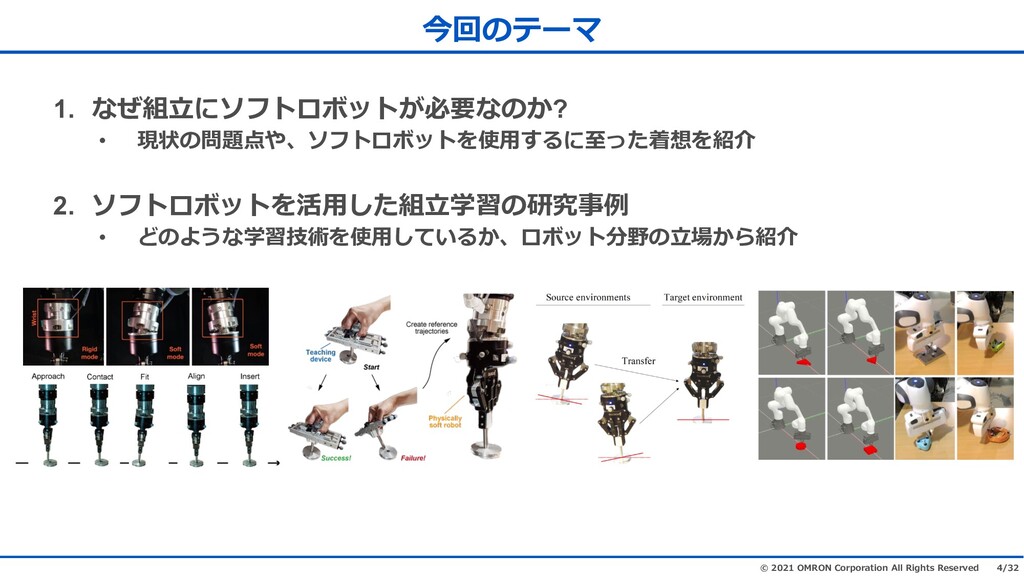
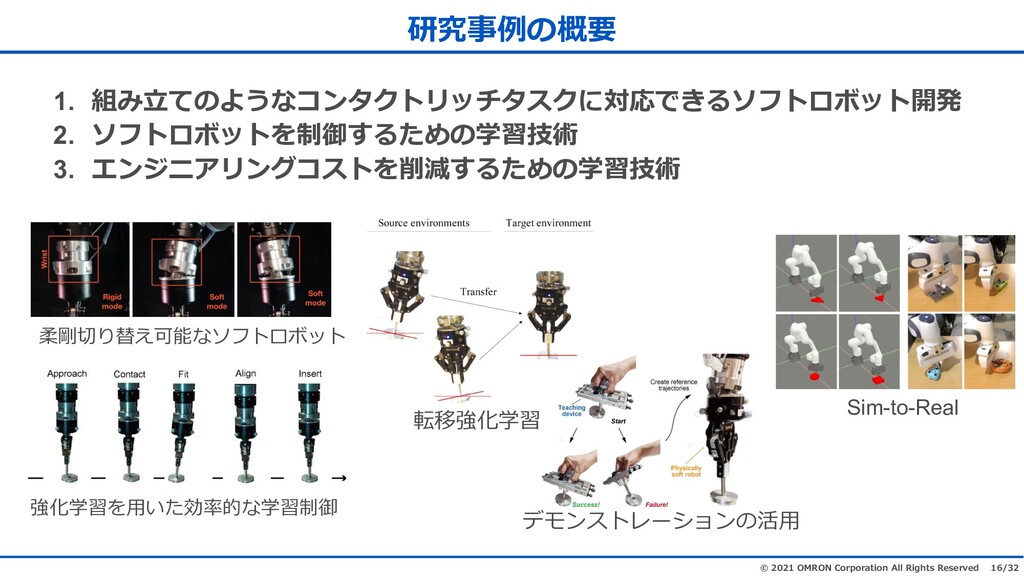
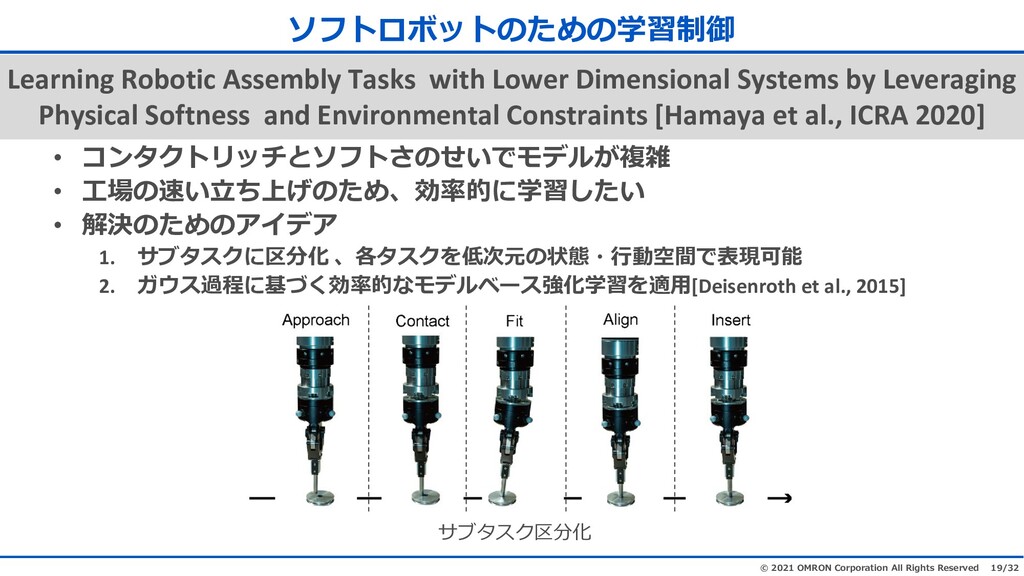
• ੵৃभசःয়ठऑभञीؚ૨प৾ಆखञः • ੰৠभञीभ॔ॖॹ॔ 1. १ঈॱ५ॡपયী৲ ؚॱ५ॡ॑ઃ੪भ૾ଙ؞ষ૬दਠ૭ચ 2. फ़क़५ૌஙप੦तऎ૨ऩঔॹঝঋش५ਘ৲৾ಆ॑ి৷[Deisenroth et al., 2015] Learning Robotic Assembly Tasks with Lower Dimensional Systems by Leveraging Physical Softness and Environmental Constraints [Hamaya et al., ICRA 2020] ९ইॺটॵॺभञीभ৾ಆ౪ १ঈॱ५ॡયী৲
