパス ◦ 衛星からの電波は直進性が強く 物体に当たると反射しやすい ◦ 反射した電波を受信機が 拾ってしまう • 受信機クロック誤差 ◦ 受信機は安価な時計なので原子時計よりずれやすい
Luup, Inc. - Confidential and Proprietary 15 課題2(補正手段) GPS精度を向上させるための方法は存在するがコストが高い •
補正情報を受信するアンテナ・モジュール ◦ アンテナ・モジュールが高価 • 補正情報をインターネット経由で車両に伝達 ◦ IoT SIM通信料金の上昇 LUUPは大量の車両を運用するため、運用コストを持続可能なラインにしたい
Luup, Inc. - Confidential and Proprietary 16 今回のメインテーマ GPS情報を後処理で安価に補正する なるべくコスト増に繋がる手段は使用せずに
GPSモジュールから得た測位情報と補正情報を組み合わせ、計算環境(サーバー/PC)で後処理する
位置補正技術
Luup, Inc. - Confidential and Proprietary 18 https://www.gsi.go.jp/denshi/denshi_aboutGNSS.html GNSS Global
Navigation Satellite System(全球測位衛星システム)の頭文字をとってGNSS 人工衛星を利用して地上の現在位置情報を測定するシステムのこと 下記システムが存在 • みちびき (日本) • GPS (アメリカ) • GLONASS (ロシア) • Galileo(EU) など 出典:国土地理院「GNSS測位とは」
Luup, Inc. - Confidential and Proprietary 19 単独測位 衛星から送信される信号(衛星の位置・送信時刻)を1台の受信機で受信する https://www.gsi.go.jp/denshi/denshi_aboutGNSS.html
