2021.12.3 Fri 開催の【SenseTime Japan × Sansan】画像処理勉強会資料です。
https://sansan.connpass.com/event/230636/
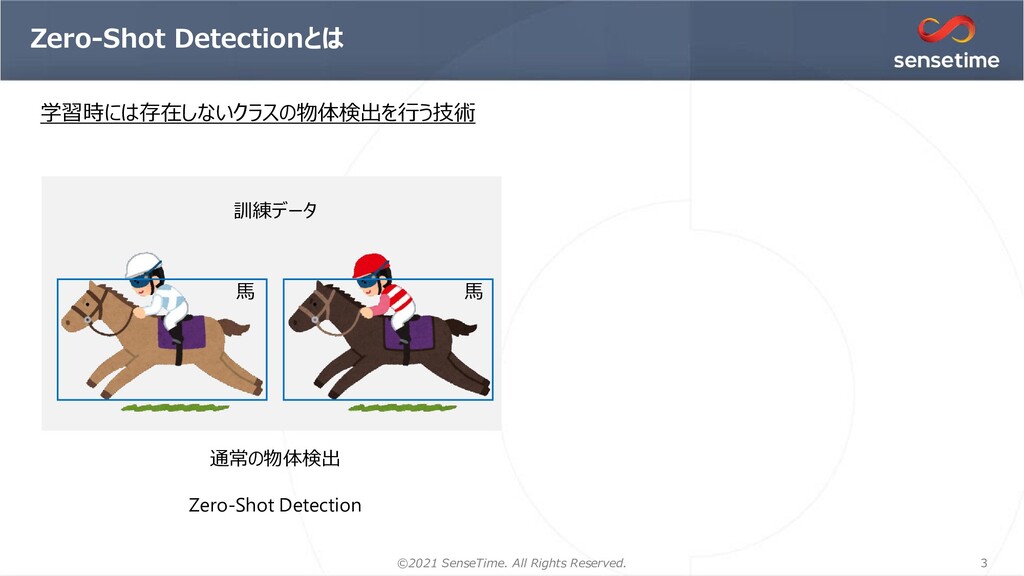
