Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ROSConJP 2025 発表スライド
Search
ぐるぐる
September 09, 2025
Education
310
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ROSConJP 2025 発表スライド
ぐるぐる
September 09, 2025
More Decks by ぐるぐる
See All by ぐるぐる
StudioAquatan Introduction 2024
f0reacharr
0
23
StudioAquatan Introduction 2024
f0reacharr
0
56
ロボコンのすすめ
f0reacharr
0
77
How to survive campus life at KIT with MacBook
f0reacharr
0
180
テレビ録画を遠隔視聴する話
f0reacharr
0
640
Other Decks in Education
See All in Education
Visionary Initiative: Future Intelligence — Laying the foundations for the future of science, intelligence, and society | Science Tokyo
sciencetokyo
PRO
0
150
教育現場から見た Ruby on Rails
yasslab
PRO
0
220
プロポーザルを書く技術とアンチパターン/proposal-writing-and-antipatterns
moriyuya
13
3.5k
Implicit and Cross-Device Interaction - Lecture 10 - Next Generation User Interfaces (4018166FNR)
signer
PRO
2
2.3k
[2026前期火5] 論理学(京都大学文学部 前期 第5回)「 ならばの問題演習・proof net・かつの規則」
yatabe
0
370
Human-AI Interaction - Lecture 11 - Next Generation User Interfaces (4018166FNR)
signer
PRO
0
1.1k
Where Data Meets Storytelling
georgesinnott
0
140
解決策を教えても次期リーダーは育たない ─ 器の発達に伴走するために / Partnering with leaders in their vertical development
matsu0228
1
570
【セーフィー】テクニカルライティング&コミュニケーション実践講座(26新卒エンジニア向け研修資料)
ymzaki_m4
0
270
2026年度春学期 統計学 第5回 分布をまとめるー記述統計量(平均・分散など) (2026. 5. 7)
akiraasano
PRO
0
220
Case Studies - Lecture 12 - Information Visualisation (4019538FNR)
signer
PRO
0
180
Case Studies and Future Research - Lecture 12 - Next Generation User Interfaces (4018166FNR)
signer
PRO
0
200
Featured
See All Featured
SEO Brein meetup: CTRL+C is not how to scale international SEO
lindahogenes
1
2.8k
Templates, Plugins, & Blocks: Oh My! Creating the theme that thinks of everything
marktimemedia
31
2.8k
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
