Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
放課後レクチャ(2022)
Search
MinchiMinchi
June 11, 2025
160
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
放課後レクチャ(2022)
スポーツにテクノロジが どのように関わっているか?
三村泰成(鶴岡高専)
2022年7月14日
鶴岡高専での公開講座
MinchiMinchi
June 11, 2025
More Decks by MinchiMinchi
See All by MinchiMinchi
何故,協調活動が創出するのか?
minchiminchi
0
340
大円距離の式の導出
minchiminchi
0
72
戦術面のトレーニングで感じてほしいこと(何故,協調活動が創出するのか?)
minchiminchi
0
110
戦術面のトレーニングで感じてほしいこと(何故,協調活動が創出するのか?)
minchiminchi
1
290
オフ・ザ・ボールの選手位置に関する データ記録方法の検討
minchiminchi
0
74
ジャンプ動作時の床反力発生に関する力学的考察
minchiminchi
0
1.5k
力学の基本原理を用いたオーバハンドパス における合理的ルール構築の検討
minchiminchi
1
930
ラインジャッジにおける人間の認知限界の検討
minchiminchi
0
810
身体を用いたボールヒットにおける撃心についての検討
minchiminchi
1
540
Featured
See All Featured
How Software Deployment tools have changed in the past 20 years
geshan
0
34k
Claude Code どこまでも/ Claude Code Everywhere
nwiizo
65
56k
Future Trends and Review - Lecture 12 - Web Technologies (1019888BNR)
signer
PRO
0
3.6k
Facilitating Awesome Meetings
lara
57
7k
Heart Work Chapter 1 - Part 1
lfama
PRO
8
36k
StorybookのUI Testing Handbookを読んだ
zakiyama
31
6.8k
SEO in 2025: How to Prepare for the Future of Search
ipullrank
3
3.6k
Bioeconomy Workshop: Dr. Julius Ecuru, Opportunities for a Bioeconomy in West Africa
akademiya2063
PRO
1
180
4 Signs Your Business is Dying
shpigford
187
22k
How To Speak Unicorn (iThemes Webinar)
marktimemedia
1
510
The Anti-SEO Checklist Checklist. Pubcon Cyber Week
ryanjones
0
180
Between Models and Reality
mayunak
4
370
Transcript
スポーツにテクノロジが どのように関わっているか? 2022年7月14日(木) 1 創造工学科 情報コース 准教授 三村 泰成
目次 2 1.ニュートン力学と動作の原理原則 2.ゲームの記録,分析,評価 3.選手,チームの学習環境
1.ニュートン力学と動作の原理原則 3
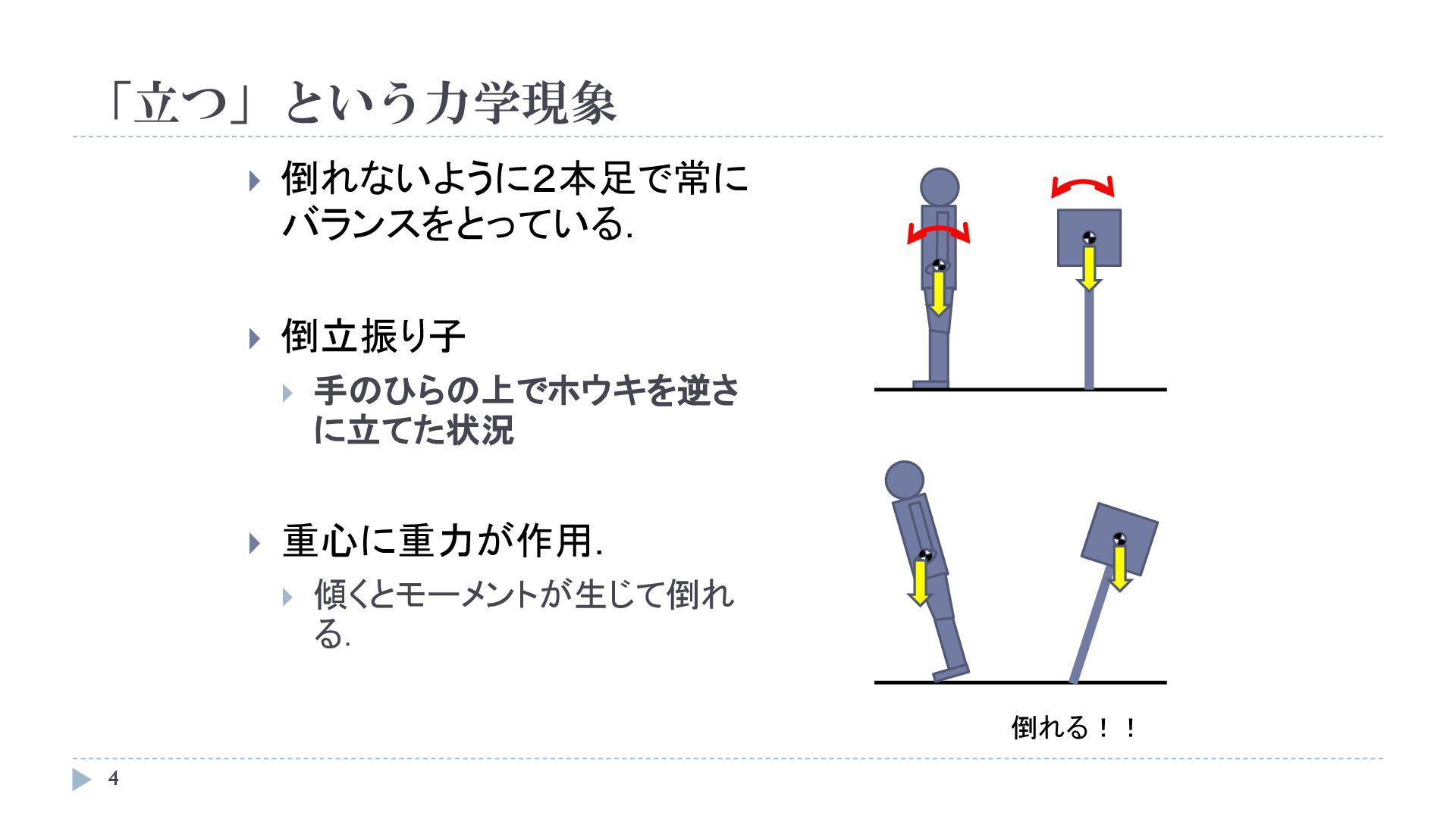
「立つ」という力学現象 4 倒れないように2本足で常に バランスをとっている. 倒立振り子 手のひらの上でホウキを逆さ に立てた状況
重心に重力が作用. 傾くとモーメントが生じて倒れ る. 倒れる!!
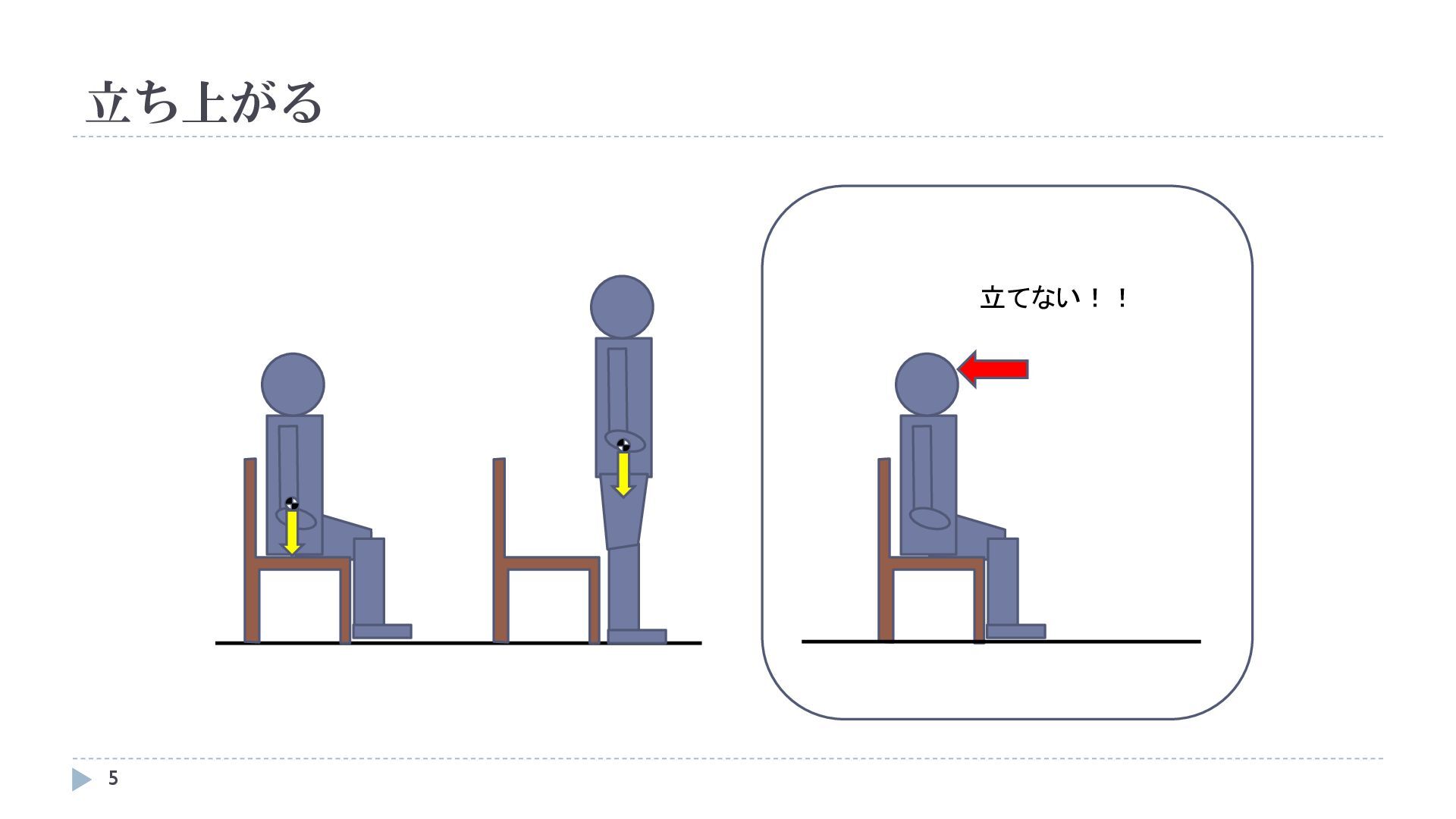
立ち上がる 5 立てない!!
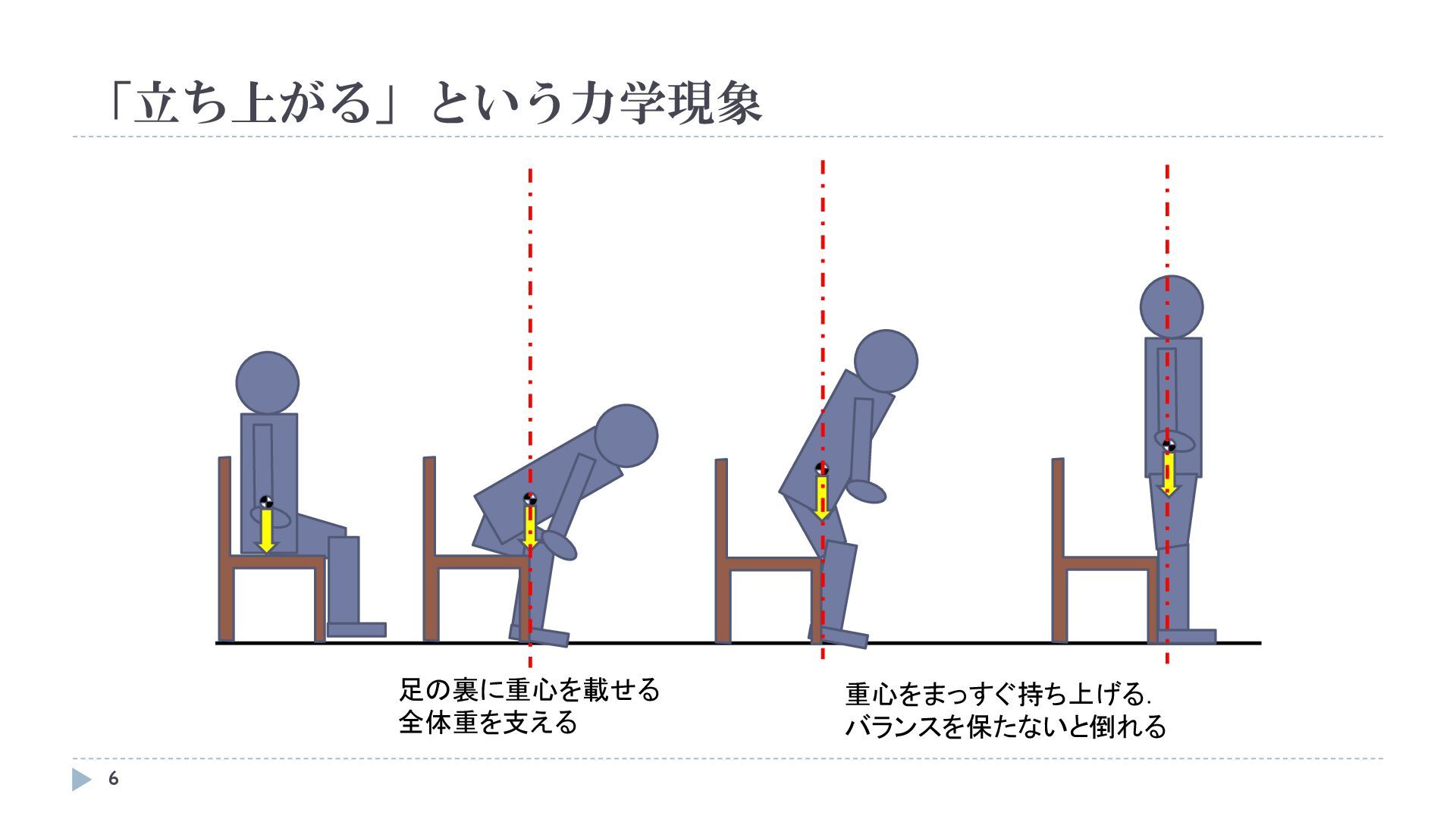
「立ち上がる」という力学現象 6 足の裏に重心を載せる 全体重を支える 重心をまっすぐ持ち上げる. バランスを保たないと倒れる
「動作原理」を理解する 7 力学現象として発生しうること 力学現象として発生させたいこと 形は人それぞれ,手順も人それぞれ,... 同じ目標なら,同じような動作になる可能性が大きい
が,まったく同じにはならない! 動作原理 動作補助,動作指導のときは注意が必要. ⚫ 動作を教えることはできない. ⚫ 自分自身で感じて,発見するしかない. ⚫ 自分自身で試行錯誤するしかない.
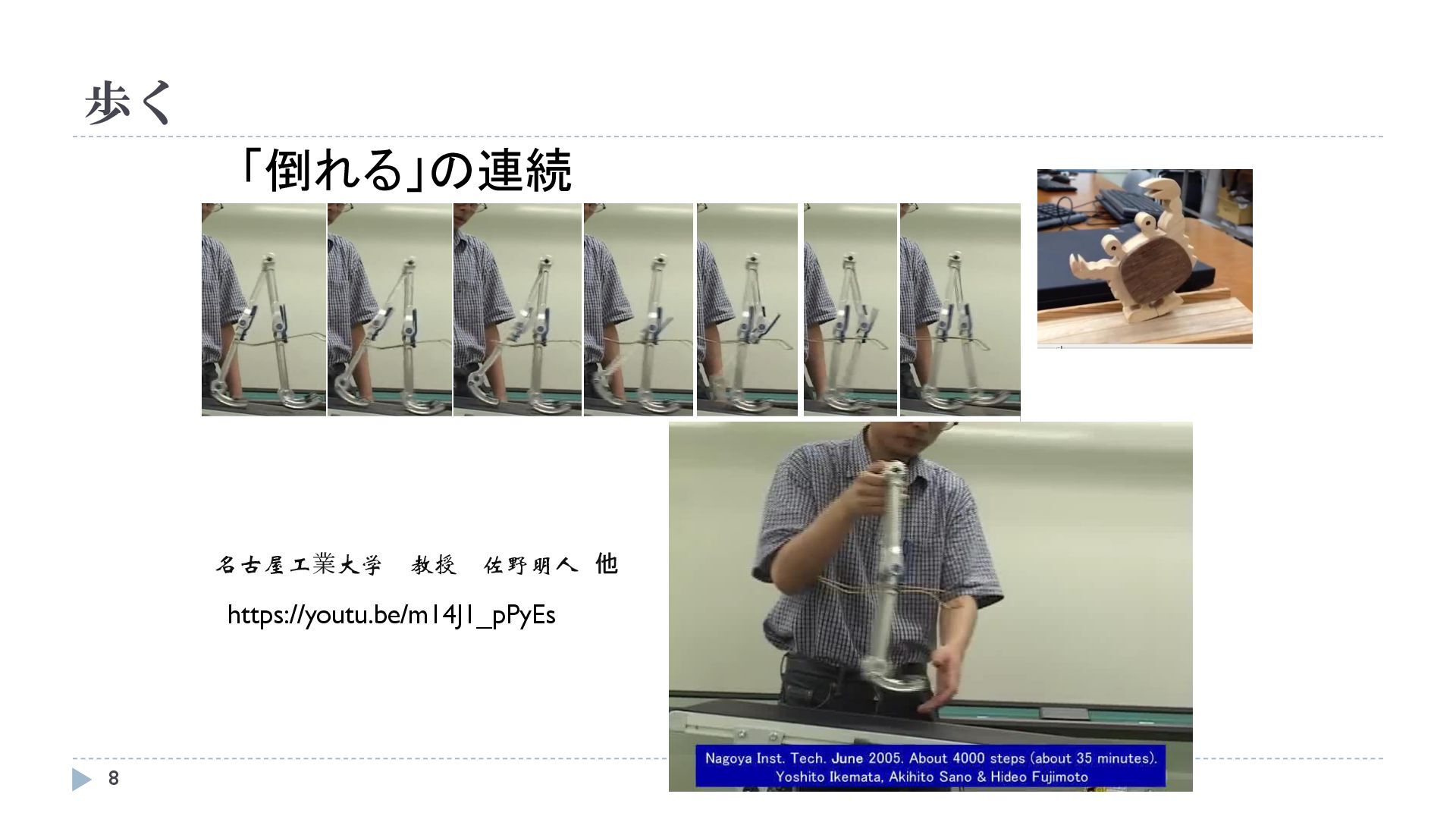
歩く 8 https://youtu.be/m14J1_pPyEs 名古屋工業大学 教授 佐野明人 他 「倒れる」の連続
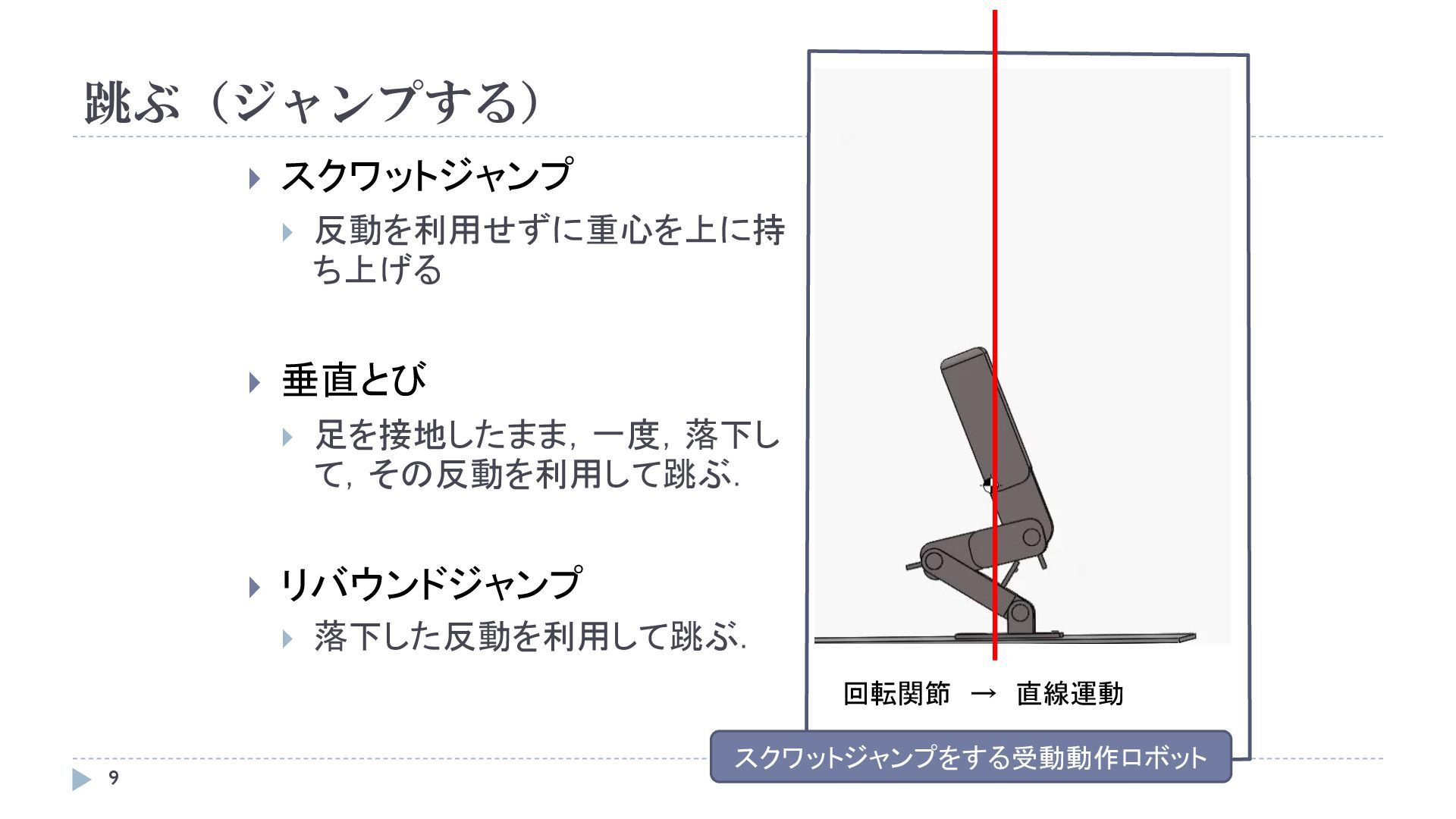
跳ぶ(ジャンプする) 9 回転関節 → 直線運動 スクワットジャンプをする受動動作ロボット スクワットジャンプ 反動を利用せずに重心を上に持
ち上げる 垂直とび 足を接地したまま,一度,落下し て,その反動を利用して跳ぶ. リバウンドジャンプ 落下した反動を利用して跳ぶ.
