Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
物体追跡
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
Masafumi Abeta
January 24, 2022
Science
360
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
物体追跡
社内勉強会で発表した資料です。
Masafumi Abeta
January 24, 2022
More Decks by Masafumi Abeta
See All by Masafumi Abeta
Pythonのパッケージマネージャー「uv」
abeta
1
450
GPTモデルでキャラクター設定する際の課題
abeta
0
390
GPTをLINEで使えるようにして布教した
abeta
0
220
【Nishika】プリント基板の電子部品検出
abeta
0
360
初心者向けChatGPT入門
abeta
0
290
GPT Short Talk
abeta
0
170
拡散モデルについて少しだけ
abeta
0
96
動的計画モデル
abeta
0
210
特徴量記述
abeta
0
220
Other Decks in Science
See All in Science
20251212_LT忘年会_データサイエンス枠_新川.pdf
shinpsan
0
300
データベース10: 拡張実体関連モデル
trycycle
PRO
0
1.3k
データベース12: 正規化(2/2) - データ従属性に基づく正規化
trycycle
PRO
0
1.4k
フィードフォワードニューラルネットワークを用いた記号入出力制御系に対する制御器設計 / Controller Design for Augmented Systems with Symbolic Inputs and Outputs Using Feedforward Neural Network
konakalab
0
160
データベース09: 実体関連モデル上の一貫性制約
trycycle
PRO
0
1.5k
