Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
GR-ROSE でroombaをコントロールする
Search
lutecia16v
November 10, 2018
Technology
420
2
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
GR-ROSE でroombaをコントロールする
GR-ROSE プロデューサーミーティング (作品発表会)での発表資料です。
http://gadget.renesas.com/ja/event/2018/pm_rose2.html
lutecia16v
November 10, 2018
More Decks by lutecia16v
See All by lutecia16v
EDF-IDF Programming Guidを読む - JTAG Debugging 編 -
lutecia16v
1
400
GR-ROSEとROSを使ってコマンドサーボの現在位置をWebブラウザで表示してみる
lutecia16v
0
1.7k
GR-ROSEでROS/ROS2
lutecia16v
1
1.9k
Jetson NanoとGR-ROSEで始めるROS2
lutecia16v
0
2.3k
がじぇねるねでもROSしたい!
lutecia16v
1
160
Other Decks in Technology
See All in Technology
シンガポールで登壇してきます
yama3133
0
240
AI、CDK と協働する Full TypeScript アプリケーション開発 / Full TypeScript Application with AI and CDK
geekplus_tech
2
360
Control Planeで育てるBtoB SaaSの認証基盤 - SRE NEXT 2026
pokohide
1
2.6k
実践!既存 Project への AI-Driven Development 適用〜 一ヶ月で Project 唯一のフロントエンドエンジニアを作り出せ〜
lycorptech_jp
PRO
0
180
タスクの複雑さでモデルを選ぶ ── Thompson Samplingで動かす“トークン/コスト最適化
satohy0323
0
550
AI Agent SaaS を支える自社仮想化基盤への挑戦と実運用 / ai-agent-saas-virtualization
flatt_security
3
4.1k
DMM.com 購入改善推進チーム におけるCodeRabbitを用いた レビューフロー改善の一例
ysknsid25
2
660
AmplifyHostingConstructからSSRフレームワークのためのホスティング設計を考察する/amplify-hosting-construct
fossamagna
1
210
最適な自走を最小限の支援で — M&Aで拡大する組織で少人数SREが挑んだ1年 / SRE NEXT 2026
genda
0
1.4k
End-to-Endで考える信頼性 — LINEアプリにおける クライアント開発×SRE連携の実践
maruloop
4
4.5k
AIが実装を自走する時代の認知負債との戦い
lycorptech_jp
PRO
0
110
世界、断片、モデル。そして理解
ardbeg1958
1
130
Featured
See All Featured
From Legacy to Launchpad: Building Startup-Ready Communities
dugsong
0
260
4 Signs Your Business is Dying