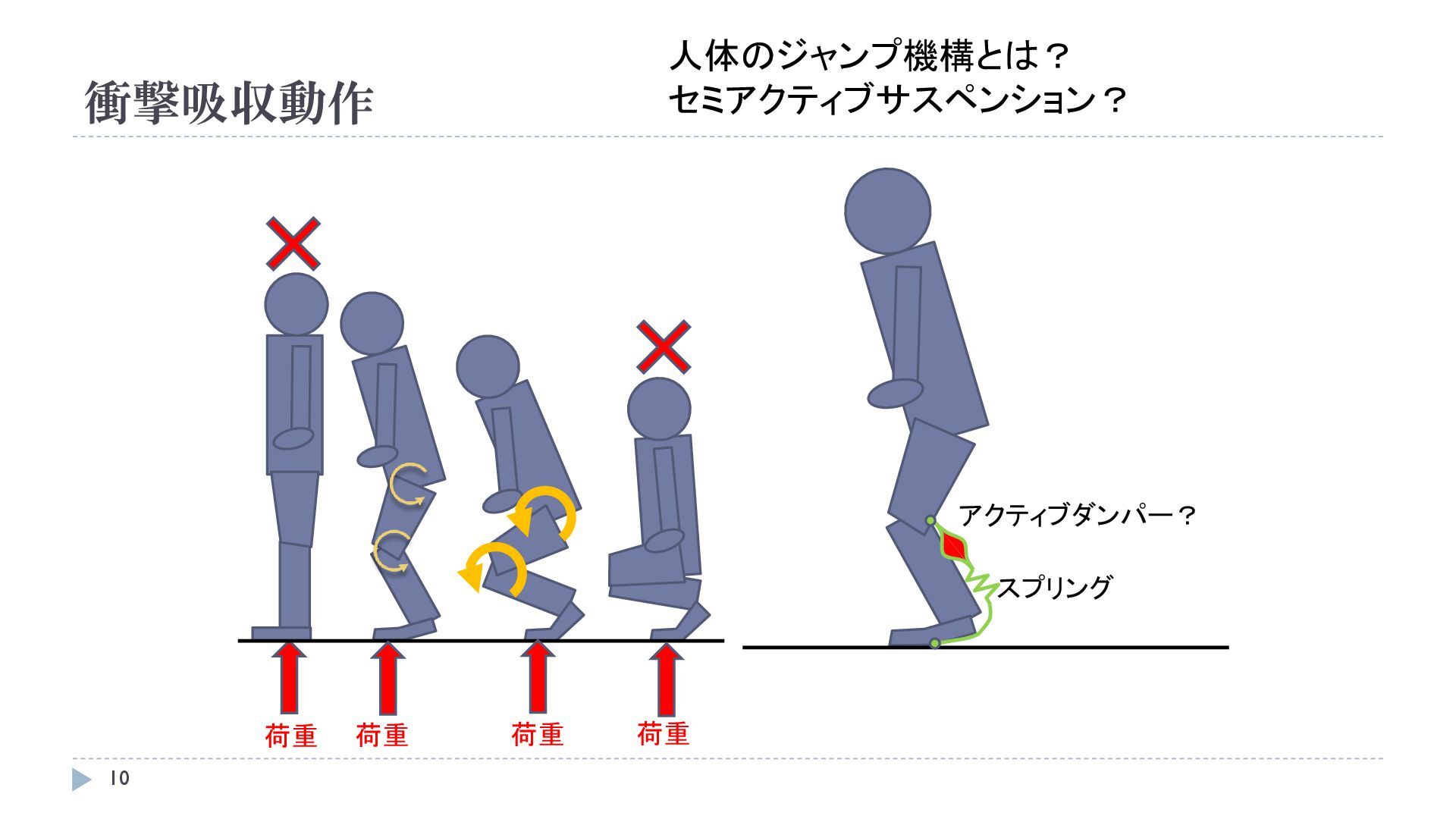
衝撃吸収動作 10 人体のジャンプ機構とは? セミアクティブサスペンション? 荷重 荷重 荷重 荷重 アクティブダンパー? スプリング
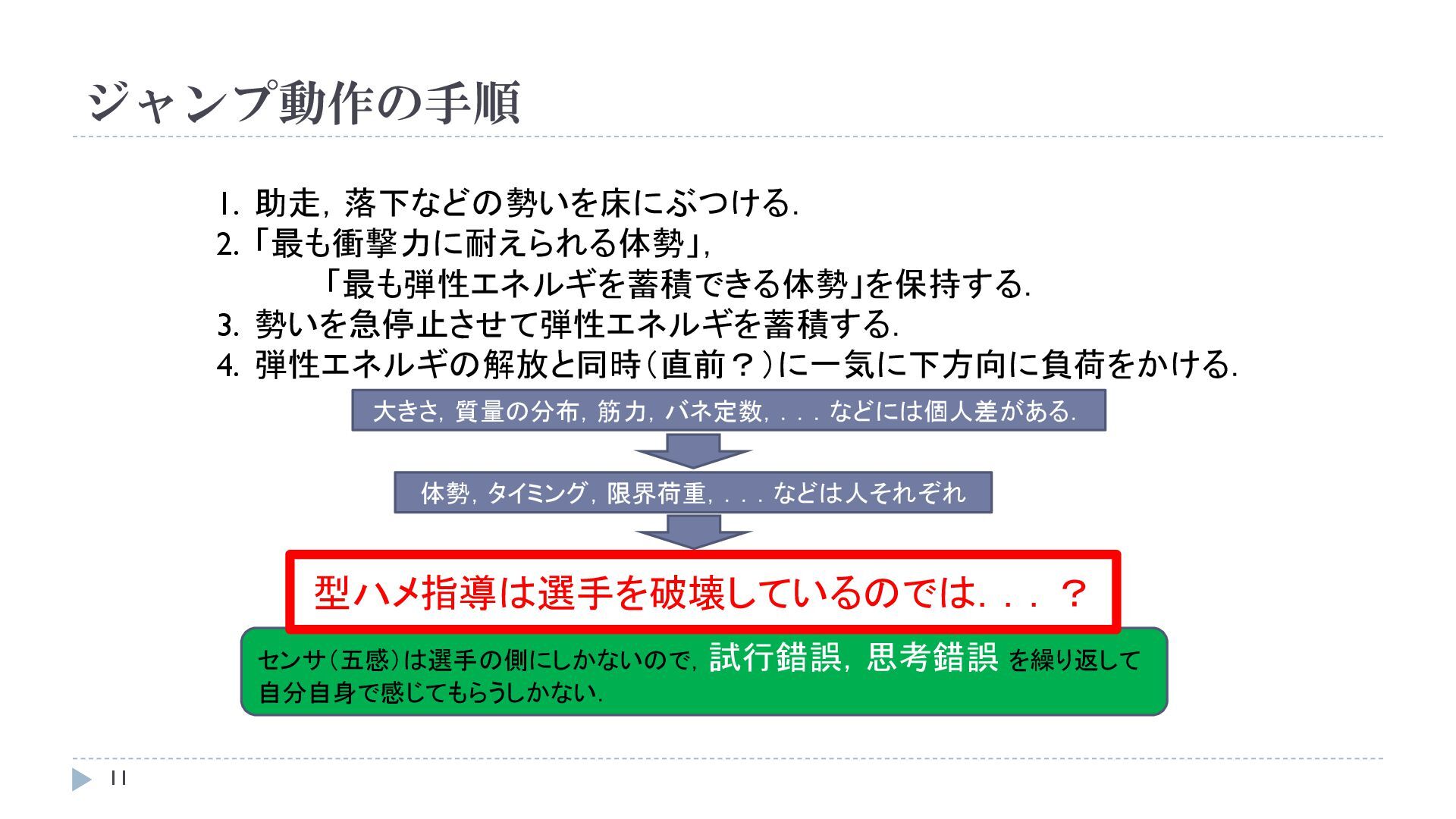
センサ(五感)は選手の側にしかないので,試行錯誤,思考錯誤 を繰り返して 自分自身で感じてもらうしかない. ジャンプ動作の手順 11 1. 助走,落下などの勢いを床にぶつける. 2. 「最も衝撃力に耐えられる体勢」, 「最も弾性エネルギを蓄積できる体勢」を保持する.
3. 勢いを急停止させて弾性エネルギを蓄積する. 4. 弾性エネルギの解放と同時(直前?)に一気に下方向に負荷をかける. 大きさ,質量の分布,筋力,バネ定数,...などには個人差がある. 体勢,タイミング,限界荷重,...などは人それぞれ 型ハメ指導は選手を破壊しているのでは...?
走る 12 片足のリバウンドジャンプの繰り返し Analistic Sports https://youtu.be/lEwNZCw8d5U アサファ・パウエル フォアフット(つま先着地)
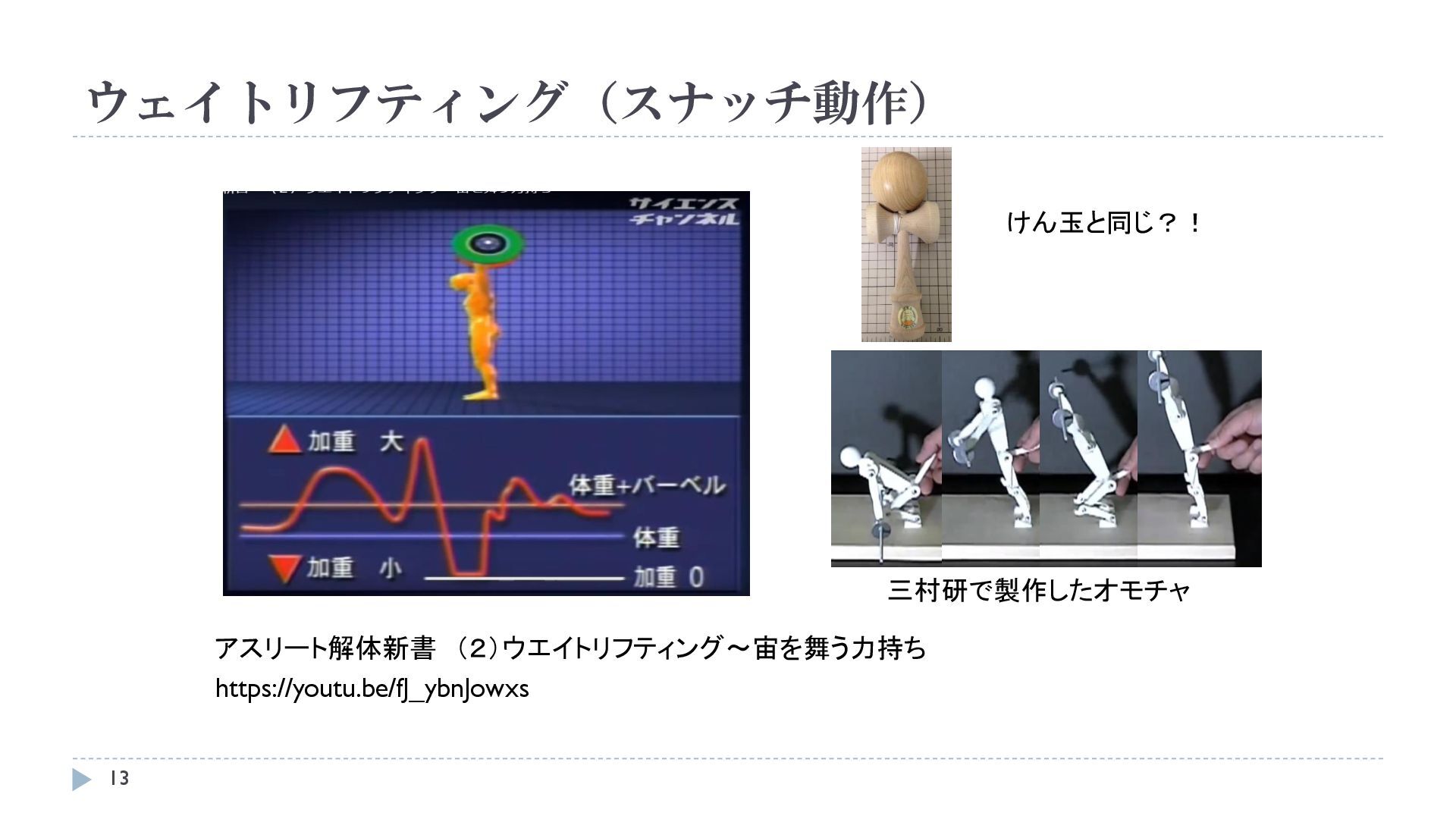
ウェイトリフティング(スナッチ動作) 13 https://youtu.be/fJ_ybnJowxs アスリート解体新書 (2)ウエイトリフティング~宙を舞う力持ち 三村研で製作したオモチャ けん玉と同じ?!
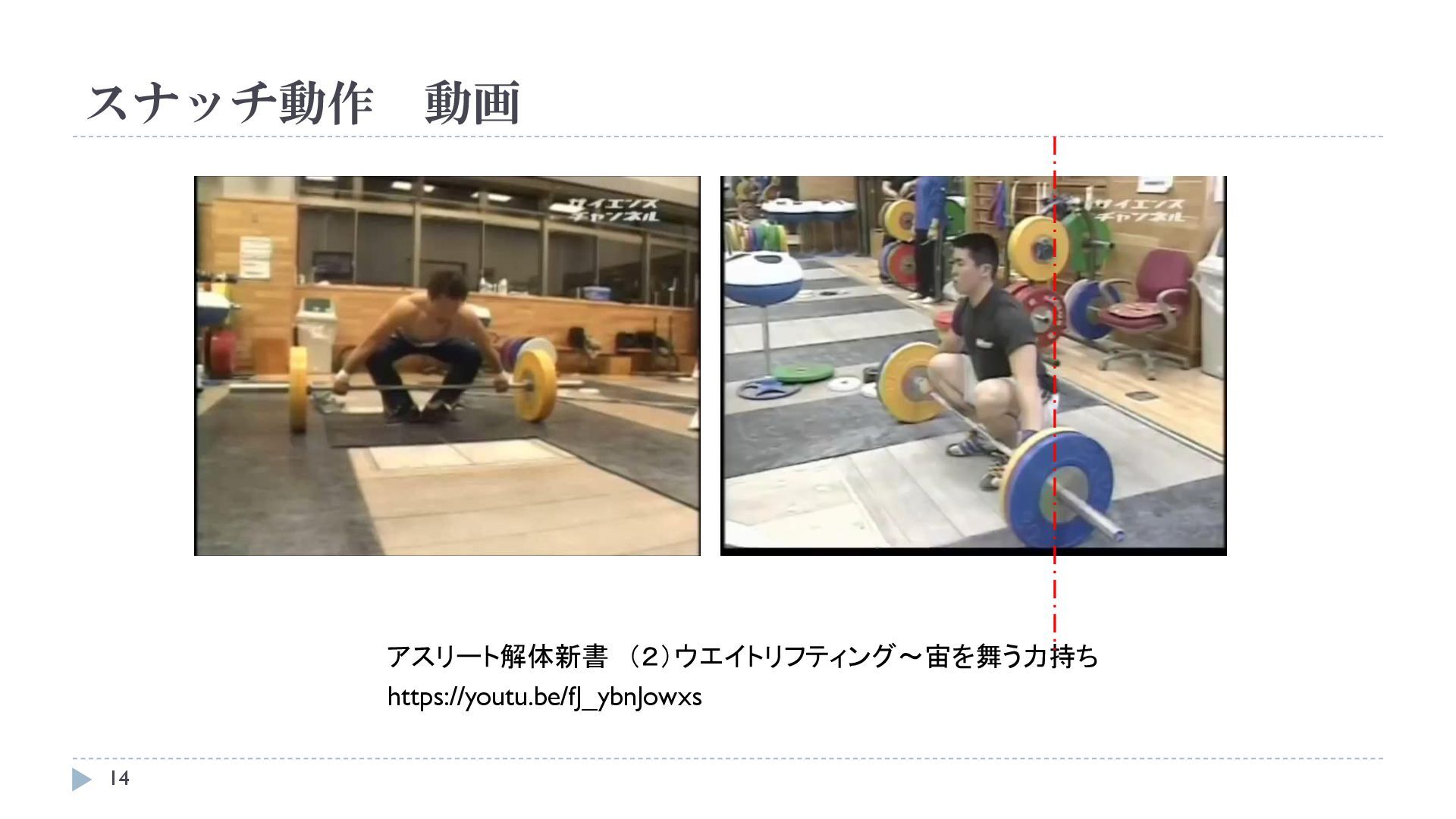
スナッチ動作 動画 14 https://youtu.be/fJ_ybnJowxs アスリート解体新書 (2)ウエイトリフティング~宙を舞う力持ち
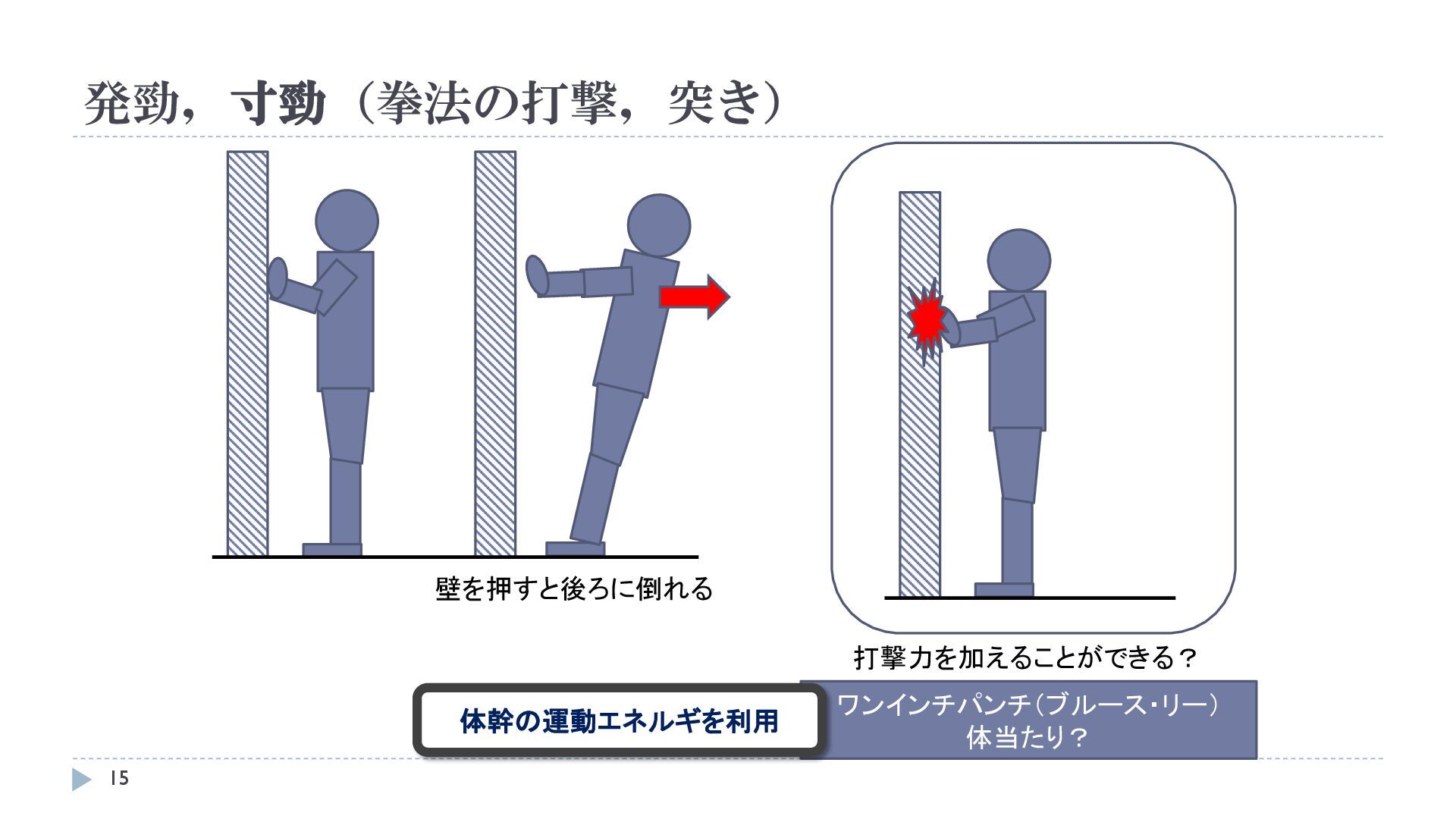