ssmonline #51 ヤマサキ春のサメ祭り 2026 / ssmjp Yamasaki Spring JAWS Festival 2026
naospon
1
100
HajimetenoLT vol.17
hashimoto_kei
1
250
Endel Tulvingとエピソード記憶
rmaruy
0
150
機械学習 - DBSCAN
trycycle
PRO
0
1.9k
チュートリアル:世界モデル
hf149
0
1.9k
(CVPR2026) Back to Basics: Let Denoising Generative Models Denoise
shumpei777
0
220
20260220 OpenIDファウンデーション・ジャパン ご紹介 / 20260220 OpenID Foundation Japan Intro
oidfj
0
380
Featured
See All Featured
CoffeeScript is Beautiful & I Never Want to Write Plain JavaScript Again
sstephenson
162
16k
Digital Ethics as a Driver of Design Innovation
axbom
PRO
1
350
How to Align SEO within the Product Triangle To Get Buy-In & Support - #RIMC
aleyda
2
1.7k
DevOps and Value Stream Thinking: Enabling flow, efficiency and business value
helenjbeal
1
260
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
10k
Tell your own story through comics
letsgokoyo
1
1k
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
620
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
590
Product Roadmaps are Hard
iamctodd
55
12k
Fight the Zombie Pattern Library - RWD Summit 2016
marcelosomers
234
17k
Redefining SEO in the New Era of Traffic Generation
szymonslowik
1
360
Git: the NoSQL Database
bkeepers
PRO
432
67k
Transcript
XX University 物体追跡 2022.01.24 Abeta
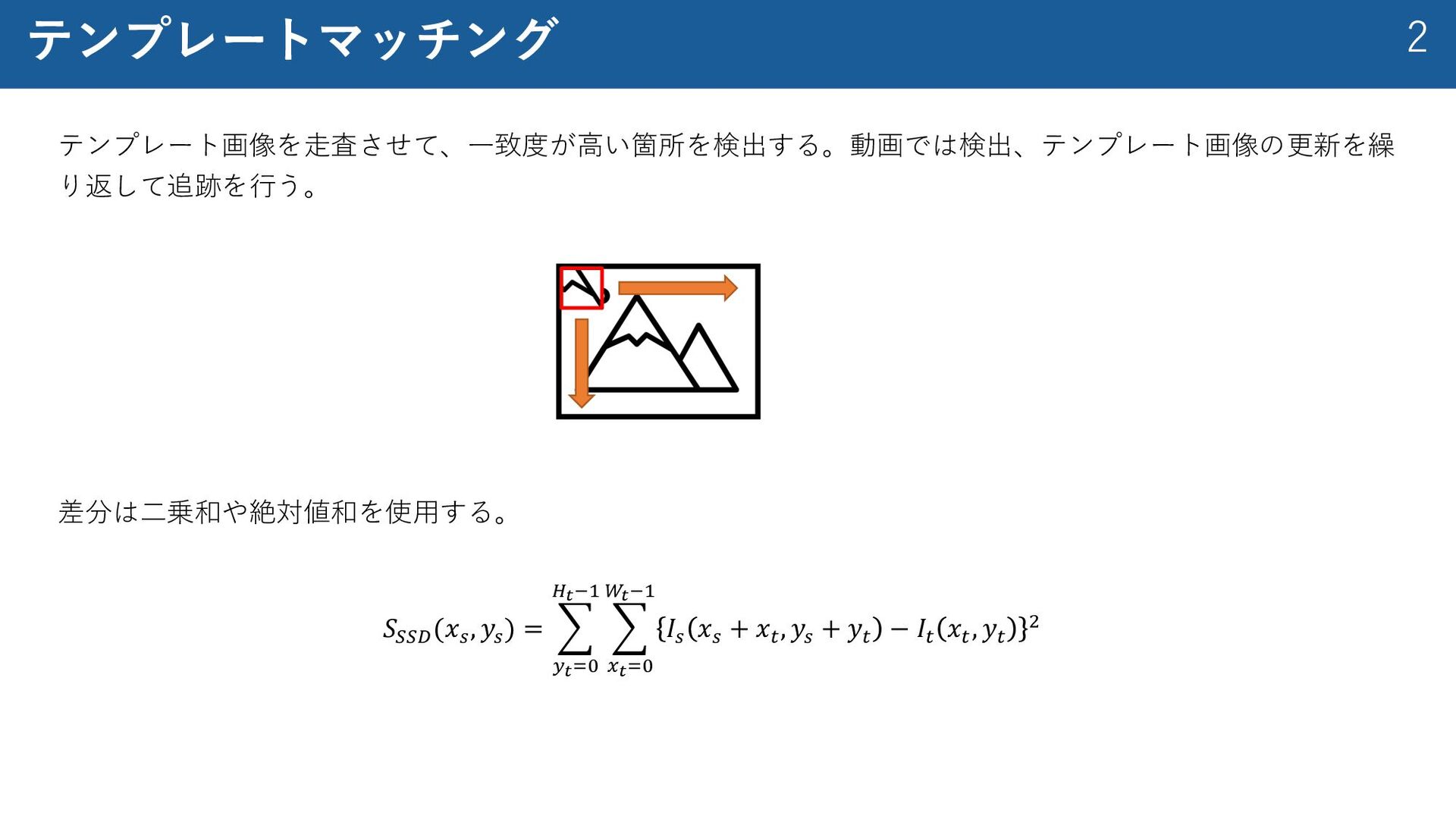
2 テンプレートマッチング テンプレート画像を⾛査させて、⼀致度が⾼い箇所を検出する。動画では検出、テンプレート画像の更新を繰 り返して追跡を⾏う。 𝑆!!" (𝑥# , 𝑦# ) =
( $!%& '!() ( *!%& +!() 𝐼# 𝑥# + 𝑥, , 𝑦# + 𝑦, − 𝐼, 𝑥, , 𝑦, - 差分は⼆乗和や絶対値和を使⽤する。
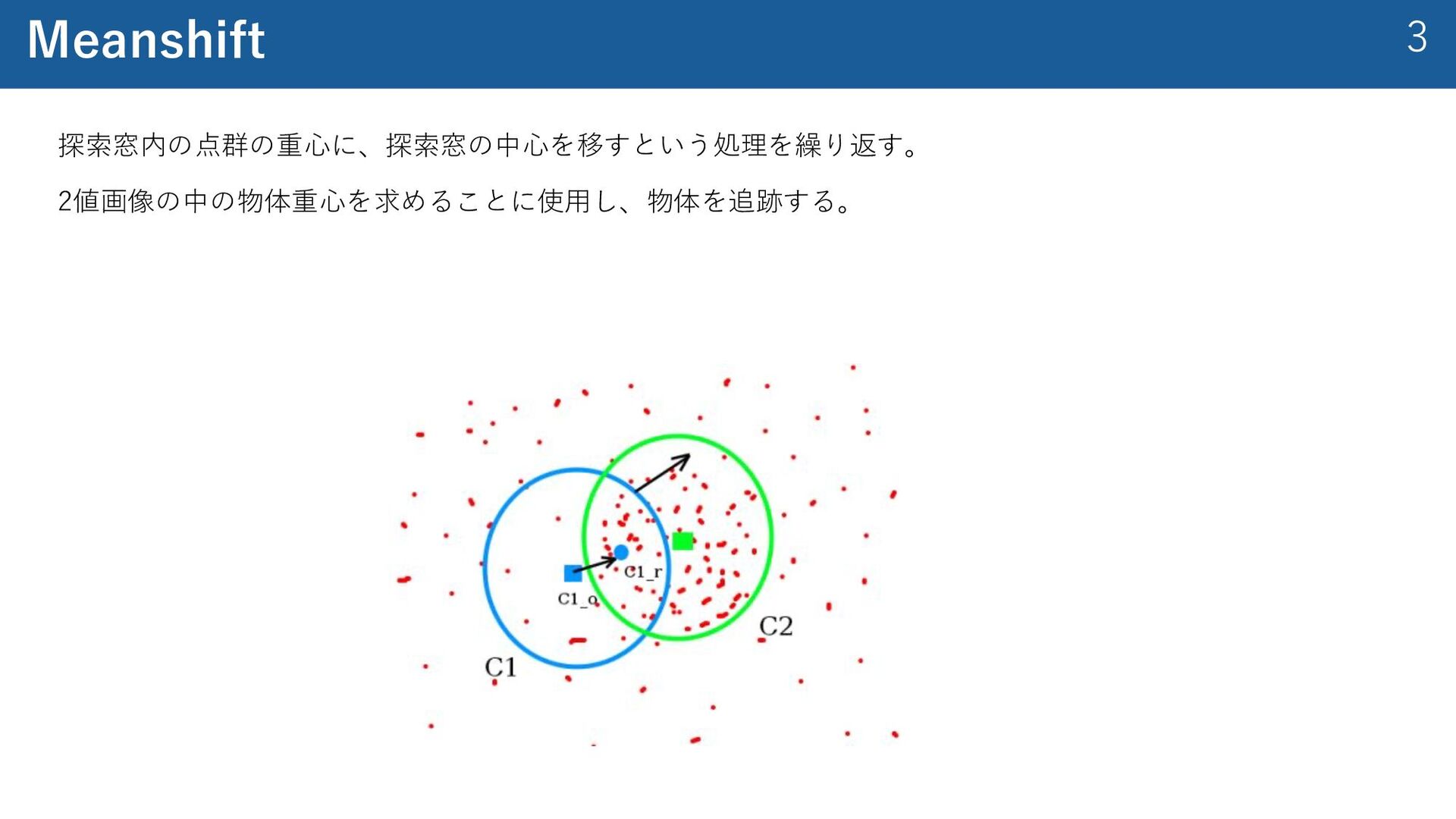
