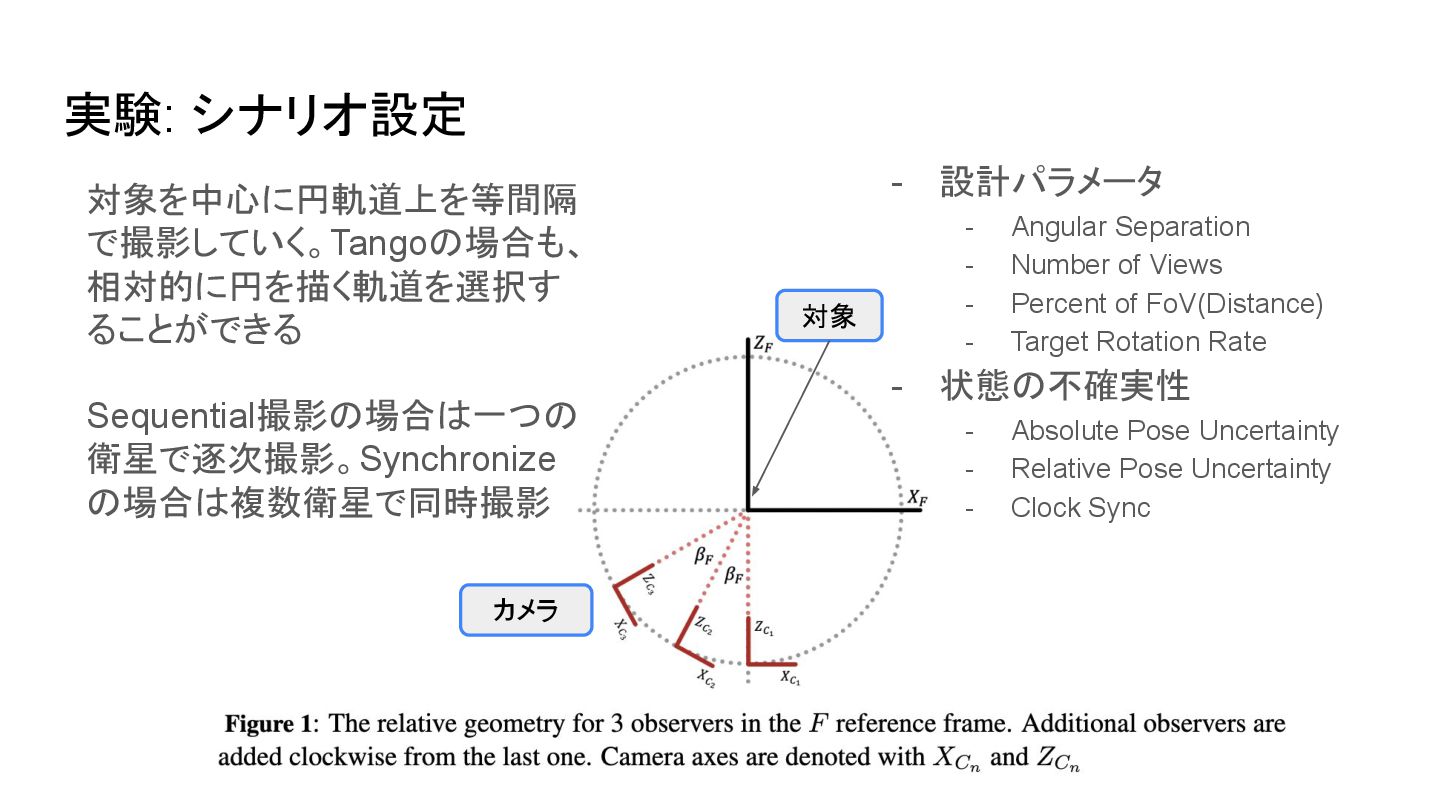
Number of Views - Percent of FoV(Distance) - Target Rotation Rate - 状態の不確実性 - Absolute Pose Uncertainty - Relative Pose Uncertainty - Clock Sync 対象を中心に円軌道上を等間隔 で撮影していく。Tangoの場合も、 相対的に円を描く軌道を選択す ることができる Sequential撮影の場合は一つの 衛星で逐次撮影。Synchronize の場合は複数衛星で同時撮影
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}