発勁,寸勁(拳法の打撃,突き) 15 壁を押すと後ろに倒れる 打撃力を加えることができる? ワンインチパンチ(ブルース・リー) 体当たり? 体幹の運動エネルギを利用
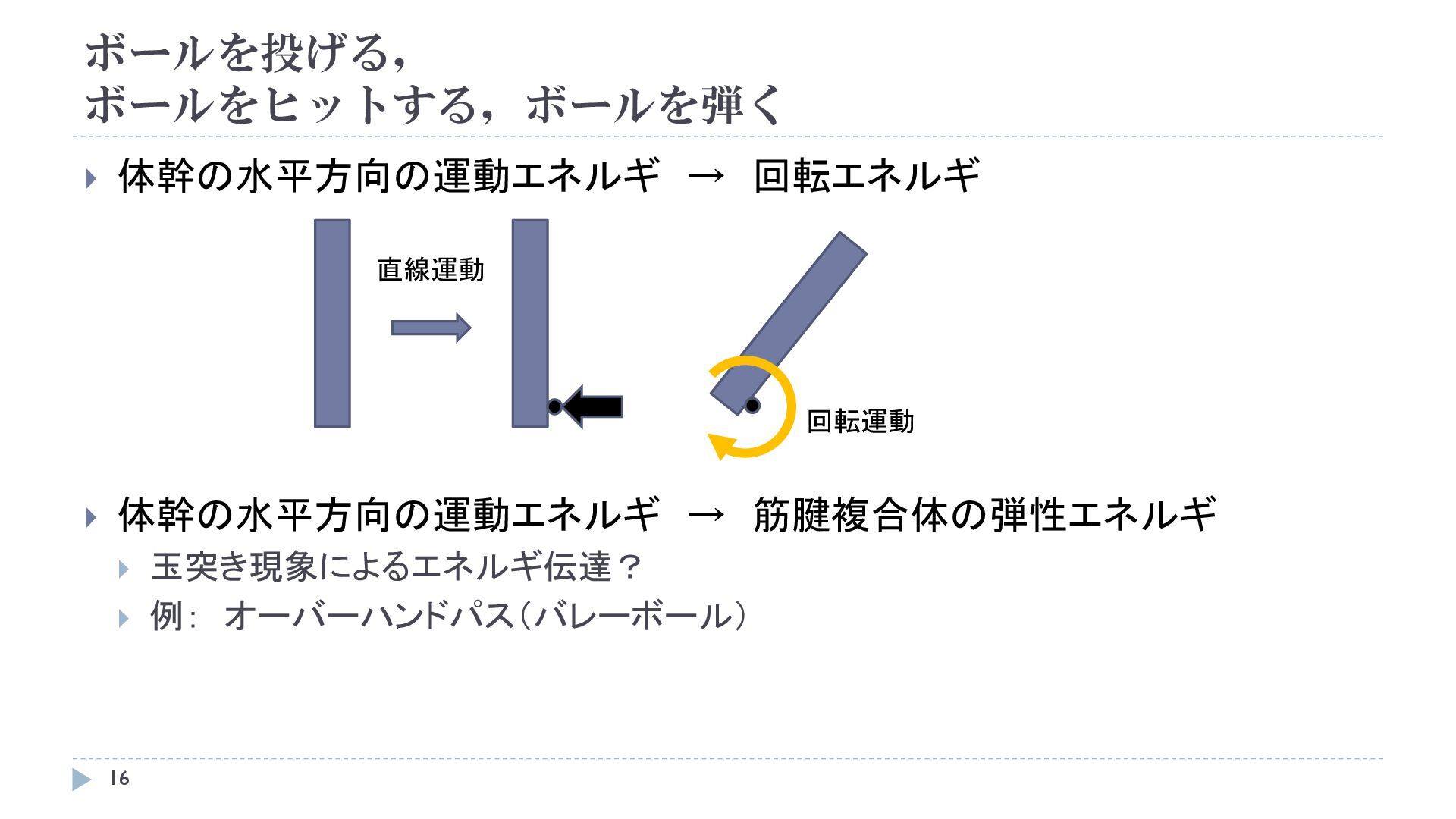
ボールを投げる, ボールをヒットする,ボールを弾く 16 体幹の水平方向の運動エネルギ → 回転エネルギ 体幹の水平方向の運動エネルギ →
筋腱複合体の弾性エネルギ 玉突き現象によるエネルギ伝達? 例: オーバーハンドパス(バレーボール) 回転運動 直線運動
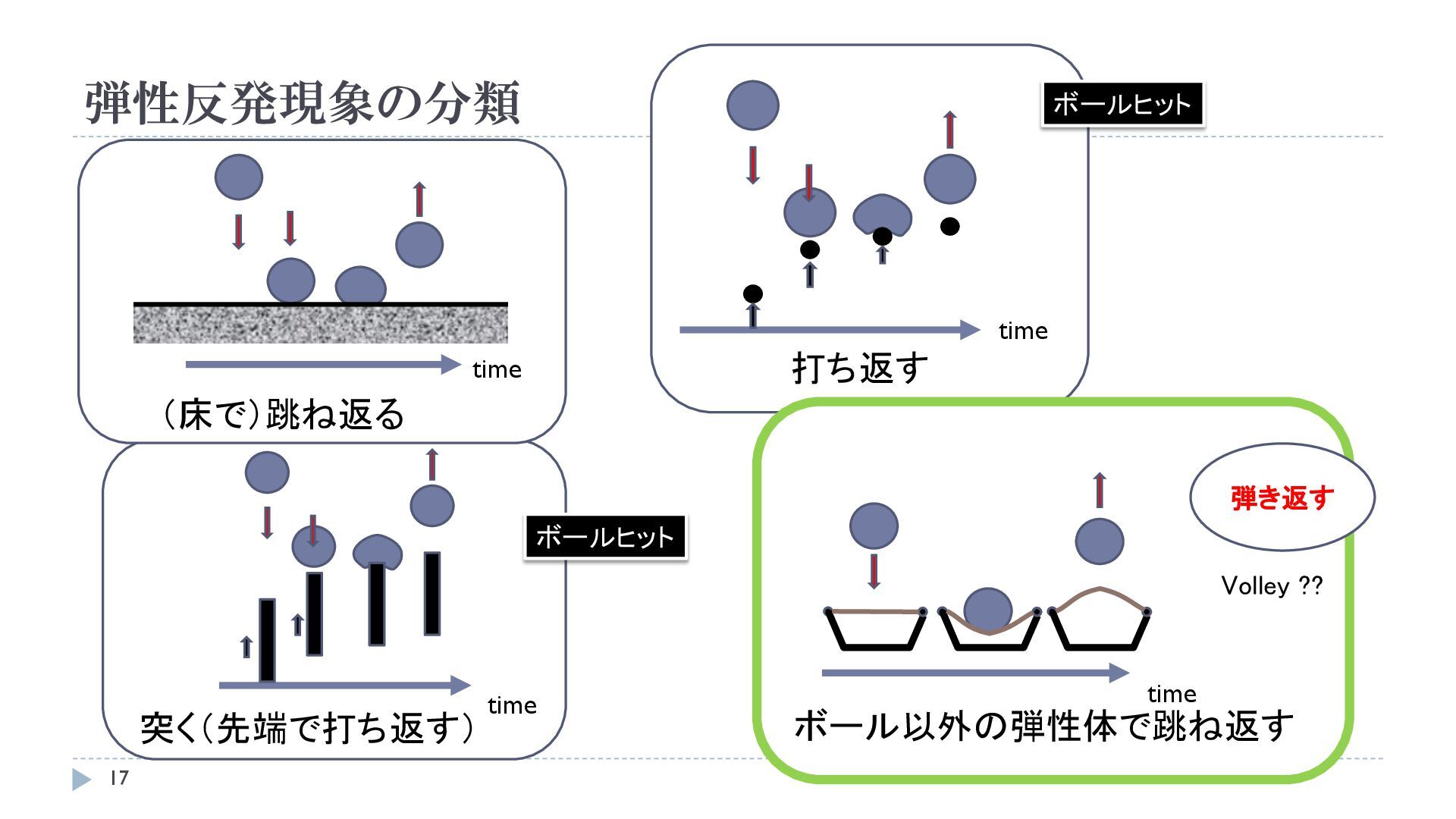
弾性反発現象の分類 17 time time time (床で)跳ね返る 打ち返す 突く(先端で打ち返す) time ボール以外の弾性体で跳ね返す
弾き返す Volley ?? ボールヒット ボールヒット
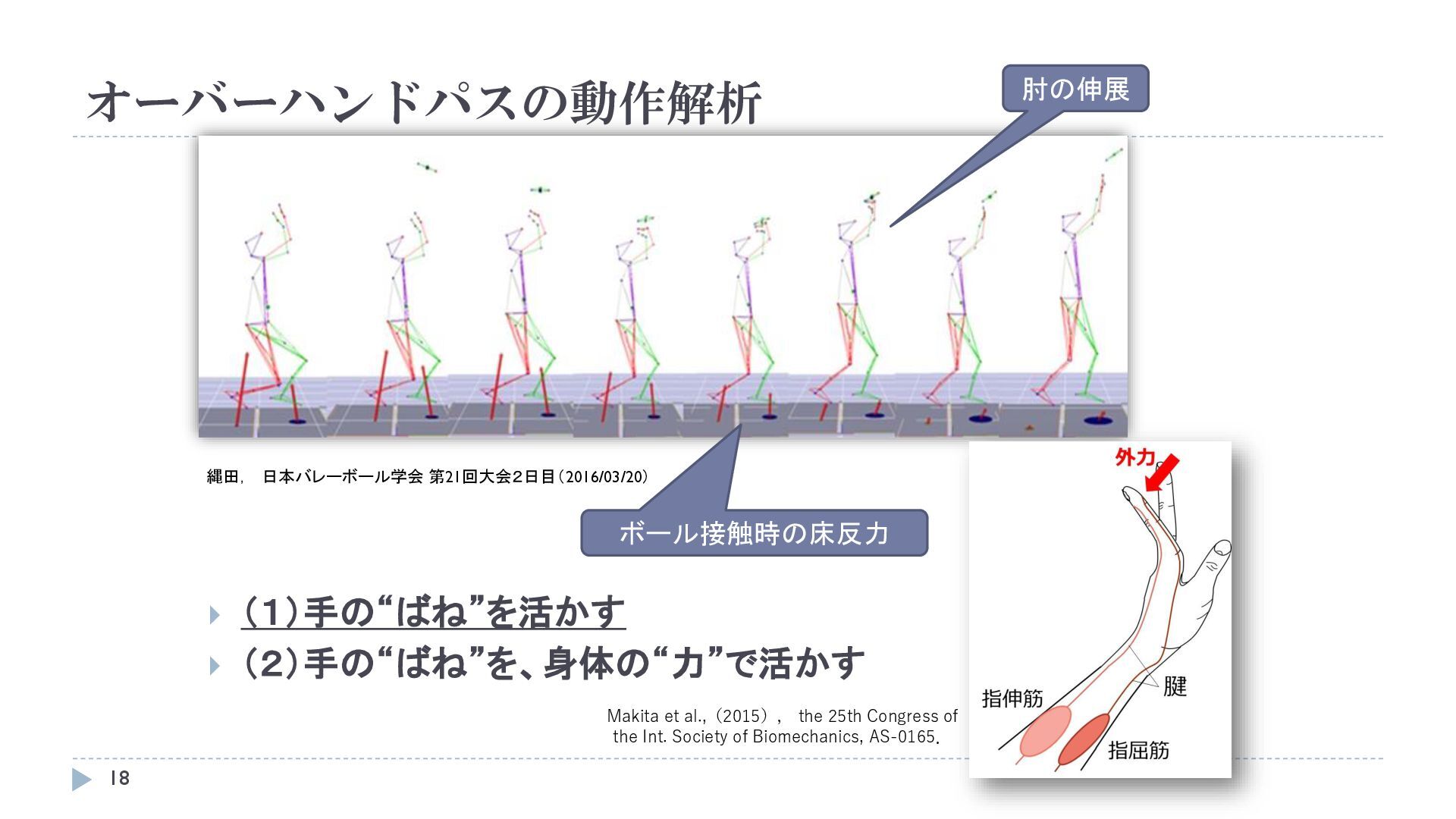
オーバーハンドパスの動作解析 18 (1)手の“ばね”を活かす (2)手の“ばね”を、身体の“力”で活かす Makita et al.,(2015), the
25th Congress of the Int. Society of Biomechanics, AS-0165. ボール接触時の床反力 縄田, 日本バレーボール学会 第21回大会2日目(2016/03/20) 肘の伸展
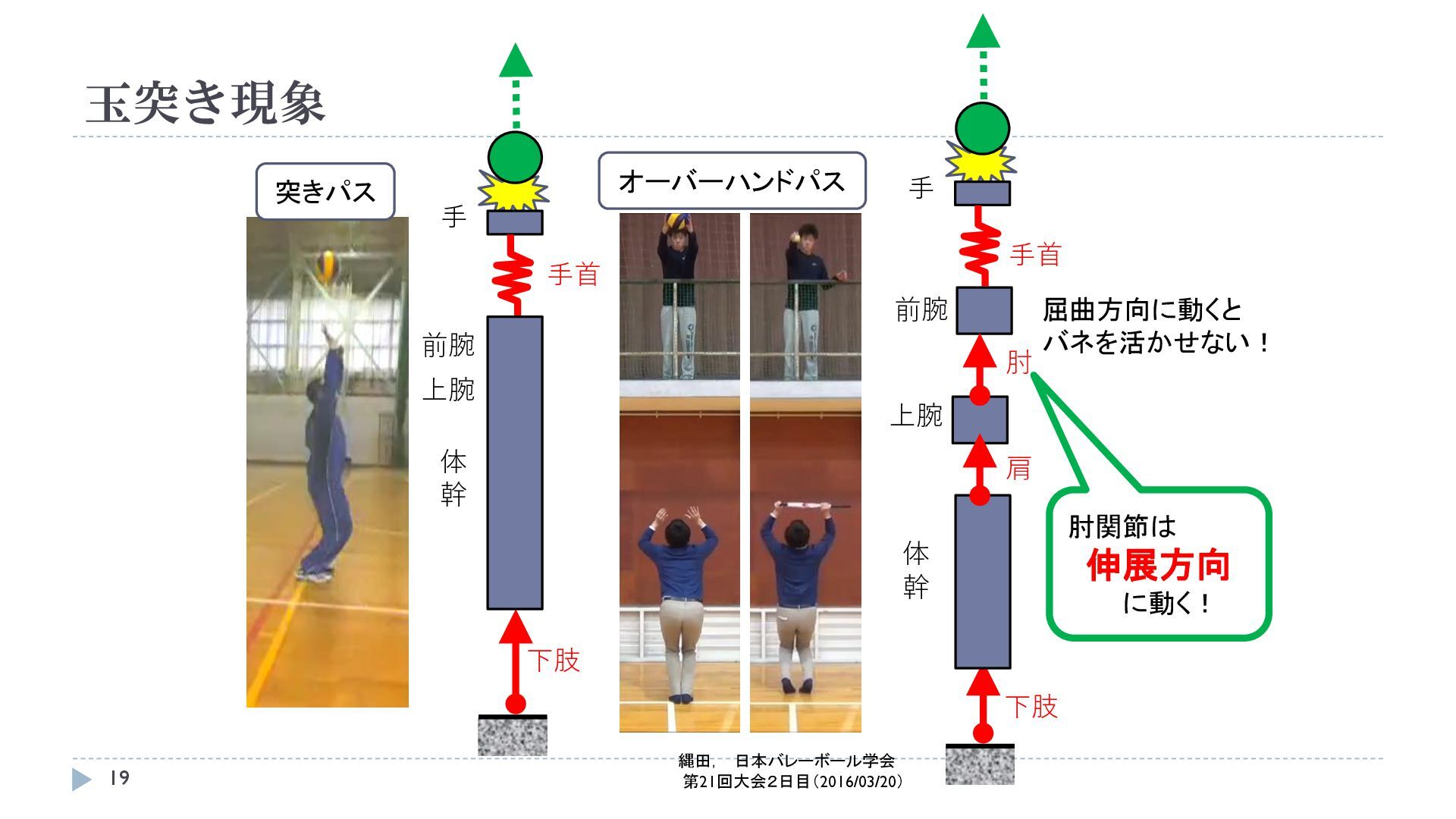
玉突き現象 19 手 体 幹 下肢 上腕 前腕 手首 縄田,
日本バレーボール学会 第21回大会2日目(2016/03/20) 突きパス オーバーハンドパス 手 体 幹 下肢 上腕 前腕 手首 肘 肩 肘関節は 伸展方向 に動く! 屈曲方向に動くと バネを活かせない!
