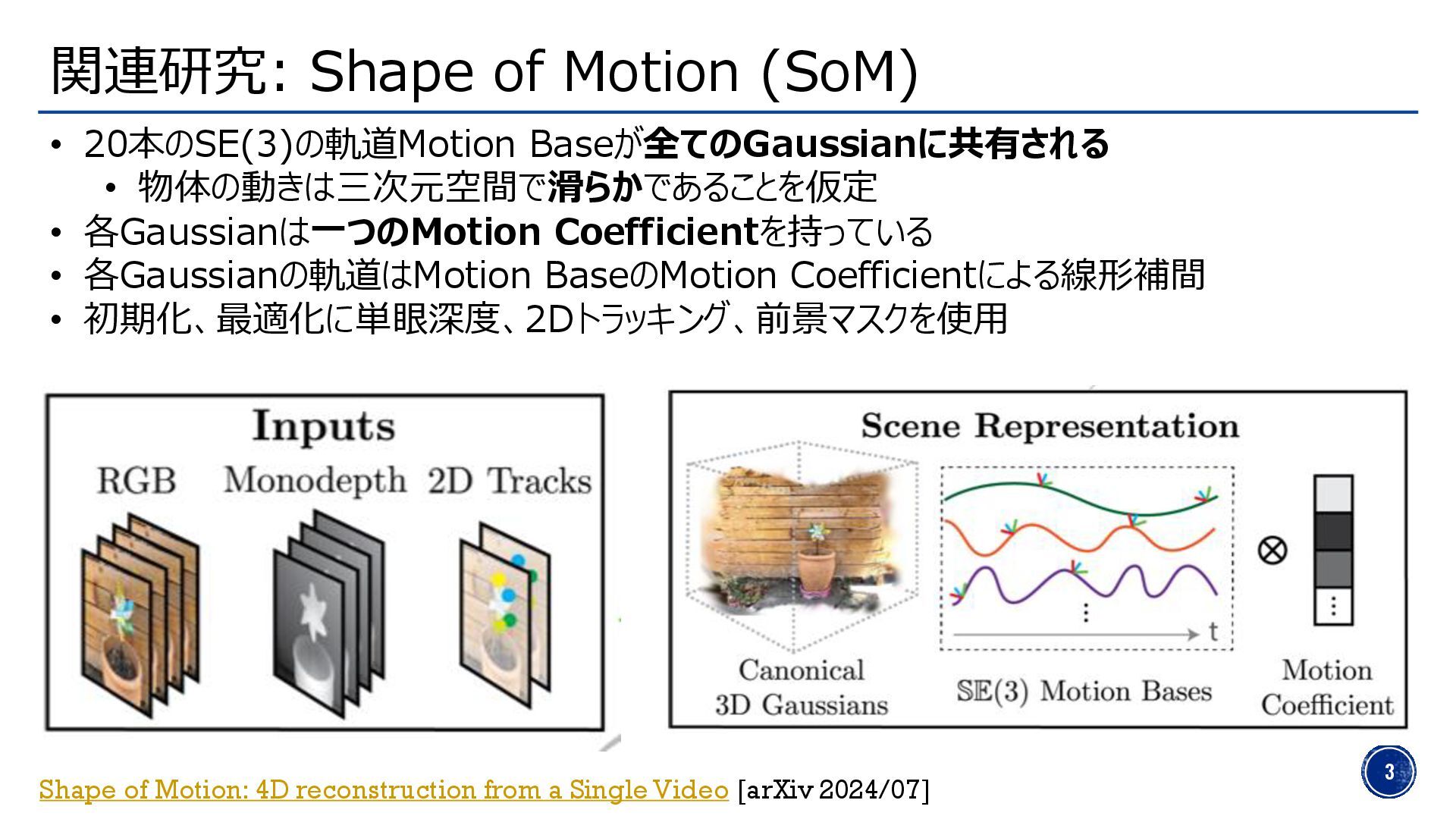
物体の動きは三次元空間で滑らかであることを仮定 • 各Gaussianは一つのMotion Coefficientを持っている • 各Gaussianの軌道はMotion BaseのMotion Coefficientによる線形補間 • 初期化、最適化に単眼深度、2Dトラッキング、前景マスクを使用 Shape of Motion: 4D reconstruction from a Single Video [arXiv 2024/07]
Map, St4RTrack • すべての時刻に対して点群を出力することを4D再構築と言えるか? • Video Diffusion? • Novel view synthesisだけならVideo Diffusionの方がいいかも • 4D再構築の応用先? Continuous 3D Perception Model with Persistent State [CVPR 