shpigford
187
22k
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
390
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
460
Optimizing for Happiness
mojombo
378
71k
How To Stay Up To Date on Web Technology
chriscoyier
790
250k
AI in Enterprises - Java and Open Source to the Rescue
ivargrimstad
0
1.4k
Exploring the Power of Turbo Streams & Action Cable | RailsConf2023
kevinliebholz
37
6.5k
Amusing Abliteration
ianozsvald
1
230
Building a Modern Day E-commerce SEO Strategy
aleyda
45
9.1k
GraphQLとの向き合い方2022年版
quramy
50
15k
Stop Working from a Prison Cell
hatefulcrawdad
274
21k
Transcript
GR-ROSE でroombaを コントロールする - 2018 X’mas version - 2018.11.10 GR-ROSE作品発表会
るぅて(@lutecia16v)
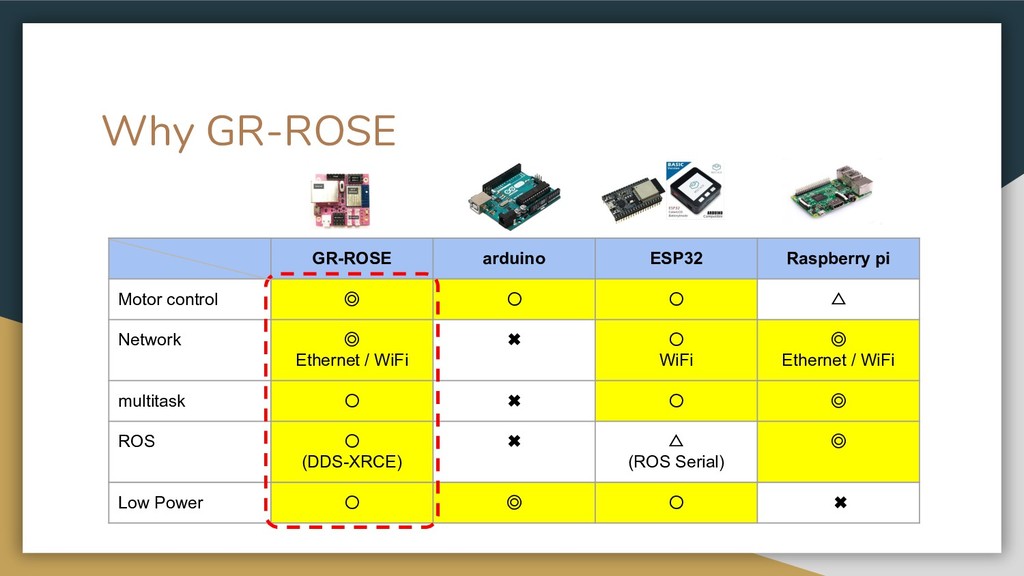
Why GR-ROSE GR-ROSE arduino ESP32 Raspberry pi Motor control ◎