まとめ 20 「動作原理」 力学現象として発生しうること 力学現象として発生させたいこと 注意深く観察し, 「目標設定」する
「環境設定」 有効な試行錯誤が繰り返される環境づくり. 周りの人間は,動作する本人が試行錯誤するための「お手伝 い」しかできない. 「無理やり教える」,「無理やり動作介入する」,..は,弊害しかない
2.ゲームの記録,分析,評価 21
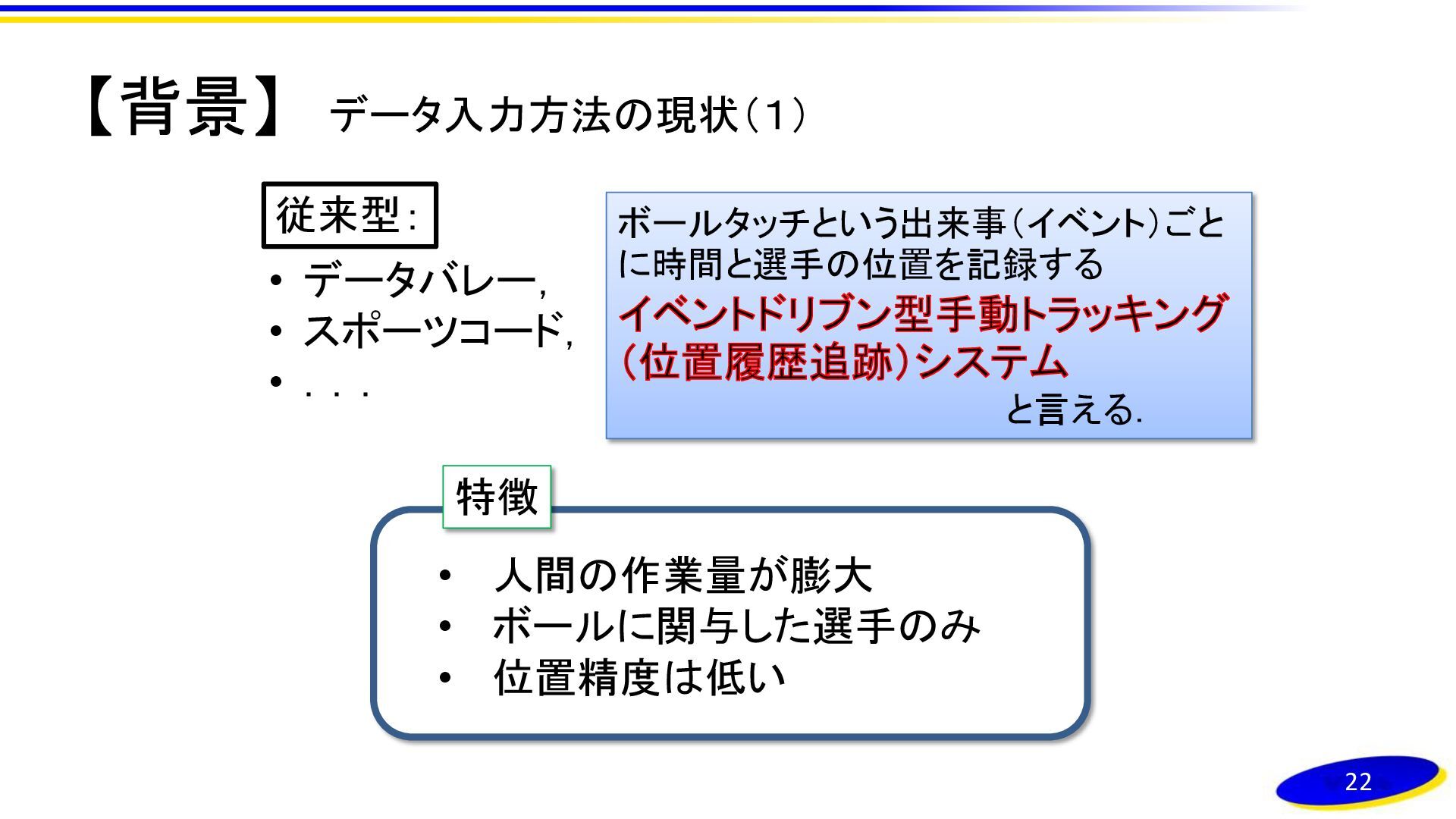
【背景】 データ入力方法の現状(1) • データバレー, • スポーツコード, • ... ボールタッチという出来事(イベント)ごと に時間と選手の位置を記録する
と言える. • 人間の作業量が膨大 • ボールに関与した選手のみ • 位置精度は低い 特徴 従来型: 22
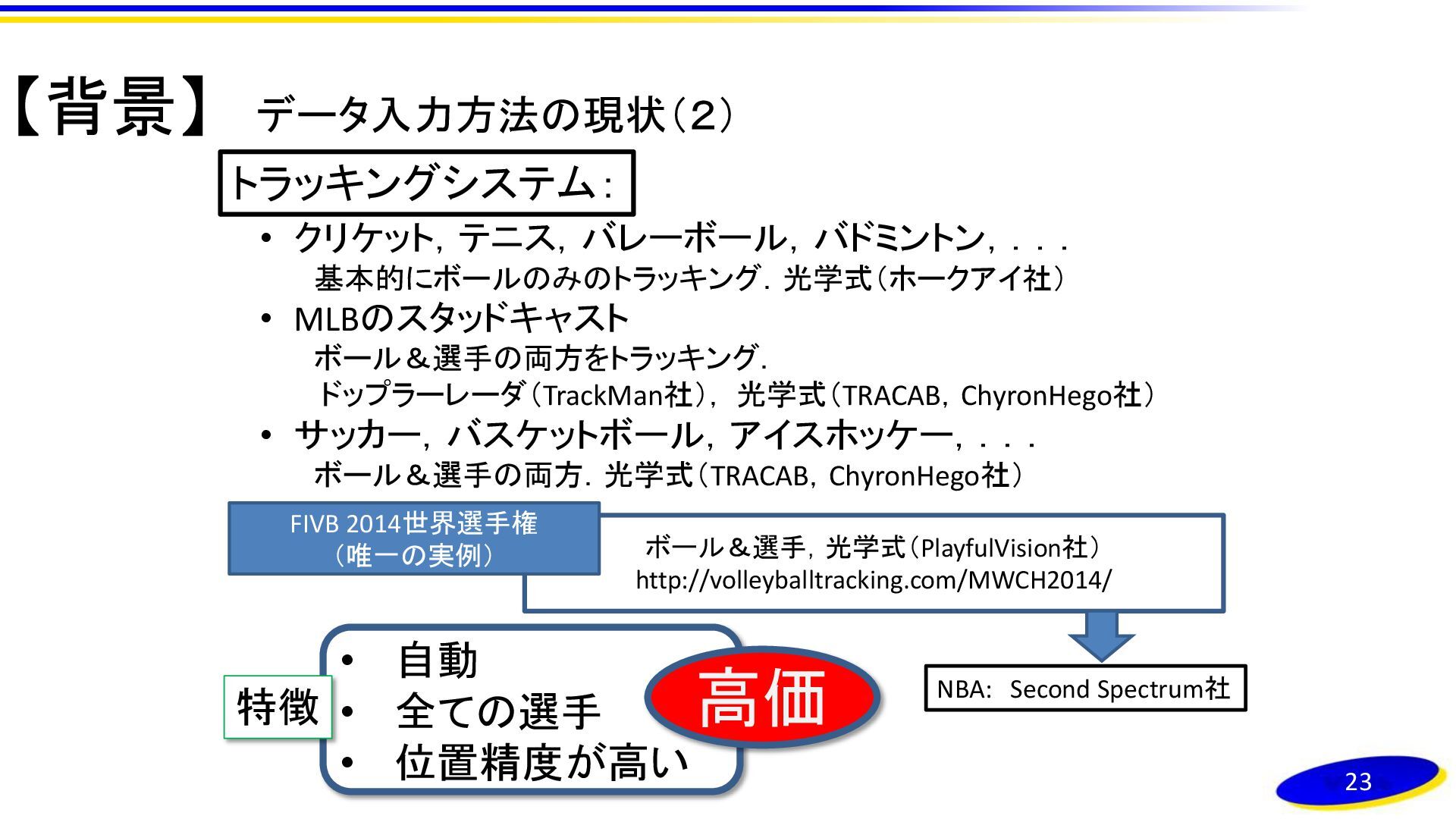
ボール&選手,光学式(PlayfulVision社) http://volleyballtracking.com/MWCH2014/ 23 【背景】 データ入力方法の現状(2) • クリケット,テニス,バレーボール,バドミントン,... 基本的にボールのみのトラッキング.光学式(ホークアイ社) • MLBのスタッドキャスト
ボール&選手の両方をトラッキング. ドップラーレーダ(TrackMan社), 光学式(TRACAB,ChyronHego社) • サッカー,バスケットボール,アイスホッケー,... ボール&選手の両方.光学式(TRACAB,ChyronHego社) トラッキングシステム: FIVB 2014世界選手権 (唯一の実例) NBA: Second Spectrum社 特徴 • 自動 • 全ての選手 • 位置精度が高い 高価
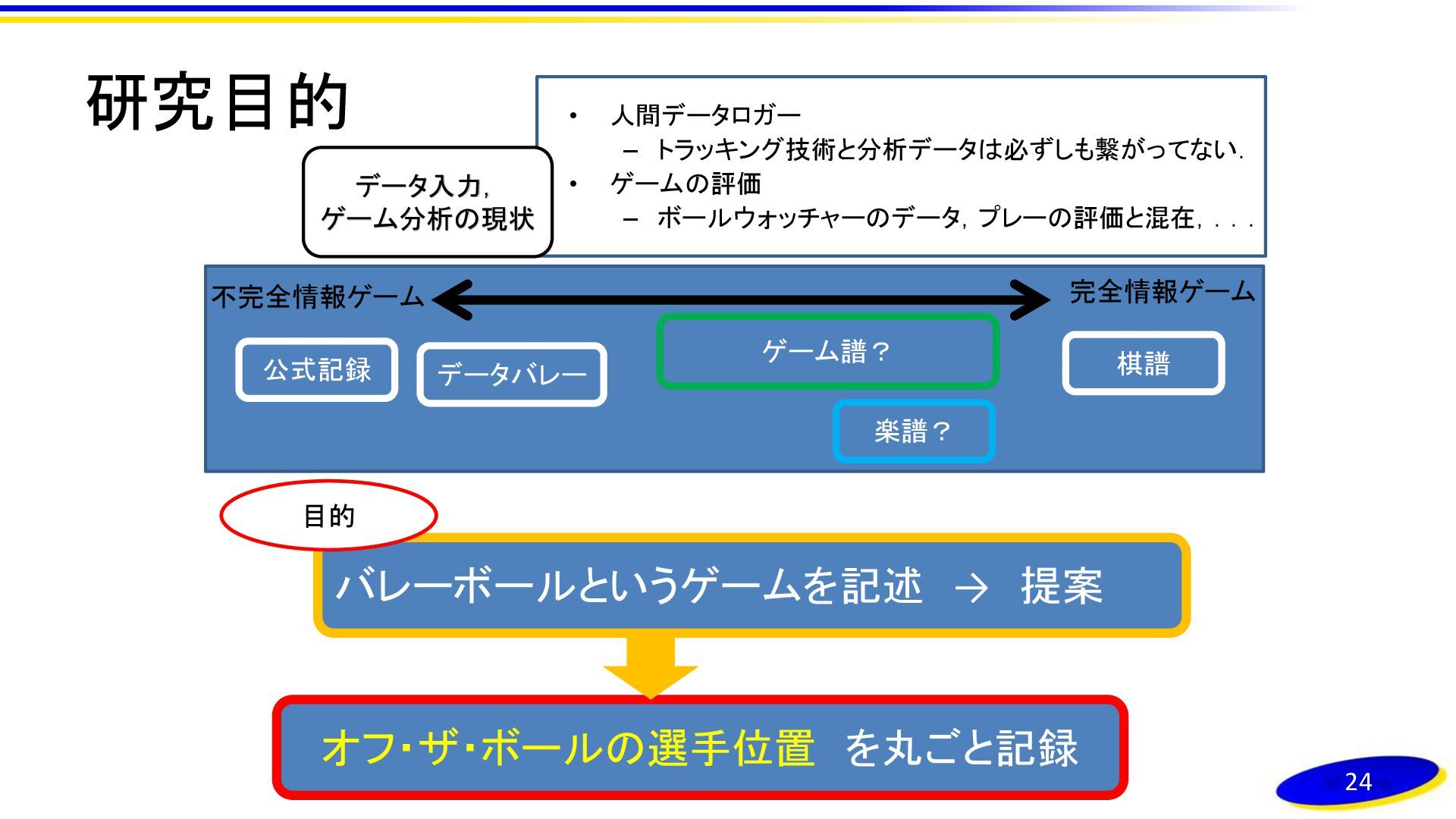
研究目的 24 • 人間データロガー – トラッキング技術と分析データは必ずしも繋がってない. • ゲームの評価 – ボールウォッチャーのデータ,プレーの評価と混在,...
不完全情報ゲーム 完全情報ゲーム 棋譜 楽譜? ゲーム譜? 公式記録 データバレー バレーボールというゲームを記述 → 提案 目的 データ入力, ゲーム分析の現状 オフ・ザ・ボールの選手位置 を丸ごと記録
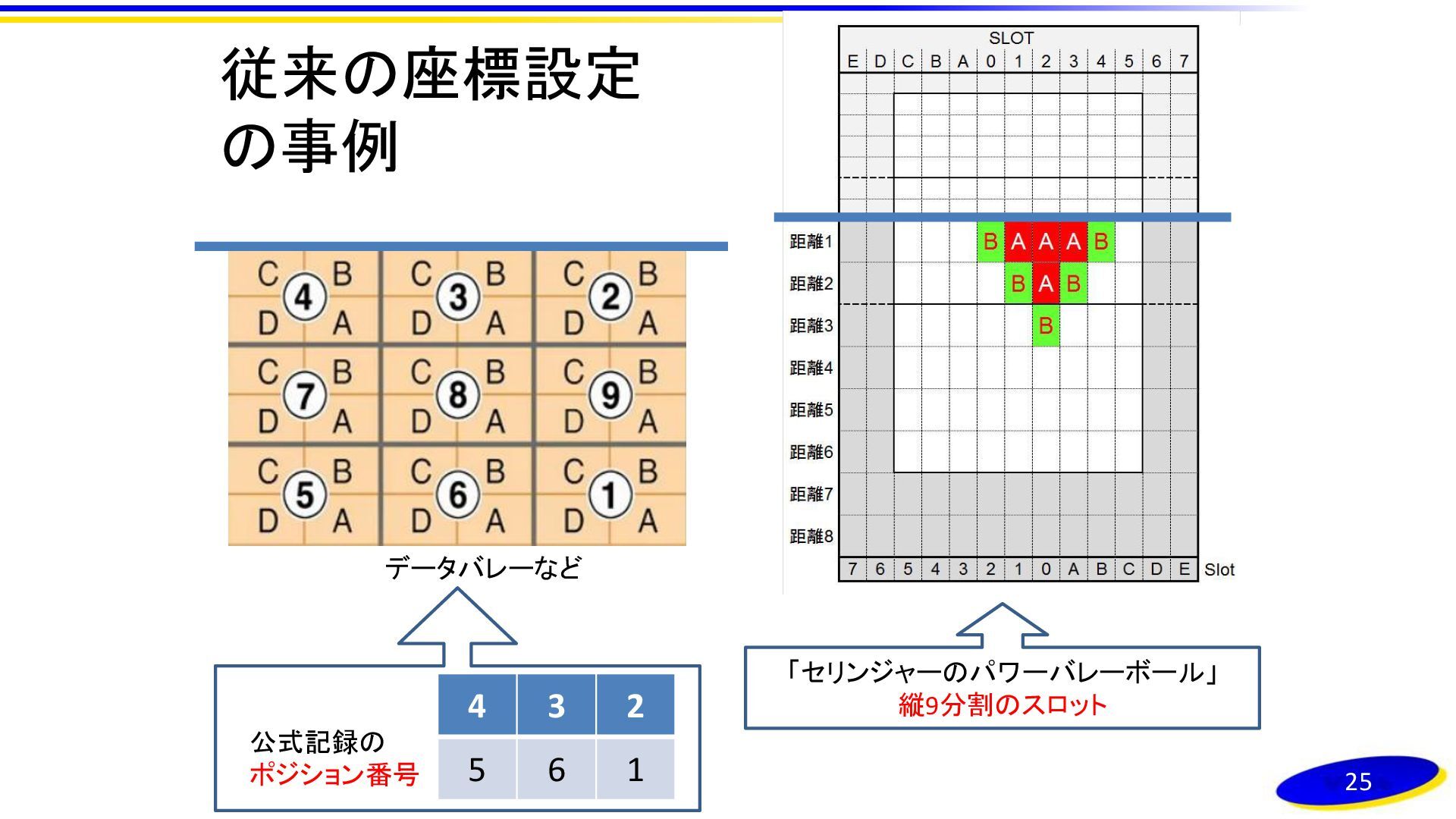
従来の座標設定 の事例 25 データバレーなど 4 3 2 5 6 1
公式記録の ポジション番号 「セリンジャーのパワーバレーボール」 縦9分割のスロット
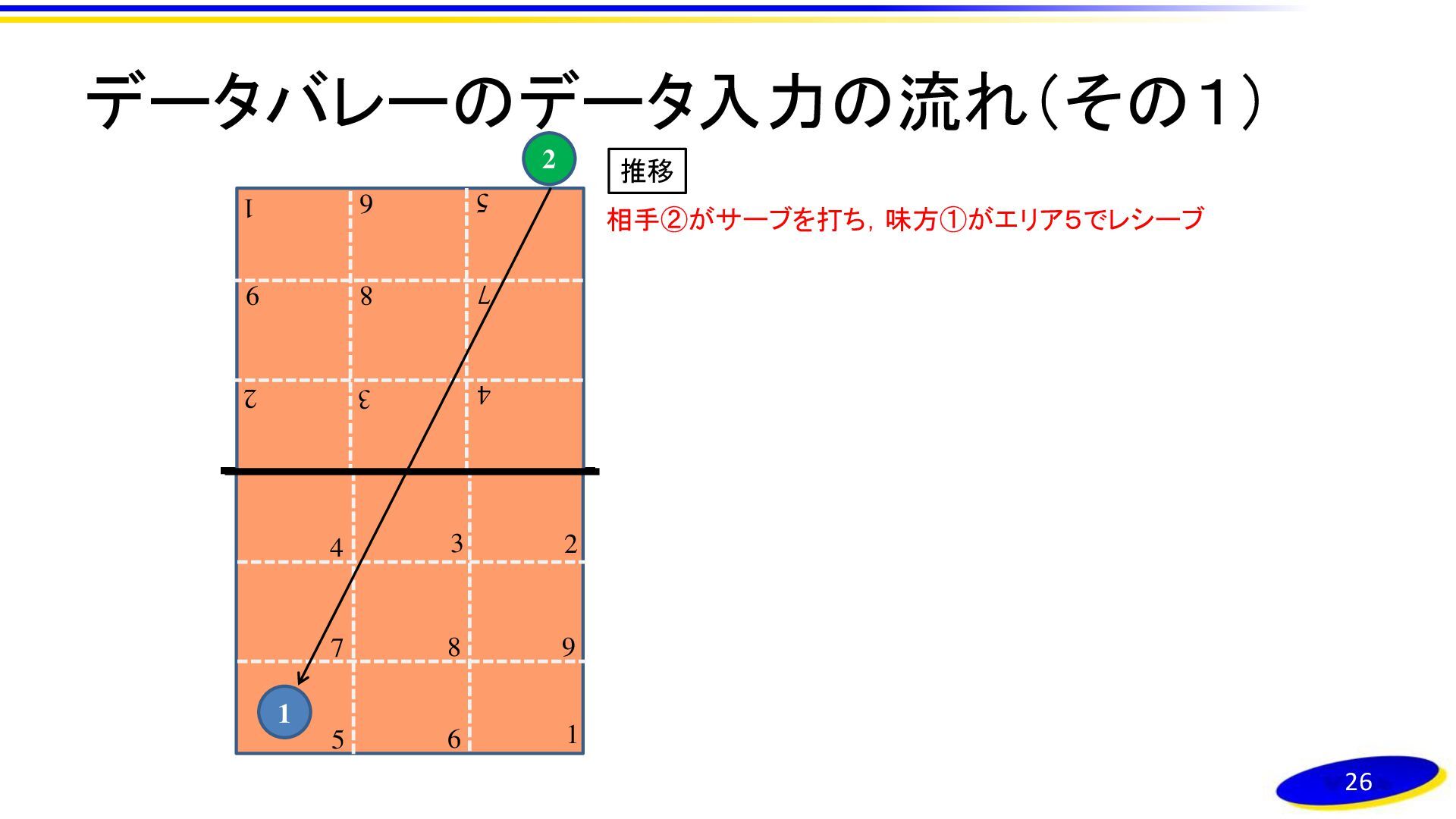
データバレーのデータ入力の流れ(その1) 26 推移 サーブ 1 2 4 3 5 6