620
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
380
Data-driven link building: lessons from a $708K investment (BrightonSEO talk)
szymonslowik
1
1.2k
Designing Powerful Visuals for Engaging Learning
tmiket
1
460
Rebuilding a faster, lazier Slack
samanthasiow
85
9.6k
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
10k
Done Done
chrislema
186
16k
Navigating the moral maze — ethical principles for Al-driven product design
skipperchong
2
420
Design in an AI World
tapps
1
270
ピンチをチャンスに:未来をつくるプロダクトロードマップ #pmconf2020
aki_iinuma
128
56k
Transcript
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY NHK学生ロボコンに向けた ソフトウェア開発と教育から 得られた知見 京都工芸繊維大学ロボコン挑戦プロジェクト
ForteFibre @ ROSConJP 2025
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 今日話すこと • ForteFibreの紹介 •
部内ライブラリ”fibril”の紹介 • 教育プランの紹介・変化
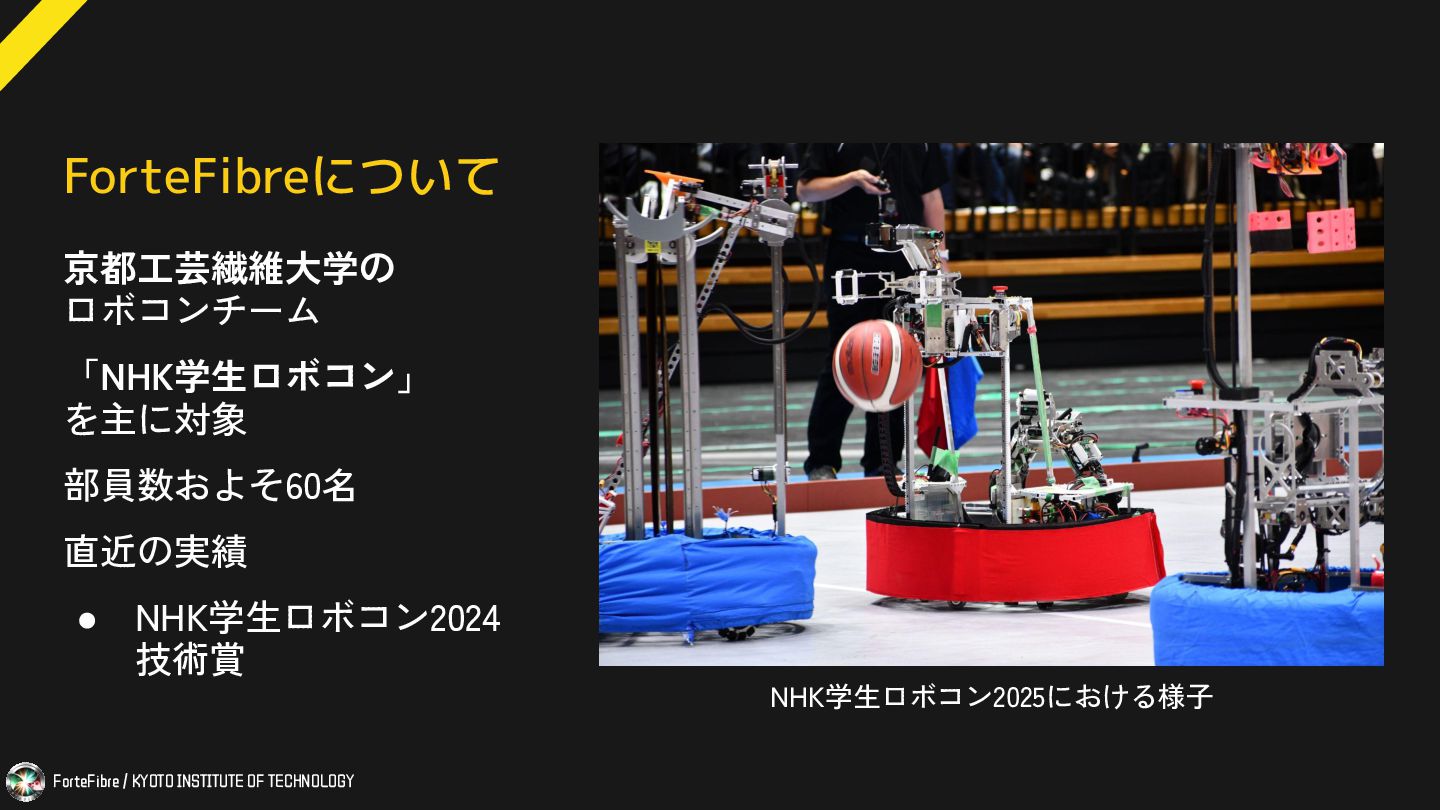