2025] Dynamic Point Maps: A Versatile Representation for Dynamic 3D Reconstruction [arXiv 2025/03] St4RTrack: Simultaneous 4D Reconstruction and Tracking in the World [arXiv 2025/04]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
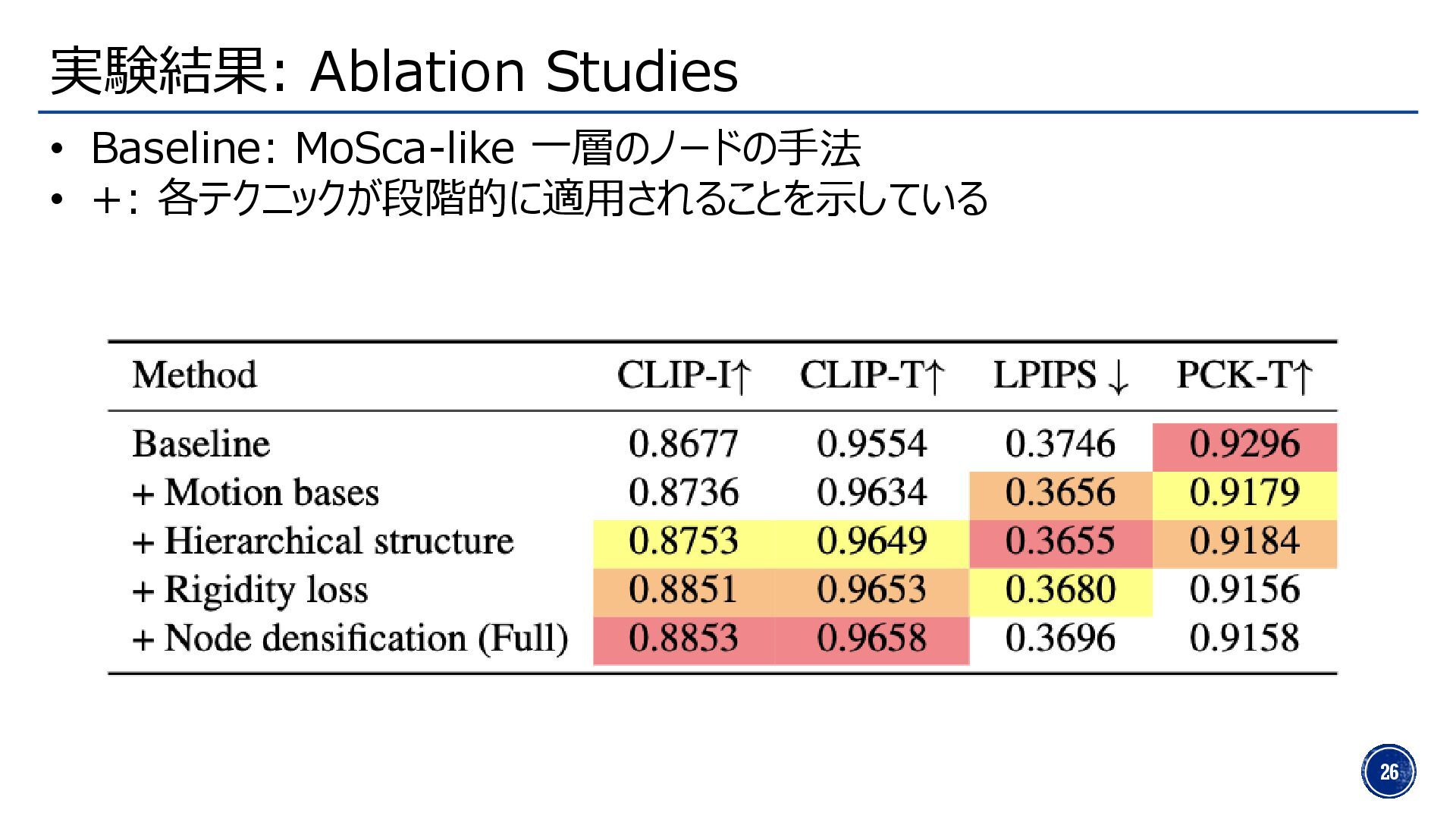
![実験結果: Ablation Studies 28 • [a, b] • a: 一層目のMotion](https://files.speakerdeck.com/presentations/5ccbccdc6b6647b1b68b3363a7bd127c/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}