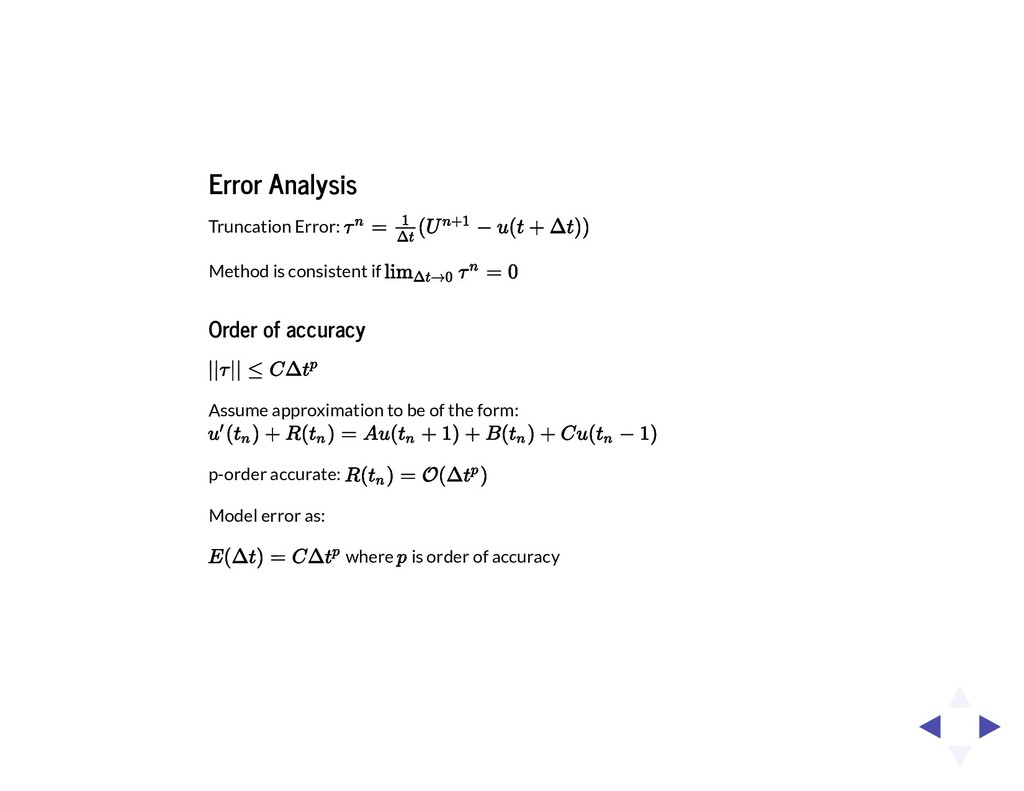
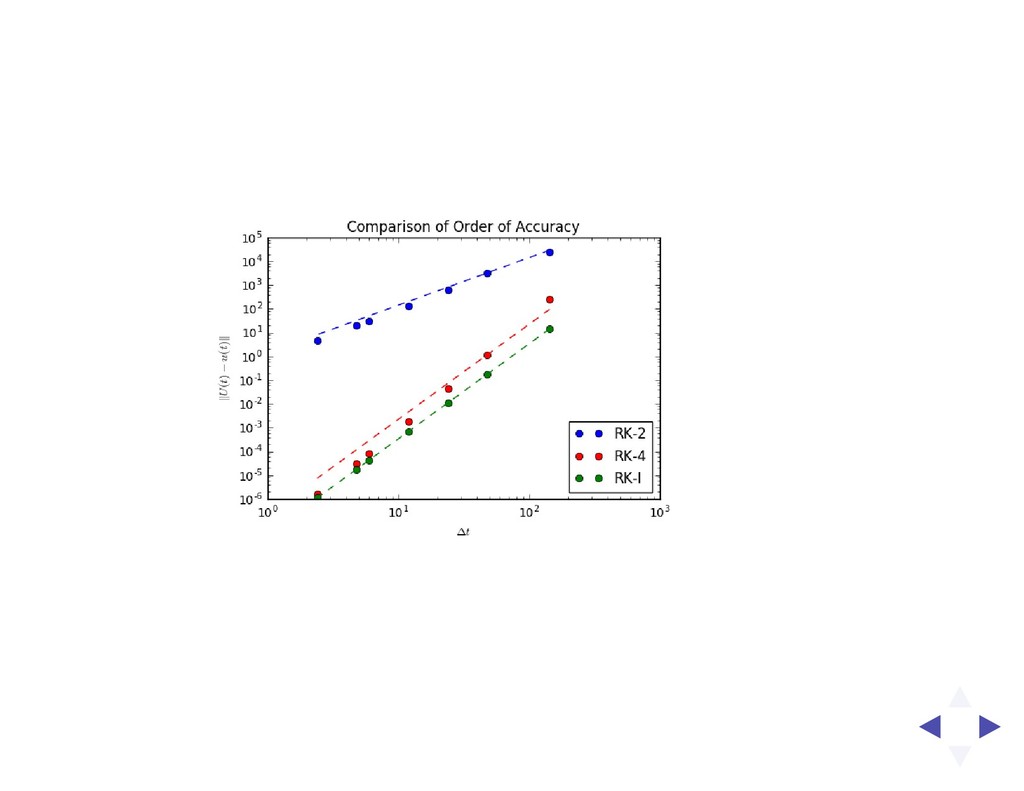
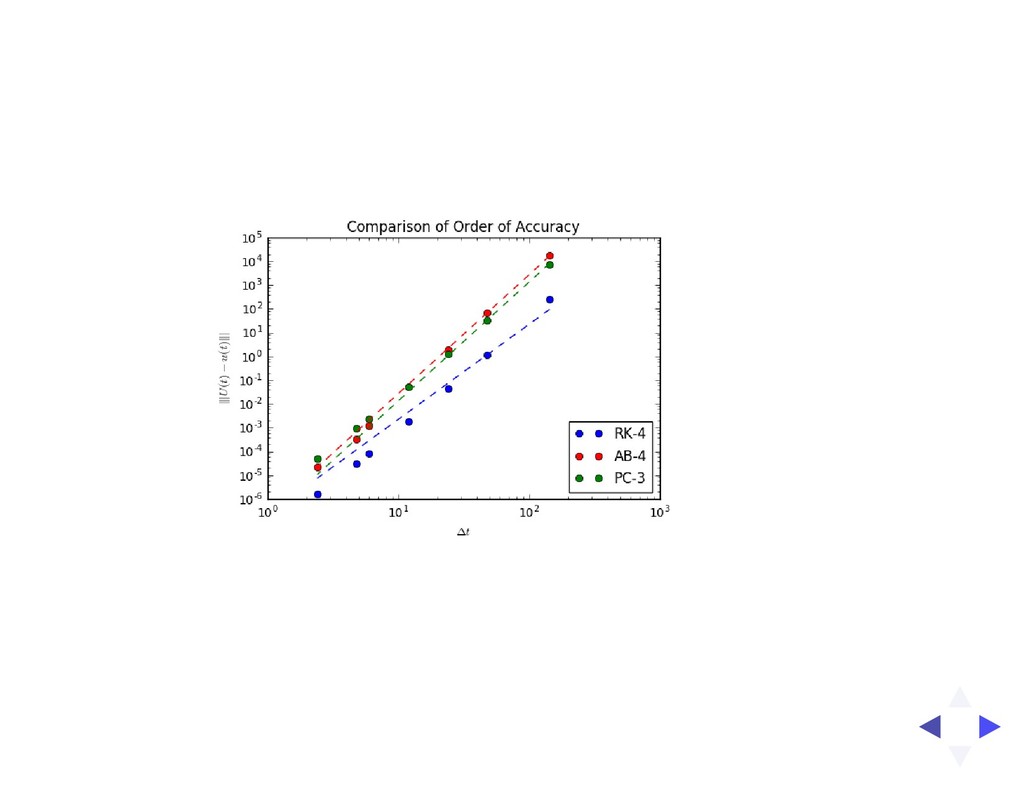
# In general, we expect error to behave as this C = lambda delta_x, error, order: error / delta_x**order # Use RHS for 2-body problem f = rhs_two_body # Initial conditions r = [5492.000, 3984.001, 2.955] v = [-3.931, 5.498, 3.665] # Gravitational constant for Earth mu = 398600.4415 # Final time for simulation t_f = 86400 # From coarser to finer grid steps = [600, 1800, 3600, 7200, 14400, 18000, 36000] # Calculate errors for distance vector; we want quantities to be # comparable. Use matrix norm with ord=1 (max sum along axis 0) error_rk2[i] = numpy.linalg.norm((U_RK2[0:3, :] - U[0:3, :]), ord=1) # Plot expected order of accuracy axes.loglog(delta_t, C(delta_t[1], error_rk2[1], 2.0) * delta_t**2.0, '--b') axes.loglog(delta_t, C(delta_t[1], error_rk4[1], 4.0) * delta_t**4.0, '--r') axes.loglog(delta_t, C(delta_t[1], error_irk[1], 4.0) * delta_t**4.0, '--g')
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![In [ ]: def rhs_two_body(t, U, mu=398600.4415): """ Right-hand side](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![In [ ]: def ERK2(t, r, v, f): """ Explicit](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_12.jpg){kind=link}
{kind=link}
![In [ ]: def ERK4(t, r, v, f): """ Explicit](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_14.jpg){kind=link}
{kind=link}
![In [ ]: def IRKGL(t, r, v, f): """ Implicit](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![In [ ]: def ABM3(t, r, v, f): """ Adams-Bashforth-Moulton](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![In [ ]: """ Visualization of Order of Accuracy """](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_25.jpg){kind=link}
{kind=link}
![In [ ]: axes.loglog(delta_t, order_C(delta_t[1], error_rk[1], 4.0) * delta_t**4.0, '--b')](https://files.speakerdeck.com/presentations/9097542d174f4deda612121699406c40/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}