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY ForteFibreについて 京都工芸繊維大学の ロボコンチーム 「NHK学生ロボコン」
を主に対象 部員数およそ60名 直近の実績 • NHK学生ロボコン2024 技術賞 NHK学生ロボコン2025における様子
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 部内ライブラリ “fibril” • 2023年末から開発が始まったROS
2向けライブラリ • 自己位置推定・自動走行・各種ユーティリティ • ROS 2の既存ライブラリを多く使用 → メンテナンスコストを下げる狙い • 機能ごとにNodeを細分化 詳しくは休憩時間などで
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY “fibril”の一部OSS化 ロボコン向けライブラリ: 秘匿することが多い →
独自技術の流出を避けたい・優位性を保ちたい “fibril”は既存OSSの活用により独自技術が少ない → 公開しやすい BehaviorTree関連や ユーティリティ等の公開を進めている
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY fibrilの構成 • common: ROS・組み込みファームウェア向け
• fibril_ros: ROS Node用monorepo • envとactions: ROS環境構築・CI/CD環境 ◦ apt: Binary Packagesの配布 • firmware群: 組み込みファームウェア
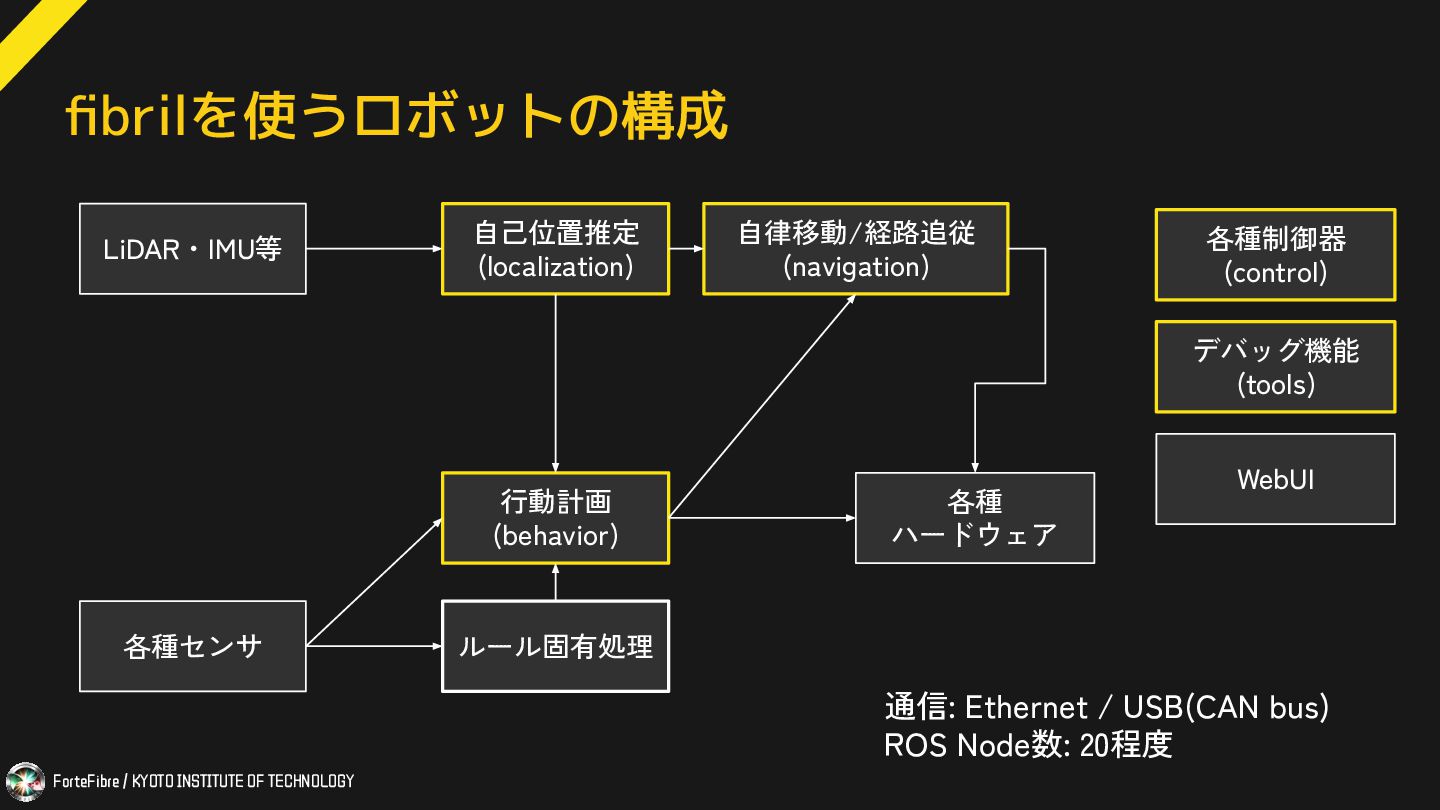
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY fibrilを使うロボットの構成 LiDAR・IMU等 各種センサ 自己位置推定