3 Meanshift 探索窓内の点群の重⼼に、探索窓の中⼼を移すという処理を繰り返す。 2値画像の中の物体重⼼を求めることに使⽤し、物体を追跡する。
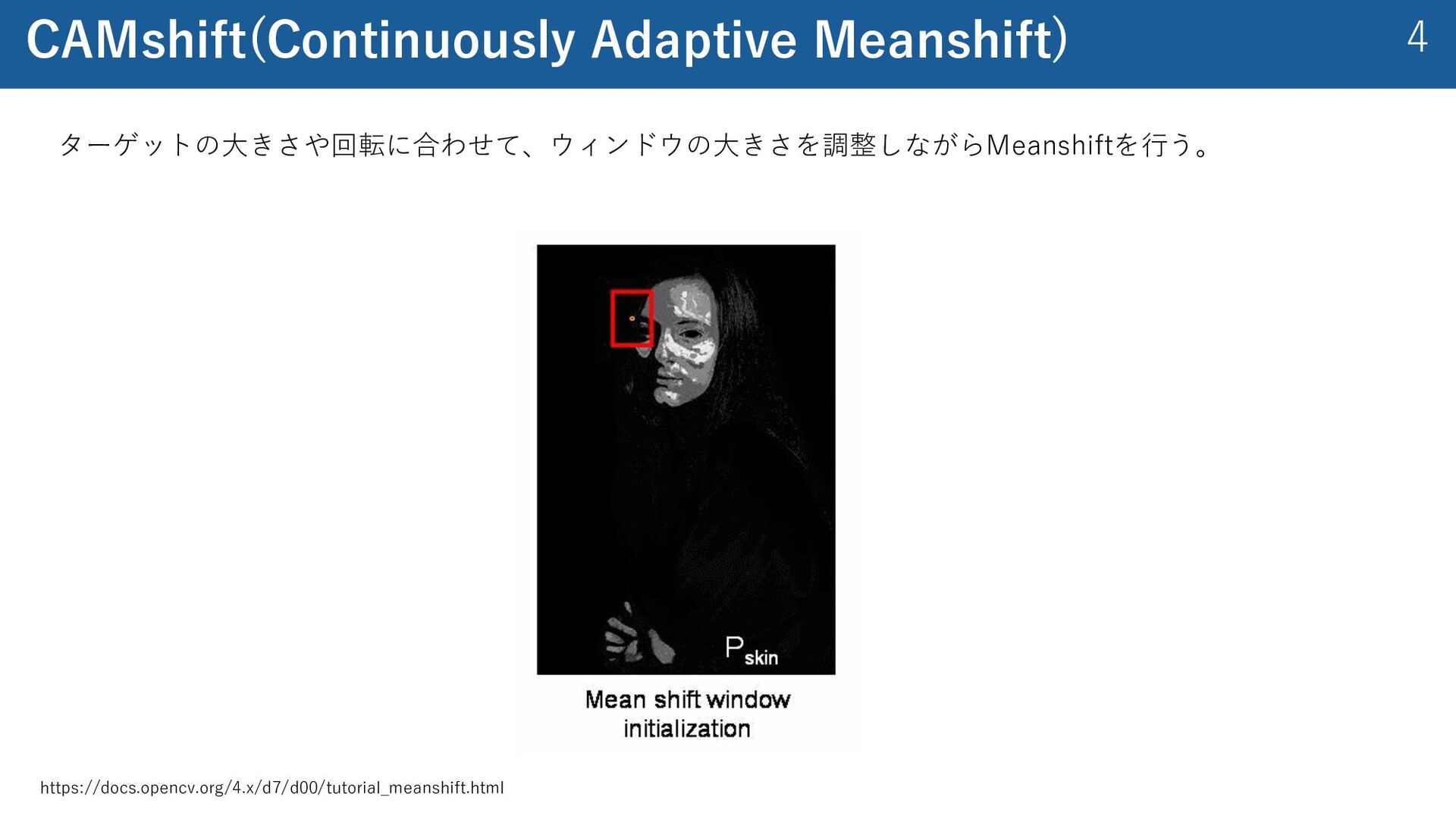
4 CAMshift(Continuously Adaptive Meanshift) ターゲットの⼤きさや回転に合わせて、ウィンドウの⼤きさを調整しながらMeanshiftを⾏う。 https://docs.opencv.org/4.x/d7/d00/tutorial_meanshift.html
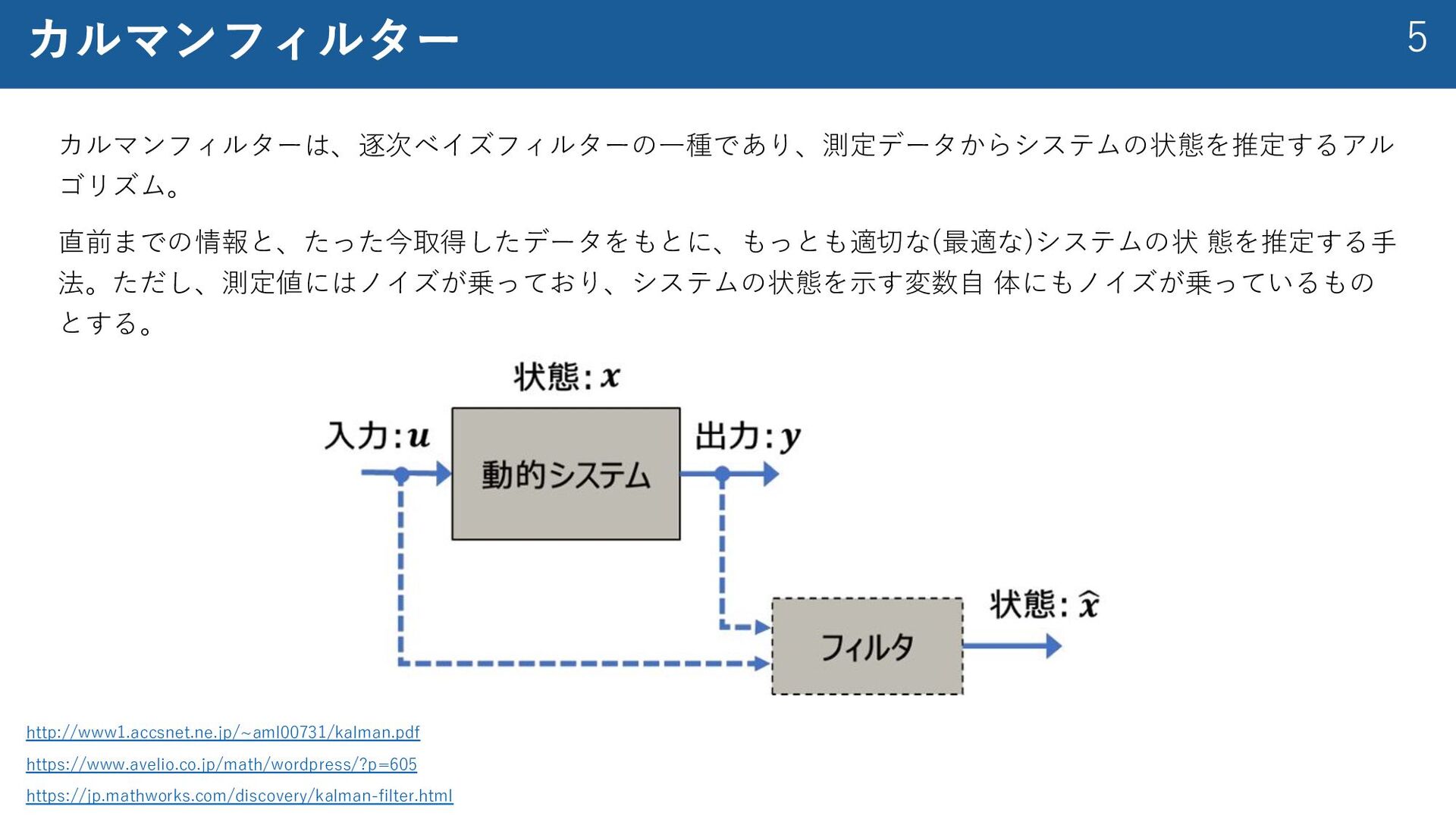
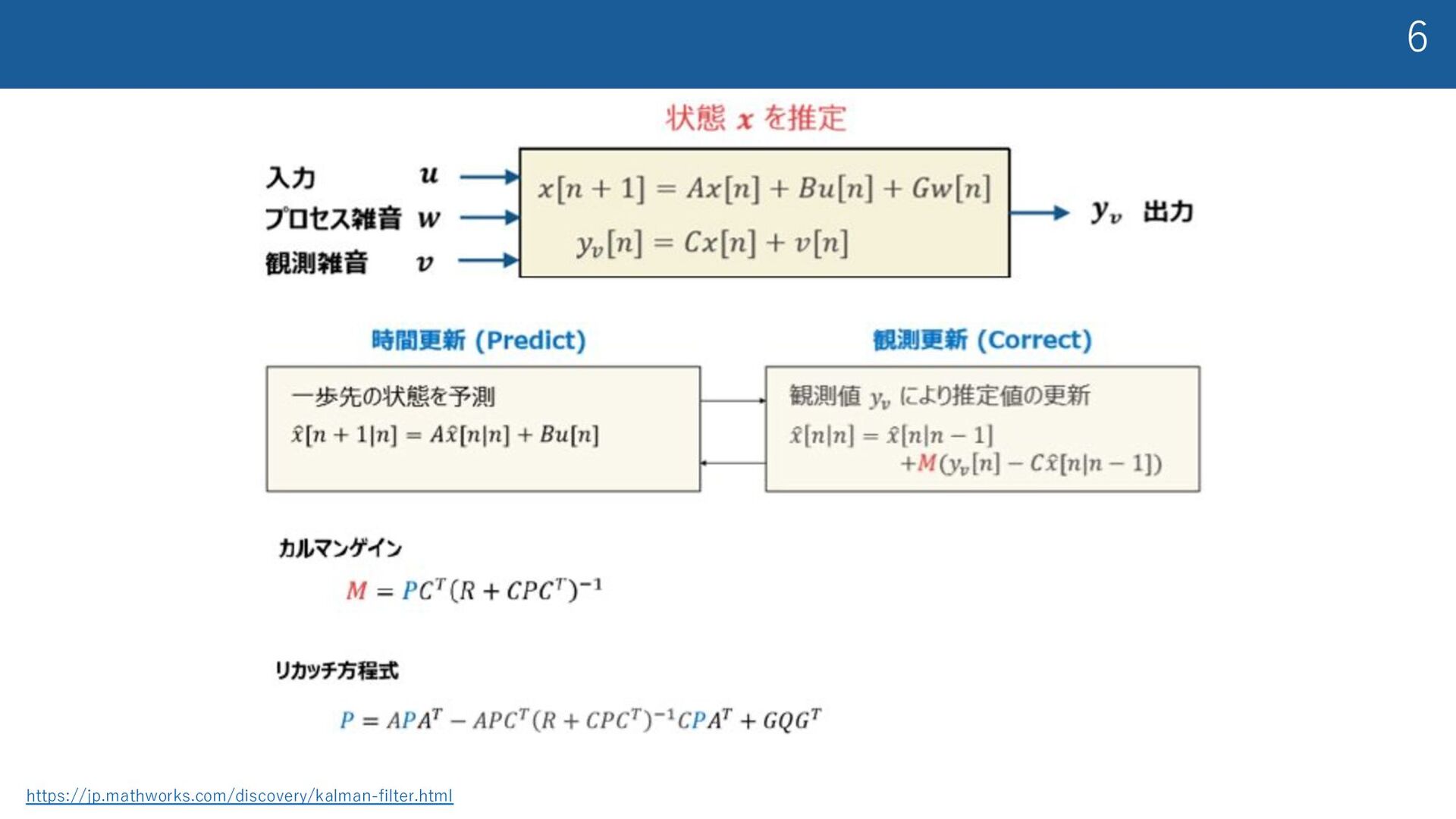
5 カルマンフィルター カルマンフィルターは、逐次ベイズフィルターの⼀種であり、測定データからシステムの状態を推定するアル ゴリズム。 直前までの情報と、たった今取得したデータをもとに、もっとも適切な(最適な)システムの状 態を推定する⼿ 法。