〇 〇 △ Network ◎ Ethernet / WiFi ✖ 〇 WiFi ◎ Ethernet / WiFi multitask 〇 ✖ 〇 ◎ ROS 〇 (DDS-XRCE) ✖ △ (ROS Serial) ◎ Low Power 〇 ◎ 〇 ✖
Why ROS - 期待するもの 強力なフレームワークとツール群が利用可能に! For Navigation For Robot For
simulation Navigation Stack Others rqt rosconsole roslaunch Robot Web Tools
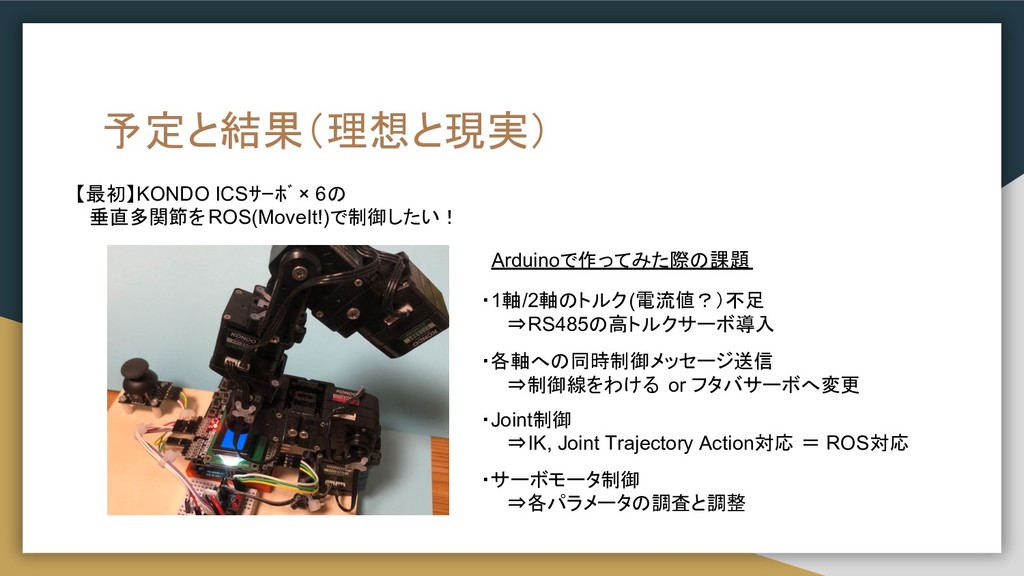
予定と結果(理想と現実) 【最初】KONDO ICSサーボ × 6の 垂直多関節をROS(MoveIt!)で制御したい! 【結果】Roombaを制御 ROS環境の構築 未完了
予定と結果(理想と現実) 【最初】KONDO ICSサーボ × 6の 垂直多関節をROS(MoveIt!)で制御したい! Arduinoで作ってみた際の課題 ・1軸/2軸のトルク(電流値?)不足 ⇒RS485の高トルクサーボ導入 ・Joint制御
⇒IK, Joint Trajectory Action対応 = ROS対応 ・サーボモータ制御 ⇒各パラメータの調査と調整 ・各軸への同時制御メッセージ送信 ⇒制御線をわける or フタバサーボへ変更
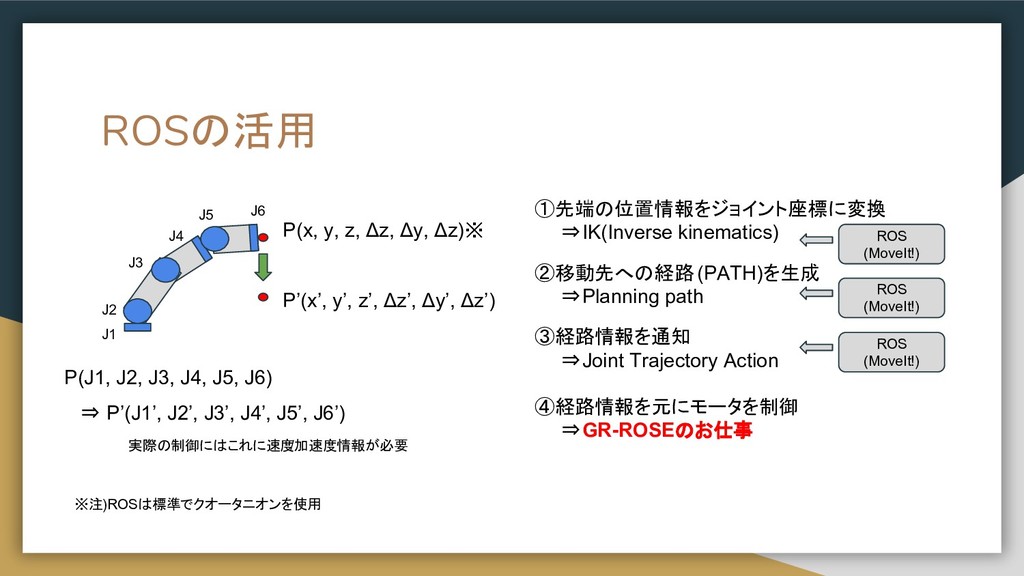
ROSの活用 J1 J2 J3 J4 J5 J6 P(x, y, z,
Δz, Δy, Δz)※ P’(x’, y’, z’, Δz’, Δy’, Δz’) P(J1, J2, J3, J4, J5, J6) ①先端の位置情報をジョイント座標に変換 ⇒IK(Inverse kinematics) ②移動先への経路(PATH)を生成 ⇒Planning path ③経路情報を通知 ⇒Joint Trajectory Action ④経路情報を元にモータを制御 ⇒GR-ROSEのお仕事 ※注)ROSは標準でクオータニオンを使用 ROS (MoveIt!) ROS (MoveIt!) ROS (MoveIt!) ⇒ P’(J1’, J2’, J3’, J4’, J5’, J6’) 実際の制御にはこれに速度 /加速度情報が必要
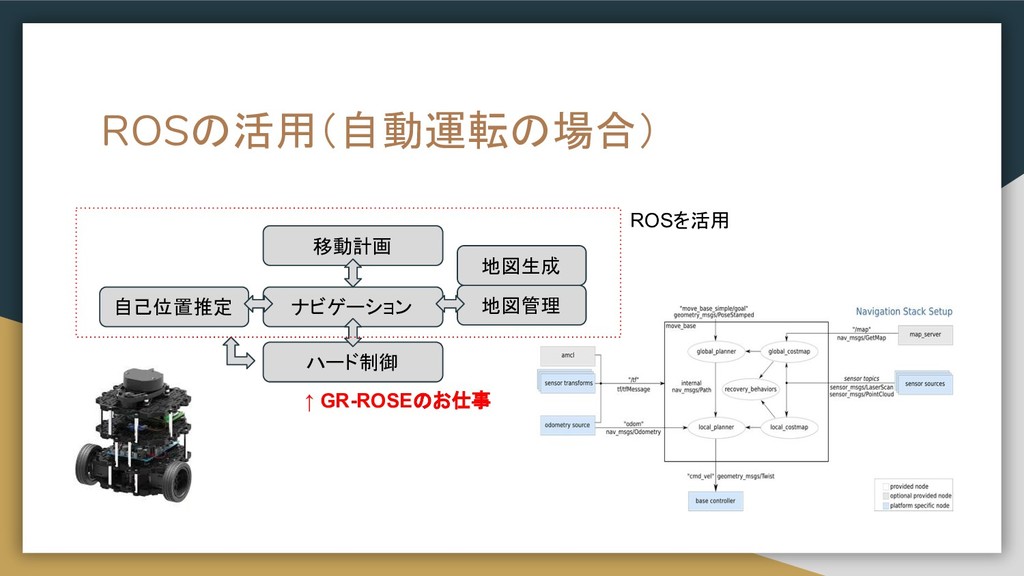
ROSの活用(自動運転の場合) 移動計画 ナビゲーション 自己位置推定 地図管理 ハード制御 地図生成 ↑ GR-ROSEのお仕事 ROSを活用
さて本題
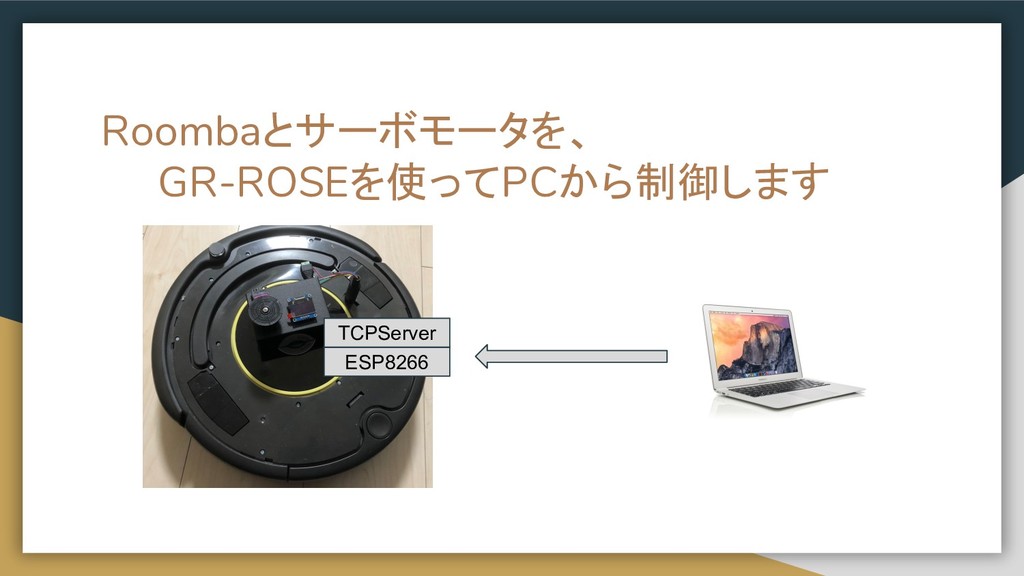
Roombaとサーボモータを、 GR-ROSEを使ってPCから制御します ESP8266 TCPServer
RoombaとGR-ROSEとの接続 ミニDIN 8pin : RXD, TXD, GND x 2, Vpwr,
BRC(未使用)を引き出し ⇒ Serial1と電源に接続
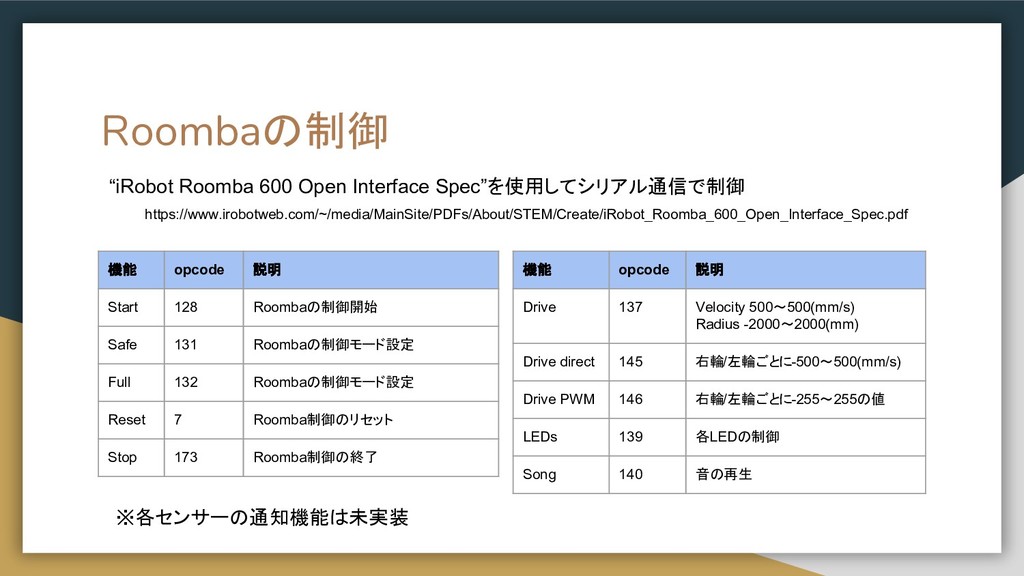
Roombaの制御 “iRobot Roomba 600 Open Interface Spec”を使用してシリアル通信で制御 https://www.irobotweb.com/~/media/MainSite/PDFs/About/STEM/Create/iRobot_Roomba_600_Open_Interface_Spec.pdf 機能 opcode
