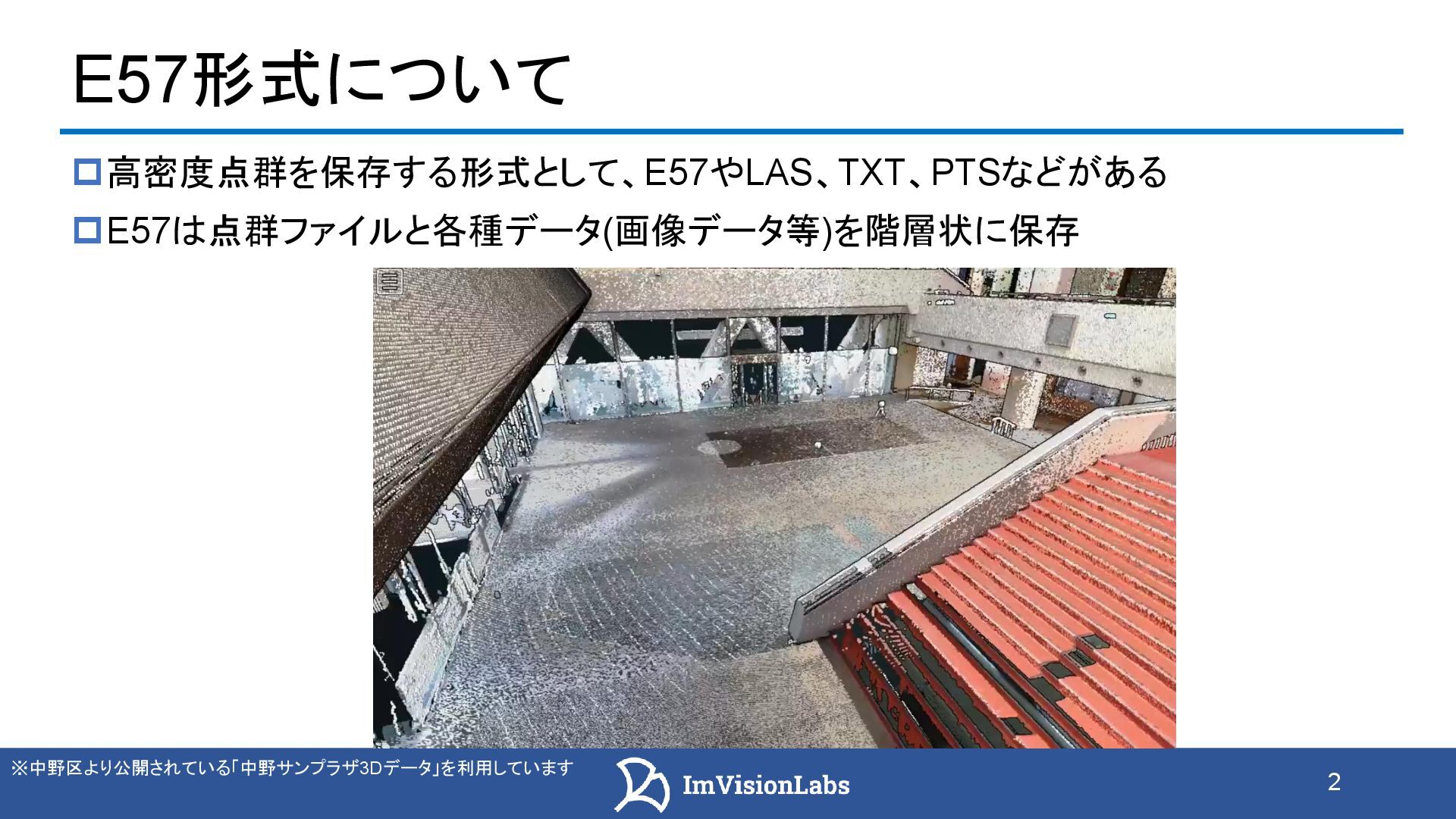
出典:「Example of a pairwise registration of laser scans」,Automatic registration of partially overlapping terrestrial laser scanner point clouds,Institute of Geodesy and Photogrammetry, ETH Zürich. 異なる計測地点の点群を組み合わせるイメージ 異なる地点から計測するイメージ E57形式では、各スキャンごとに取得された点群とともに、スキャナの位置・姿勢(向 き)や取得時の画像情報などが個別に記録される。