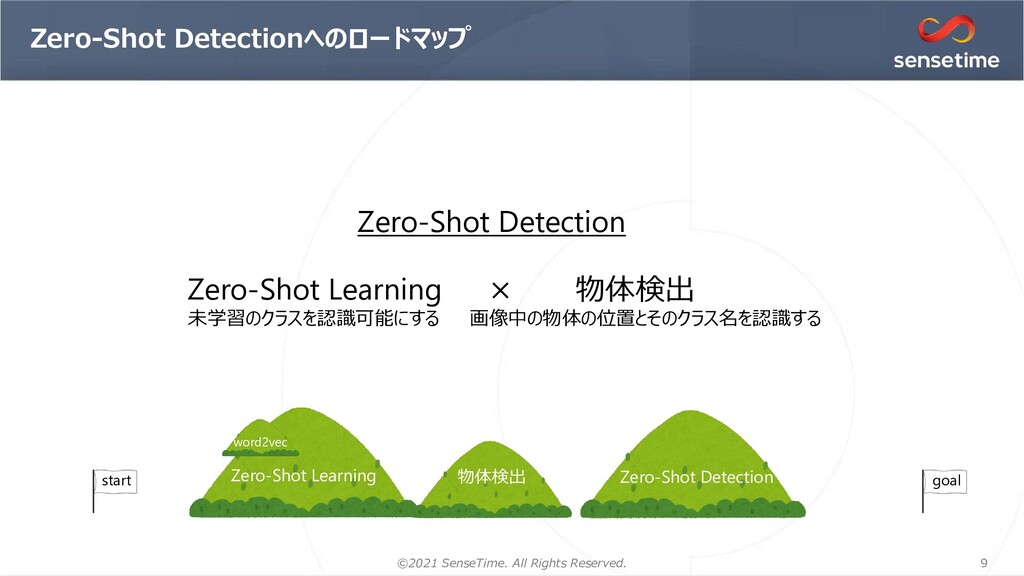
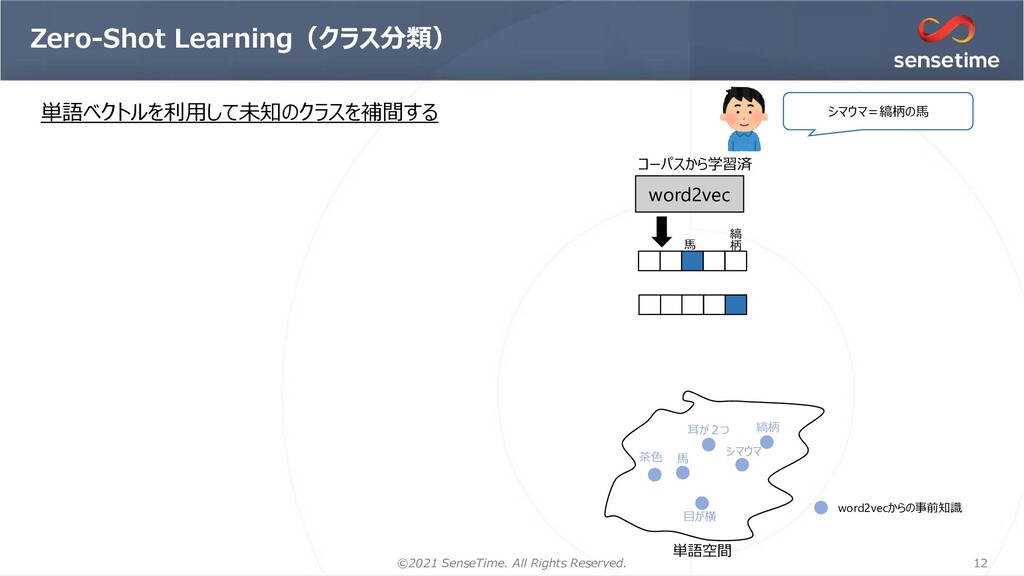
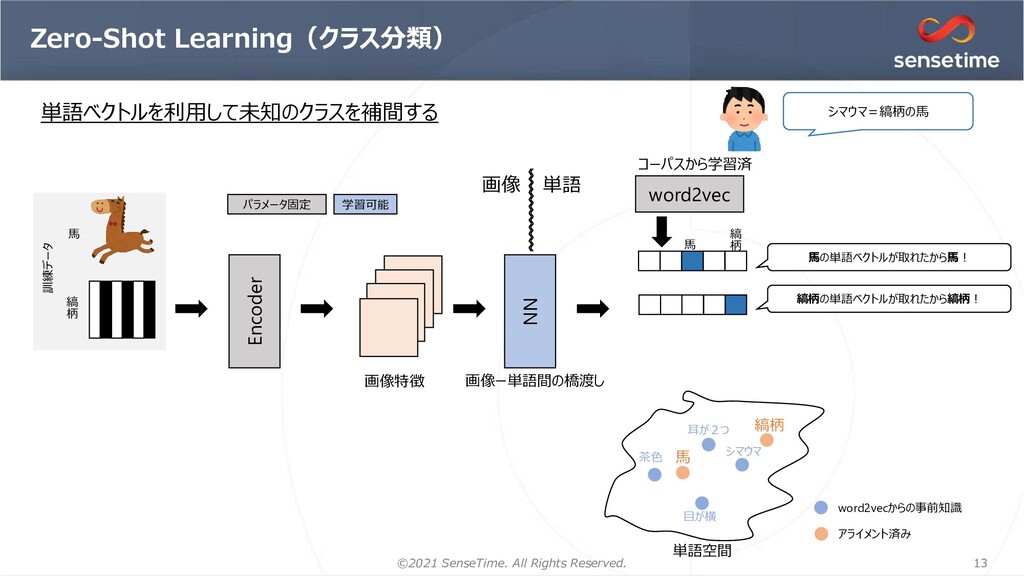
