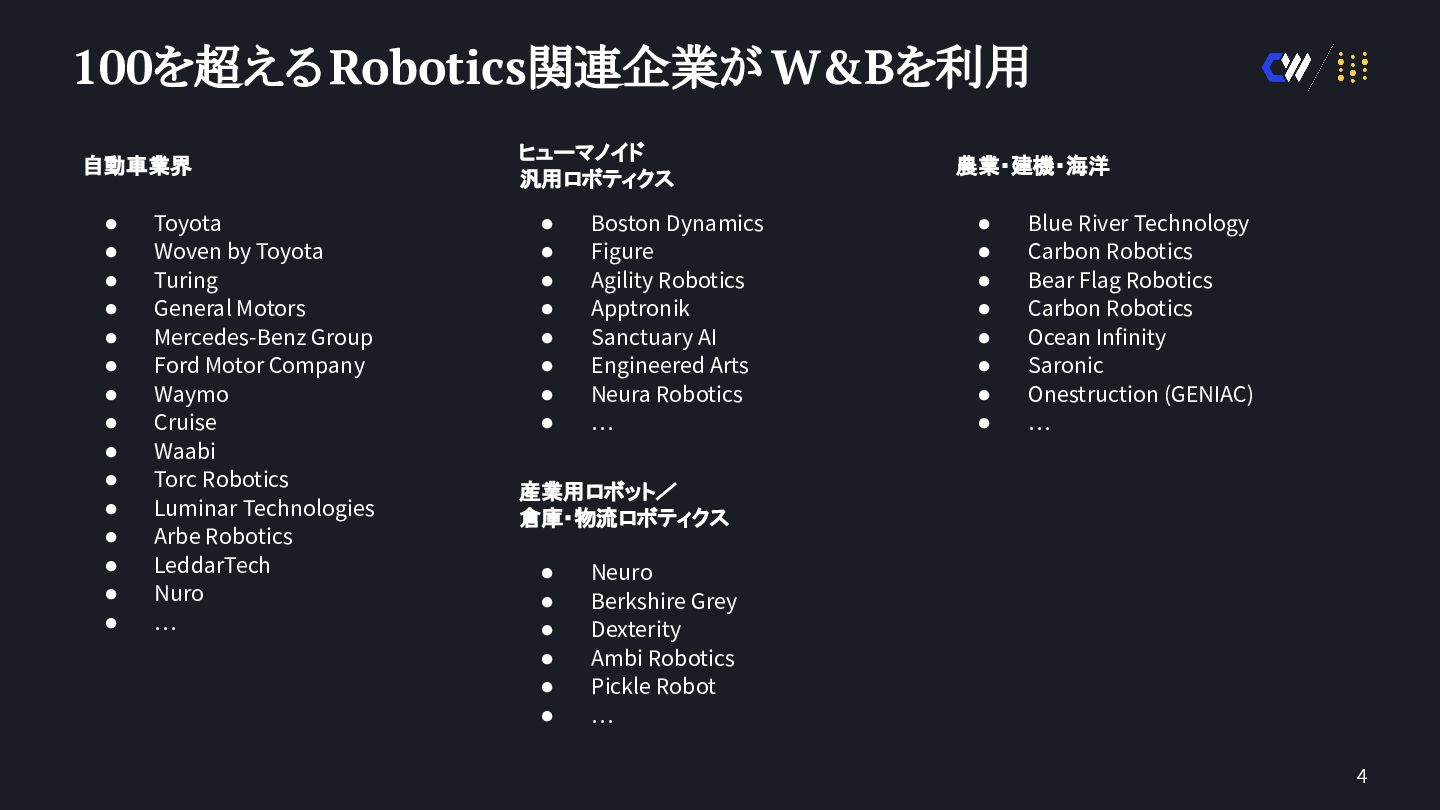
発にWeights & Biasesを利用 しています。私たちの理想 とする結果を得るには 最高 水準のツール が必要なの です。 Peter Welinder Vice President of Product OpenAI “ 2023年より日本進出 ~70 を超えるエンタープライズ企業が利用 Robotics関連企業の利用 ~100 を超えるRobotics関連企業がW&Bを利用 自動車業界 • Toyota • Woven by Toyota • Turing • General Motors • Mercedes-Benz Group • Ford Motor Company • Waymo • … ヒューマノイド汎用ロボティクス • Boston Dynamics • Figure • Agility Robotics • Apptronik • Sanctuary AI • Engineered Arts • Neura Robotics • …