出典:国土地理院「GNSS測位とは」
Luup, Inc. - Confidential and Proprietary 20 相対測位 衛星から送信される信号をそれぞれの受信機に到達する時間差を測定して、 2点間の相対的な位置関係を測定する
https://www.gsi.go.jp/denshi/denshi_aboutGNSS.html 出典:国土地理院「GNSS測位とは」
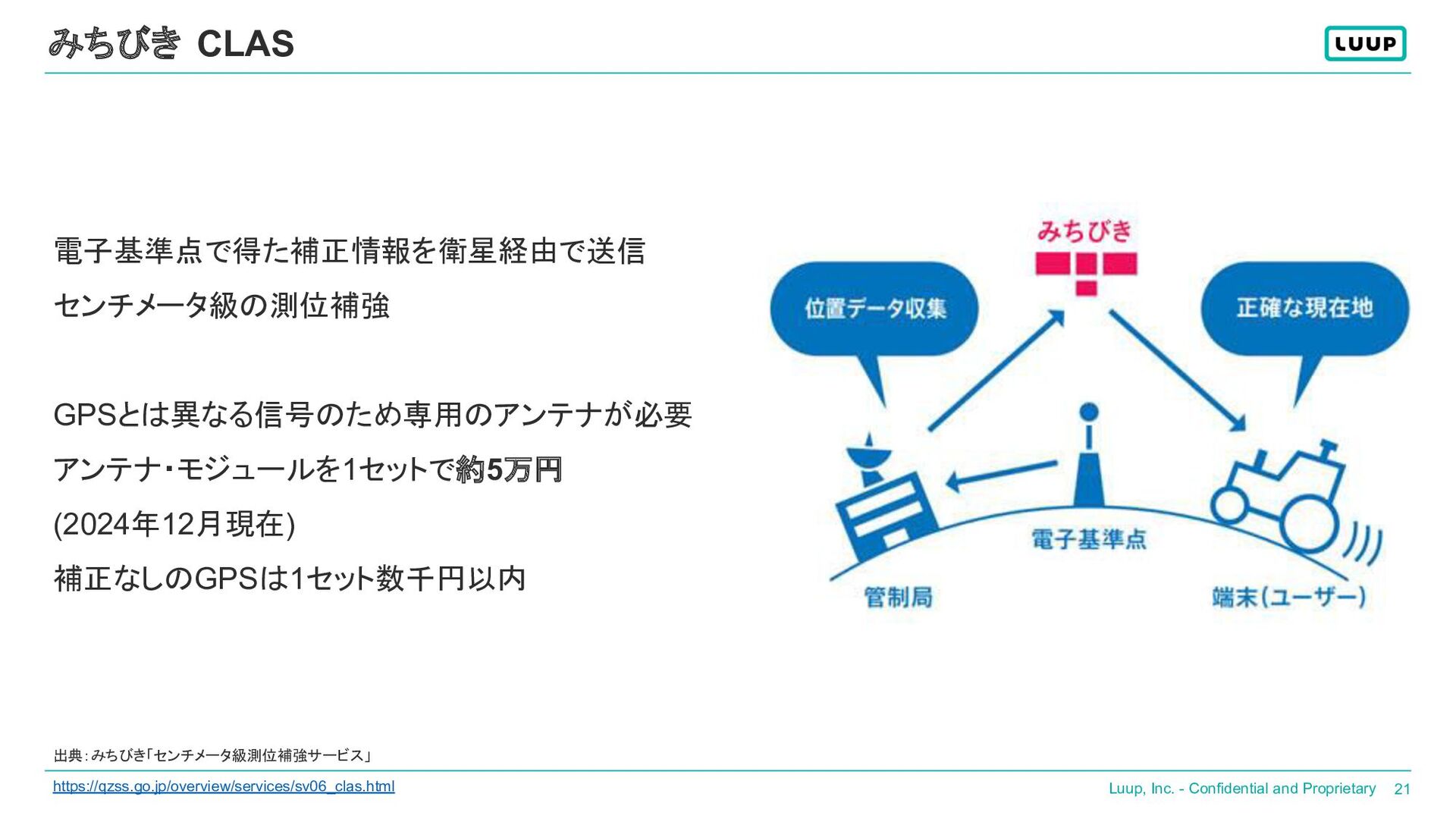
Luup, Inc. - Confidential and Proprietary 21 出典:みちびき「センチメータ級測位補強サービス」 みちびき CLAS
電子基準点で得た補正情報を衛星経由で送信 センチメータ級の測位補強 GPSとは異なる信号のため専用のアンテナが必要 アンテナ・モジュールを1セットで約5万円 (2024年12月現在) 補正なしのGPSは1セット数千円以内 https://qzss.go.jp/overview/services/sv06_clas.html
Luup, Inc. - Confidential and Proprietary 22 RTK (Real Time
Kinematic) 方式 予め位置が分かっている基準局と位置を求めたい観測点で観測し、 両点で位相の測定を行い、データを観測点へ送信して位置の計算を行う https://www.gsi.go.jp/denshi/denshi_aboutGNSS.html 出典:国土地理院「GNSS測位とは」
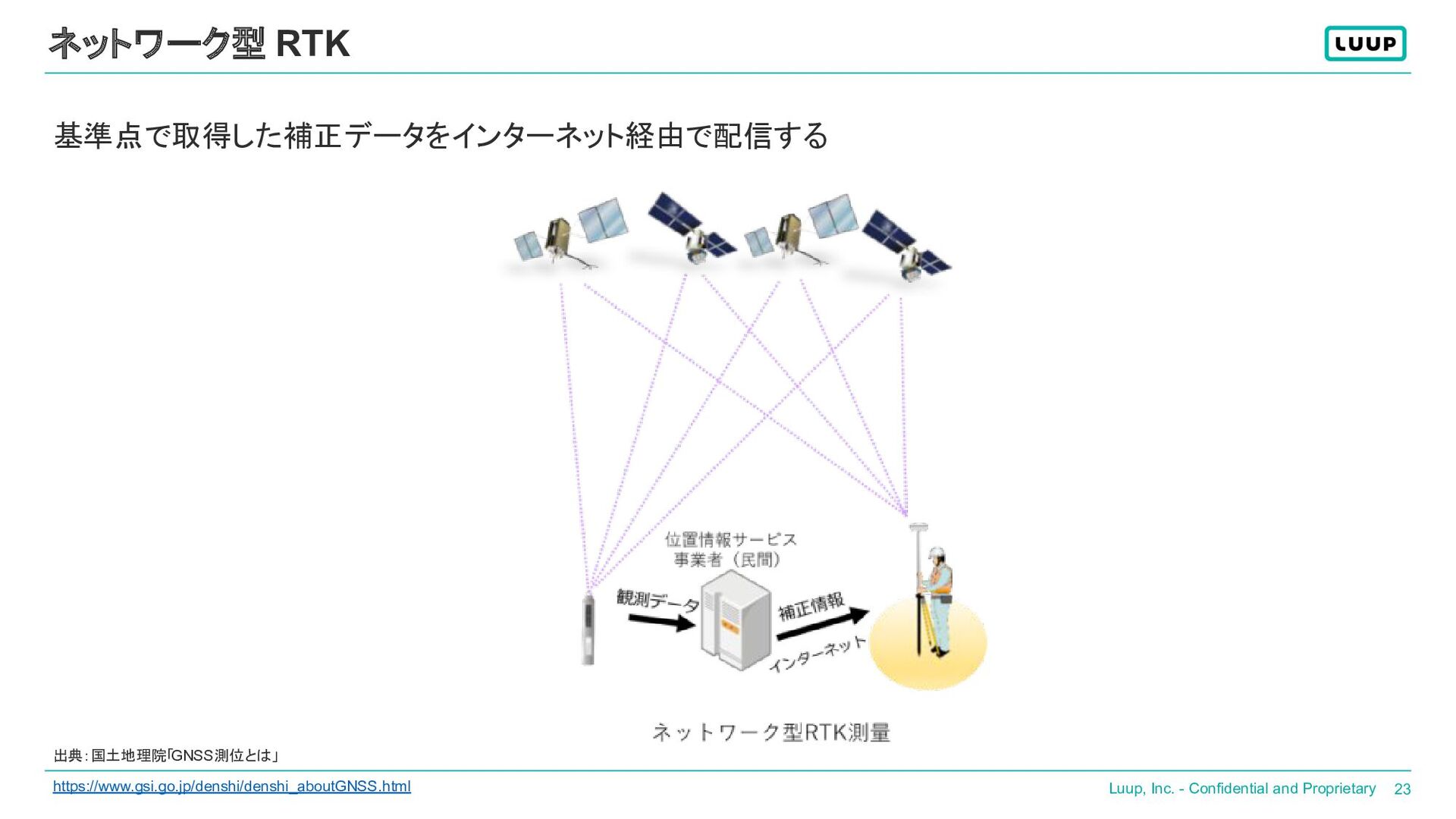
Luup, Inc. - Confidential and Proprietary 23 ネットワーク型 RTK 基準点で取得した補正データをインターネット経由で配信する
