Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Research modeで取得した深度(Depth)データを可視化する / Depth da...
Search
Sponsored
·
SiteGround - Reliable hosting with speed, security, and support you can count on.
→
sotanmochi
April 17, 2018
Technology
210
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Research modeで取得した深度(Depth)データを可視化する / Depth data visualization for Hololens RS4 Research mode
sotanmochi
April 17, 2018
More Decks by sotanmochi
See All by sotanmochi
URP/HDRPを使ったVRM対応アプリの開発方法 / VRM Importer Extension
sotanmochi
0
1.8k
画像処理から始めるコンピュートシェーダ / Introduction to Image Processing using Compute Shader
sotanmochi
2
2.7k
Diminished Reality 入門 / Introduction to Diminished Reality
sotanmochi
2
9.5k
Unityでテクスチャにお絵描きするための線分描画アルゴリズムの話 / Line drawing algorithm using fragment shader
sotanmochi
2
4k
MagicOnionでマルチプレイゲームを作ってみる / Introduction to developing multiplayer games using MagicOnion
sotanmochi
1
2.6k
SmartRig Bipedを使ってみよう / Introduction to SmartRig Biped
sotanmochi
0
3.5k
VRMを使ったAR/MR撮影ツールを試作開発してみた話 / Prototype of Mobile Mixed Capture
sotanmochi
0
1.8k
リアルとバーチャルの融合によって越えられない壁を壊す / TechCafe vol.8 LT
sotanmochi
0
300
ユニティちゃんと鬼ごっこができるMRゲームと戦術位置解析システム / Mixed reality game and tactical position analysis
sotanmochi
0
730
Other Decks in Technology
See All in Technology
企業でAWS Organizationsを動かすための組織設計の考え方