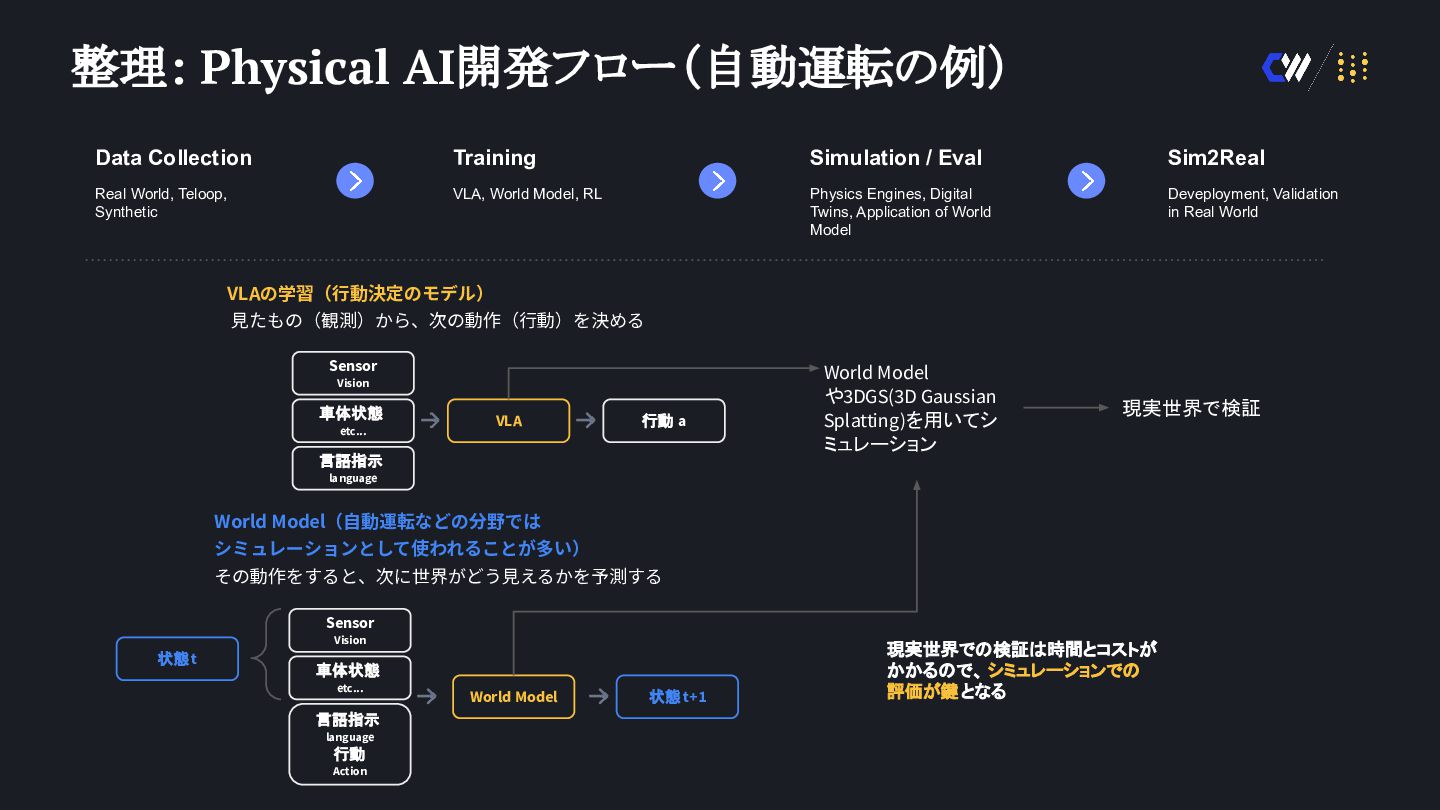
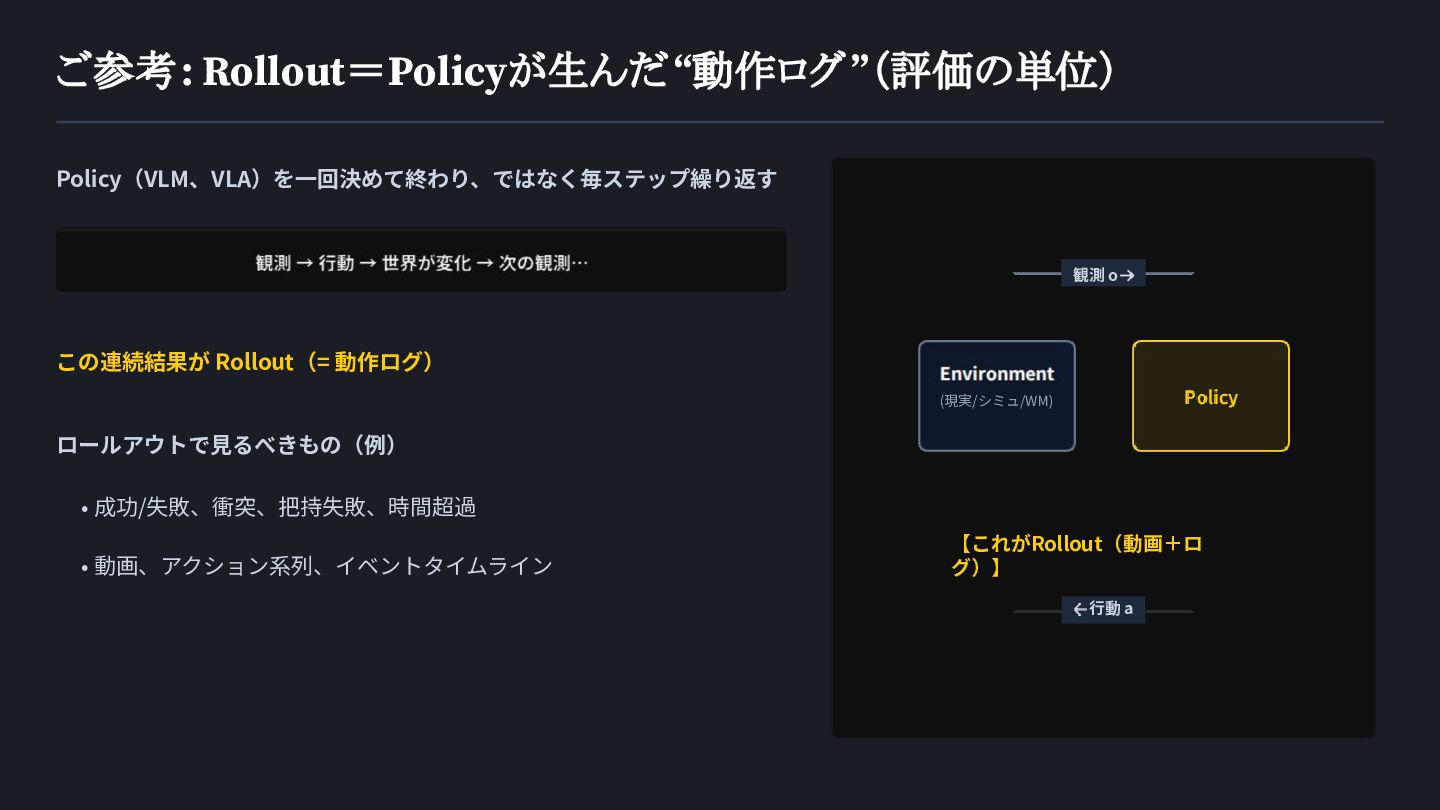
Digital Twins, Application of World Model Data Collection Real World, Teloop, Synthetic Sim2Real Deveployment, Validation in Real World 整理: Physical AI開発フロー(自動運転の例) World Model(⾃動運転などの分野では シミュレーションとして使われることが多い) その動作をすると、次に世界がどう⾒えるかを予測する VLAの学習(⾏動決定のモデル) ⾒たもの(観測)から、次の動作(⾏動)を決める Sensor Vision 言語指示 language VLA 行動 a 車体状態 etc... World Model 状態t+1 Sensor Vision 言語指示 language 行動 Action 車体状態 etc... 状態t World Model や3DGS(3D Gaussian Splatting)を用いてシ ミュレーション 現実世界で検証 現実世界での検証は時間とコストが かかるので、 シミュレーションでの 評価が鍵となる
ルなど)だけを組織で共有 • タグ付けなどをトリガーにCI/CDを起動させ、 検証や本番環境へのデプロイも可能 • 組織内での細かい権限管理により、共同開 発におけるガバナンスも担保 (成果物) Run ID (評価へ) Model ver (合格) Eval report Registry ver (候補) (回帰/安全) (本番)
{kind=link}
![2 Keisuke Kamata @olachinkei [email protected] W&Bに関して ご不明点ありましたら ご連絡ください!](https://files.speakerdeck.com/presentations/83d39738a0bf40188b43d003ec463d2d/slide_1.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}