https://www.gsi.go.jp/denshi/denshi_aboutGNSS.html 出典:国土地理院「GNSS測位とは」
Luup, Inc. - Confidential and Proprietary 24 ネットワーク型 RTKの通信データ量 想定される通信データ量
• 1回の補正情報メッセージサイズ (RTCM 3.X タイプ 1077と仮定) ◦ 300~500Byte • 送信頻度 ◦ 1Hz メッセージサイズを400Byteと仮定すると、0.97GByte/月 IoTとしては小さくない通信量
Luup, Inc. - Confidential and Proprietary 25 出典:ADVANCED NAVIGATION「Post-Processed Kinematics
(PPK)」 PPK (Post Processing Kinematic) 方式 観測点と基準局の受信データを後処理で補正する 後処理なのでリアルタイム性はない https://www.advancednavigation.com/glossary/post-processed-kinematics/
Luup, Inc. - Confidential and Proprietary 26 PPK方式のメリット・デメリット • メリット
◦ 観測点受信機のデータ通信量を抑えることができる ◦ 測位・メタデータが取得できれば良いので、特別な設備が必要ない • デメリット ◦ リアルタイム性がない ▪ 高精度の測位情報を得るために数分〜10分かかる • アンビギュイティ解消 測位情報には搬送波を利用しているため、波の繰り返し数(整数アンビギュイティ)が解消 するためにしばらくの期間を待つ必要がある ◦ (学習コスト高い……)