ただし、測定値にはノイズが乗っており、システムの状態を⽰す変数⾃ 体にもノイズが乗っているもの とする。 https://jp.mathworks.com/discovery/kalman-filter.html
https://www.avelio.co.jp/math/wordpress/?p=605 http://www1.accsnet.ne.jp/~aml00731/kalman.pdf
6 https://jp.mathworks.com/discovery/kalman-filter.html
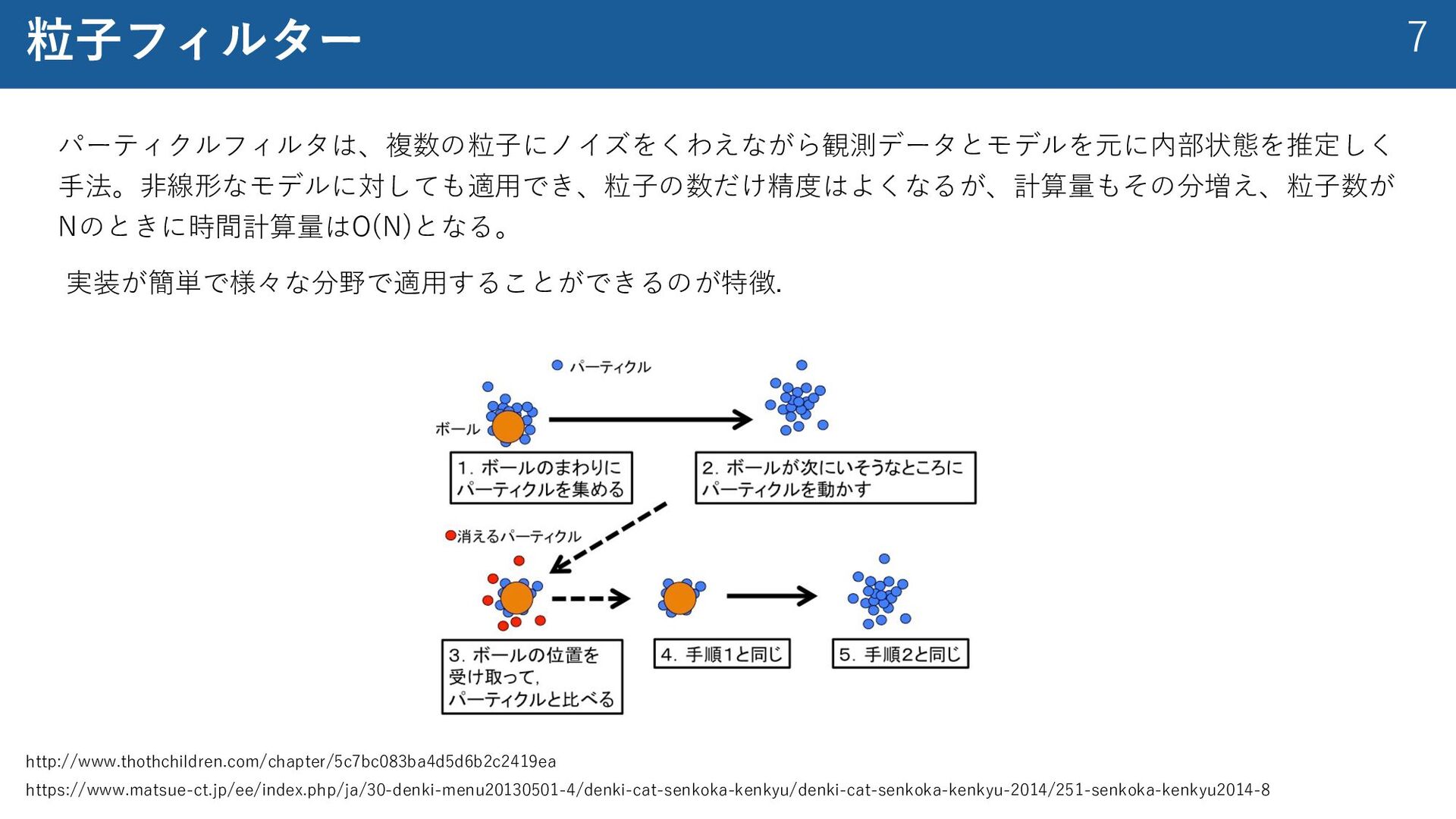
7 粒⼦フィルター パーティクルフィルタは、複数の粒⼦にノイズをくわえながら観測データとモデルを元に内部状態を推定しく ⼿法。⾮線形なモデルに対しても適⽤でき、粒⼦の数だけ精度はよくなるが、計算量もその分増え、粒⼦数が Nのときに時間計算量はO(N)となる。 