(localization) 自律移動/経路追従 (navigation) 行動計画 (behavior) ルール固有処理 各種 ハードウェア 通信: Ethernet / USB(CAN bus) ROS Node数: 20程度 デバッグ機能 (tools) WebUI 各種制御器 (control)
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 各種機能の特色: localization ロボコンのフィールド ≒
直線が多く直角の組み合わせ に最適化された軽量な点群処理 • 点群同士のマッチングではなく、 直線の検出 + 直線のマッチング
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 各種機能の特色: ハードウェアとの通信 • CANバスによる通信
• PCとの接続はUSB接続 • enumベースで定義されたプロトコル → 拡張性に限界 → CANopenライクなプロトコルへの移行中
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 教育について
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY なぜ教育をするのか • 新入部員は基本的に初心者 ◦
場合によってはPC操作すらも得意ではない ◦ 適切な知識なしではロボコンはできない → 退部等に繋がる ◦ 有志の団体と大きく異なる点 • 学年制限や卒業 → 次に託せる人材の育成が必須 • 教育をすることで教える側の知識も深くなる 必然的に対象がソフトウェア開発の 経験を持たない
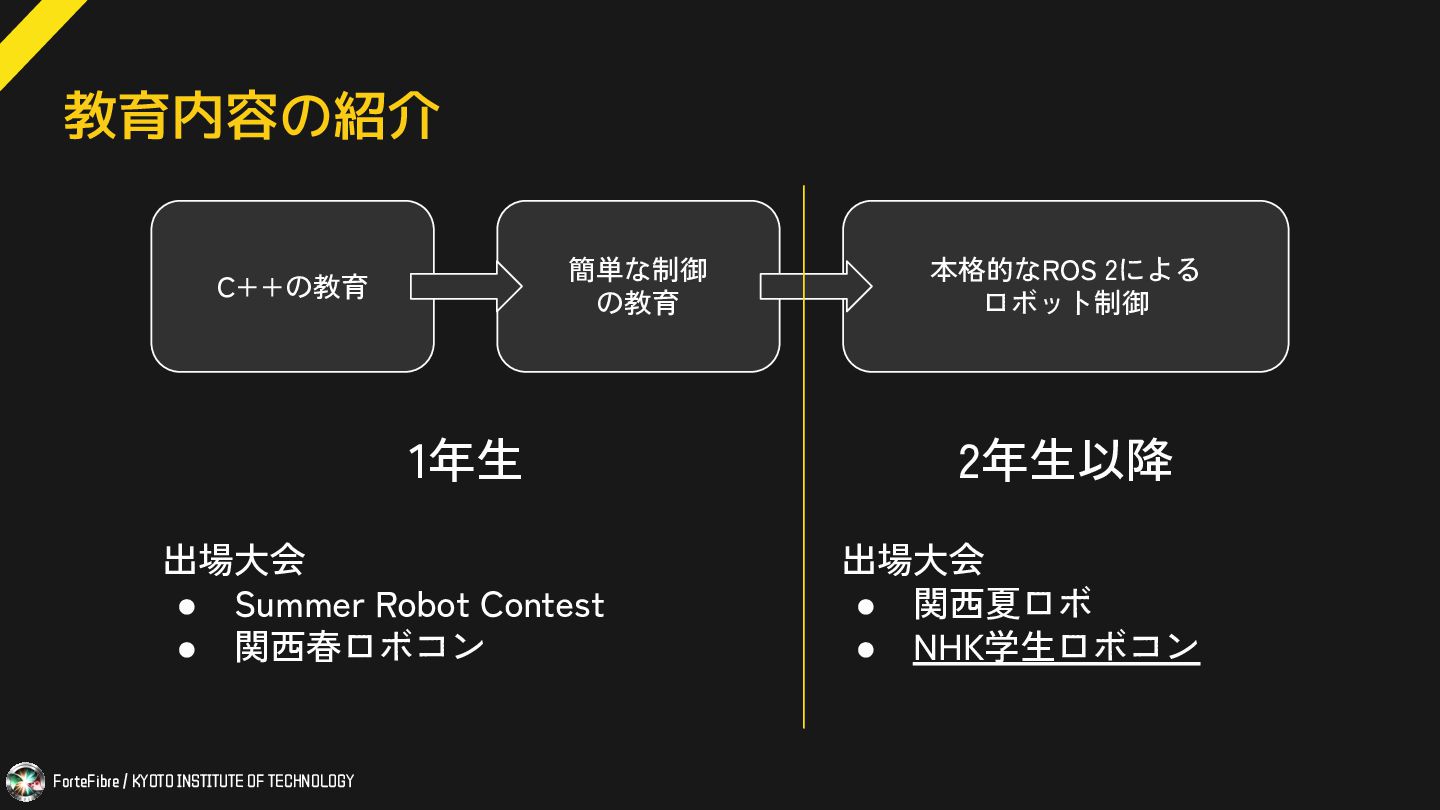
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 教育内容の紹介 C++の教育 簡単な制御 の教育
本格的なROS 2による ロボット制御 1年生 2年生以降 出場大会 • Summer Robot Contest • 関西春ロボコン 出場大会 • 関西夏ロボ • NHK学生ロボコン