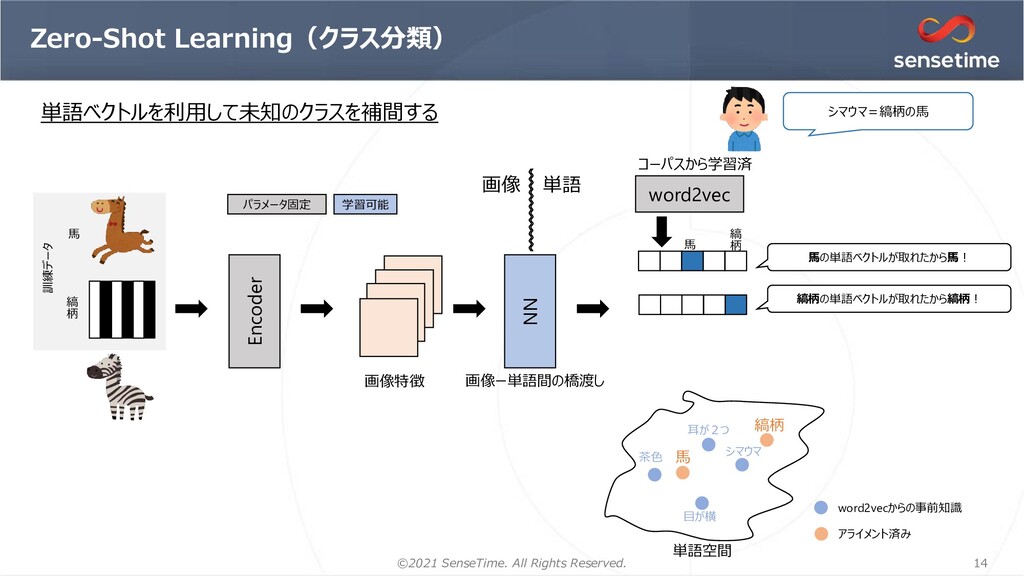
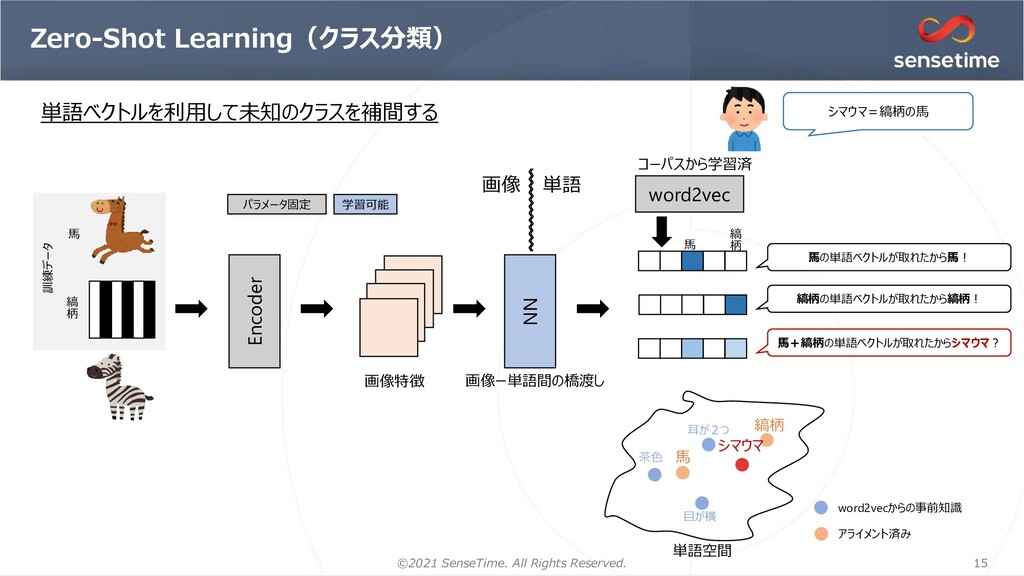
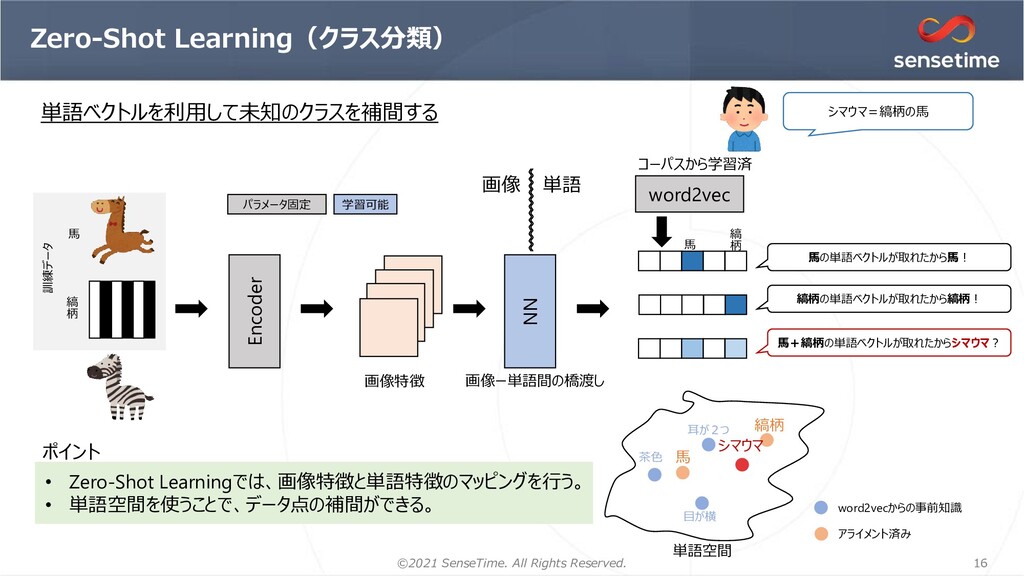
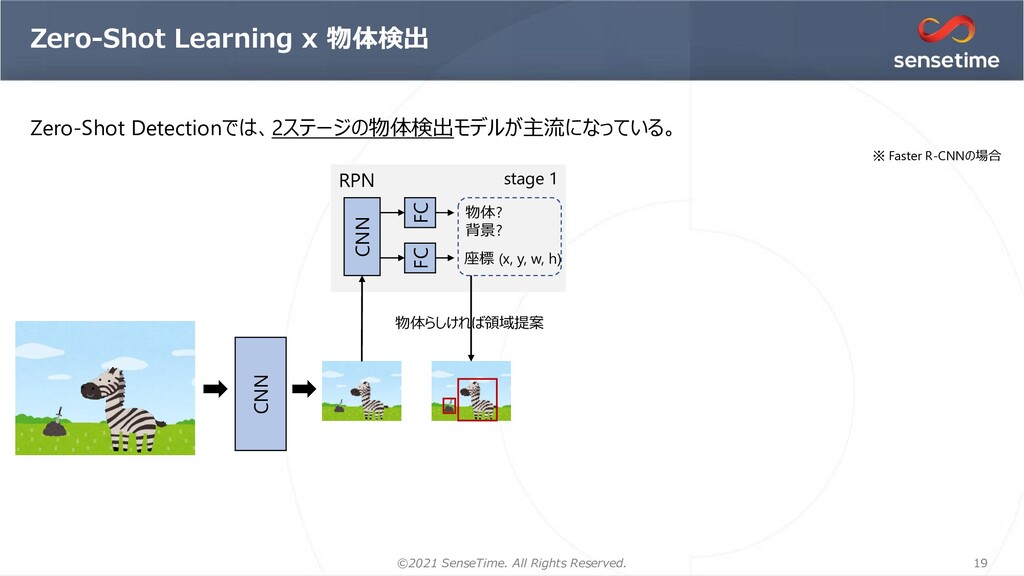
