Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Jetson NanoとGR-ROSEで始めるROS2
Search
lutecia16v
January 07, 2020
Technology
2.3k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Jetson NanoとGR-ROSEで始めるROS2
第4回 Jetsonユーザー会LT資料
lutecia16v
January 07, 2020
More Decks by lutecia16v
See All by lutecia16v
EDF-IDF Programming Guidを読む - JTAG Debugging 編 -
lutecia16v
1
400
GR-ROSEとROSを使ってコマンドサーボの現在位置をWebブラウザで表示してみる
lutecia16v
0
1.7k
GR-ROSEでROS/ROS2
lutecia16v
1
1.9k
がじぇねるねでもROSしたい!
lutecia16v
1
160
GR-ROSE でroombaをコントロールする
lutecia16v
2
420
Other Decks in Technology
See All in Technology
Terraform共通モジュールをチーム横断で“変えられる”運用へ ― リリースと適用の分離
kekke_n
1
3.3k
インフラと開発の垣根を超えていき!〜元AWSインフラエンジニアがAWS開発で奮闘している話〜
hatahata021
3
300
Foxgloveについて 実際にExtensionを開発して公開するまでの話 / About Foxglove: The Story of Developing and Releasing an Extension
ry0_ka
0
290
AI Coding Agent時代のcdk-nagガードレール 〜組織ルールを強制CIで守り抜く設計の挑戦〜
mhrtech
3
390
ゴールデンパスは敷いただけでは道にならない ─ 企画部門のエンジニアが技術標準を事業価値に変えるまで
mhrtech
1
200
Making sense of Google’s agentic dev tools
glaforge
1
270
SoccerMaster: A Vision Foundation Model for Soccer Understanding
kzykmyzw
0
130
Compose 新機能総まとめ / What's New in Jetpack Compose
yanzm
0
310
AI Agent SaaS を支える自社仮想化基盤への挑戦と実運用 / ai-agent-saas-virtualization
flatt_security
3
4.1k
そのドキュメント、自動化しませんか?
yuksew
1
290
Gen3R: 3D Scene Generation Meets Feed-Forward Reconstruction
spatial_ai_network
0
130
関数型の考えを TypeScript に持ち込んで、テストしやすい純粋関数を増やす / Pure at the Core, Effects at the Edge: Bringing Functional Thinking into TypeScript
kaminashi
2
130
Featured
See All Featured
The agentic SEO stack - context over prompts
schlessera
0
850
CoffeeScript is Beautiful & I Never Want to Write Plain JavaScript Again
sstephenson
162
16k
個人開発の失敗を避けるイケてる考え方 / tips for indie hackers
panda_program
123
22k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Navigating Team Friction
lara
192
16k
Code Review Best Practice
trishagee
74
20k
Odyssey Design
rkendrick25
PRO
2
730
Building Better People: How to give real-time feedback that sticks.