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 適切な教育が無い場合に起きること • ライブラリはあるが、使われない •
適切な使用方法で使ってもらえない • 独学に基づく車輪の再発明で時間が溶ける → チームの衰退を招く
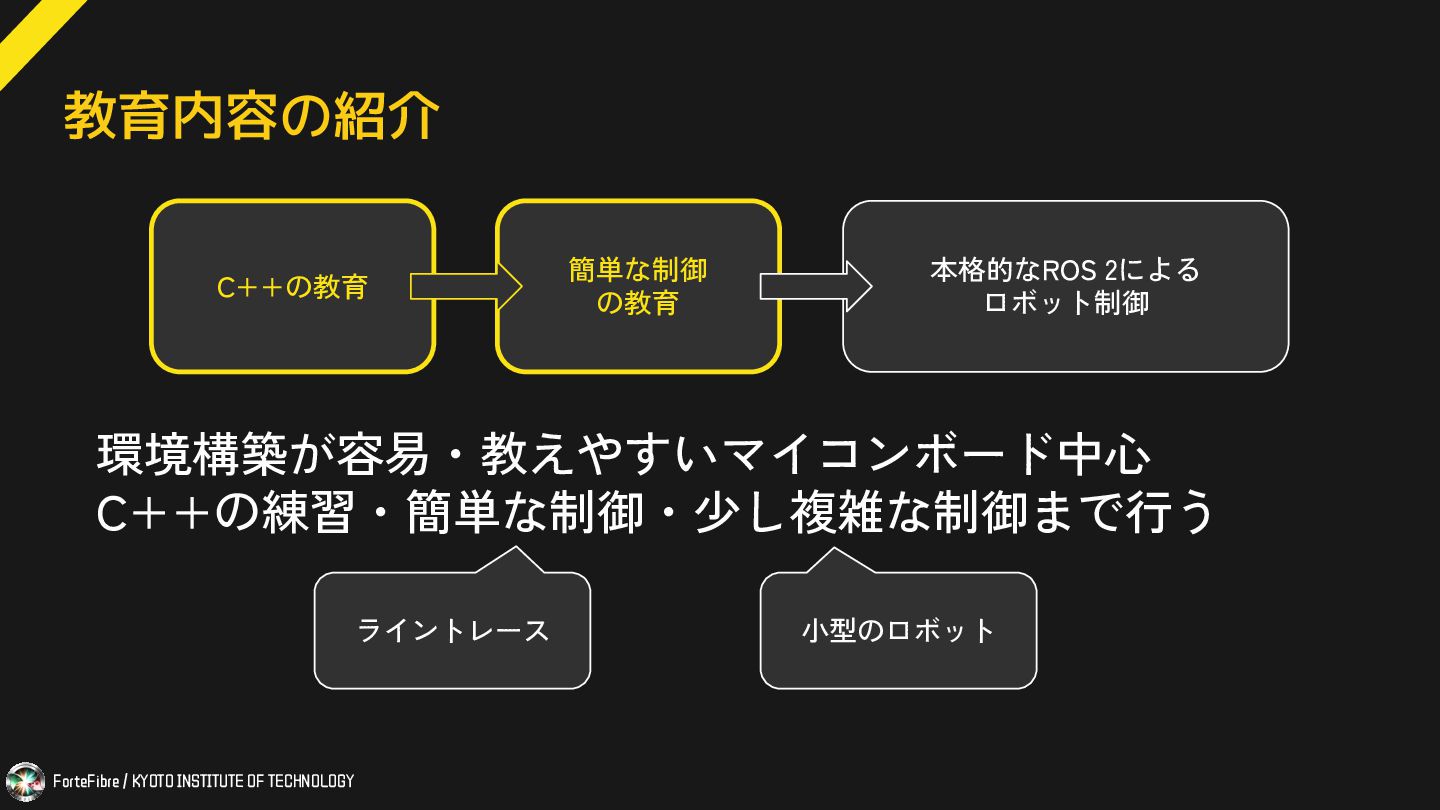
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 教育内容の紹介 C++の教育 簡単な制御 の教育
本格的なROS 2による ロボット制御 環境構築が容易・教えやすいマイコンボード中心 C++の練習・簡単な制御・少し複雑な制御まで行う ライントレース 小型のロボット
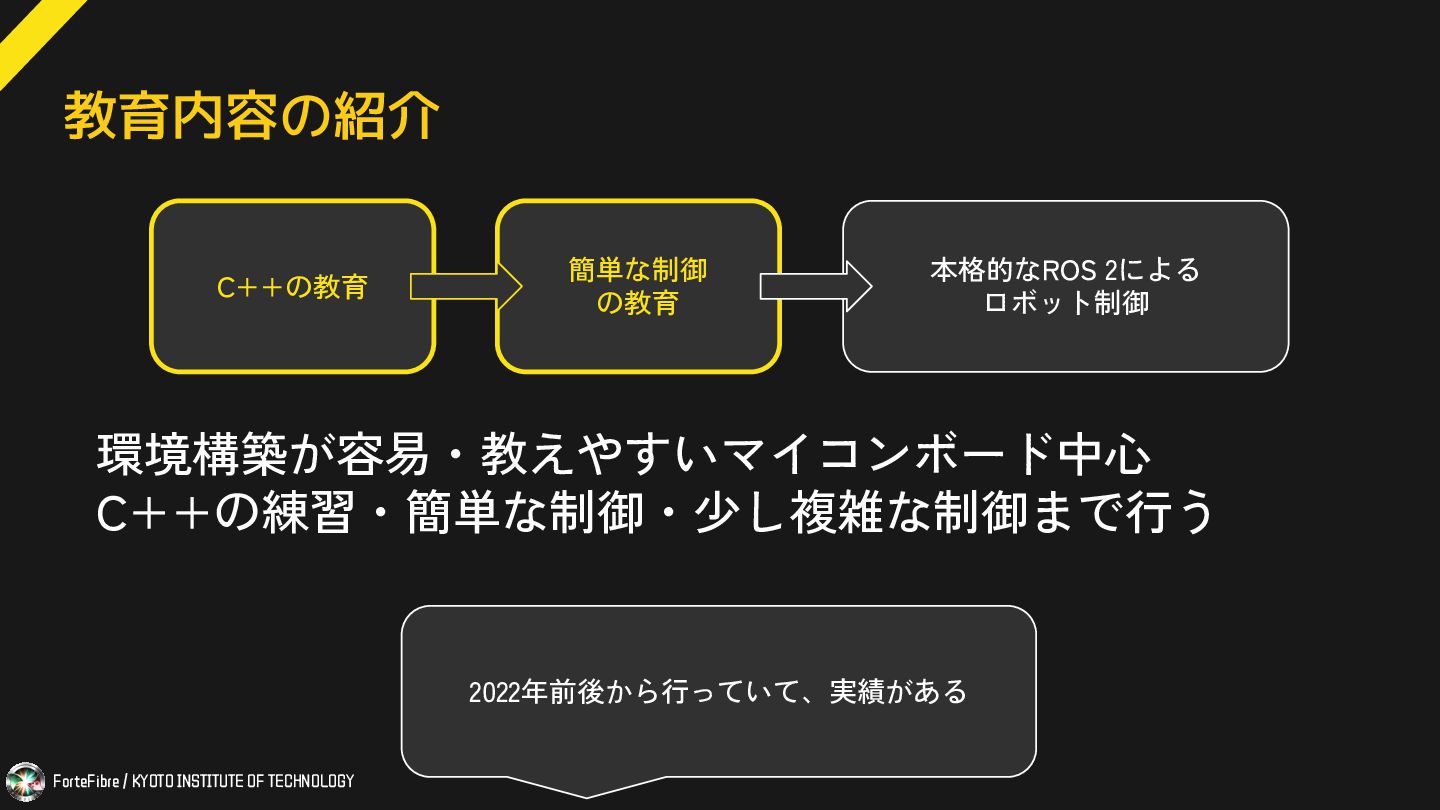
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 教育内容の紹介 C++の教育 簡単な制御 の教育
本格的なROS 2による ロボット制御 環境構築が容易・教えやすいマイコンボード中心 C++の練習・簡単な制御・少し複雑な制御まで行う 2022年前後から行っていて、実績がある
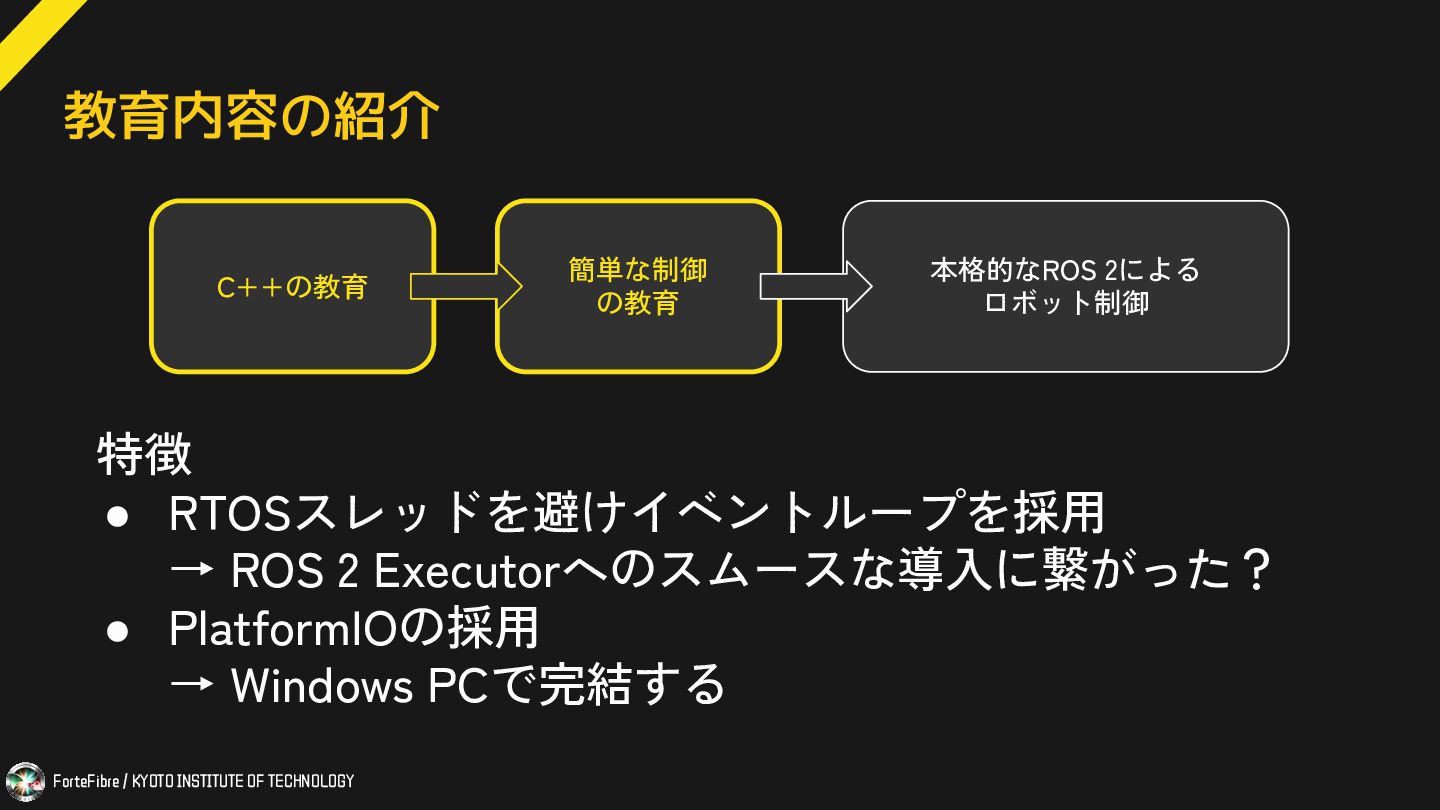
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 教育内容の紹介 C++の教育 簡単な制御 の教育
本格的なROS 2による ロボット制御 特徴 • RTOSスレッドを避けイベントループを採用 → ROS 2 Executorへのスムースな導入に繋がった? • PlatformIOの採用 → Windows PCで完結する
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 教育内容の紹介 C++の教育 簡単な制御 の教育