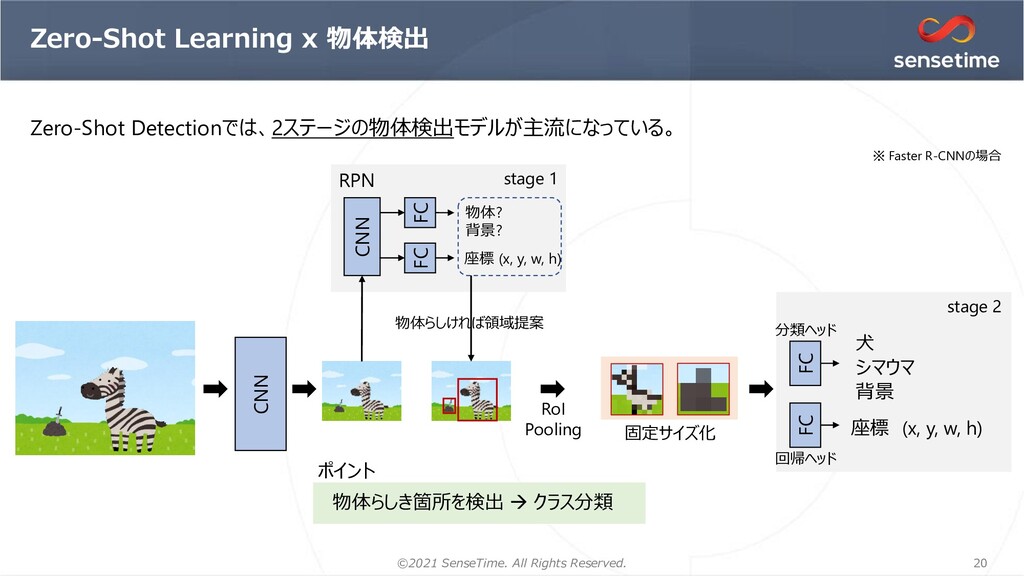
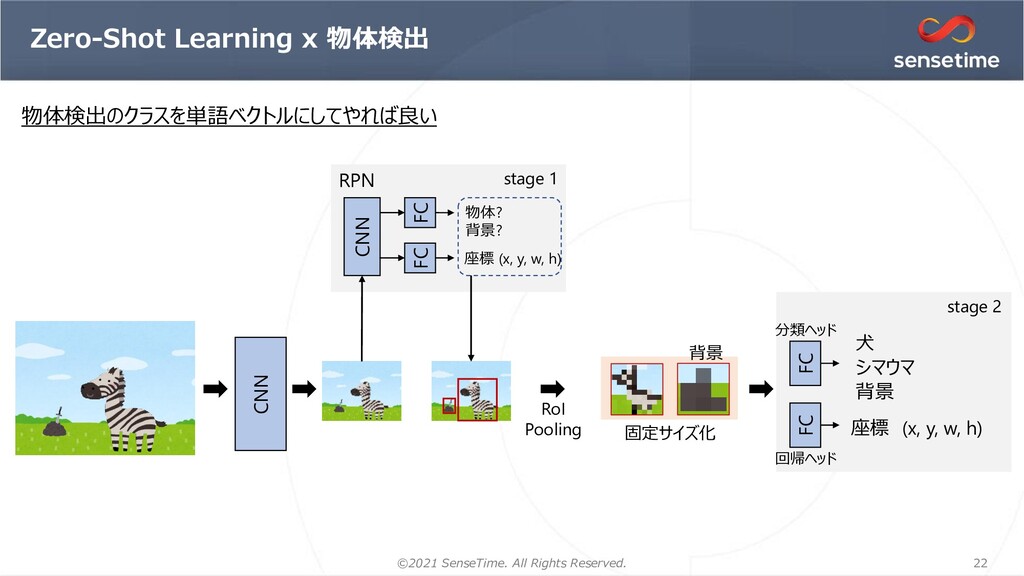
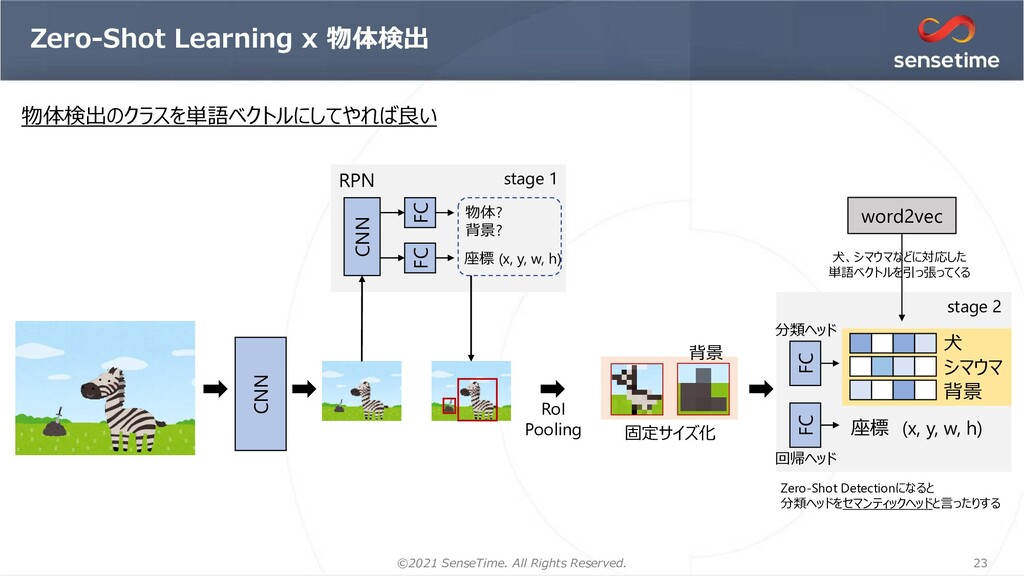