Luup, Inc. - Confidential and Proprietary 27 補正技術まとめ リアルタイム性 設備コスト
インターネット通信量 みちびき CLAS ◦ 高価 なし ネットワーク型RTK ◦ 安価 多い PPK × 安価 少ない 大量の車両の現在位置を追跡するために、今回はPPKを検証しました! • みちびき CLAS:補正情報受信装置を車両に取り付ける • ネットワーク型RTK:補正情報をインターネット経由で車両に送信する • PPK:受信した測位・メタデータをインターネット経由でアップロードして後処理で補正
PPK検証手法
Luup, Inc. - Confidential and Proprietary 29 検証環境 • 場所はオープンスカイ環境
(都内某スーパーの屋上駐車場) • 受信機を静止させて1時間計測 • 構成図
Luup, Inc. - Confidential and Proprietary 30 Amazon NEO-8MT GPSアンテナ・モジュール
• GPSアンテナ ◦ BT-345AJ ▪ L1, L2, L5, L6 の 4 周波対応 ▪ 約1万円 • GPSモジュール ◦ NEO-M8T ▪ ublox社製 • メーカー提供ツール ◦ u-center ▪ L1波のみ対応 ▪ 約5千円 (開発ボード) イメージ
Luup, Inc. - Confidential and Proprietary 31 提供:国土地理院 https://terras.gsi.go.jp/ 出典:国土地理院「電子基準点データ提供サービス」
電子基準局データ 国土地理院が無料で電子基準局で観測したデータを提供 サンプリングデータは30秒間隔 日本全域をカバー
Luup, Inc. - Confidential and Proprietary 32 RTKLIB https://www.rtklib.com/ 補正処理
