Zador Pataki, Paul-Edouard Sarlin, Johannes L. Schonberger, Marc Pollefeys 所属: ETH Zurich, Google, Microsoft Spatial AI Lab コード公開: github.com/cvg/mpsfm 2025/05/20 李 淳⾬
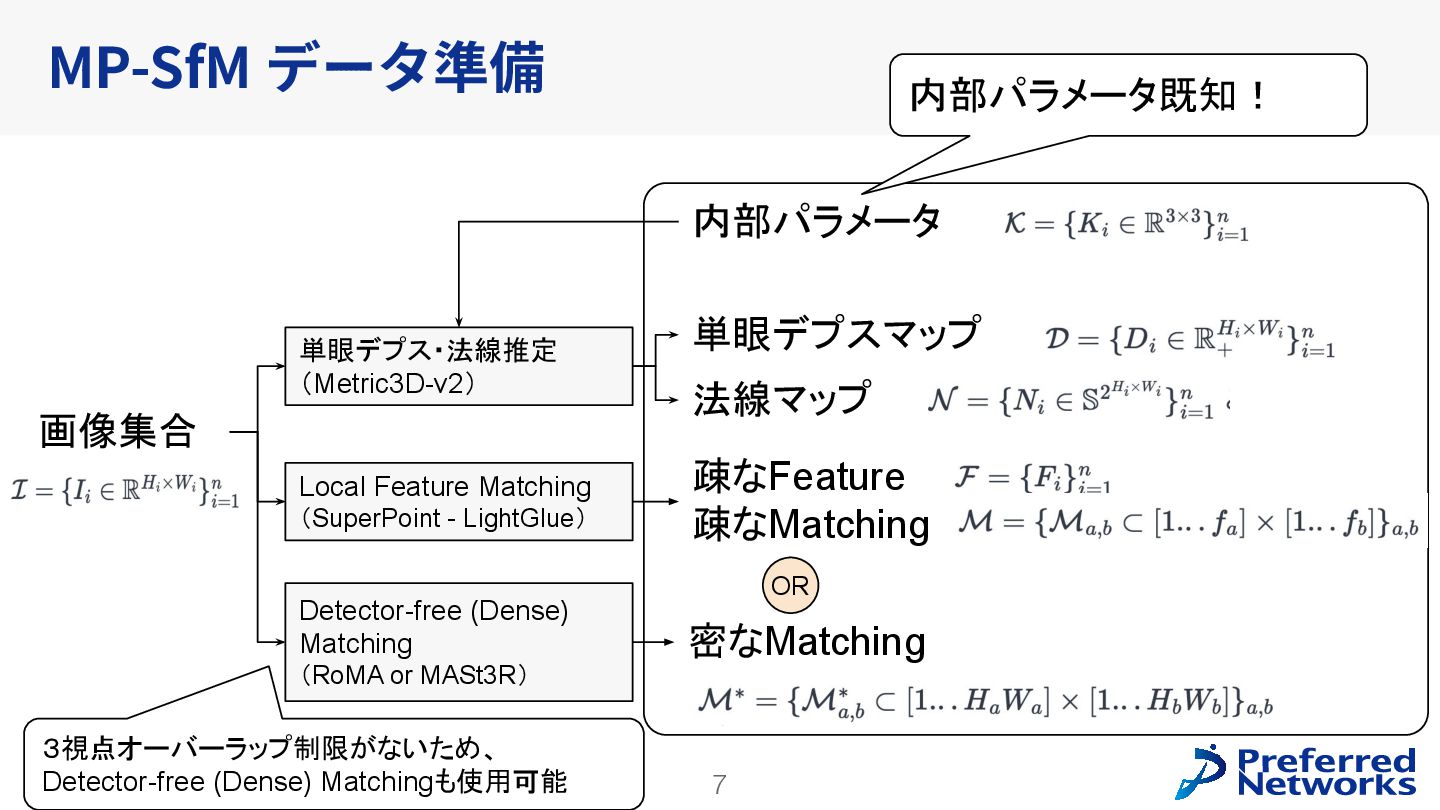
Geometric Foundation Model for Zero-Shot Metric Depth and Surface Normal Estimation. IEEE TPAMI, 2024 Local Feature Matching • [SuperPoint] SuperPoint: Self-Supervised Interest Point Detection