{kind=link}
{kind=link}
![3 バックパック型スキャナー iPhone12 LiDAR [動画] LASファイルとE57ファイルの違い 項目 LAS形式 E57形式 拡張子](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_2.jpg){kind=link}
![4 バックパック型スキャナー [動画] E57ファイルの概要 例えばLeica社のCycloneやiPhone LiDARのア プリのDot3Dで点群をエキスポート可能 右の画像はDot3Dで点群をエキスポートするとき の様子 画像の一番下にE57形式がある](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_3.jpg){kind=link}
{kind=link}
![6 バックパック型スキャナー iPhone12 LiDAR [動画] E57ファイルのデータ構造 Dota3D(3次元的)とImages2D(2次元的)に分かれている 画像出典:e57FileReader https://jp.mathworks.com/help/lidar/ref/e57filereader.html 点群データやメタ情報に加え計測時のスキャナやカメラの姿勢情報なども格納されている](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_5.jpg){kind=link}
{kind=link}
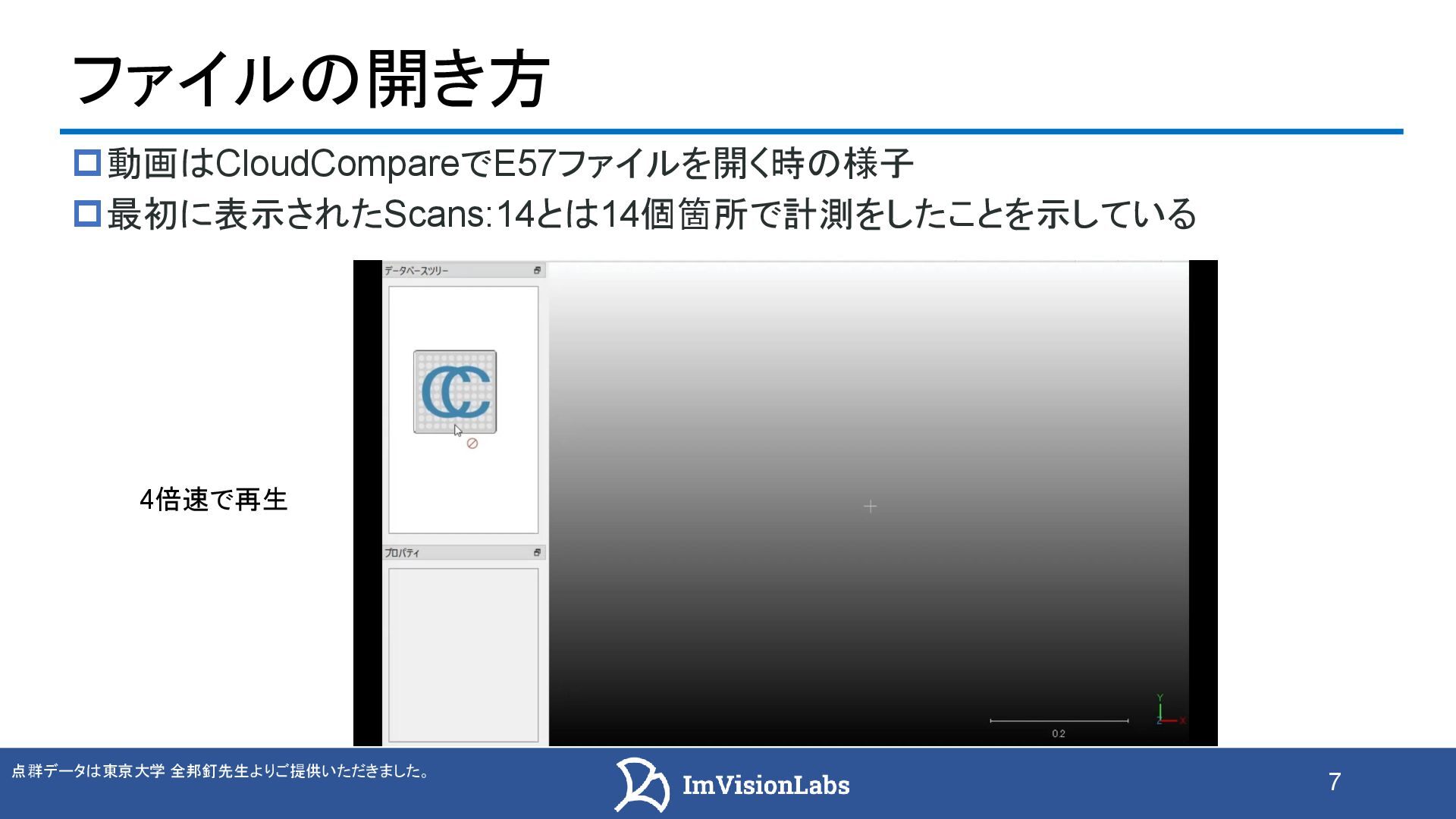
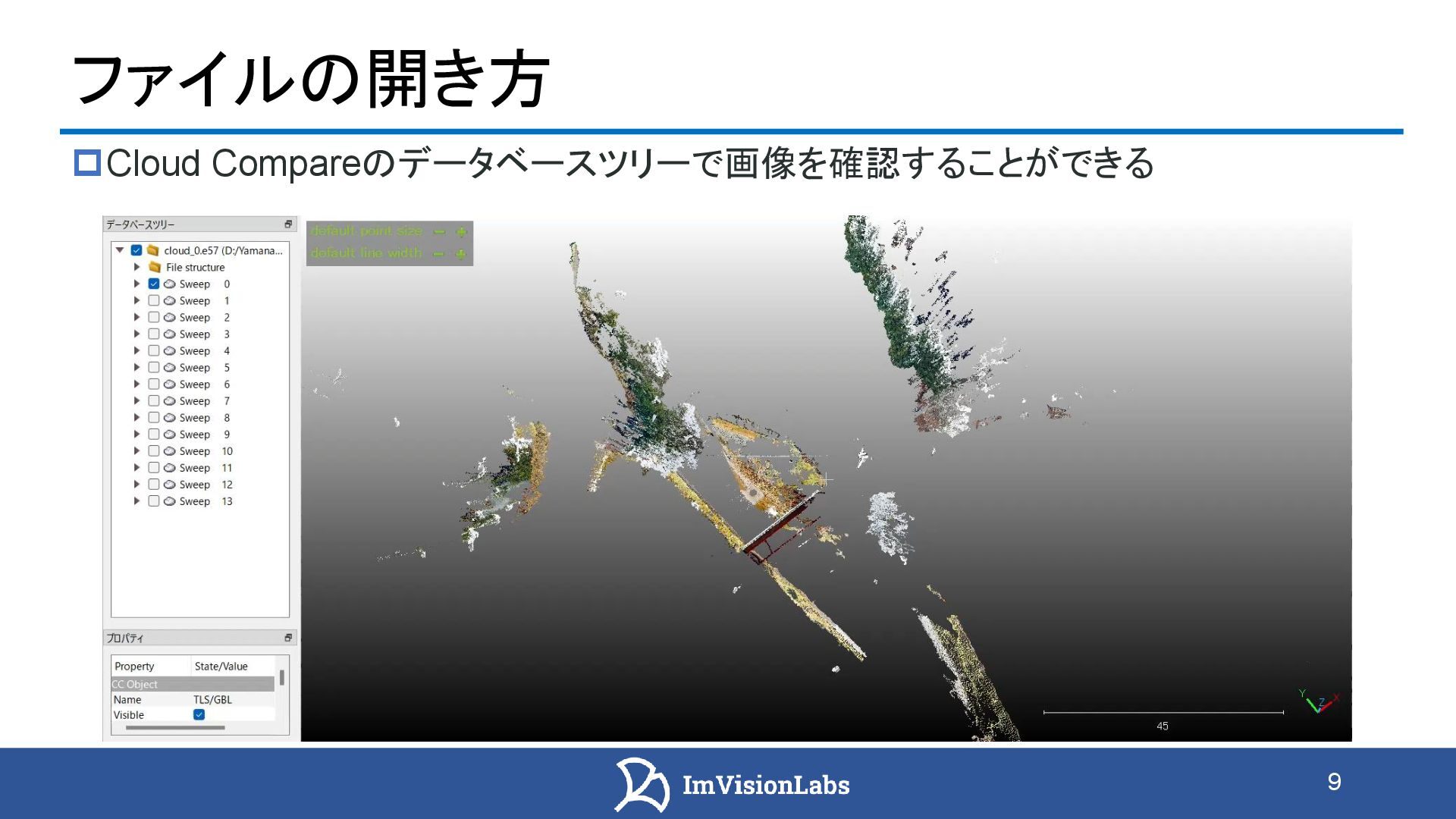
![8 バックパック型スキャナー iPhone12 LiDAR [動画] ファイルの開き方 CloudCompareのデータベースツリーで点群を確認することができる](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_7.jpg){kind=link}
{kind=link}
![10 バックパック型スキャナー iPhone12 LiDAR E57ファイルのデータ構造 E57ファイルに格納されているカメラの姿勢情報などを利用して点群と画像データを 