OSSのGNSSデータ処理ライブラリ 開発者は日本人の高須知二氏
PPK検証結果
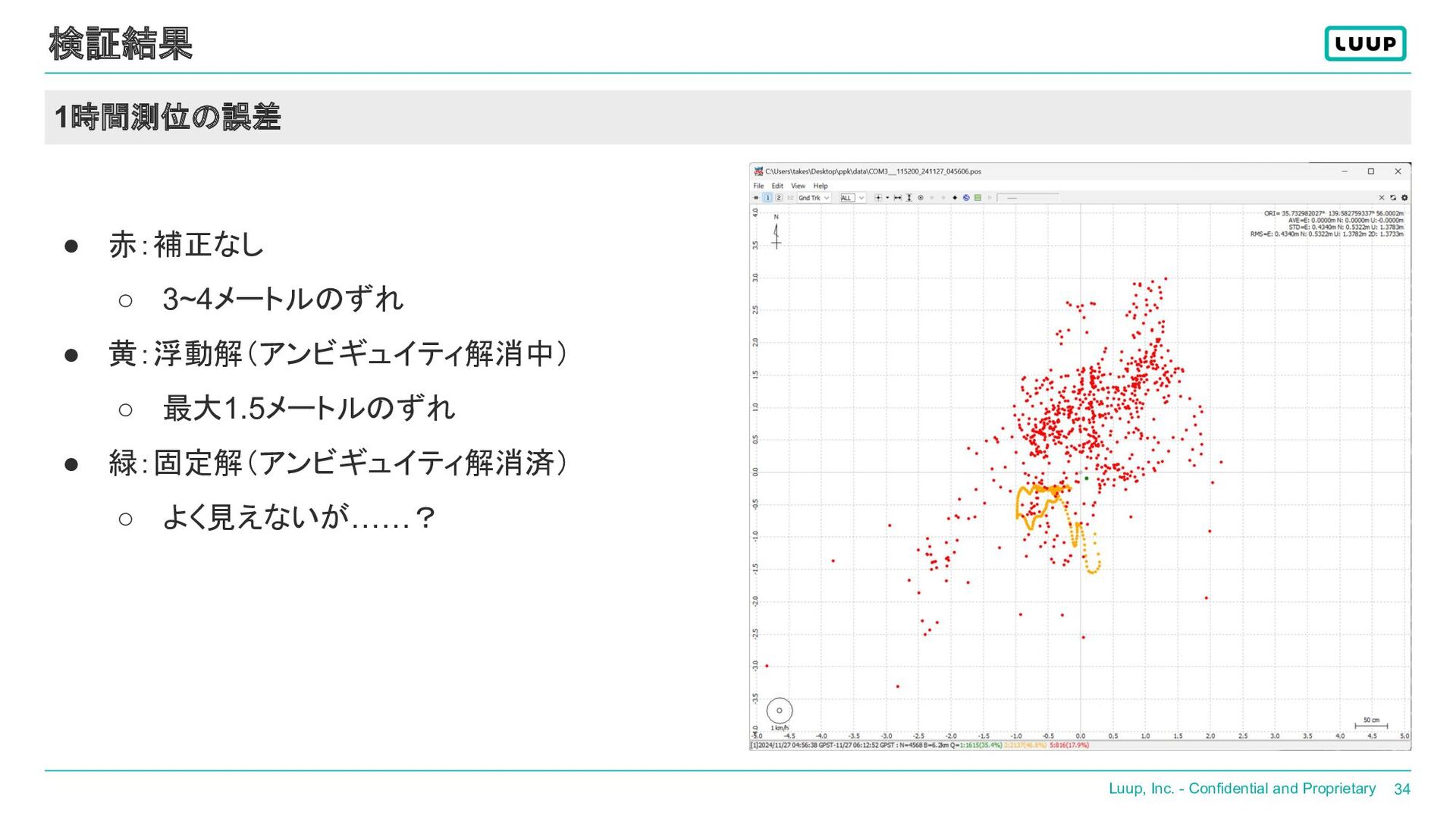
Luup, Inc. - Confidential and Proprietary 34 1時間測位の誤差 検証結果 •
赤:補正なし ◦ 3~4メートルのずれ • 黄:浮動解(アンビギュイティ解消中) ◦ 最大1.5メートルのずれ • 緑:固定解(アンビギュイティ解消済) ◦ よく見えないが……?
Luup, Inc. - Confidential and Proprietary 35 • 緑:固定解(アンビギュイティ解消済) ◦
数ミリメートルに収まっている 固定解誤差の拡大 検証結果
Luup, Inc. - Confidential and Proprietary 36 アンビギュイティ解消の時間経過 検証結果 上から東西・南北・上下の誤差グラフ
横軸は時間経過 最後の10分は基準局のデータがないので 精度が悪い 収束(黄->緑)に10分ほどかかっている
Luup, Inc. - Confidential and Proprietary 37 まとめ 検証結果 •
シンプルなPPKの構成で、高精度な位置情報補正が実現した • 大量の車両現在位置追跡がサーバーサイドで実現できる可能性あり 今後の課題 • 環境のバリエーションを実際のユースケースに寄せて検証 ◦ 高層ビルが多い都市部など • 30秒間隔の基準局データでは移動中のモビリティには向かない ◦ 高頻度の基準局データを民間事業者から購入して検証
https://recruit.luup.sc/ ご清聴ありがとうございました ソフトウェアエンジニア 募集中です 詳細は採用ページをご覧ください
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}