with graph-theoretic OpenStreetMap street networks, 2017 • GitHub - gboeing/osmnx-examples: Gallery of OSMnx tutorials, usage examples, and feature demonstrations. https://github.com/gboeing/osmnx-examples • Vincent D. Blondel et.al, Fast unfolding of communities in large networks, 2008 35
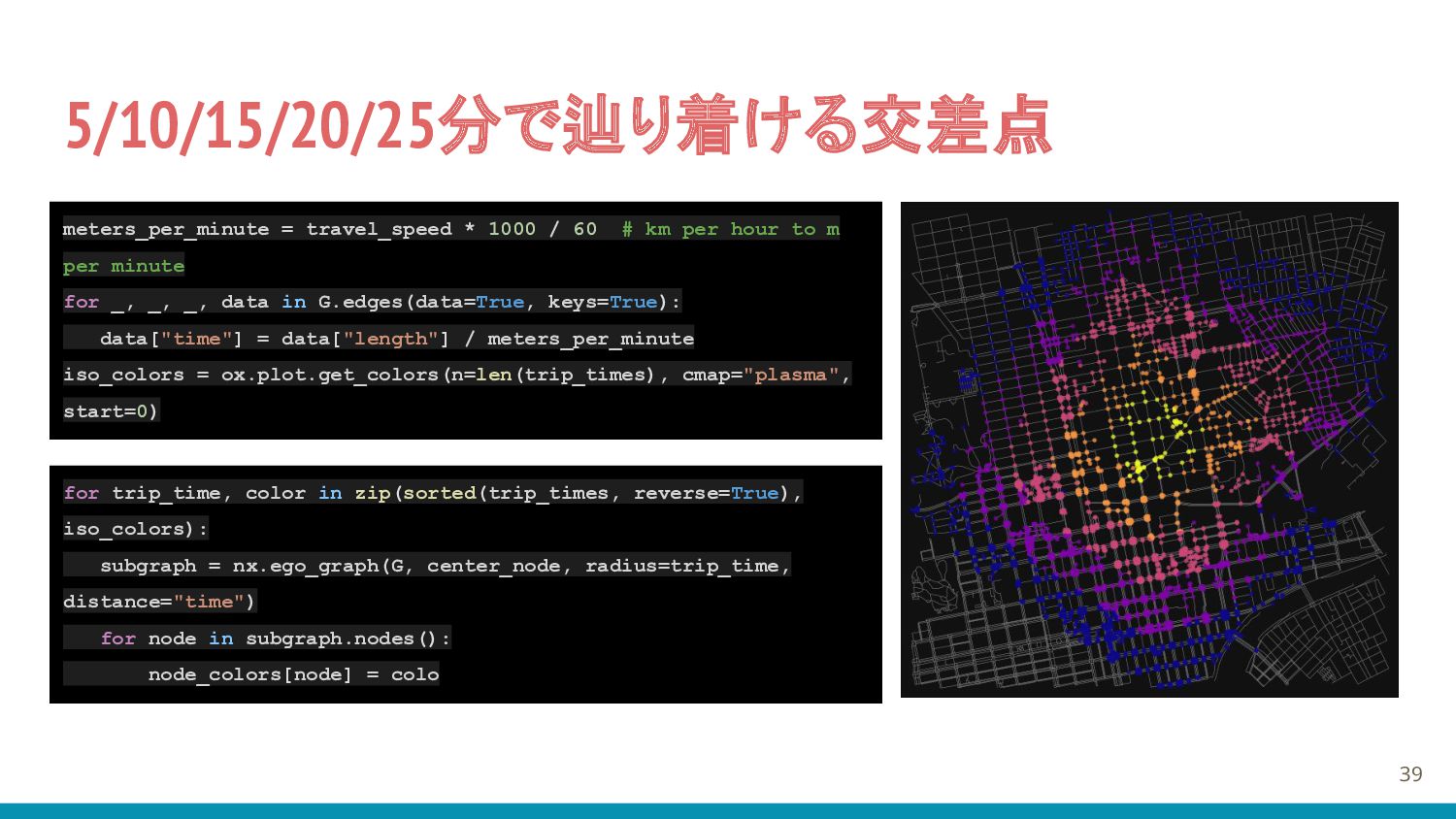
# km per hour to m per minute for _, _, _, data in G.edges(data=True, keys=True): data["time"] = data["length"] / meters_per_minute iso_colors = ox.plot.get_colors(n=len(trip_times), cmap="plasma", start=0) for