nrinetcom
PRO
1
110
マルチアカウント環境でSecurity Hubの運用、その後どうなった? / SRE NEXT 2026 miniLT会
genda
0
110
AIコード生成×サプライチェーン攻撃 — PHPが直面する“二重の信頼問題
shinyasaita
0
230
ゴールデンパスは敷いただけでは道にならない ─ 企画部門のエンジニアが技術標準を事業価値に変えるまで
mhrtech
1
230
世界、断片、モデル。そして理解
ardbeg1958
1
130
ファミコンでPHPを動かす / PHP on the Famicom
tomzoh
2
470
CDKで書くECSのベストプラクティス、 改めて考え直す2026 #cdkconf2026
makies
3
850
実践!既存 Project への AI-Driven Development 適用〜 一ヶ月で Project 唯一のフロントエンドエンジニアを作り出せ〜
lycorptech_jp
PRO
0
240
LLM/Agent評価:トップ営業の発言を「正解」にする 〜暗黙的正解による評価を営業資産に変える〜
takkuhiro
1
230
Alphaモジュール使っていいのかい!?いけないのかい!?どっちなんだいっ!?
watany
1
290
しくみを学んで使いこなそう GitHub Copilot app
torumakabe
2
290
AI時代のYAGNI:「爆速で無駄になった機能」からの学び / 20260720 Naoki Takahashi
shift_evolve
PRO
3
350
Featured
See All Featured
The State of eCommerce SEO: How to Win in Today's Products SERPs - #SEOweek
aleyda
2
11k
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
590
Darren the Foodie - Storyboard
khoart
PRO
3
3.4k
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
460
Code Reviewing Like a Champion
maltzj
528
40k
GitHub's CSS Performance
jonrohan
1033
470k
RailsConf 2023
tenderlove
30
1.5k
Designing for Performance
lara
611
70k
Optimising Largest Contentful Paint
csswizardry
37
3.8k
XXLCSS - How to scale CSS and keep your sanity
sugarenia
249
1.3M
Measuring & Analyzing Core Web Vitals
bluesmoon