本格的なROS 2による ロボット制御 ROS 2について教育: 年度ごとに大きく変化している → つまづく人が多発していたため 今回の発表ではこの部分の変化を主に取り上げる
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY ROS 2教育 今までやったこと •
公式チュートリアルベースの自習 ◦ 読み合い(輪読) • 公式チュートリアルの簡易版(日本語)の作成 ◦ 教材の試行錯誤 • 「ロボットを動かす」を中心とした講習 • ROS 2ハンズオン(OUXT 片岡さん)
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 公式チュートリアルベースの自習・勉強会 docs.ros.orgにあるチュートリアルを各自やってもらった • 言語の壁と「面白くない」→
苦手意識を持つ人 🐢とリアルのロボットが紐付かない • 部のロボットを使う知識 ≪ チュートリアルの知識 • 各自やる形式だと躓いた際にやる気を無くしたり… ROSを学習する時期に動かせるロボットが 無かったことも面白くないに繋がった
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 公式チュートリアルの簡易版(日本語)の作成 日本語の資料として以下のような内容を作成 • 基礎的なCLIの使い方
• C++によるトピック通信の方法と実践 • rosbagの使用方法 → 公式チュートリアルよりは導入として良さそう
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY (その後あった)教材の試行錯誤 色々な視点から教材(記事)が作成された • ros2cliの解説を通じて「使う」ことに特化する記事
• 「モータを動かす」のような物理重視 • C++でノード作成として簡易シミュレータ作成 内容の重複込で 60記事くらいあった