7 8 9 1 2 4 3 5 6 7 8 9 1 2 相手②がサーブを打ち,味方①がエリア5でレシーブ
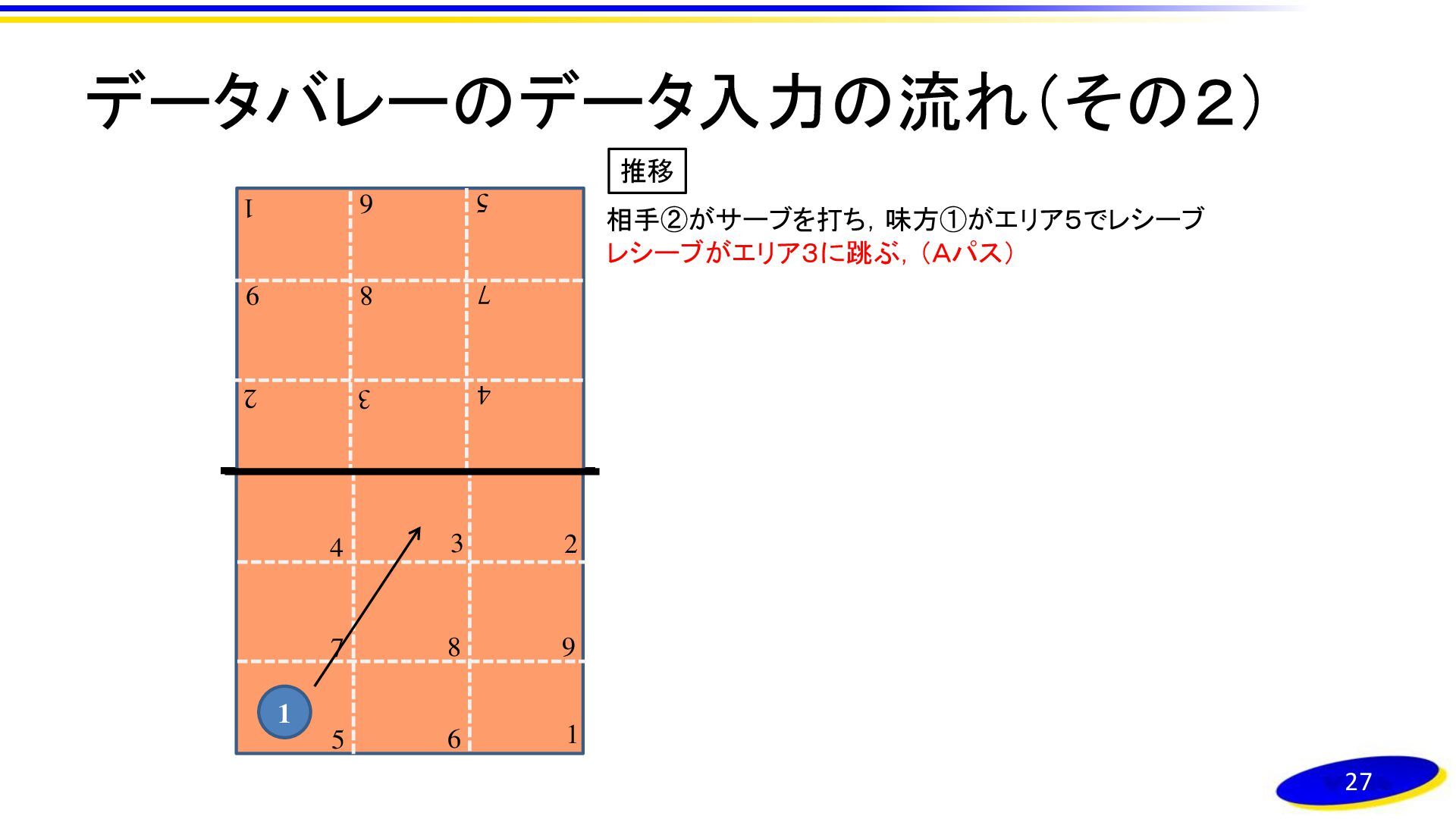
データバレーのデータ入力の流れ(その2) 27 推移 サーブ 1 2 4 3 5 6
7 8 9 1 2 4 3 5 6 7 8 9 1 相手②がサーブを打ち,味方①がエリア5でレシーブ レシーブがエリア3に跳ぶ,(Aパス)
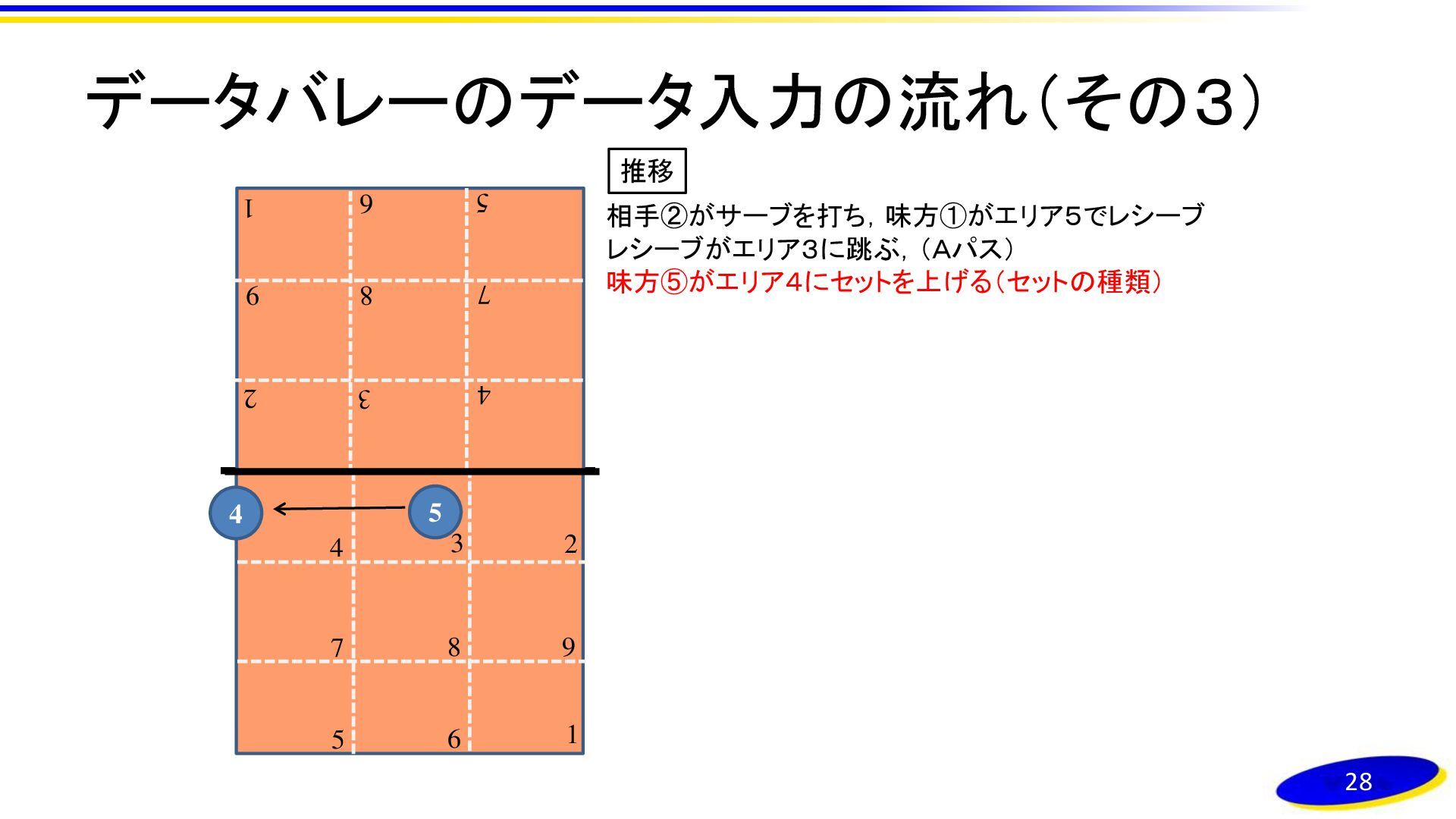
データバレーのデータ入力の流れ(その3) 28 推移 サーブ 1 2 4 3 5 6
7 8 9 1 2 4 3 5 6 7 8 9 5 相手②がサーブを打ち,味方①がエリア5でレシーブ レシーブがエリア3に跳ぶ,(Aパス) 味方⑤がエリア4にセットを上げる(セットの種類) 4
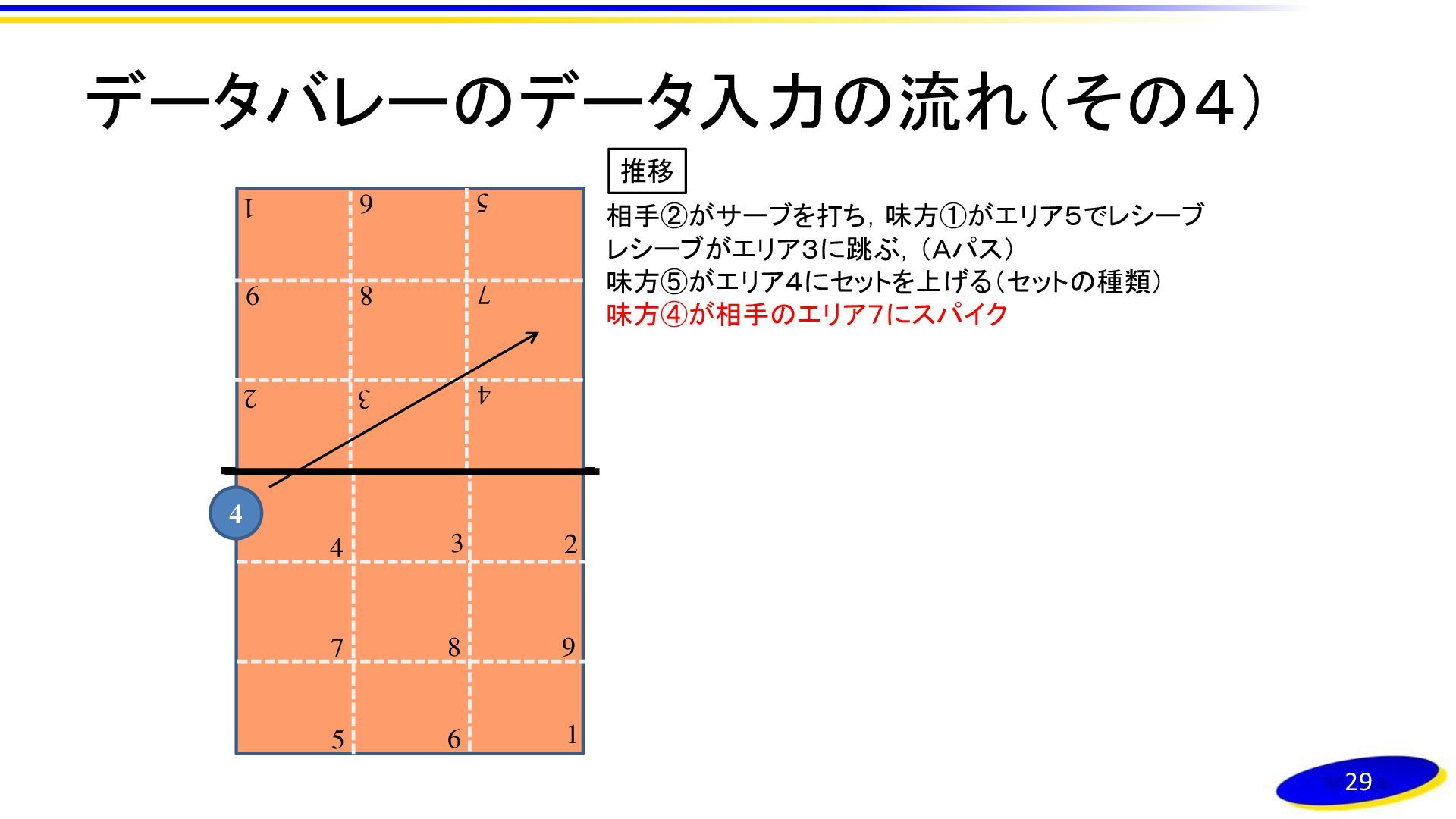
データバレーのデータ入力の流れ(その4) 29 推移 サーブ 1 2 4 3 5 6
7 8 9 1 2 4 3 5 6 7 8 9 相手②がサーブを打ち,味方①がエリア5でレシーブ レシーブがエリア3に跳ぶ,(Aパス) 味方⑤がエリア4にセットを上げる(セットの種類) 味方④が相手のエリア7にスパイク 4
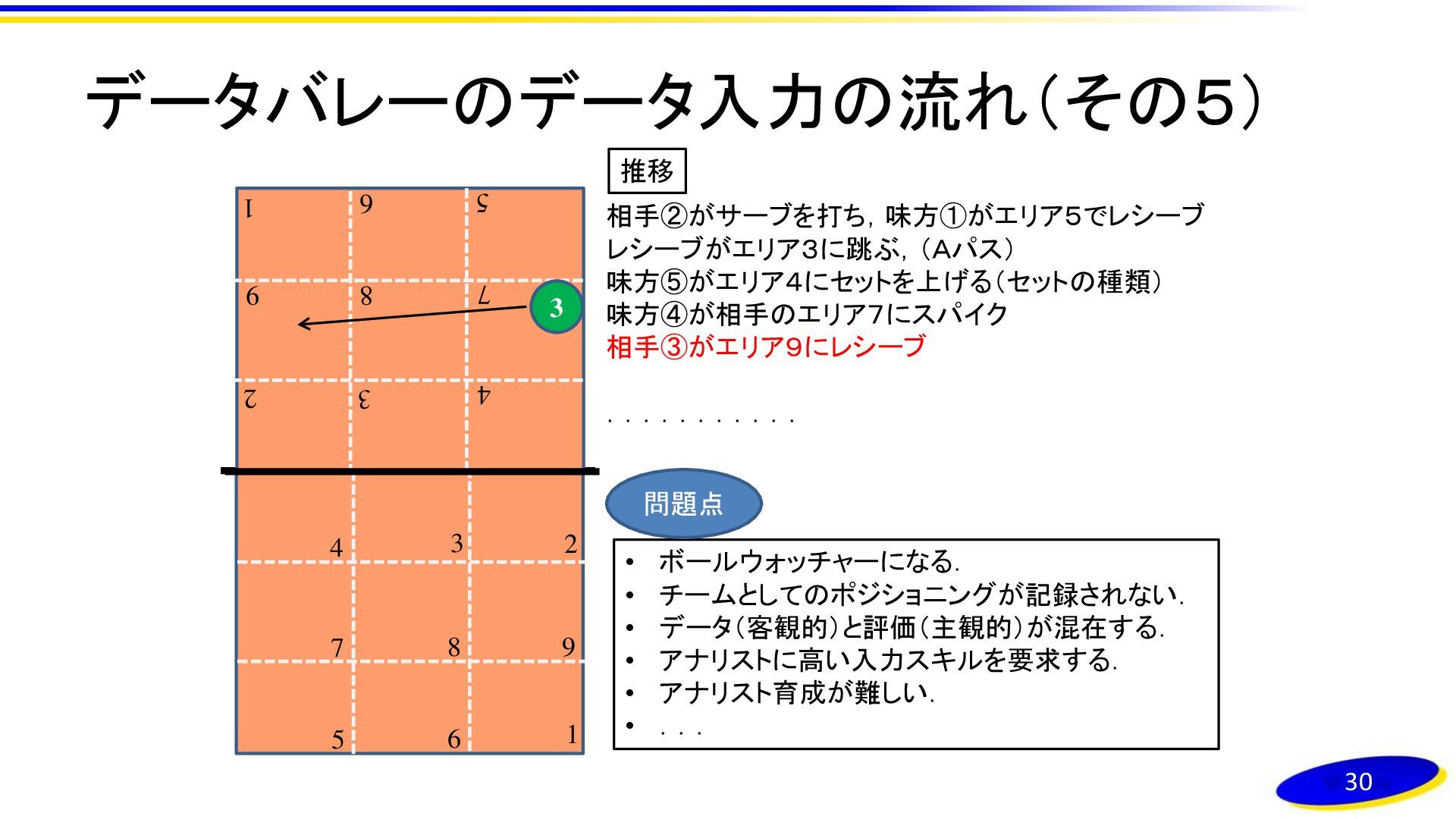
データバレーのデータ入力の流れ(その5) 30 推移 サーブ 1 2 4 3 5 6
7 8 9 1 2 4 3 5 6 7 8 9 相手②がサーブを打ち,味方①がエリア5でレシーブ レシーブがエリア3に跳ぶ,(Aパス) 味方⑤がエリア4にセットを上げる(セットの種類) 味方④が相手のエリア7にスパイク 相手③がエリア9にレシーブ ........... 3 • ボールウォッチャーになる. • チームとしてのポジショニングが記録されない. • データ(客観的)と評価(主観的)が混在する. • アナリストに高い入力スキルを要求する. • アナリスト育成が難しい. • ... 問題点
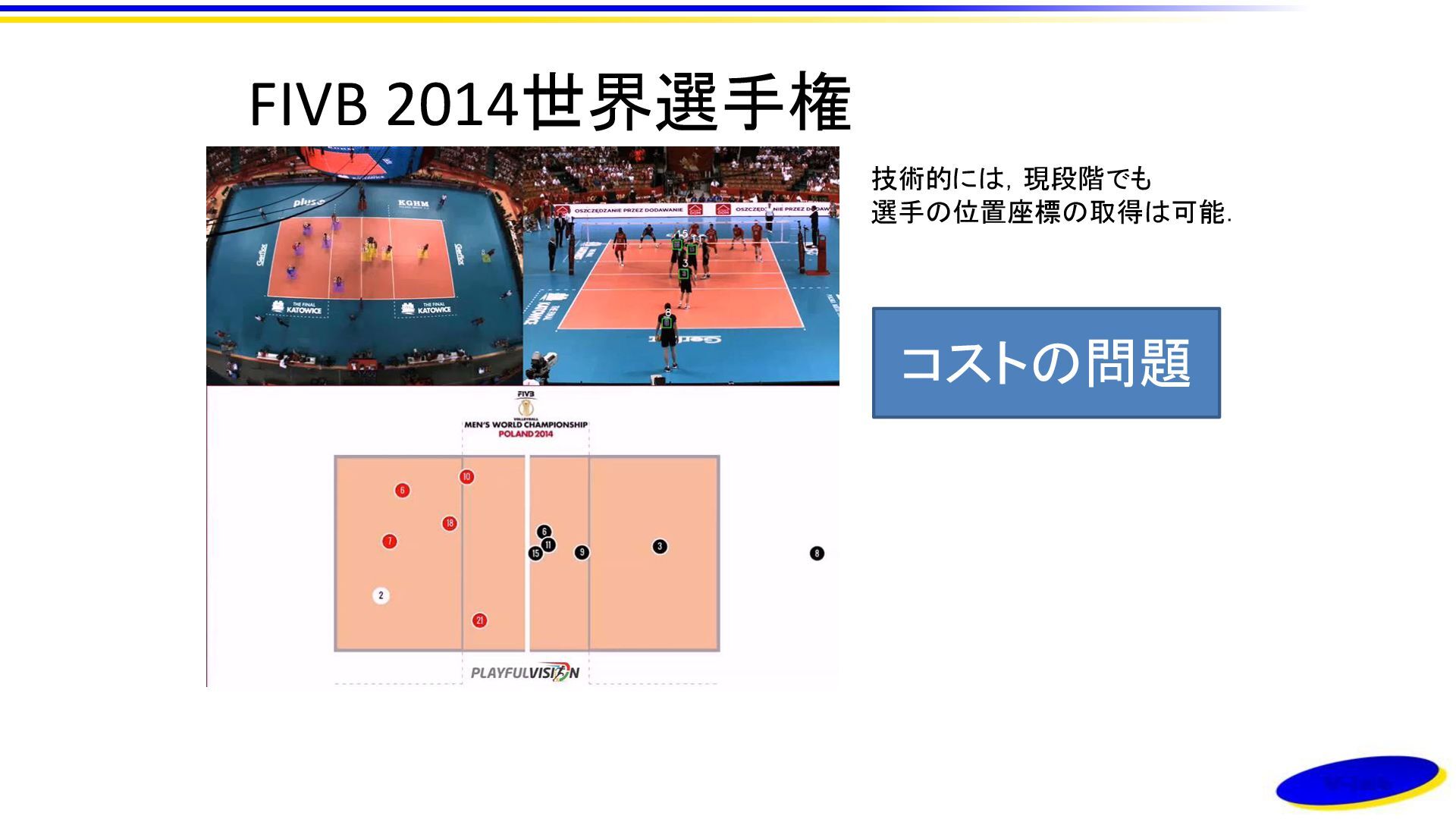
FIVB 2014世界選手権 31 技術的には,現段階でも 選手の位置座標の取得は可能. コストの問題
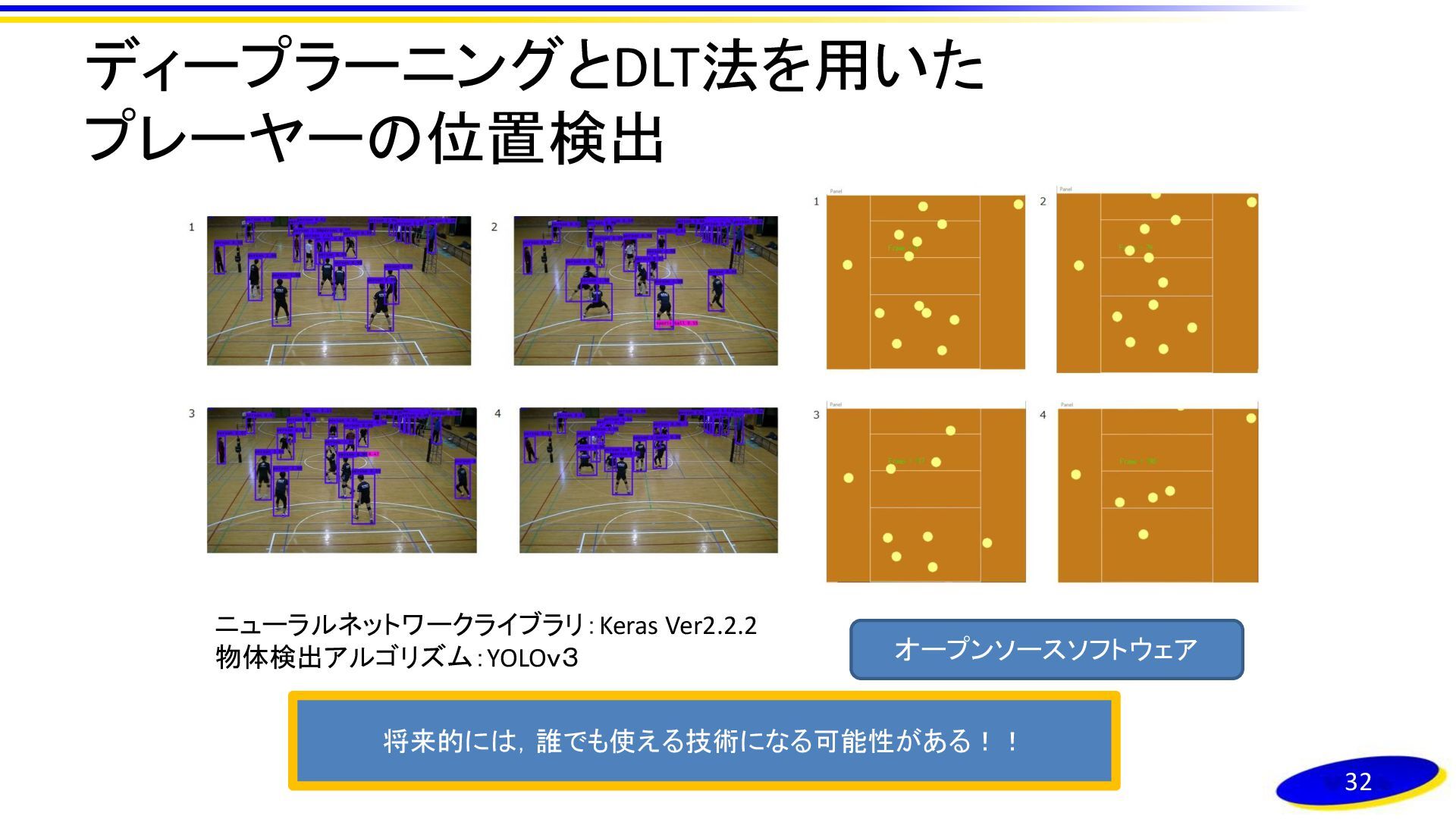
ディープラーニングとDLT法を用いた プレーヤーの位置検出 32 ニューラルネットワークライブラリ:Keras Ver2.2.2 物体検出アルゴリズム:YOLOv3 オープンソースソフトウェア 将来的には,誰でも使える技術になる可能性がある!!