重ね合わせて表示することもできる [a] 画像データ [b]](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
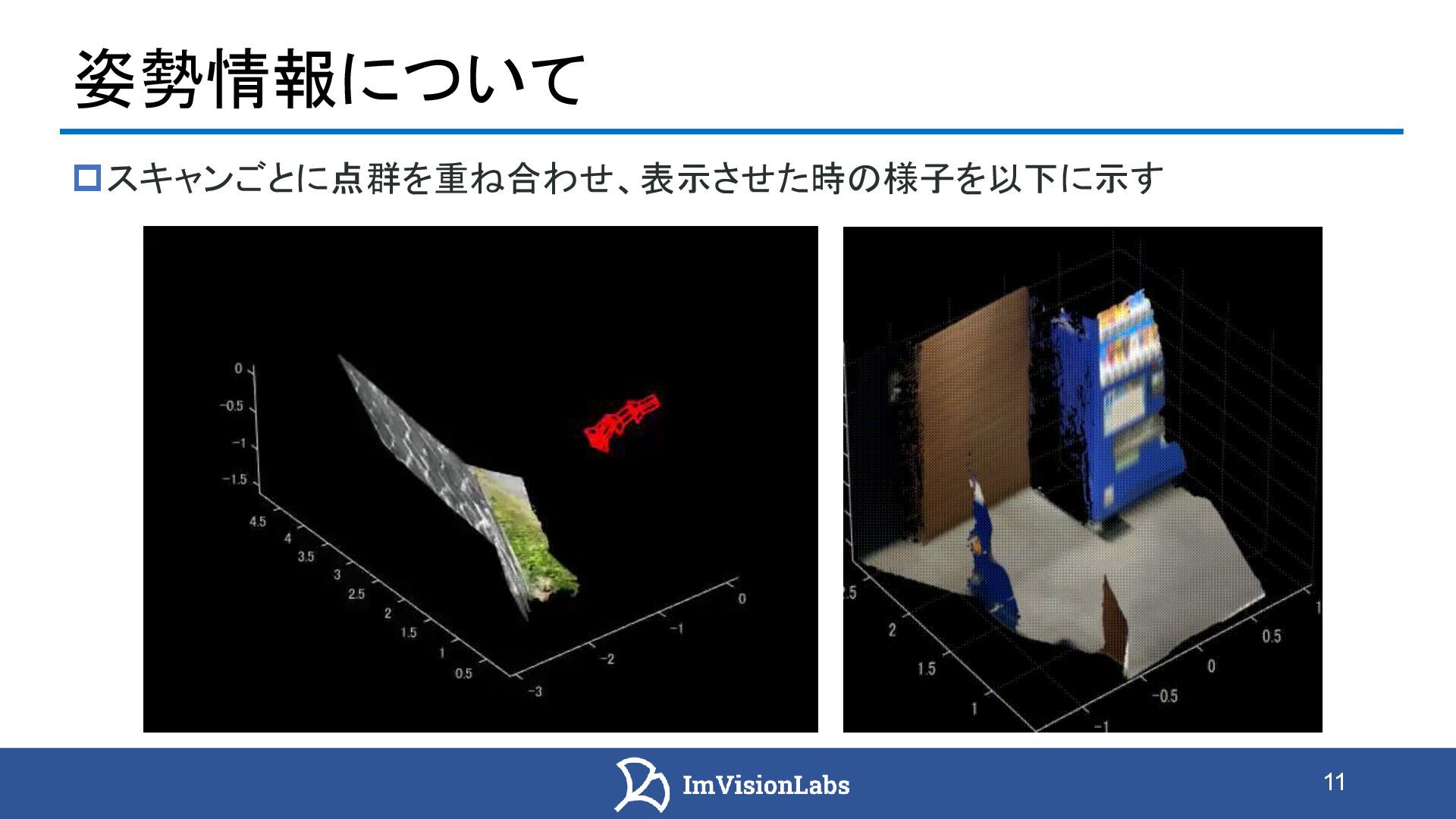
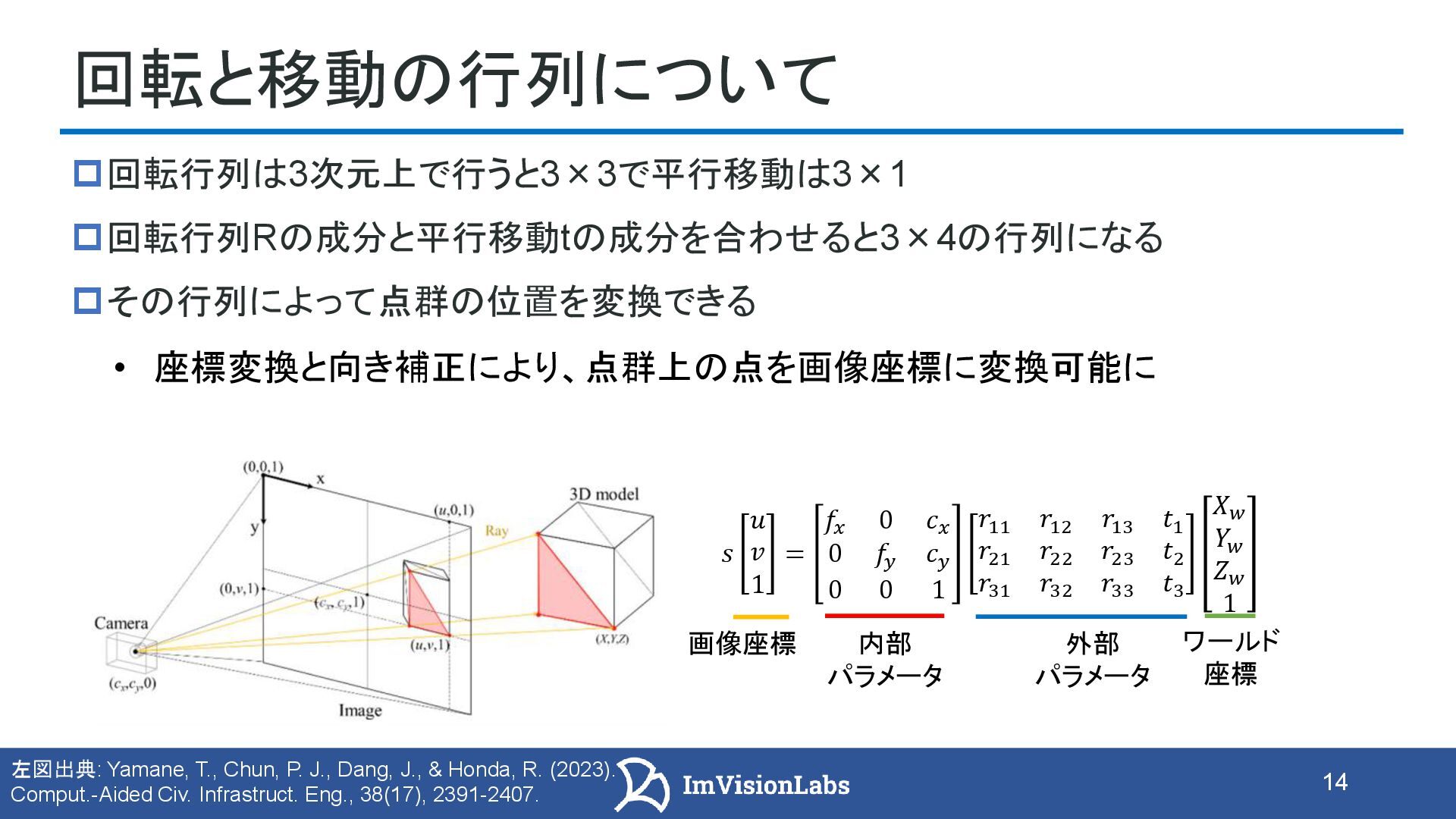
![15 [動画] 姿勢情報について 複数回のスキャンで得られた点群の位置を行列でそれぞれ変換 変換した後、重ね合わせると全体の点群を取得 全体の点群 = スキャン1の点群(変換後)+ スキャン2の点群(変換後)+ ・・・](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_14.jpg){kind=link}