९ইॺটॵॺभञीभ৾ಆ౪ Learning Robotic Assembly Tasks with Lower Dimensional Systems by Leveraging Physical Softness and Environmental Constraints [Hamaya et al., ICRA 2020] १ঈॱ५ॡ “fit”भ৾ಆ ৾ಆ
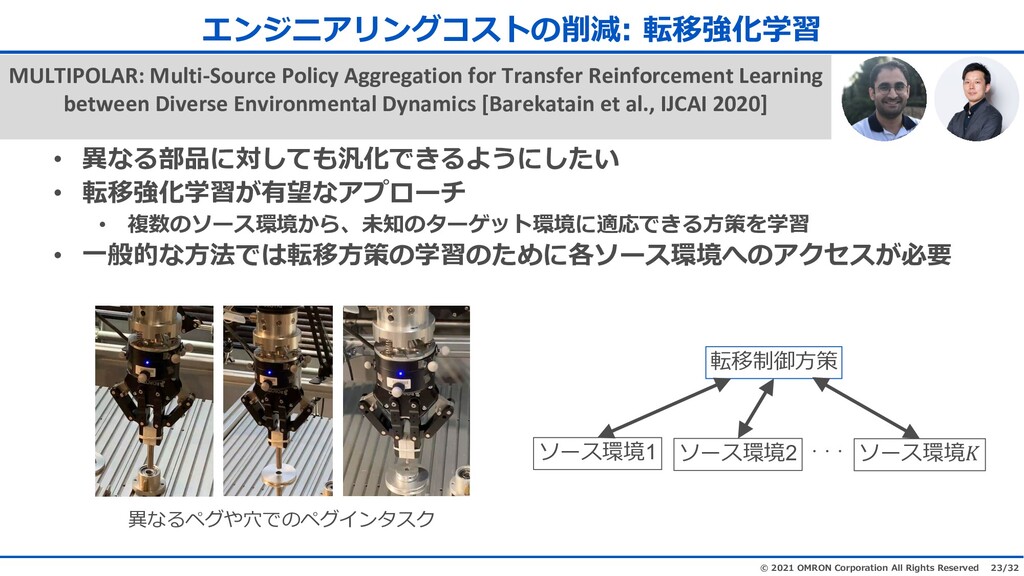
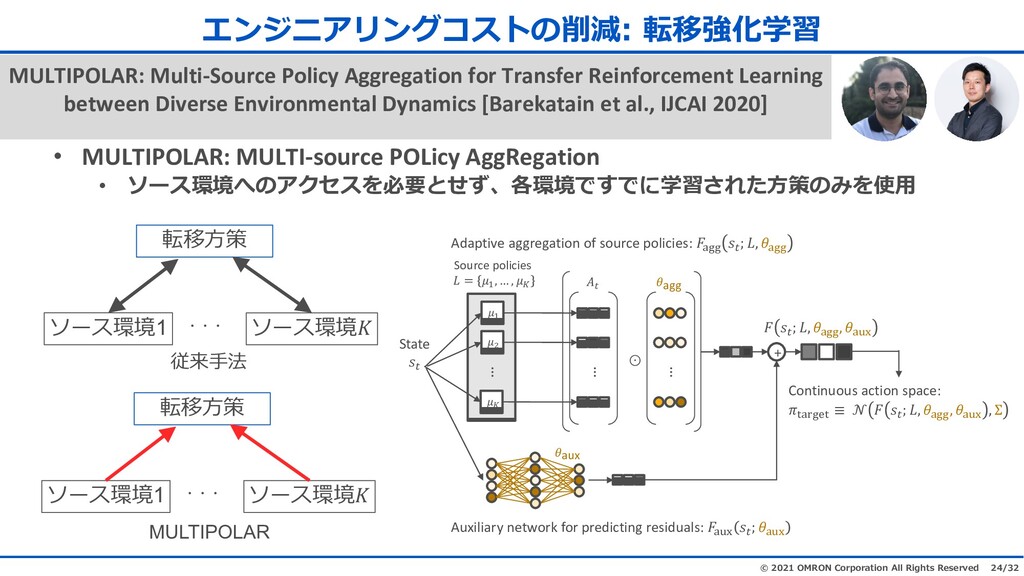
ग़থ४ॽ॔জথॢ॥५ॺभచ: ૡਘ৲৾ಆ MULTIPOLAR Learning from scratch Ant Hopper MULTIPOLAR: Multi-Source Policy Aggregation for Transfer Reinforcement Learning between Diverse Environmental Dynamics [Barekatain et al., IJCAI 2020]
• ॲॖॼॡ५ঔॹঝૐ৺खؚঔॹঝঋش५ਘ৲৾ಆ॑ి৷ TRANS-AM: Transfer Learning by Aggregating Dynamics Models for Soft Robotic Assembly [Tanaka et al., under review] ग़থ४ॽ॔জথॢ॥५ॺभచ: ૡਘ৲৾ಆ ॲॖॼॡ५ঔॹঝૐ৺ ౮ऩॊഓ২भา॑ण୭षभૡ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}