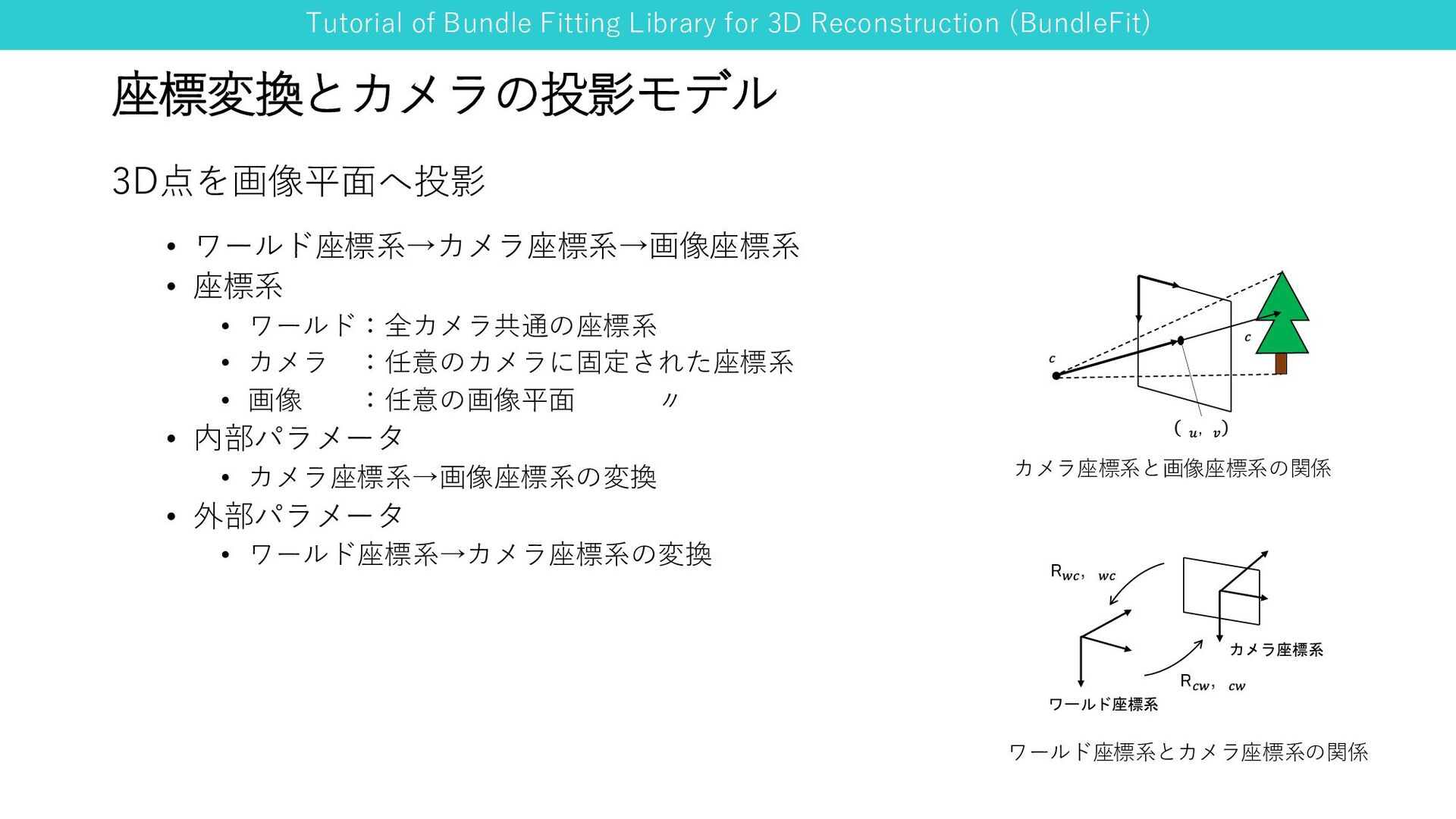
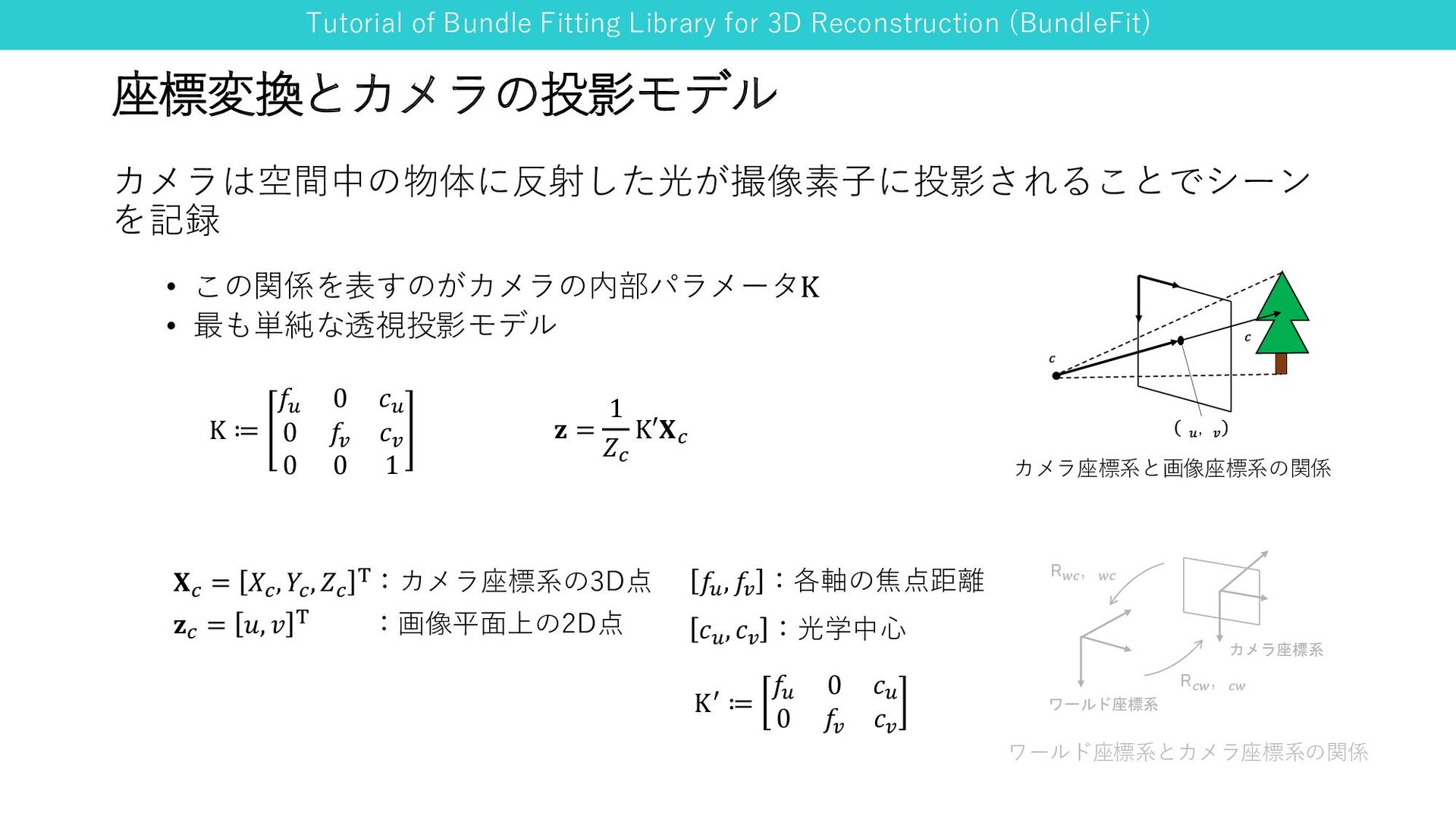
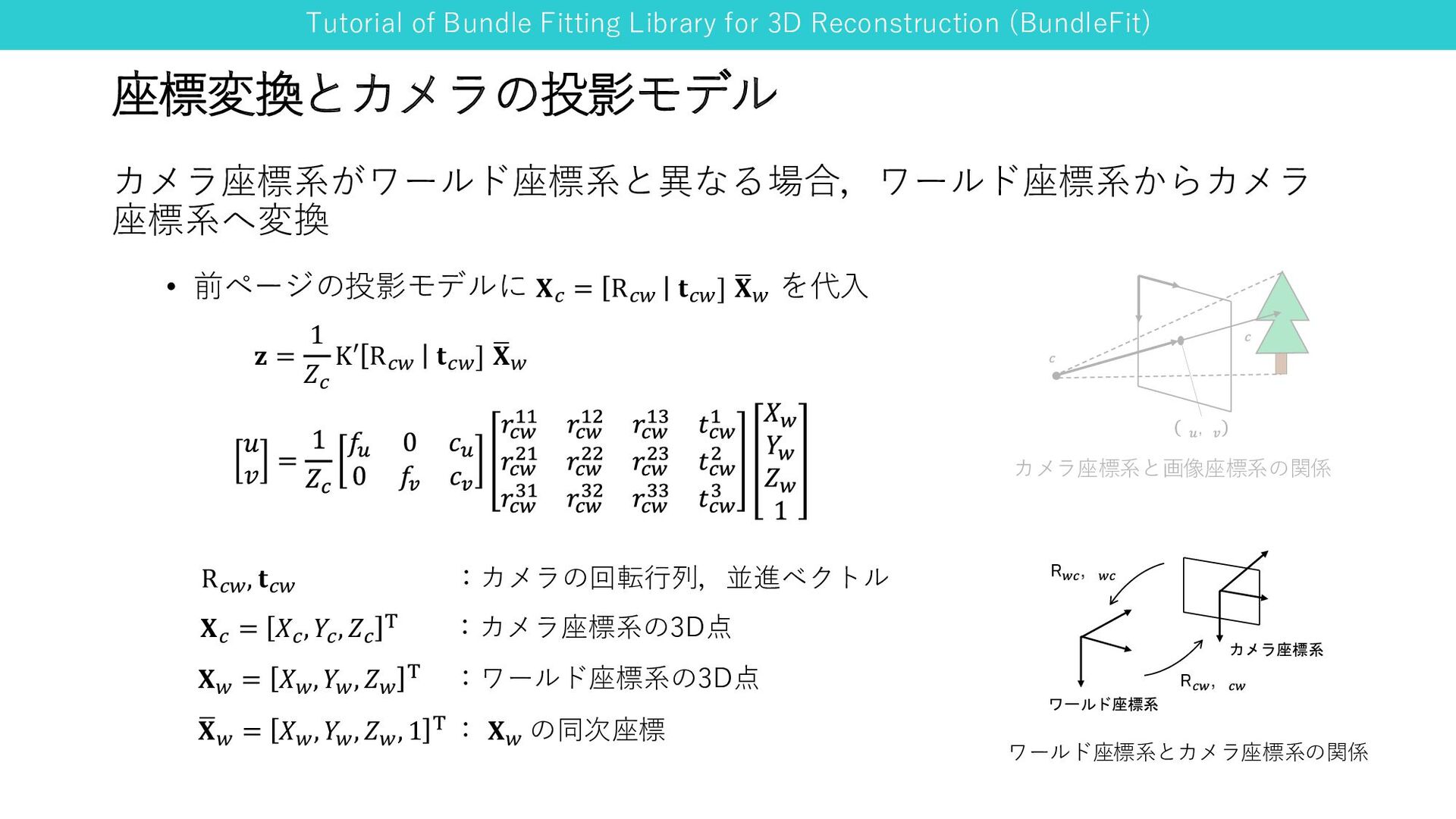
カメラ座標系がワールド座標系と異なる場合,ワールド座標系からカメラ 座標系へ変換 • 前ページの投影モデルに 𝐗𝑐 = R𝑐𝑤 𝐭𝑐𝑤 ] ഥ 𝐗𝑤 を代入 , ワールド座標系 カメラ座標系 R , R , , ワールド R , カメラ座標系と画像座標系の関係 ワールド座標系とカメラ座標系の関係 𝐳 = 1 𝑍𝑐 K′ R𝑐𝑤 𝐭𝑐𝑤 ] ഥ 𝐗𝑤 𝑢 𝑣 = 1 𝑍𝑐 𝑓𝑢 0 𝑐𝑢 0 𝑓𝑣 𝑐𝑣 𝑟𝑐𝑤 11 𝑟𝑐𝑤 12 𝑟𝑐𝑤 13 𝑡𝑐𝑤 1 𝑟𝑐𝑤 21 𝑟𝑐𝑤 22 𝑟𝑐𝑤 23 𝑡𝑐𝑤 2 𝑟𝑐𝑤 31 𝑟𝑐𝑤 32 𝑟𝑐𝑤 33 𝑡𝑐𝑤 3 𝑋𝑤 𝑌𝑤 𝑍𝑤 1 𝐗𝑐 = 𝑋𝑐 , 𝑌𝑐 , 𝑍𝑐 T :カメラ座標系の3D点 𝐗𝑤 = 𝑋𝑤 , 𝑌𝑤 , 𝑍𝑤 T :ワールド座標系の3D点 R𝑐𝑤 , 𝐭𝑐𝑤 :カメラの回転行列,並進ベクトル ഥ 𝐗𝑤 = 𝑋𝑤 , 𝑌𝑤 , 𝑍𝑤 , 1 T : 𝐗𝑤 の同次座標
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}