![16 バックパック型スキャナー iPhone12 LiDAR [動画] 画像上で人のセグメンテーションをし、その結果を点群上にマッピングし、ノイズ除去 レーザースキャナ中のカメラ画像と点群とのセンサーフュージョン 応用例: LiDARとカメラのセンサーフュージョンによる点群からのノイズ除去 人のセグメンテーション](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_15.jpg){kind=link}
![17 バックパック型スキャナー iPhone12 LiDAR [動画] 応用例: E57形式の点群を利用したノイズ除去 点群を取得する際、人のノイズが入ることがある 一定の点群密度を持っていたり、周囲との連続性もあるため除去が難しい場合がある ScanX2.0](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_16.jpg){kind=link}
![18 バックパック型スキャナー iPhone12 LiDAR [動画] 結果 人を対象としてノイズ除去を実行:結果は赤で表示 従来のノイズ除去手法では難しい対象にセンサーフュージョンでの処理を実現 [a] LiDARから取得した画像から人を検出](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
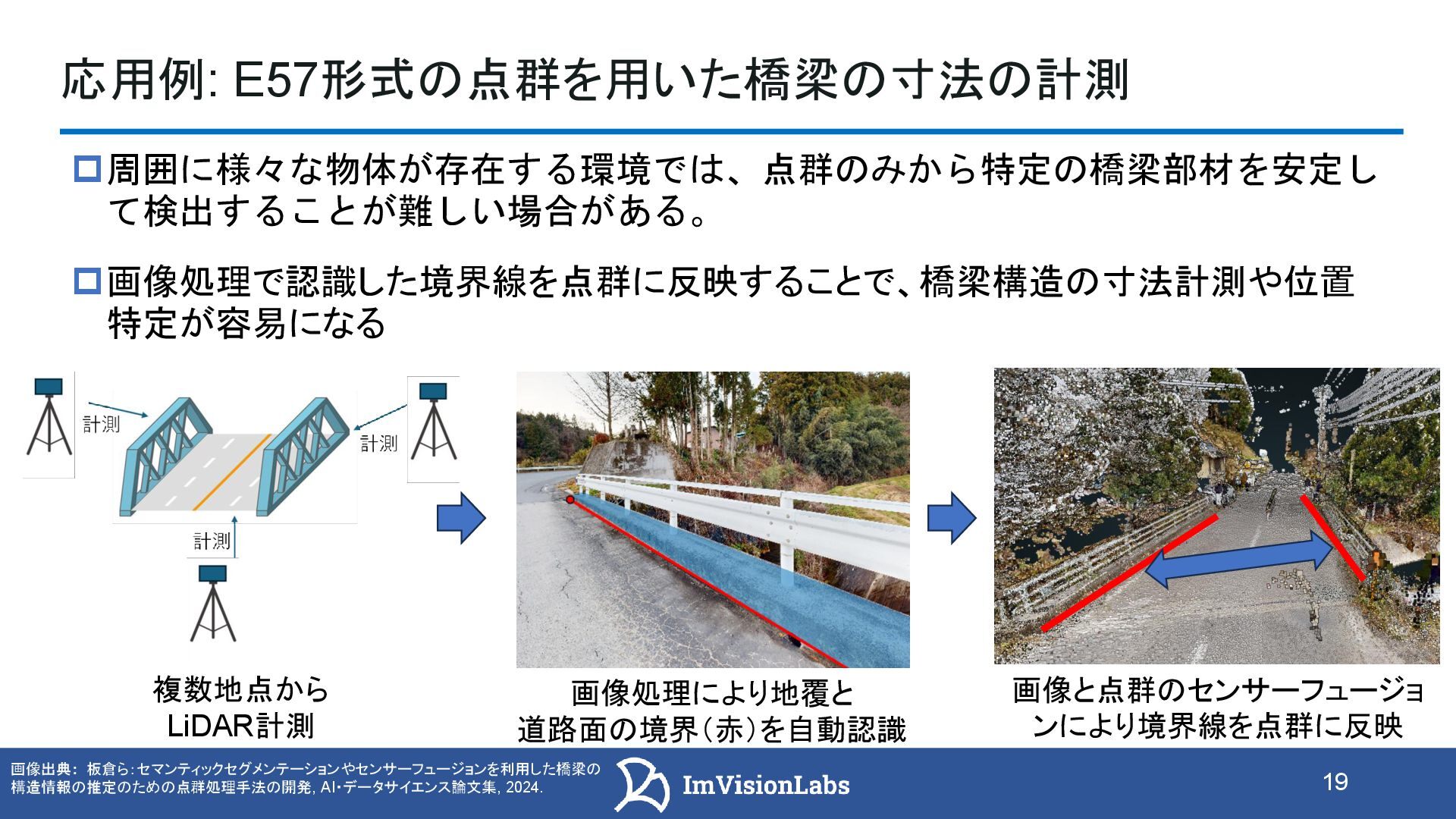