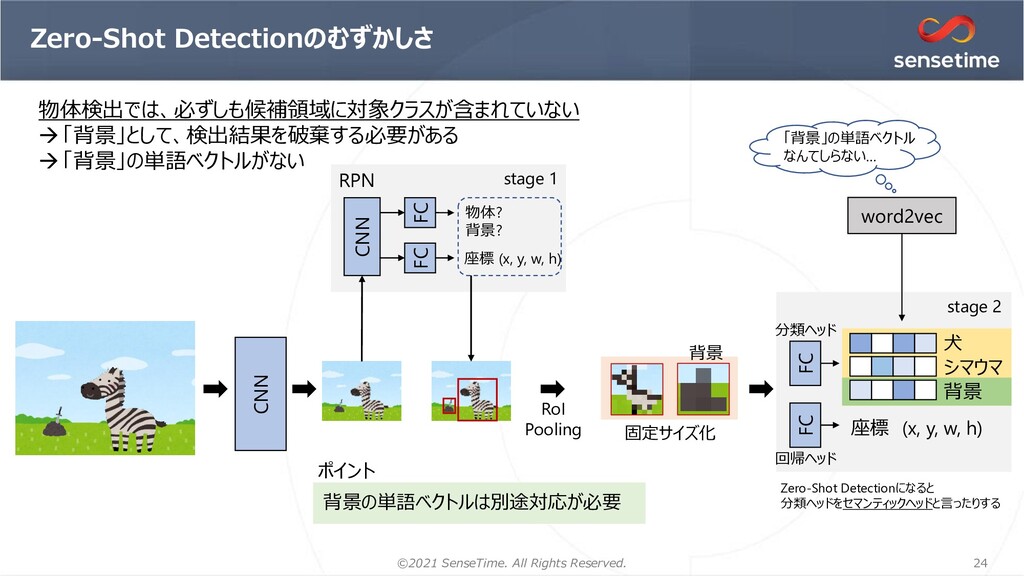
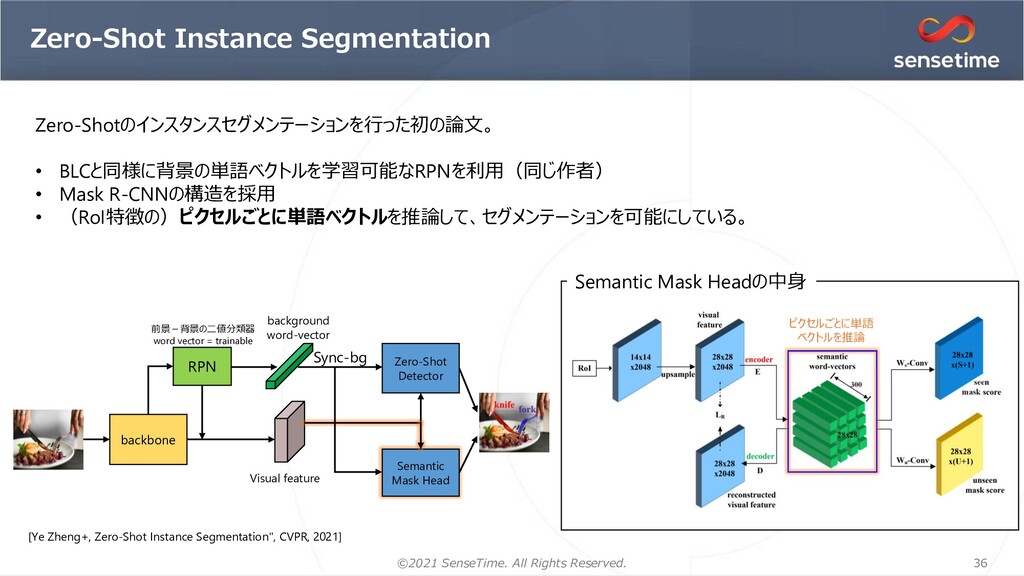
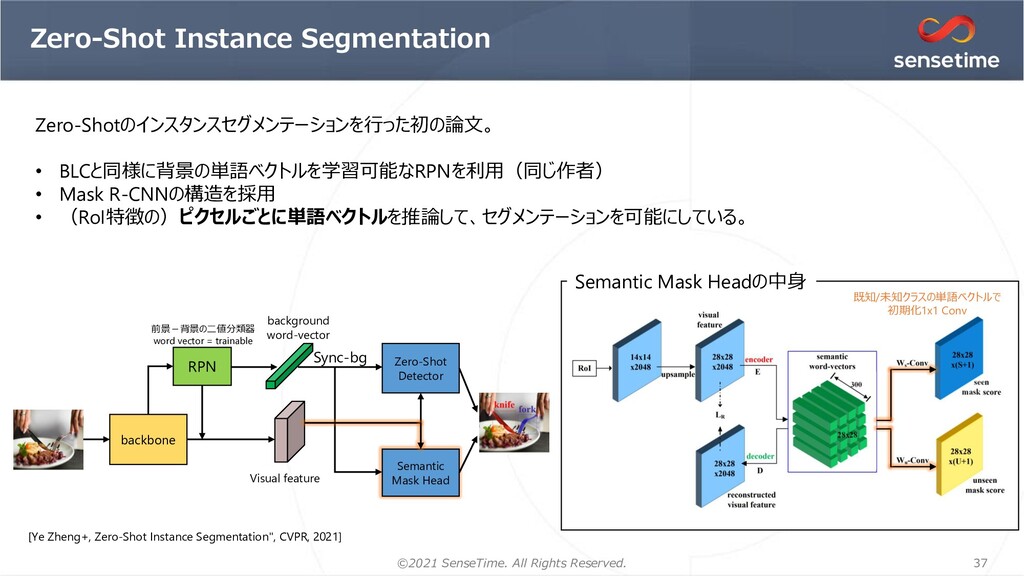
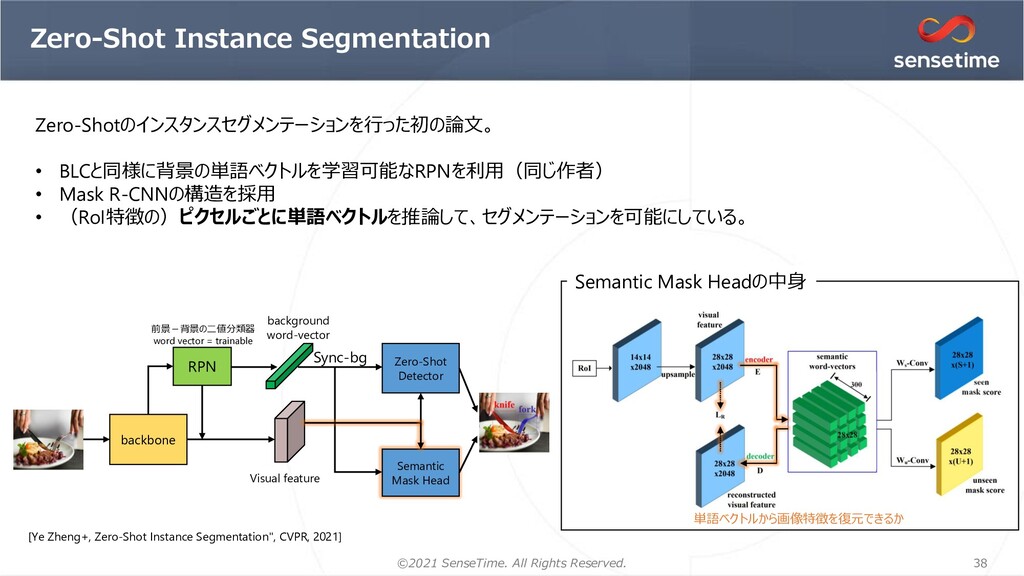