説明 Start 128 Roombaの制御開始 Safe 131 Roombaの制御モード設定 Full 132 Roombaの制御モード設定 Reset 7 Roomba制御のリセット Stop 173 Roomba制御の終了 機能 opcode 説明 Drive 137 Velocity 500~500(mm/s) Radius -2000~2000(mm) Drive direct 145 右輪/左輪ごとに-500~500(mm/s) Drive PWM 146 右輪/左輪ごとに-255~255の値 LEDs 139 各LEDの制御 Song 140 音の再生 ※各センサーの通知機能は未実装
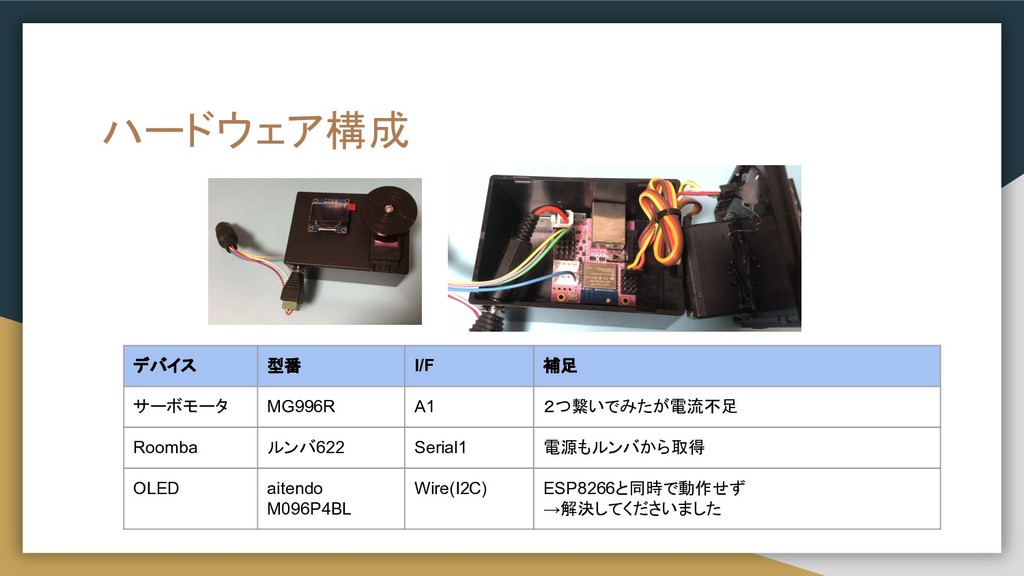
ハードウェア構成 デバイス 型番 I/F 補足 サーボモータ MG996R A1 2つ繋いでみたが電流不足 Roomba
ルンバ622 Serial1 電源もルンバから取得 OLED aitendo M096P4BL Wire(I2C) ESP8266と同時で動作せず →解決してくださいました
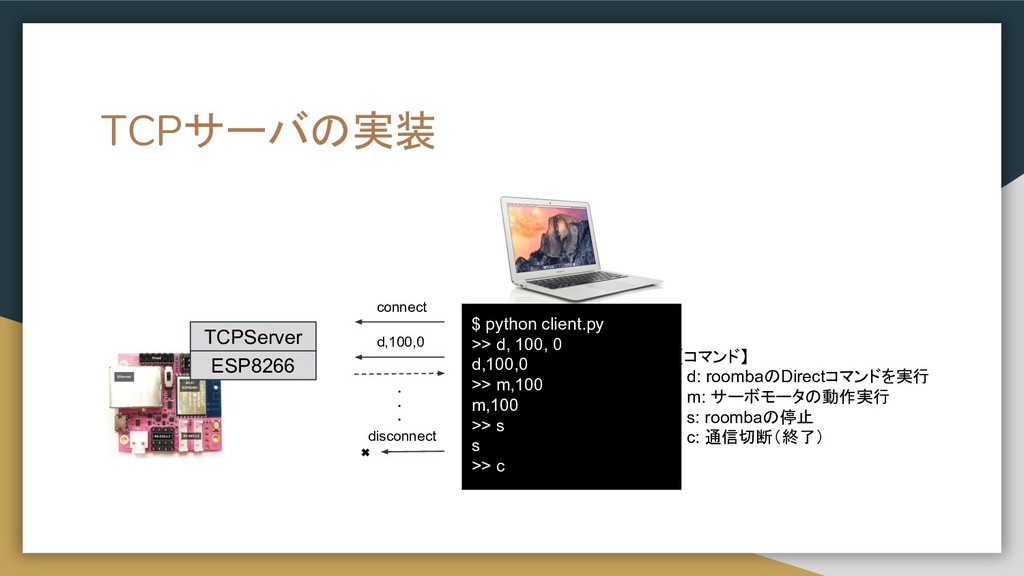
disconnect TCPサーバの実装 ESP8266 TCPServer $ python client.py >> d, 100,
0 d,100,0 >> m,100 m,100 >> s s >> c 【コマンド】 d: roombaのDirectコマンドを実行 m: サーボモータの動作実行 s: roombaの停止 c: 通信切断(終了) connect d,100,0 ・ ・ ・ ✖
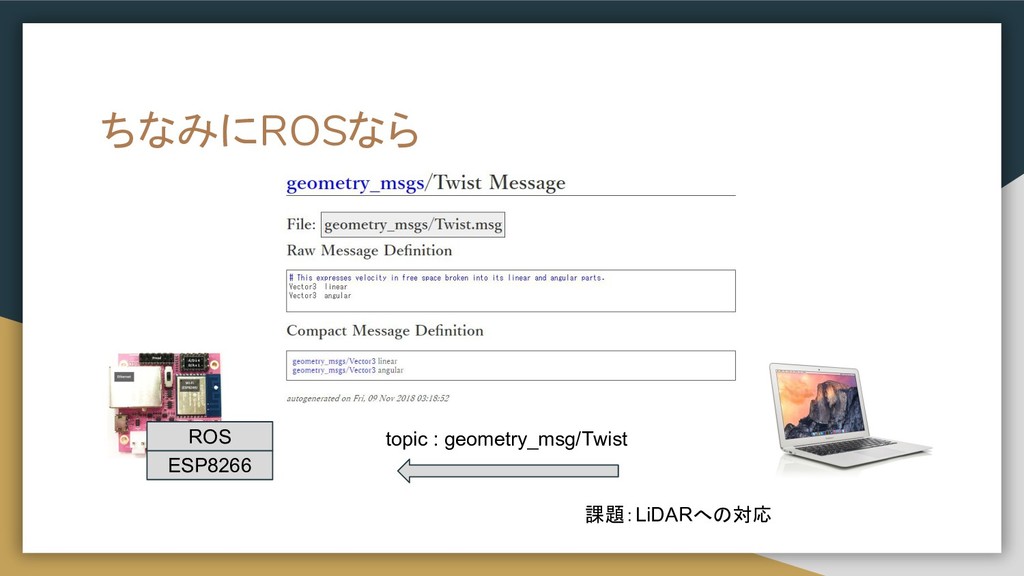
ちなみにROSなら ESP8266 ROS topic : geometry_msg/Twist 課題:LiDARへの対応
あじけないので、100均グッズで装飾
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}