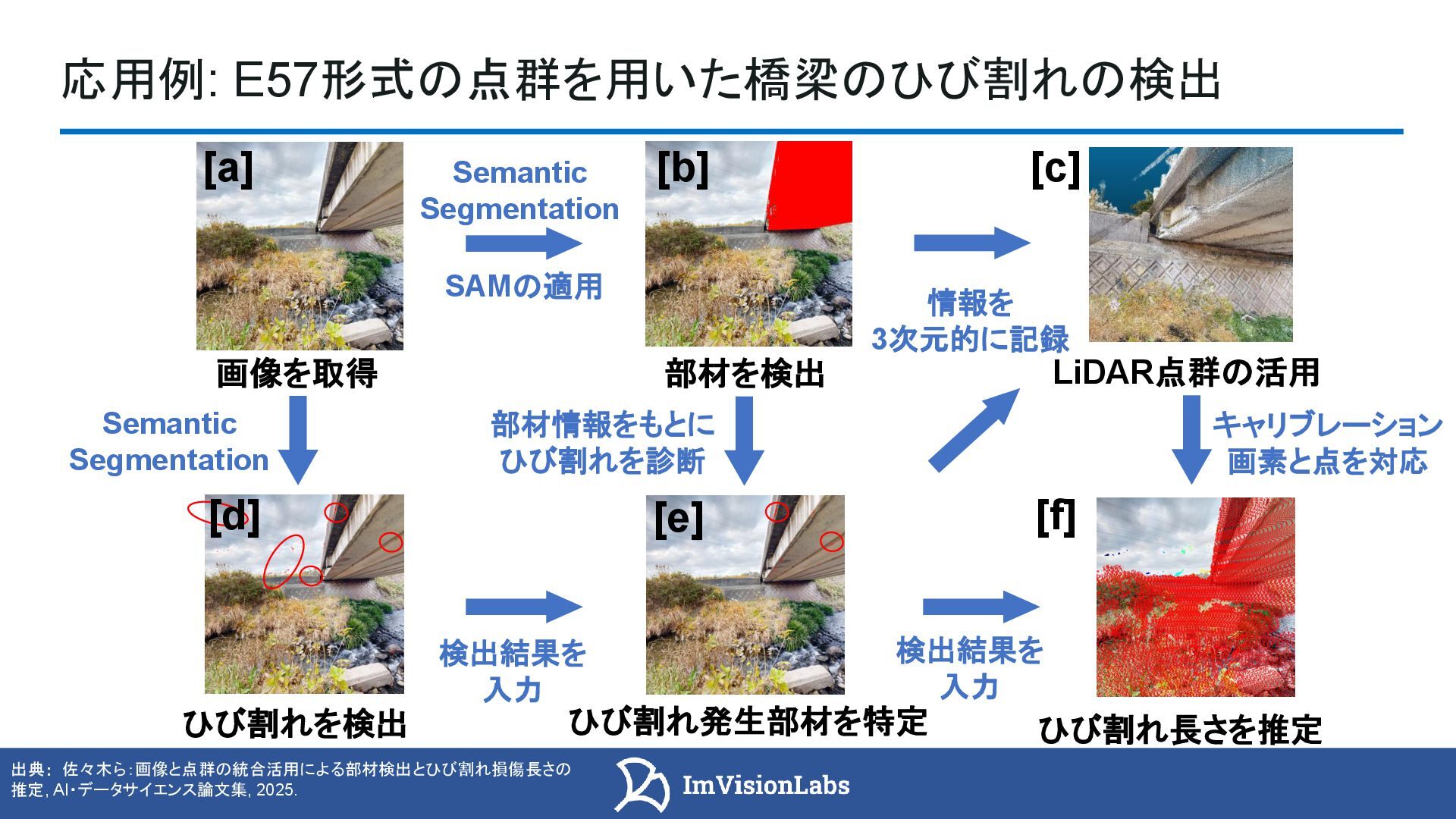
![21 バックパック型スキャナー iPhone12 LiDAR [動画] 点群の形式であるE57についてのまとめ 画像と点群を同時に扱えるため、画像×点群のセンサーフュージョン(例:人の検出 結果を点群に投影してノイズ除去、境界線を点群に反映して計測支援)など、応用の 幅が広い 各スキャンに対応する4×4同次変換行列で座標変換し、変換後の点群を重ね合わ](https://files.speakerdeck.com/presentations/9f4abcdd6d55447ab2a88510c73f805b/slide_20.jpg){kind=link}