and Description. In CVPR Workshops, 2018 • [LightGlue] 3D Gaussian Splatting for Real-Time Radiance Field Rendering. TOG, 2023 Detector-free (Dense) Matching • [RoMa] RoMa: Robust Dense Feature Matching. CVPR, 2024 • [MASt3R] Grounding Image Matching in 3D with MASt3R. In ECCV, 2024
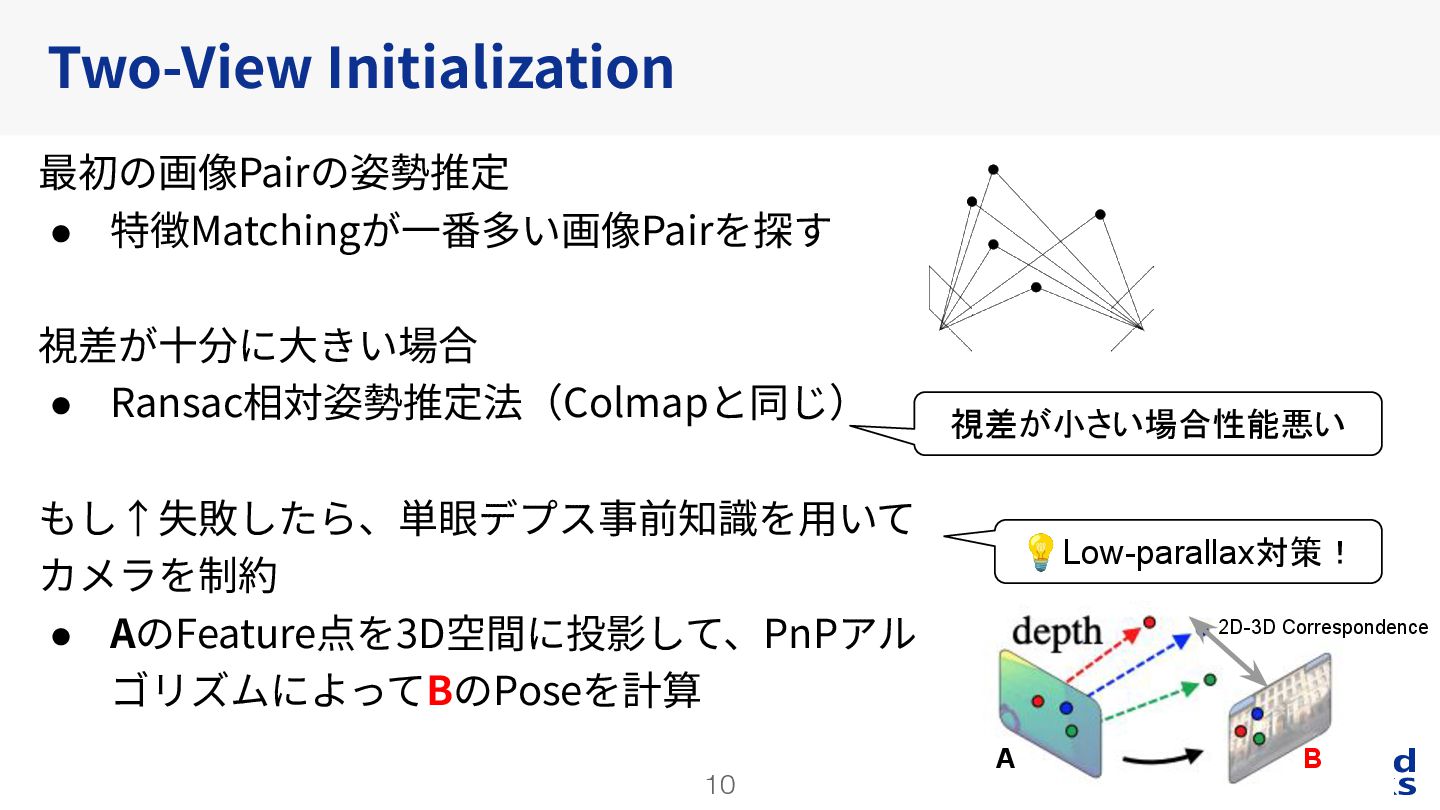
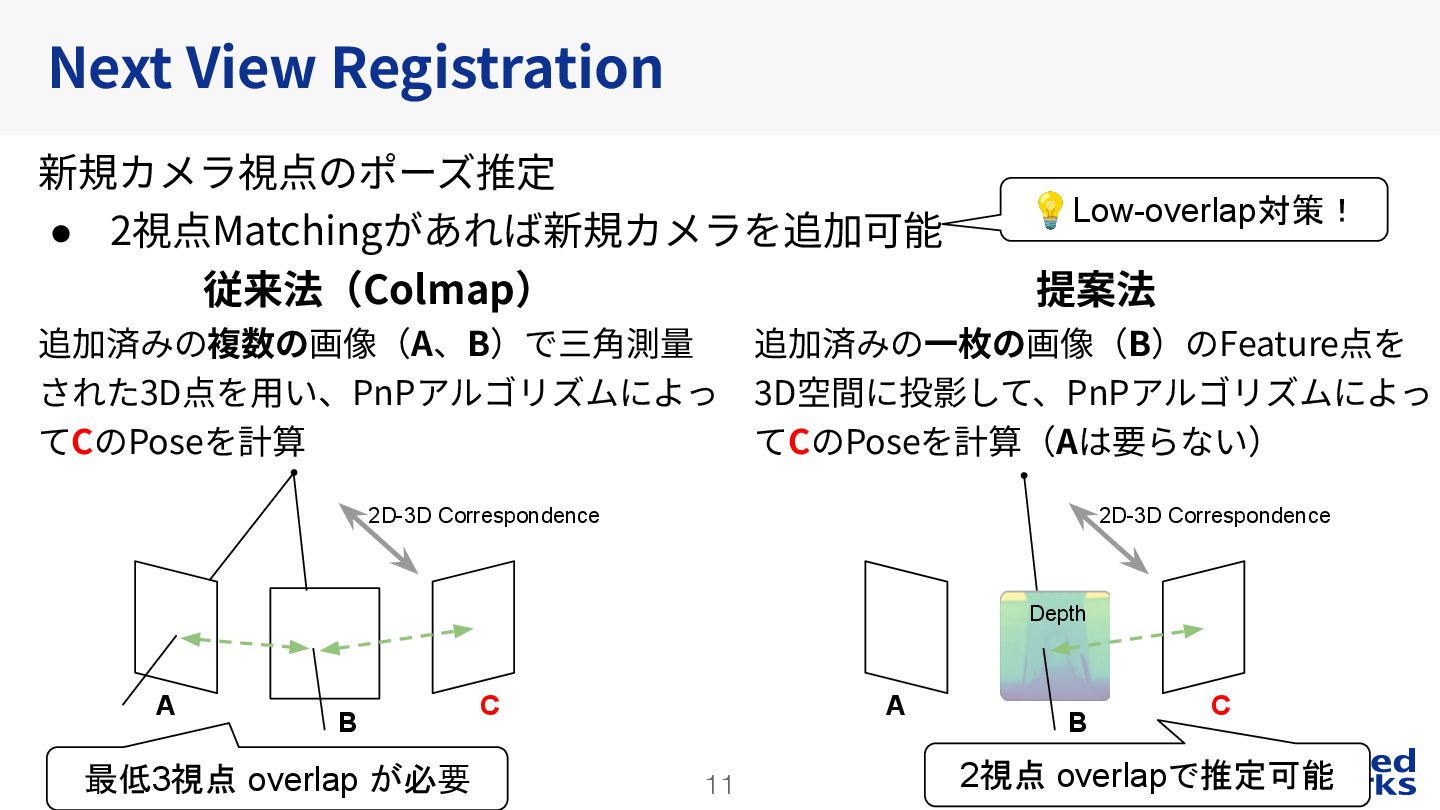
View Registration A B C 2D-3D Correspondence A B C 2D-3D Correspondence Depth 新規カメラ視点のポーズ推定 • 2視点Matchingがあれば新規カメラを追加可能 💡Low-overlap対策! 最低3視点 overlap が必要 2視点 overlapで推定可能
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![8 MP-SfM データ準備 単眼デプス‧法線推定 • [Metric3D-v2] Metric3D-v2: A Versatile Monocular](https://files.speakerdeck.com/presentations/b504cce5f9eb4e9c8a53812324c9cbdf/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}