wjessup
370
20k
Design and Strategy: How to Deal with People Who Don’t "Get" Design
morganepeng
133
19k
The Art of Programming - Codeland 2020
erikaheidi
57
14k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
Documentation Writing (for coders)
carmenintech
77
5.4k
Transcript
Jetson Nanoと GR-ROSEで始める ROS2 2019/1/7 第4回 Jetsonユーザー会 LT るぅて @lutecia16v
ROSとは? ROS (Robot Operating System)はソフトウェア開発者のロボット・ アプリケーション作成を支援するライブラリとツールを提供しています。 具体的には, ハードウェア抽象化, デバイスドライバ,ライブラリ,視覚化 ツール,
メッセージ通信,パッケージ管理などが提供されています. ROS はオープンソースの一つ, BSDライセンスにより, ライセンス化されてい ます。 ROS Wikiより http://wiki.ros.org/ja
ROS2とは? • ROSの次世代バージョン • ROS1とROS2は直接通信できない( bridgeを使うことで可能)、共存は可能 ➢ 複数ロボットでの運用 ➢ 小型の組込みシステム下での運用
➢ リアルタイム制御を必要とする運用 ➢ 不安定なネットワーク接続下での運用 ➢ 製品化を行う産業分野での開発 ➢ 製品化を推し進めるサイクルや開発におけるはっきりとした枠組 みが必要な開発 https://opensource-robotics.tokyo.jp/?p=4010
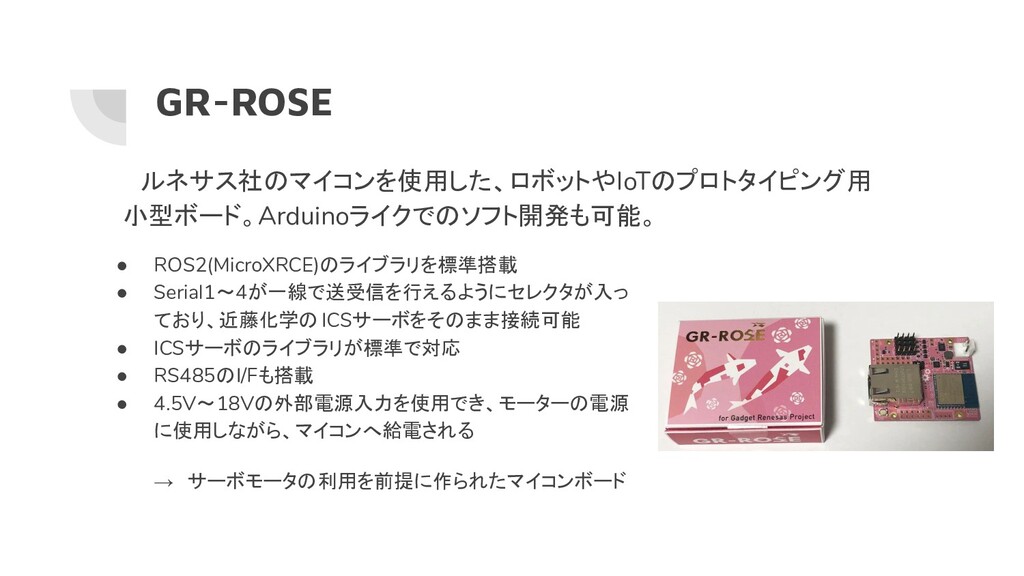
GR-ROSE ルネサス社のマイコンを使用した、ロボットやIoTのプロトタイピング用 小型ボード。Arduinoライクでのソフト開発も可能。 • ROS2(MicroXRCE)のライブラリを標準搭載 • Serial1~4が一線で送受信を行えるようにセレクタが入っ ており、近藤化学のICSサーボをそのまま接続可能 • ICSサーボのライブラリが標準で対応