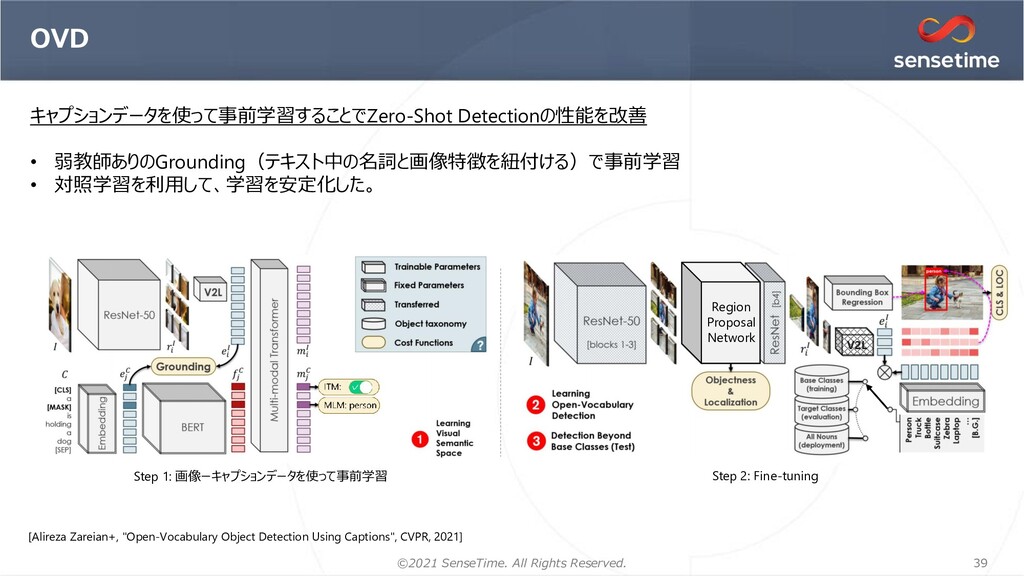
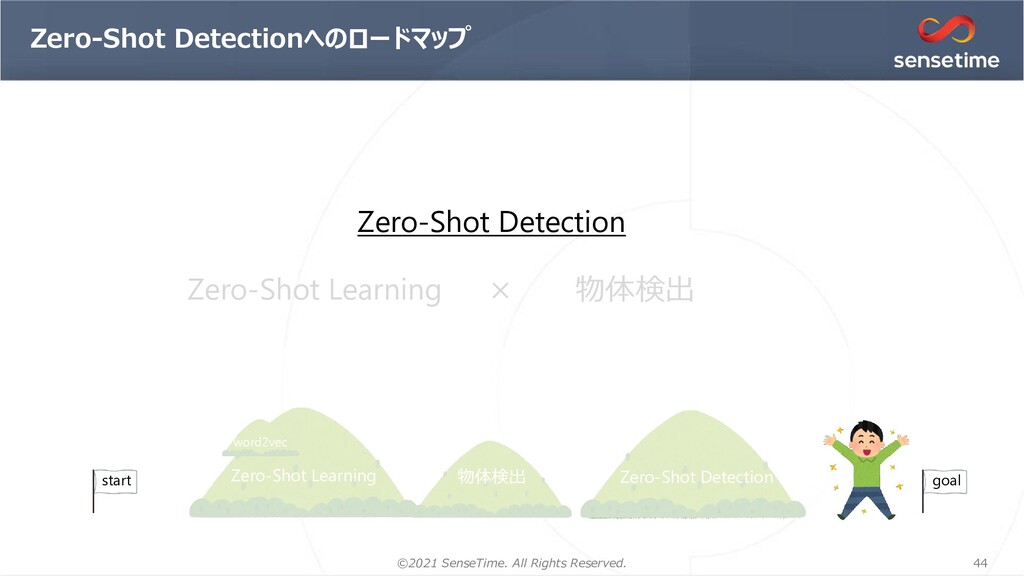
title:ゼロショット物体検出の研究動向
speaker: 飯田啄巳(Takumi IIDA)
株式会社センスタイムジャパン(SenseTime Japan Ltd.)
株式会社センスタイムジャパンの公式アカウントです。
外部向け発表資料を公開しております。
TECH blog: https://tech.sensetime.jp/
会社web: https://www.sensetime.jp/
TW: https://twitter.com/SensetimeJ
FB: https://www.facebook.com/sensetimejapan
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}