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY (その後あった)教材の試行錯誤 色々な視点から教材(記事)が作成された • ros2cliの解説を通じて「使う」ことに特化する記事
• 「モータを動かす」のような物理重視 • C++でノード作成として簡易シミュレータ作成 内容の重複込で 60記事くらいあった 比較的良いフィードバック
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY ROS 2ハンズオン(OUXT 片岡さん) •
Dockerベースの初心者向けハンズオン • Nav2によるデモ + 解説付きのNode開発 → 1回実施のみに留まるも、解説付きC++コードなどは 部内でも参考になっている
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY 現在の方針: 「ロボットを動かす」を中心とした講習 1. 過去の大会のシミュレータでイメージを持ってもらう
◦ ノード図なども見せる 2. IPCの考え方やノード等基本概念を覚えてもらう 3. マイコンで動かしたロボットをROSで動かす ◦ あまりコードは書かない 4. 簡単なノードを書いてもらう
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY つまり言いたいこととして… 学生団体(大学の団体)がROS 2教育をするなら… •
最初に「おもしろそう」となってもらう ◦ 凄そうなデモや実機を最初に持ってくる • (ライブラリが整備されているなら) そこから始めたほうがいい • 日本語のほうが良い
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY オマケ: 誤った独学の例 • モノリスなNodeの誕生
→ マイコン時代のコードがほぼそのままやってきた形
ForteFibre / KYOTO INSTITUTE OF TECHNOLOGY ご清聴ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}