• RS485のI/Fも搭載 • 4.5V~18Vの外部電源入力を使用でき、モーターの電源 に使用しながら、マイコンへ給電される → サーボモータの利用を前提に作られたマイコンボード
ICSサーボって? 近藤科学さんのコマンド司令型のサーボモーター ICSサーボを使ったロボット例
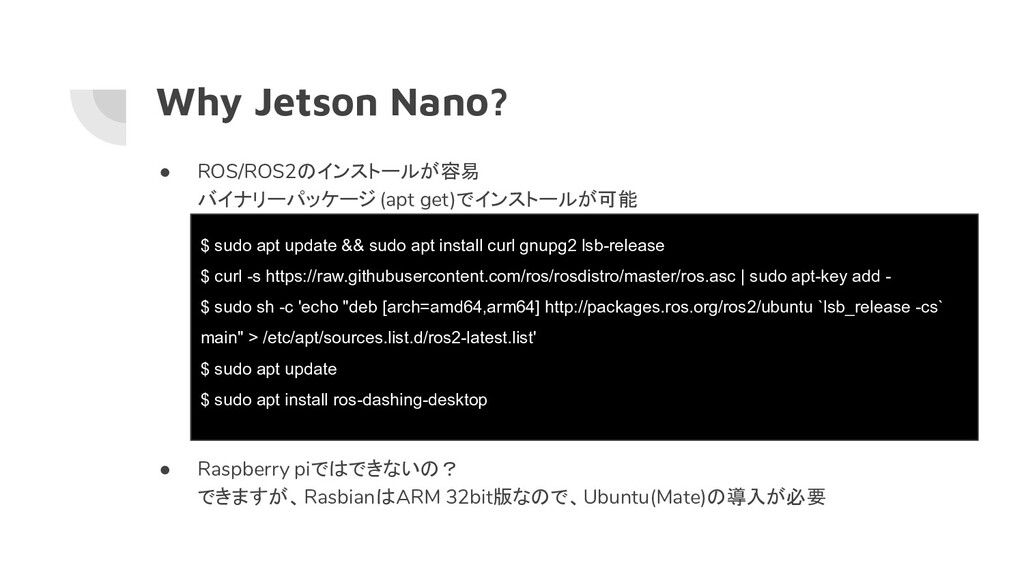
Why Jetson Nano? • ROS/ROS2のインストールが容易 バイナリーパッケージ (apt get)でインストールが可能 $ sudo
apt update && sudo apt install curl gnupg2 lsb-release $ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - $ sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list' $ sudo apt update $ sudo apt install ros-dashing-desktop • Raspberry piではできないの? できますが、RasbianはARM 32bit版なので、Ubuntu(Mate)の導入が必要
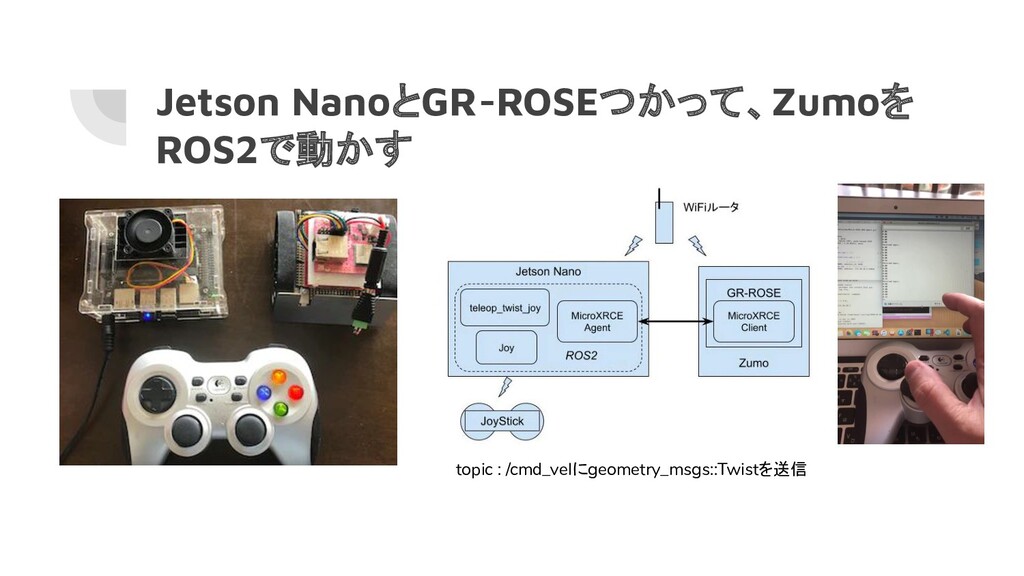
Jetson NanoとGR-ROSEつかって、Zumoを ROS2で動かす topic : /cmd_velにgeometry_msgs::Twistを送信
詳細については、、、 ROS Advent Calendar 2019 で書きました 「ROS2を使って、GR-ROSEでZumoを動かす」 https://qiita.com/lutecia16v/items/c8d6bd7a8a489256e898 技術書典8(2/29土曜)にGR-ROSEの同人誌を出す予定 https://techbookfest.org/event/tbf08
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}