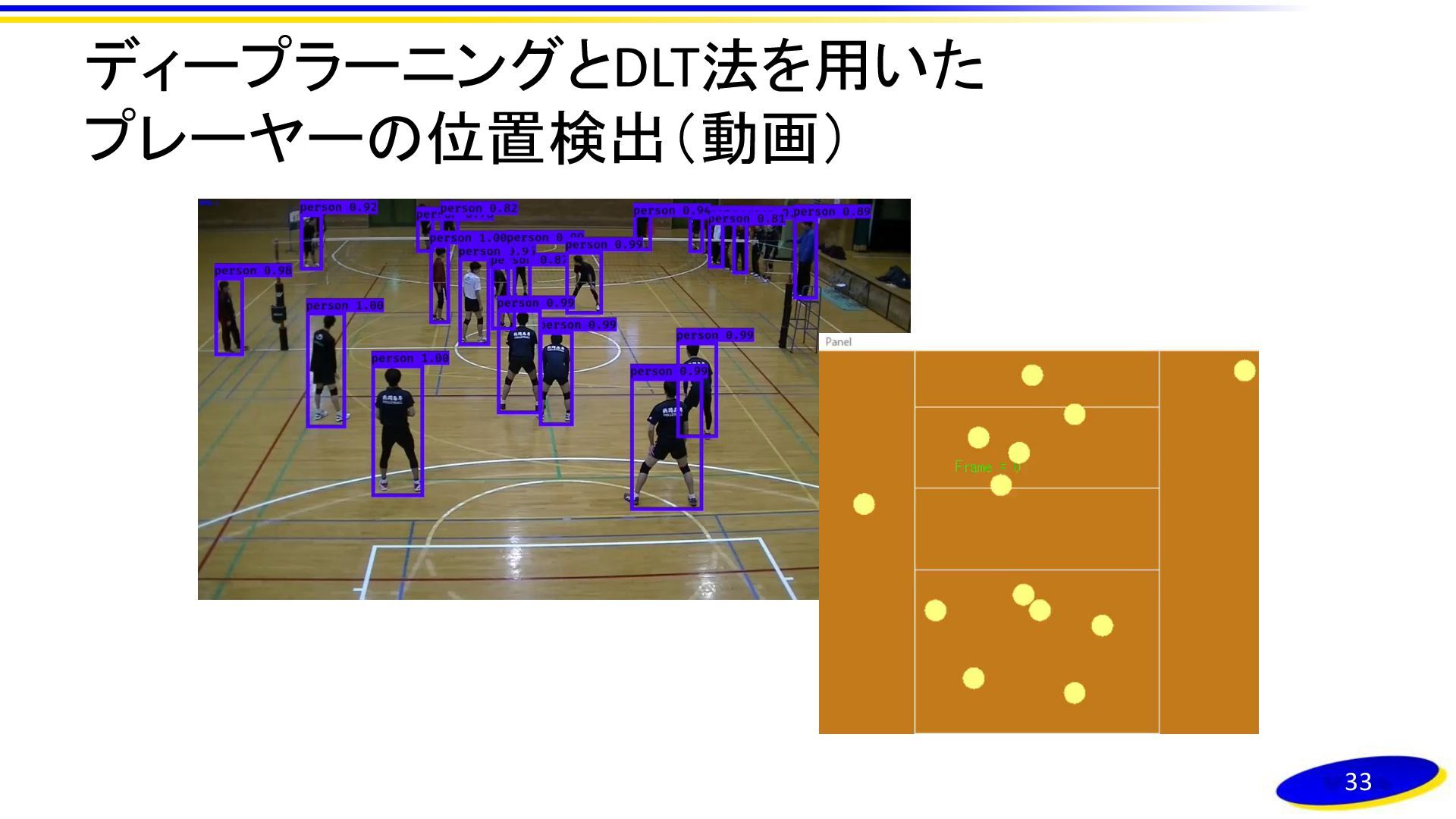
ディープラーニングとDLT法を用いた プレーヤーの位置検出(動画) 33
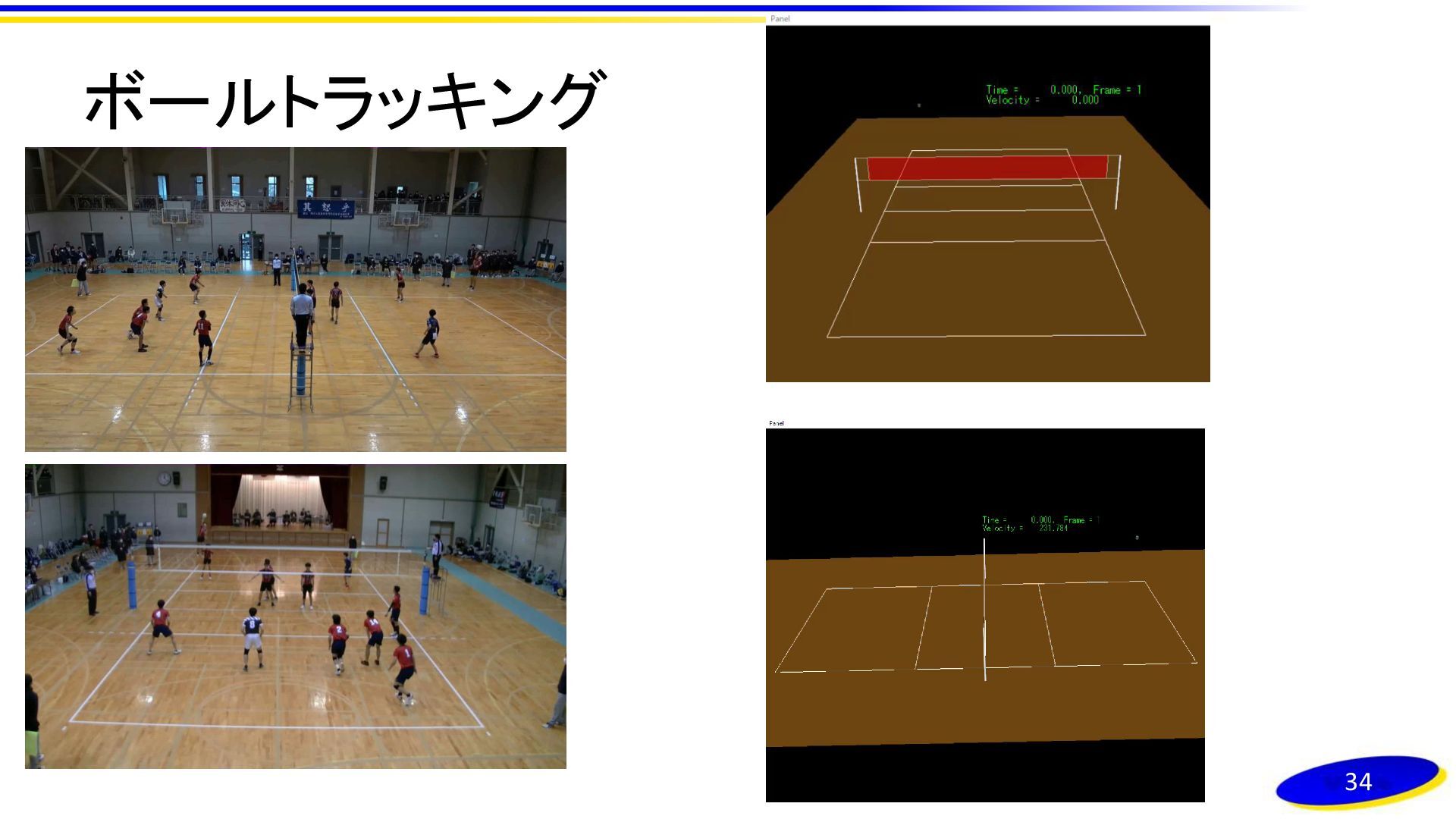
ボールトラッキング 34
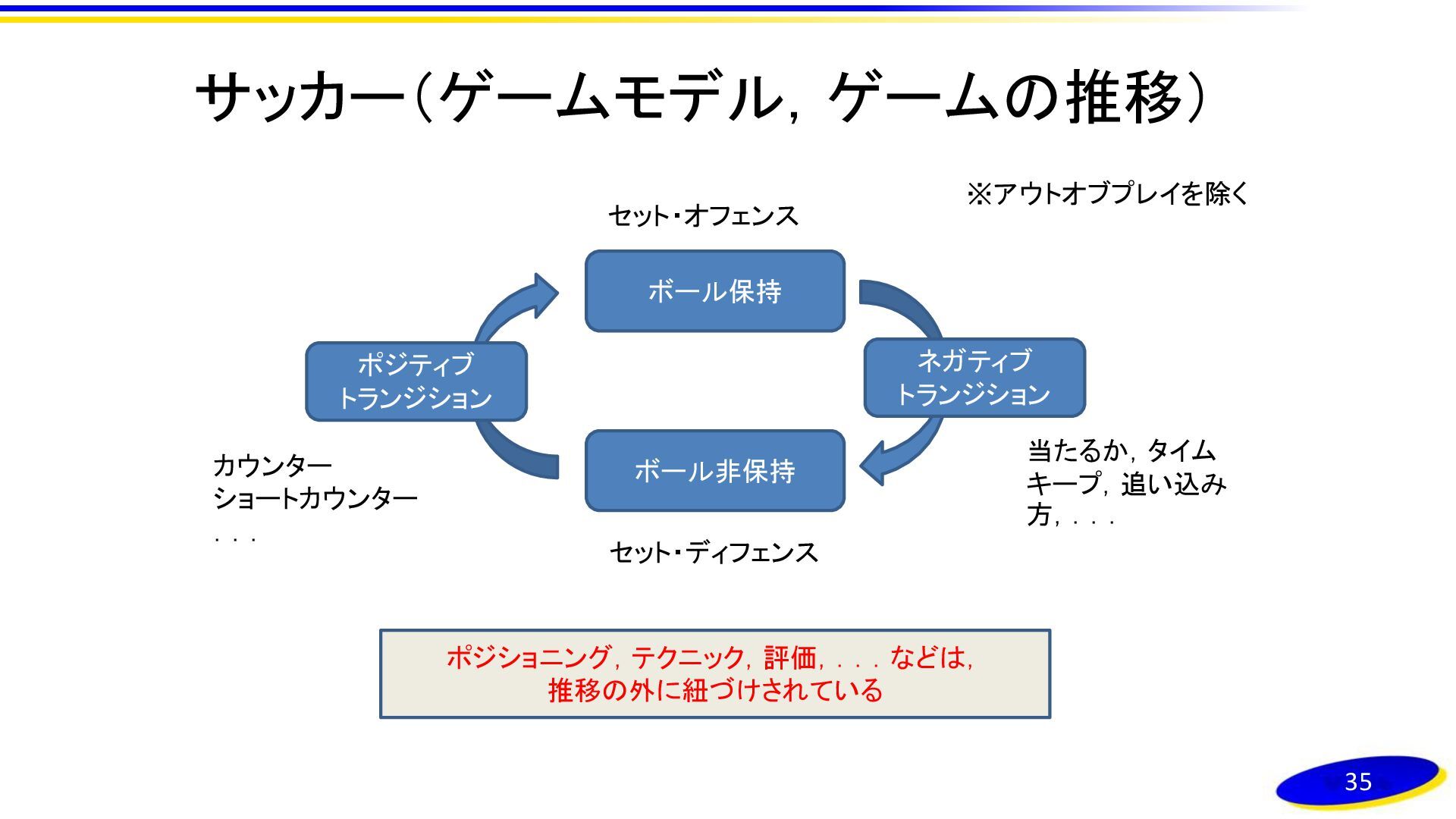
サッカー(ゲームモデル,ゲームの推移) 35 ボール保持 ボール非保持 ※アウトオブプレイを除く ポジティブ トランジション ネガティブ トランジション セット・オフェンス
セット・ディフェンス カウンター ショートカウンター ... 当たるか,タイム キープ,追い込み 方,... ポジショニング,テクニック,評価,...などは, 推移の外に紐づけされている
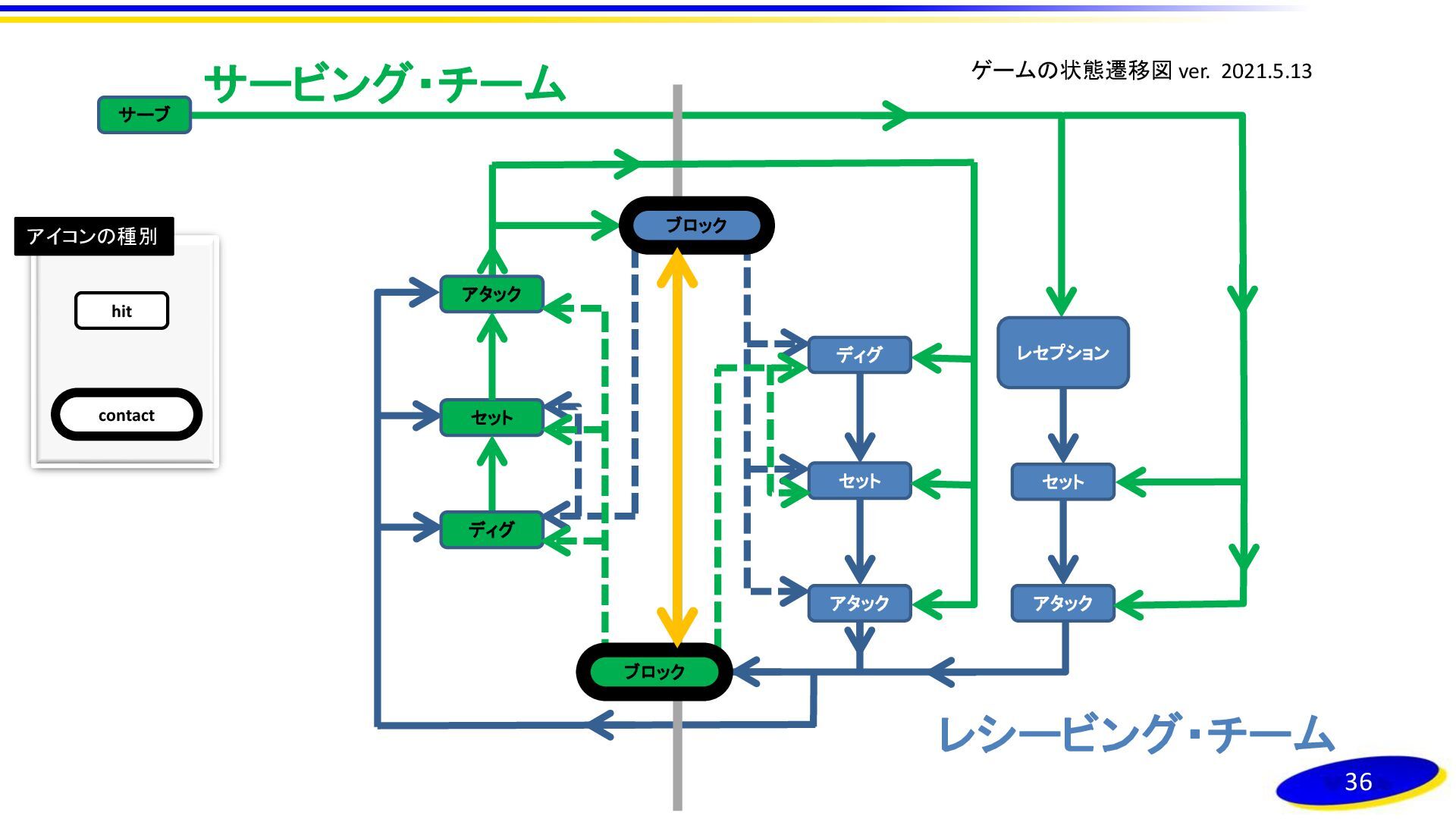
36 ゲームの状態遷移図 ver. 2021.5.13 サーブ セット セット アタック レセプション セット
サービング・チーム レシービング・チーム ブロック アタック アタック ディグ ブロック ディグ アイコンの種別 hit contact
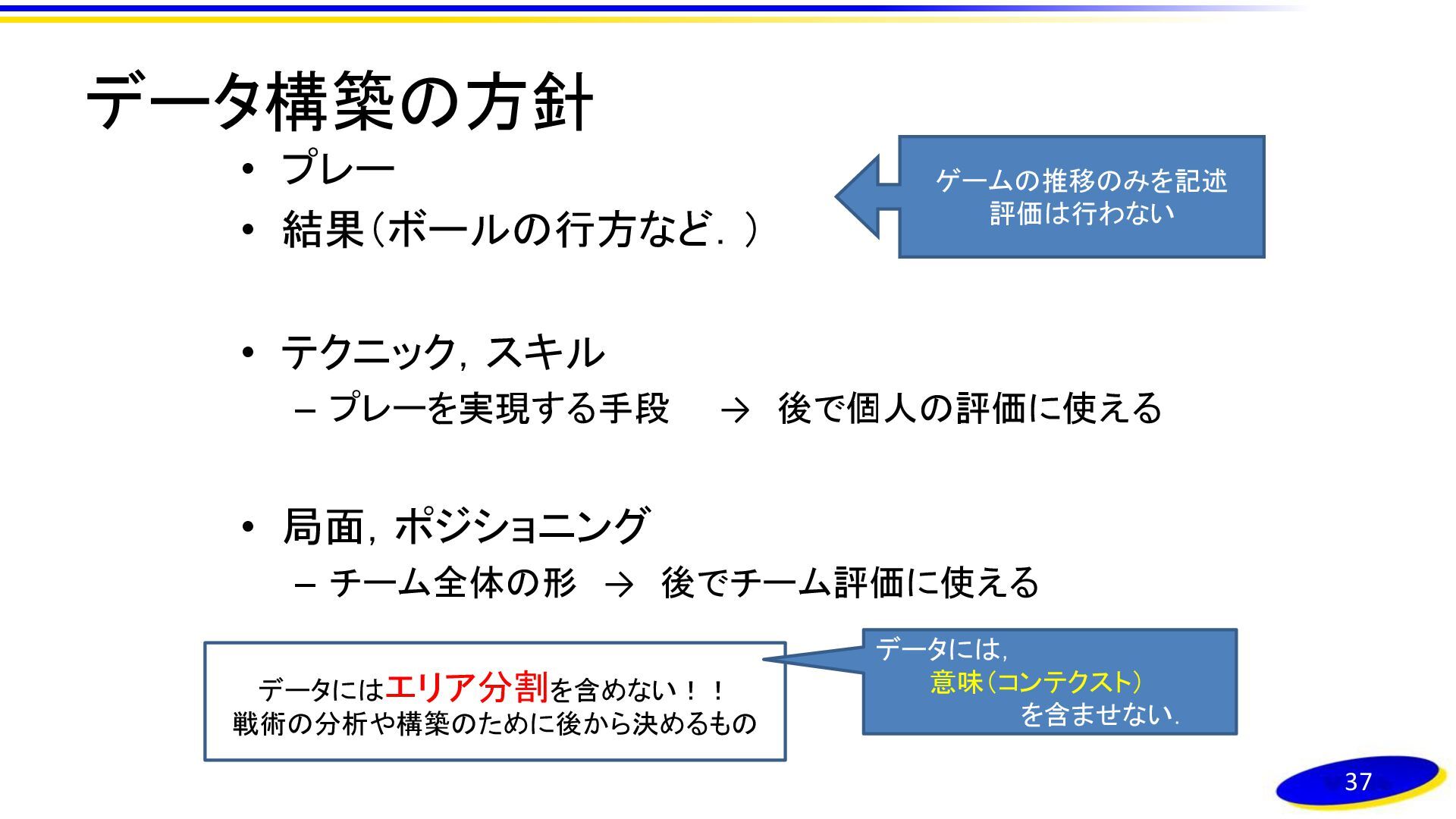
データ構築の方針 37 • プレー • 結果(ボールの行方など.) • テクニック,スキル – プレーを実現する手段
→ 後で個人の評価に使える • 局面,ポジショニング – チーム全体の形 → 後でチーム評価に使える ゲームの推移のみを記述 評価は行わない データにはエリア分割を含めない!! 戦術の分析や構築のために後から決めるもの データには, 意味(コンテクスト) を含ませない.