実装が簡単で様々な分野で適⽤することができるのが特徴. https://www.matsue-ct.jp/ee/index.php/ja/30-denki-menu20130501-4/denki-cat-senkoka-kenkyu/denki-cat-senkoka-kenkyu-2014/251-senkoka-kenkyu2014-8 http://www.thothchildren.com/chapter/5c7bc083ba4d5d6b2c2419ea
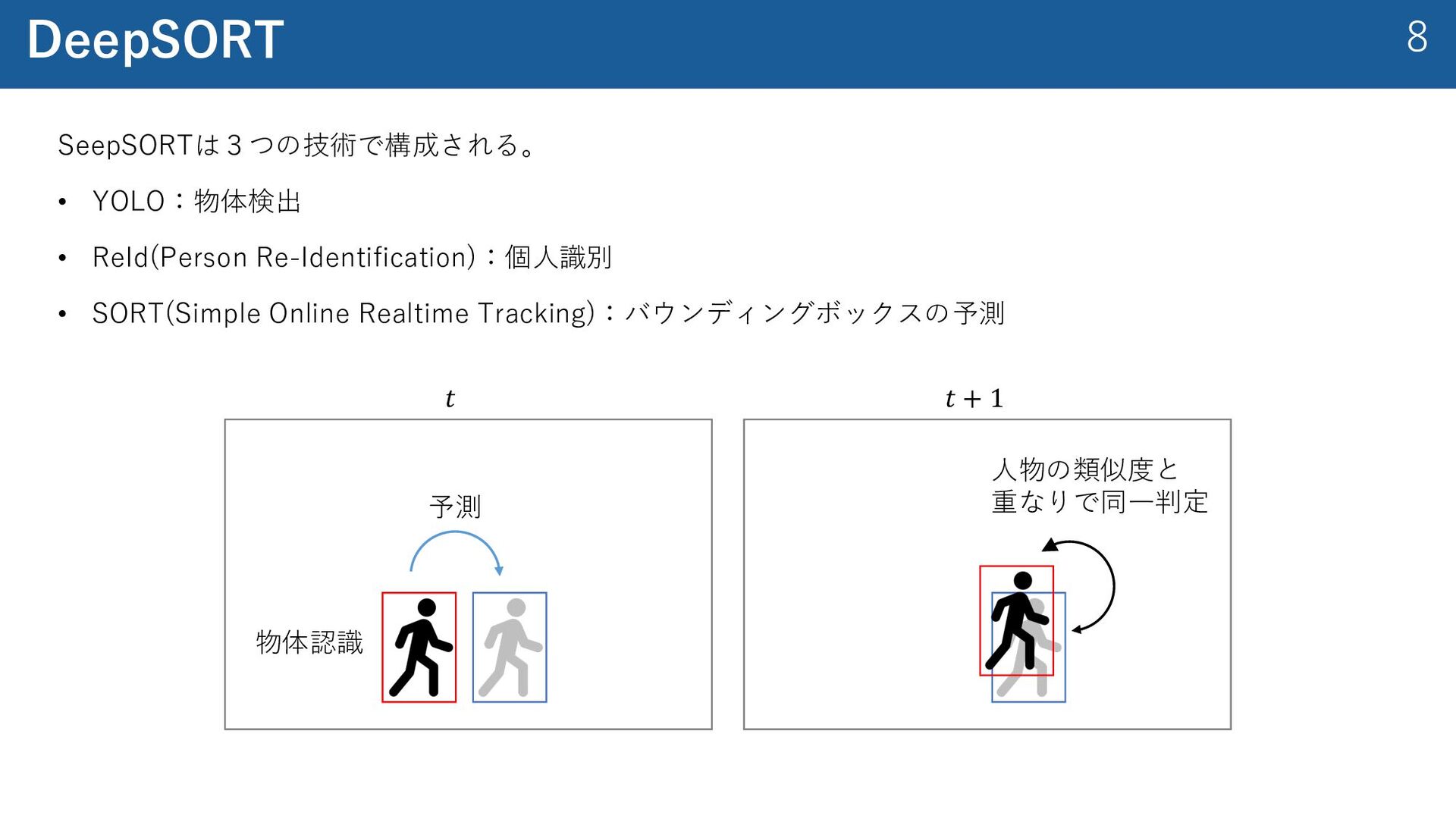
8 DeepSORT SeepSORTは3つの技術で構成される。 • YOLO:物体検出 • ReId(Person Re-Identification):個⼈識別 • SORT(Simple
Online Realtime Tracking):バウンディングボックスの予測 予測 𝑡 𝑡 + 1 物体認識 ⼈物の類似度と 重なりで同⼀判定
9 参考⽂献 • 中村恭之, ⼩枝正直, 上⽥悦⼦, 『OpenCVによるコンピュータビジョン・機械学習⼊⾨』, 講談社, 2017
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}