trip_time, color in zip(sorted(trip_times, reverse=True), iso_colors): subgraph = nx.ego_graph(G, center_node, radius=trip_time, distance="time") for node in subgraph.nodes(): node_colors[node] = colo
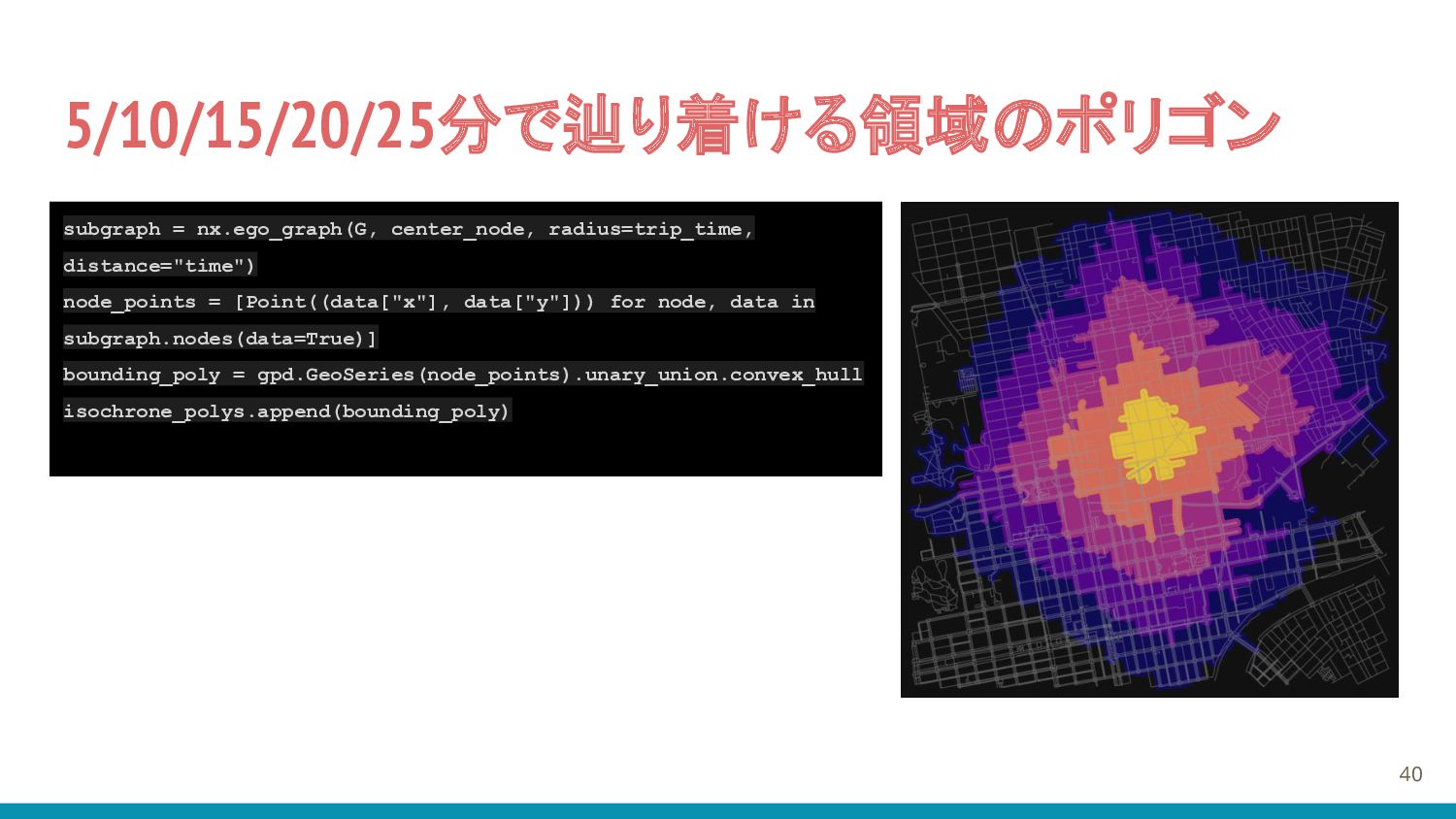
[Point((data["x"], data["y"])) for node, data in subgraph.nodes(data=True)] bounding_poly = gpd.GeoSeries(node_points).unary_union.convex_hull isochrone_polys.append(bounding_poly)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}