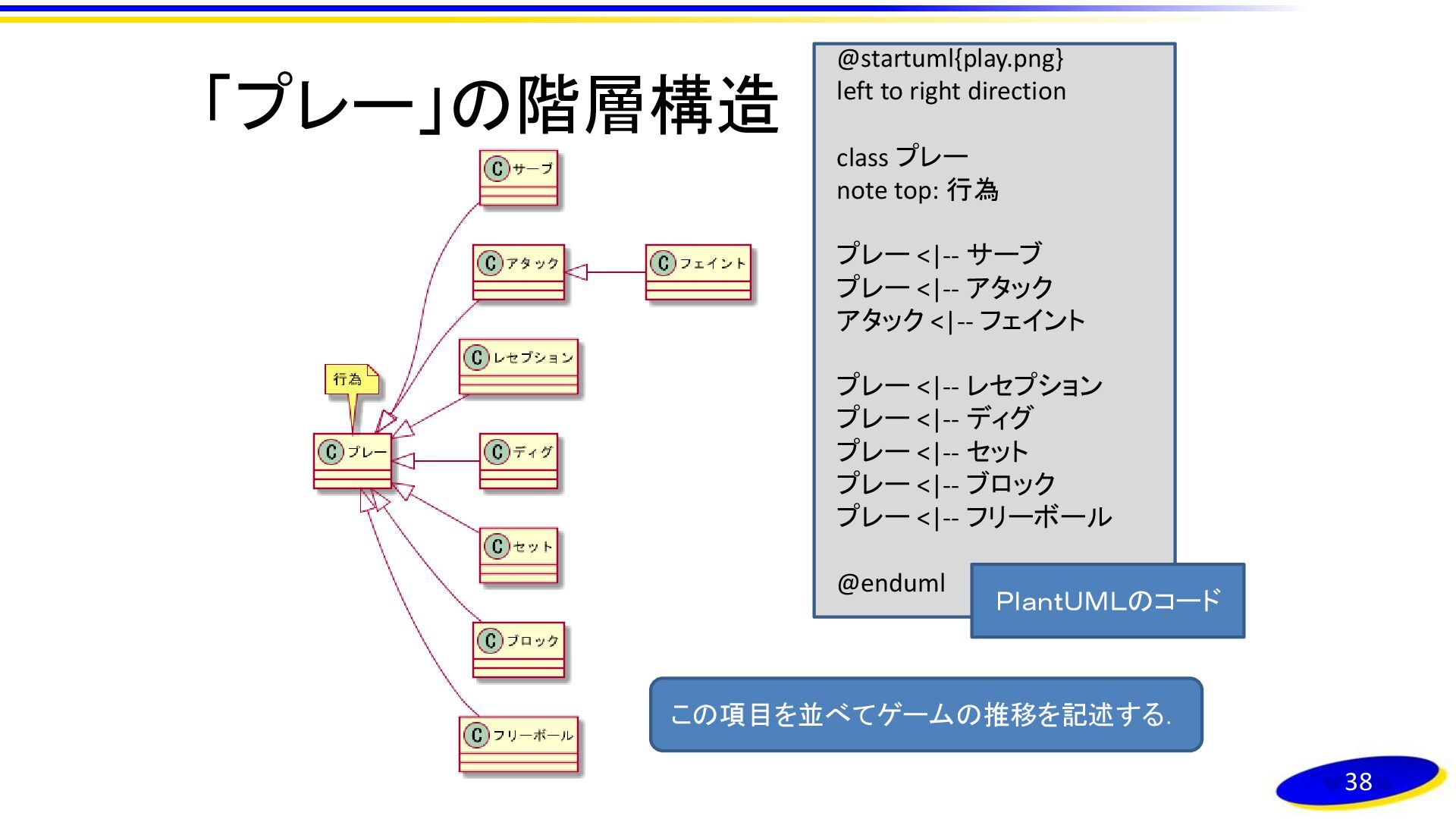
「プレー」の階層構造 38 @startuml{play.png} left to right direction class プレー note
top: 行為 プレー <|-- サーブ プレー <|-- アタック アタック <|-- フェイント プレー <|-- レセプション プレー <|-- ディグ プレー <|-- セット プレー <|-- ブロック プレー <|-- フリーボール @enduml PlantUMLのコード この項目を並べてゲームの推移を記述する.
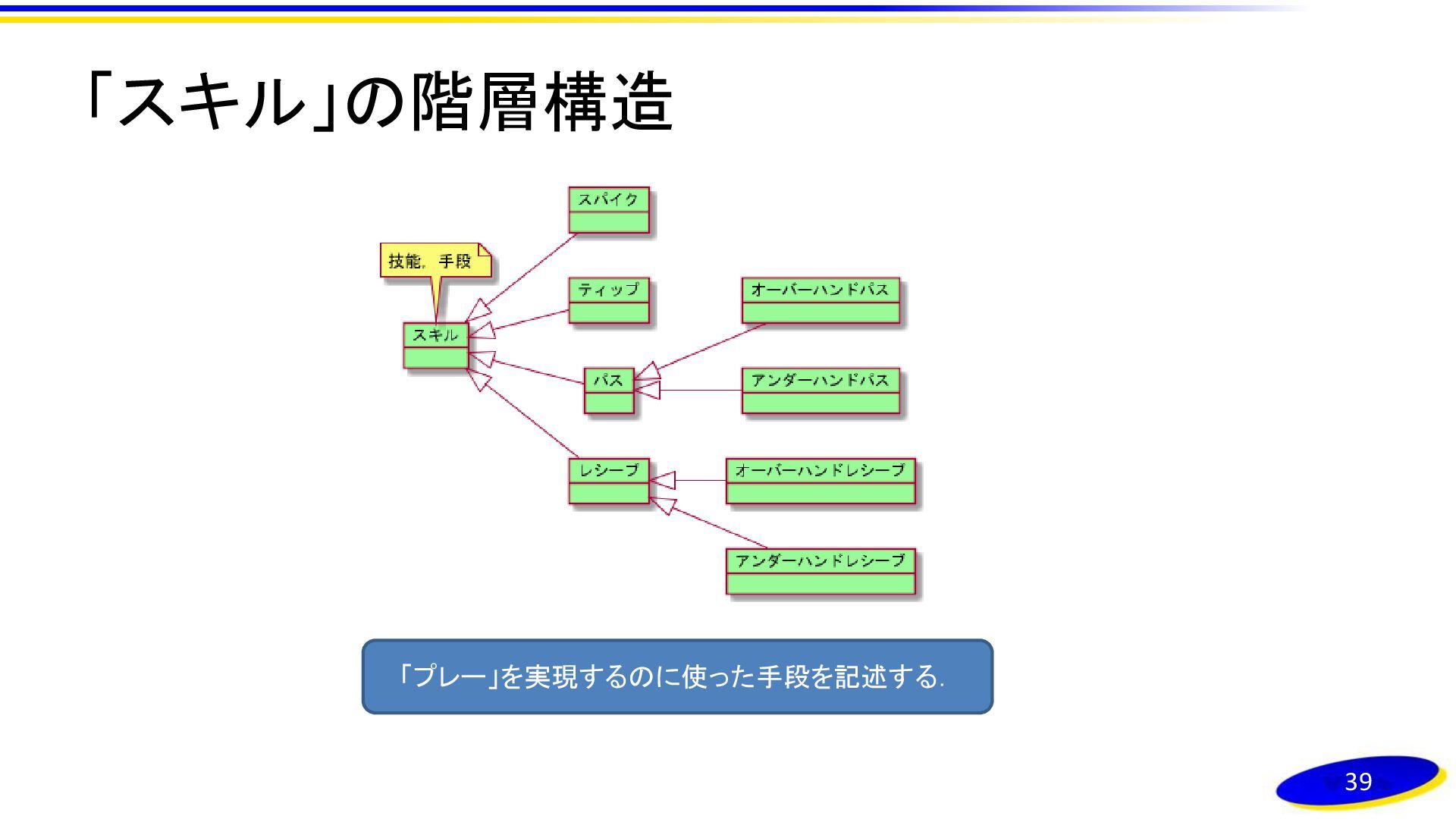
「スキル」の階層構造 39 「プレー」を実現するのに使った手段を記述する.
ゲーム記述の実例(サンプル動画) 40 World Championship 2015, POL vs. USA
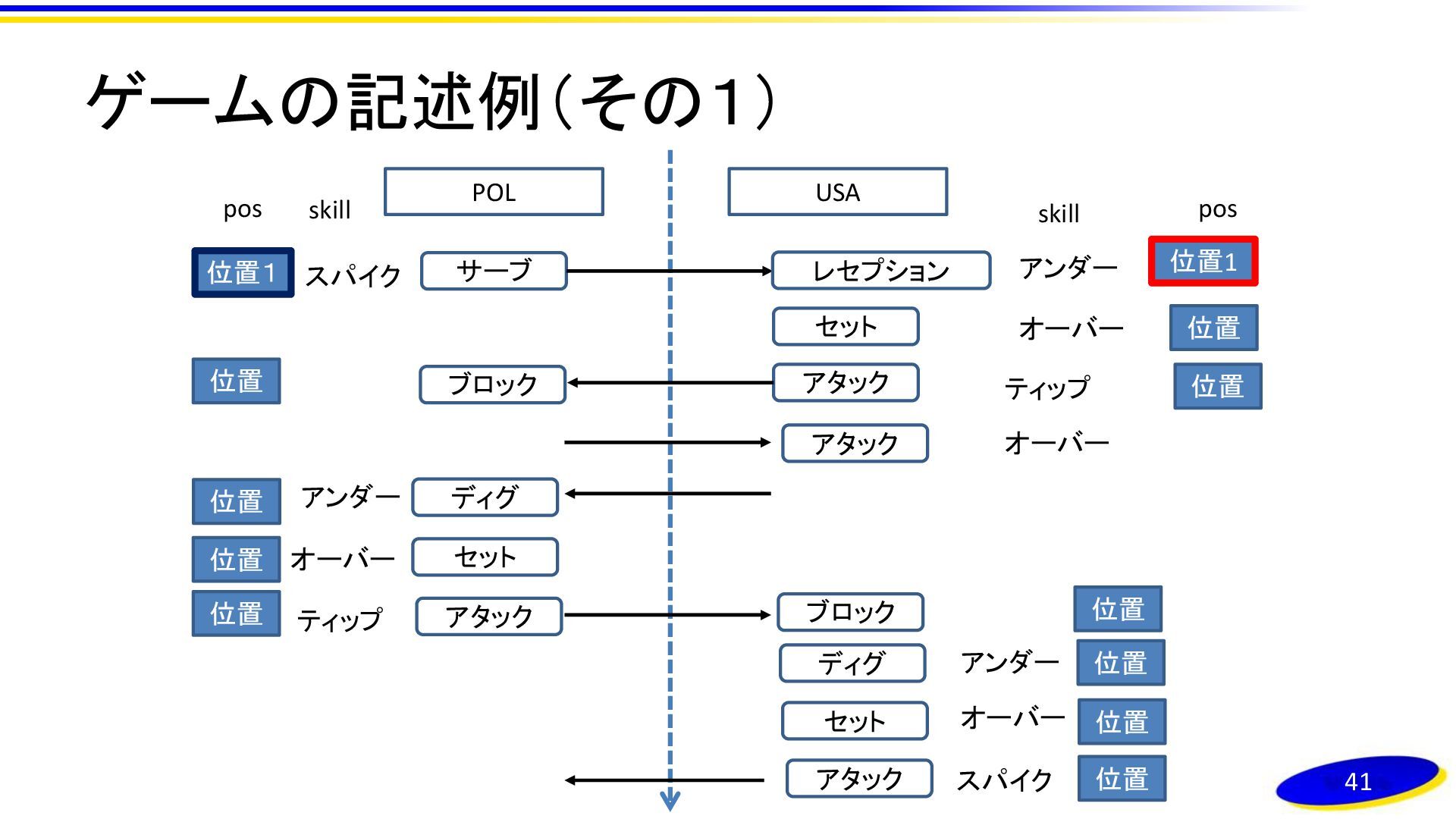
ゲームの記述例(その1) 41 POL USA サーブ レセプション セット アタック ブロック ディグ
ブロック ディグ セット アタック セット アタック 位置1 skill pos skill pos スパイク オーバー ティップ アンダー 位置 位置 位置 位置 位置 位置 位置 位置 位置 位置 オーバー スパイク アンダー オーバー アタック アンダー ティップ オーバー 位置1
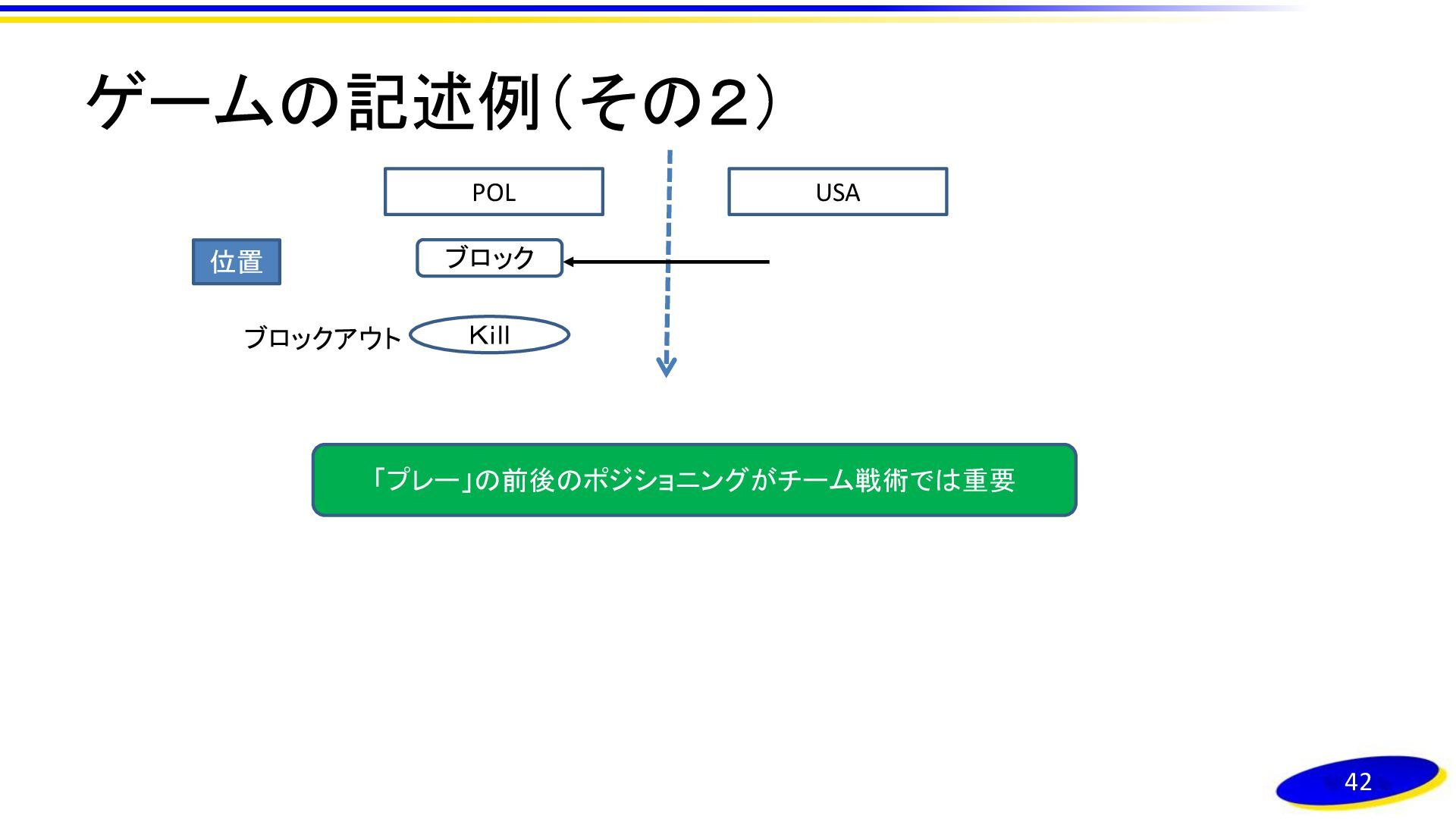
ゲームの記述例(その2) 42 POL USA ブロック Kill 位置 ブロックアウト 「プレー」の前後のポジショニングがチーム戦術では重要
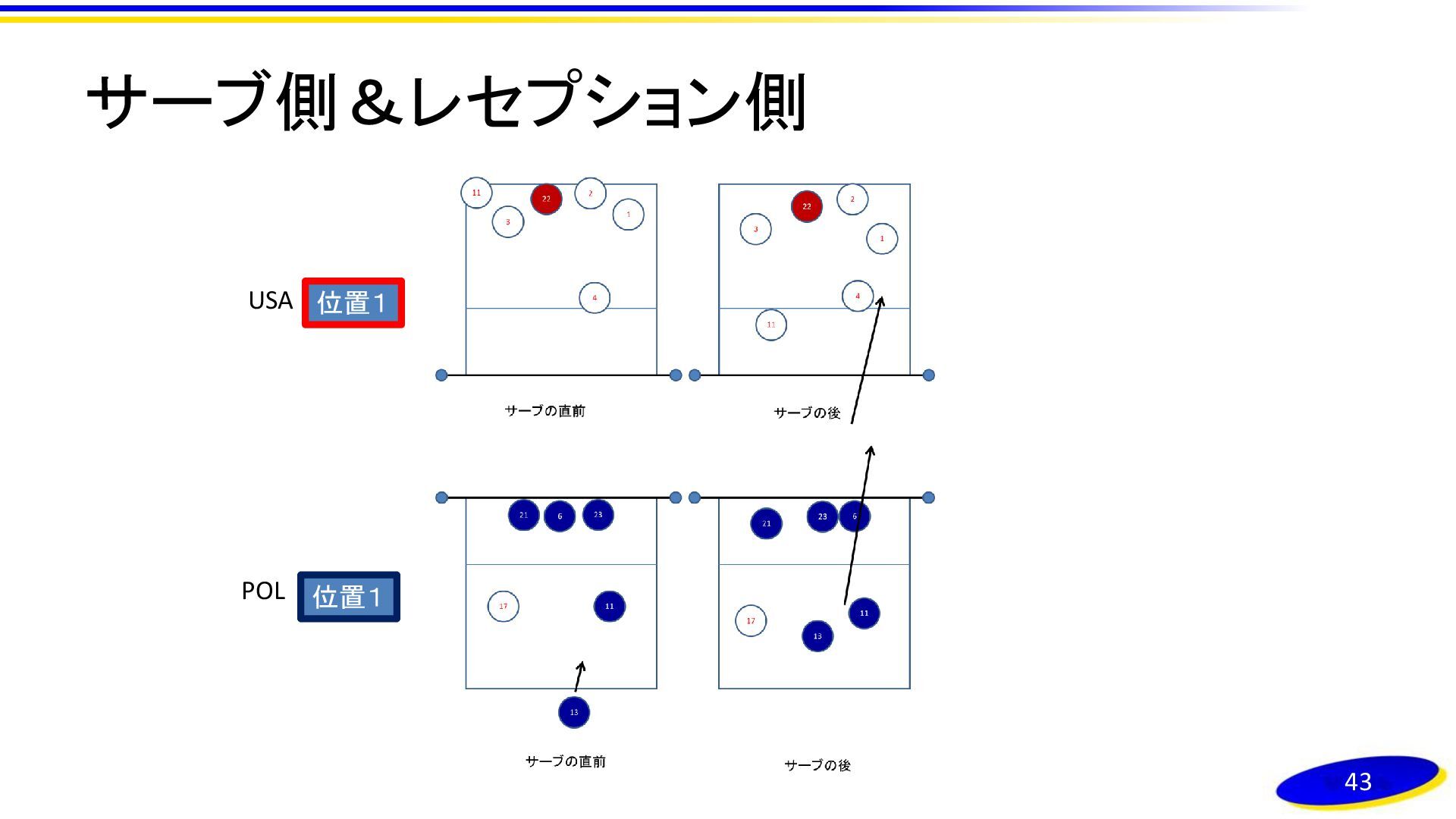
サーブ側&レセプション側 43 位置1 POL 位置1 USA
3.選手,チームの学習環境 44
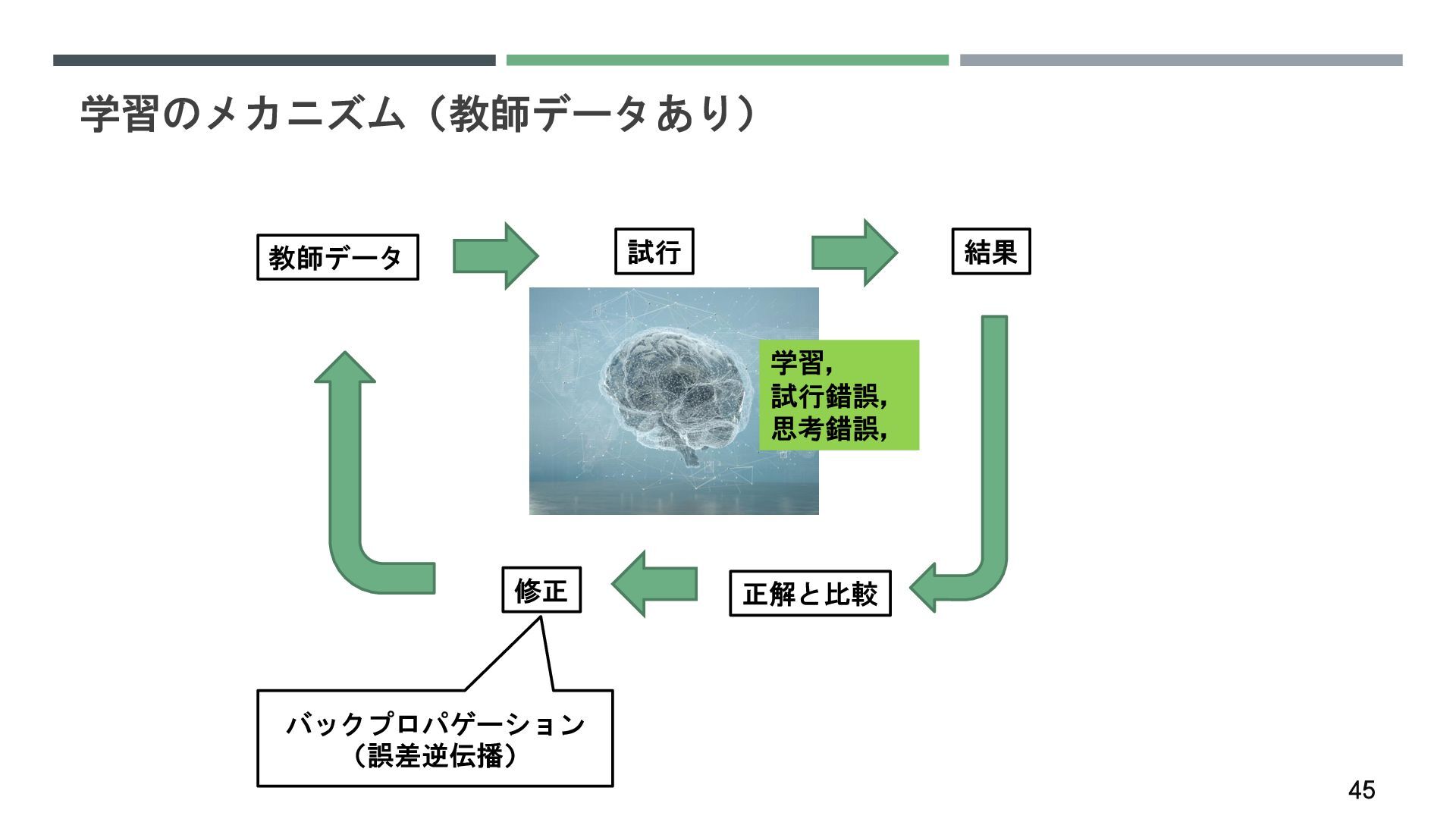
学習のメカニズム(教師データあり) 45 教師データ 結果 試行 正解と比較 修正 バックプロパゲーション (誤差逆伝播) 学習,
試行錯誤, 思考錯誤,
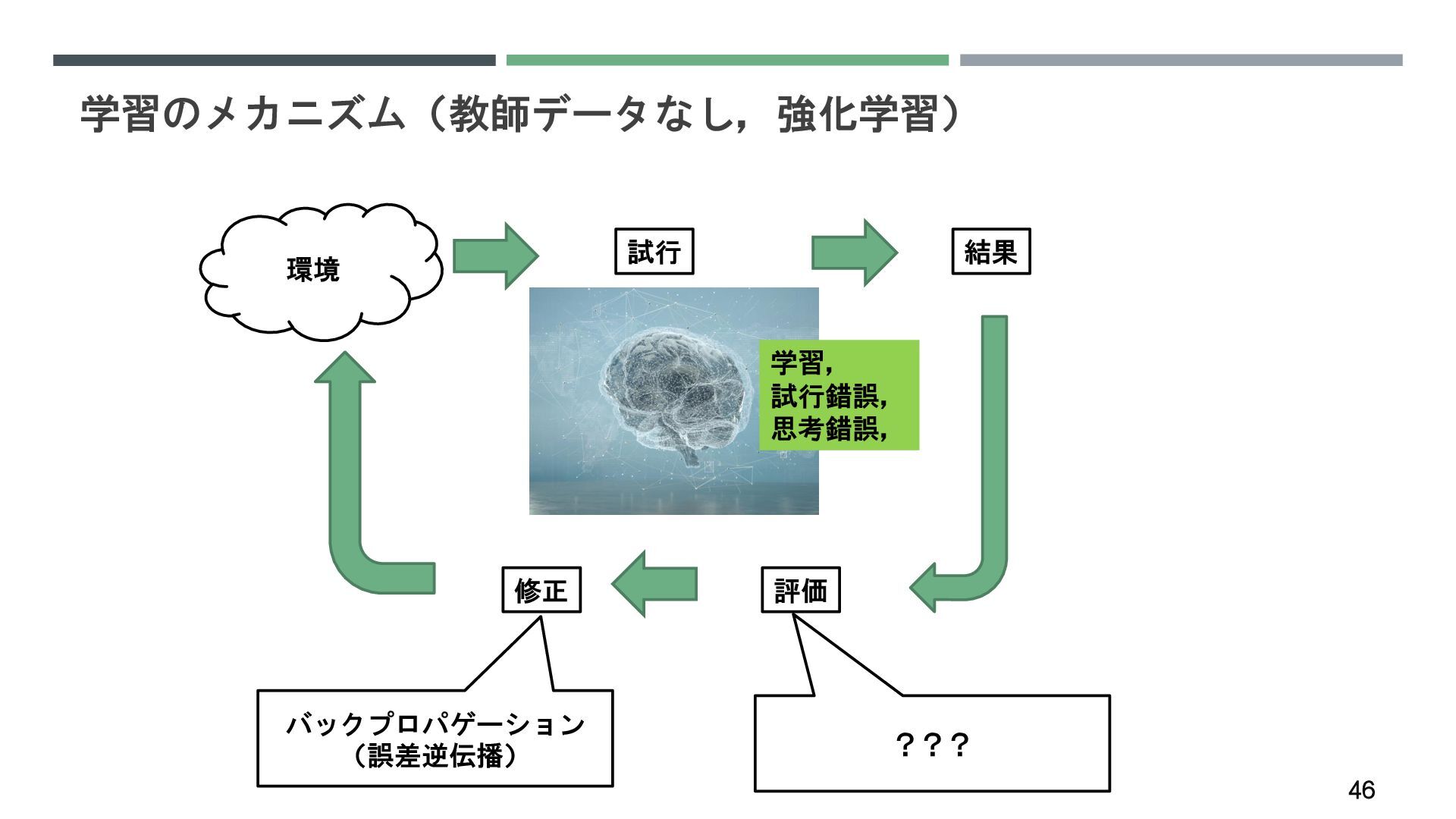
学習のメカニズム(教師データなし,強化学習) 46 結果 試行 評価 修正 バックプロパゲーション (誤差逆伝播) 学習, 試行錯誤,
思考錯誤, 環境 ???
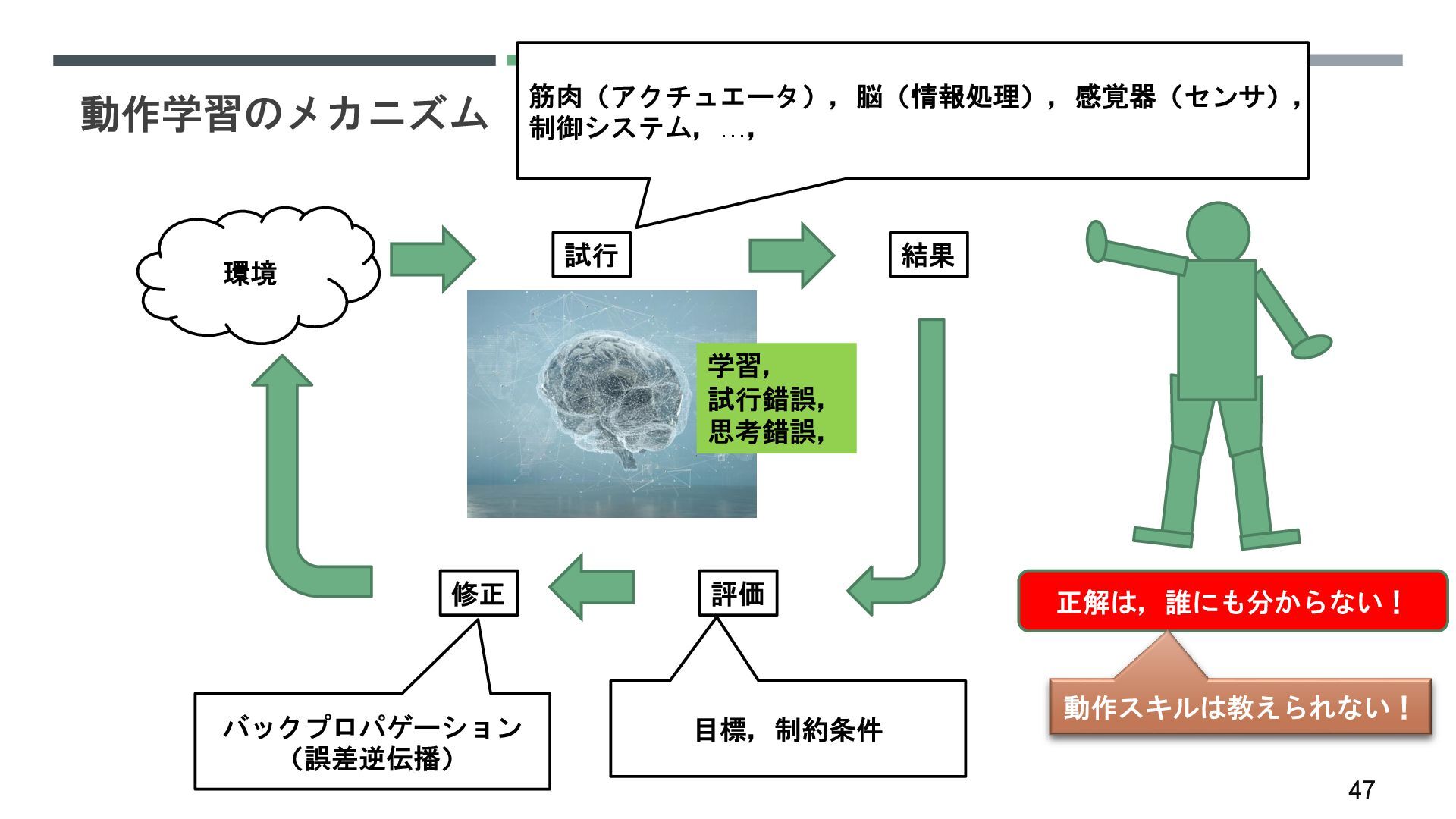
動作学習のメカニズム 47 結果 試行 評価 修正 バックプロパゲーション (誤差逆伝播) 学習, 試行錯誤,
思考錯誤, 環境 目標,制約条件 筋肉(アクチュエータ),脳(情報処理),感覚器(センサ), 制御システム,…, 正解は,誰にも分からない! 動作スキルは教えられない!
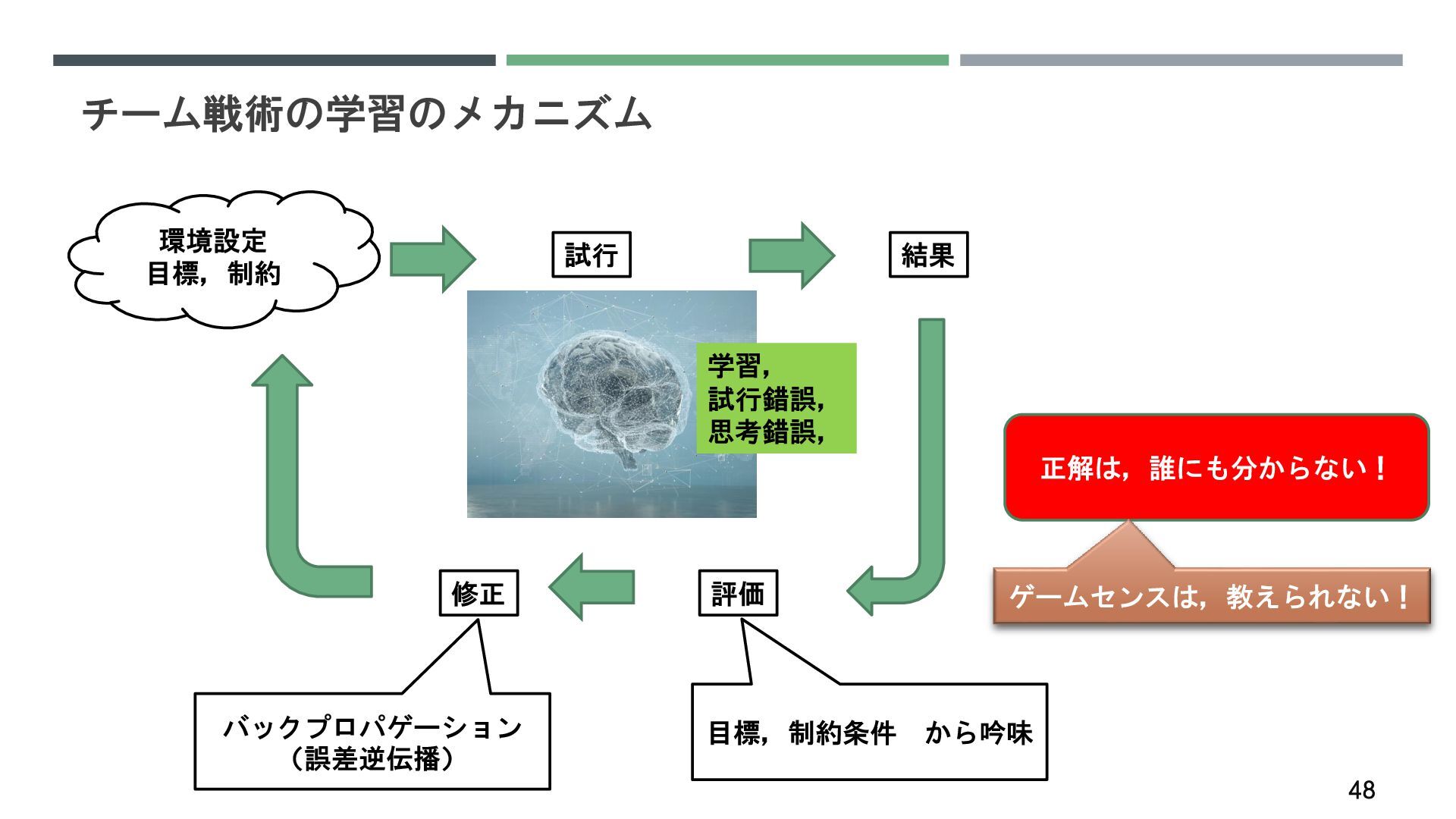
チーム戦術の学習のメカニズム 48 結果 試行 評価 修正 バックプロパゲーション (誤差逆伝播) 学習, 試行錯誤,
思考錯誤, 環境設定 目標,制約 目標,制約条件 から吟味 正解は,誰にも分からない! ゲームセンスは,教えられない!
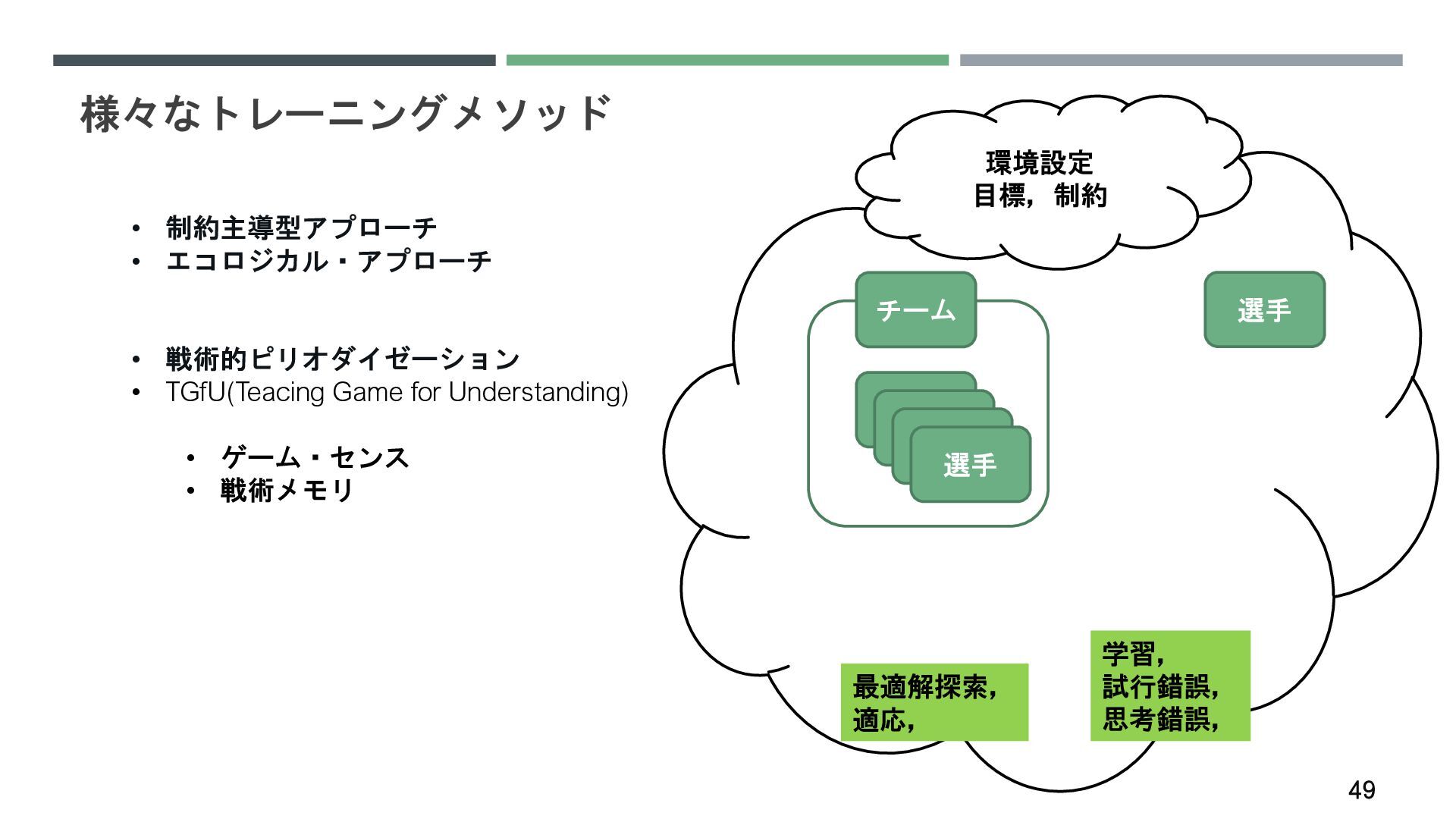
様々なトレーニングメソッド 49 • 制約主導型アプローチ • エコロジカル・アプローチ • 戦術的ピリオダイゼーション • TGfU(Teacing
Game for Understanding) • ゲーム・センス • 戦術メモリ 環境設定 目標,制約 選手 チーム 選手 選手 選手 選手 学習, 試行錯誤, 思考錯誤, 最適解探索, 適応,
学習(教室で行われていること) 50 文字,言葉,画像,動画, .... 言語化,可視化情報 教師データ 学習, 思考錯誤, 思考錯誤, 教員
学生 「教える」という作業は,虚妄! • 教員から学生へ,情報を「伝える」 • 「伝わる(学習する)」かどうかは,学生次第 • 他者を無理やり変えることはできない • 伝わる確率を上げる. • 「学習者がワクワクした状態」が学習効果が最大 (夢中) • 周りには「環境設定」しかやれることは無い
まとめ 51 スポーツだろうと,学問だろうと,技術者だろうと,... 学習効果が最大になるような環境設定が重要! 次世代の人間が育たなければ滅ぶ…. ただそれだけの話です.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}