9
880
Applied NLP in the Age of Generative AI
inesmontani
PRO
4
2.4k
Transcript
Research modeで取得した 深度(Depth)データを可視化する 2018/04/17 Soichiro Sugimoto sotan(@sotanmochi)
自己紹介 氏名:杉本 宗一郎 所属:TIS株式会社・戦略技術センター 最近作っているもの(個人): ユニティちゃんと鬼ごっこするアプリ (コンテスト応募に向けて最終調整中) 2018/04/17 2
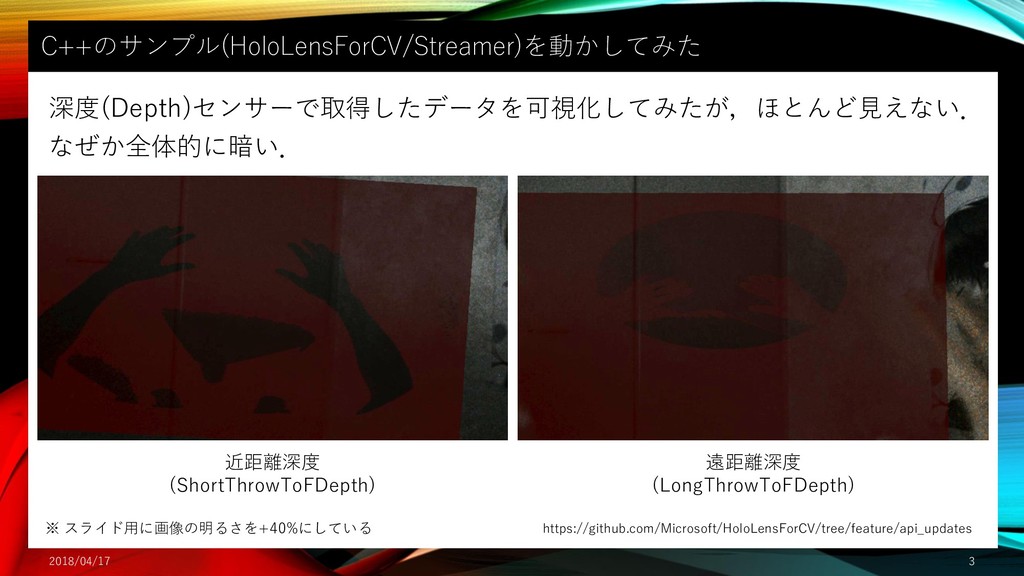
C++のサンプル(HoloLensForCV/Streamer)を動かしてみた 2018/04/17 3 深度(Depth)センサーで取得したデータを可視化してみたが,ほとんど見えない. なぜか全体的に暗い. ※ スライド用に画像の明るさを+40%にしている 近距離深度 (ShortThrowToFDepth) 遠距離深度
(LongThrowToFDepth) https://github.com/Microsoft/HoloLensForCV/tree/feature/api_updates
C++のサンプル(HoloLensForCV/Streamer)を動かしてみた 2018/04/17 4 テクスチャのフォーマットを変えてみたら,全体的に明るくなった. 深度に差分はあるはずだが,違いが分からない. 近距離深度 (ShortThrowToFDepth) 遠距離深度 (LongThrowToFDepth) https://github.com/Microsoft/HoloLensForCV/tree/feature/api_updates
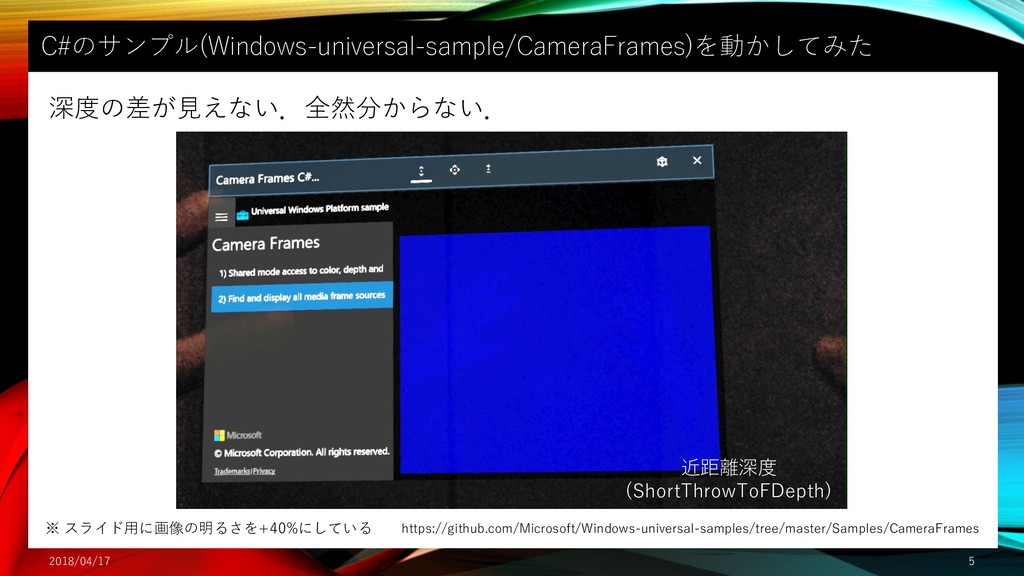
C#のサンプル(Windows-universal-sample/CameraFrames)を動かしてみた 2018/04/17 5 深度の差が見えない.全然分からない. ※ スライド用に画像の明るさを+40%にしている 近距離深度 (ShortThrowToFDepth) https://github.com/Microsoft/Windows-universal-samples/tree/master/Samples/CameraFrames
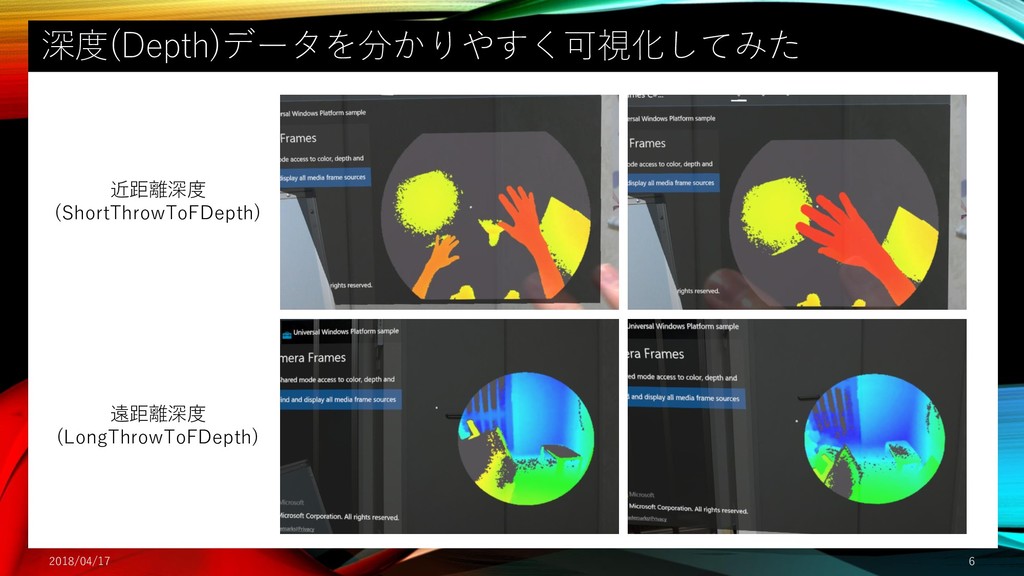
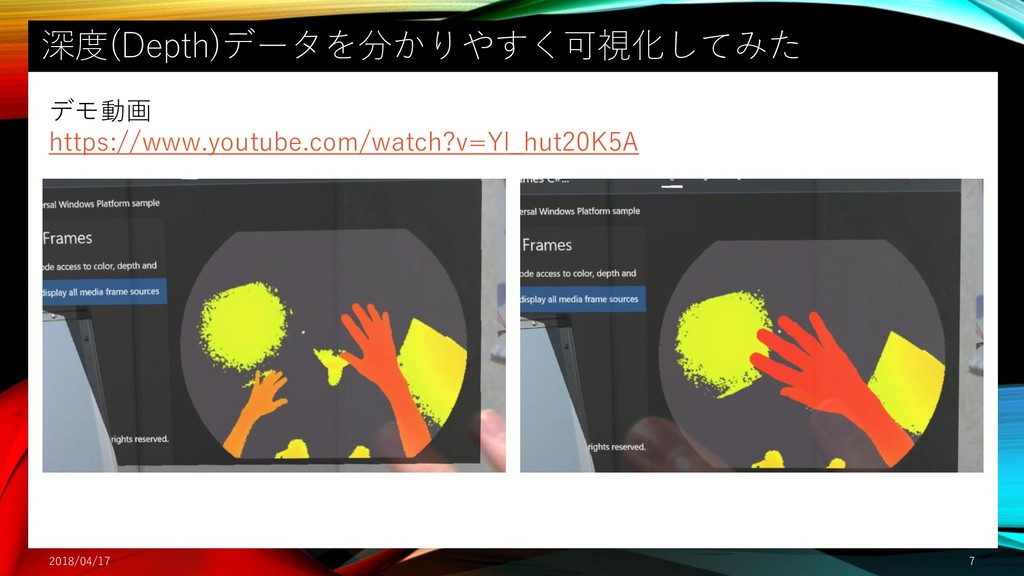
深度(Depth)データを分かりやすく可視化してみた 2018/04/17 6 近距離深度 (ShortThrowToFDepth) 遠距離深度 (LongThrowToFDepth)
深度(Depth)データを分かりやすく可視化してみた 2018/04/17 7 デモ動画 https://www.youtube.com/watch?v=Yl_hut20K5A
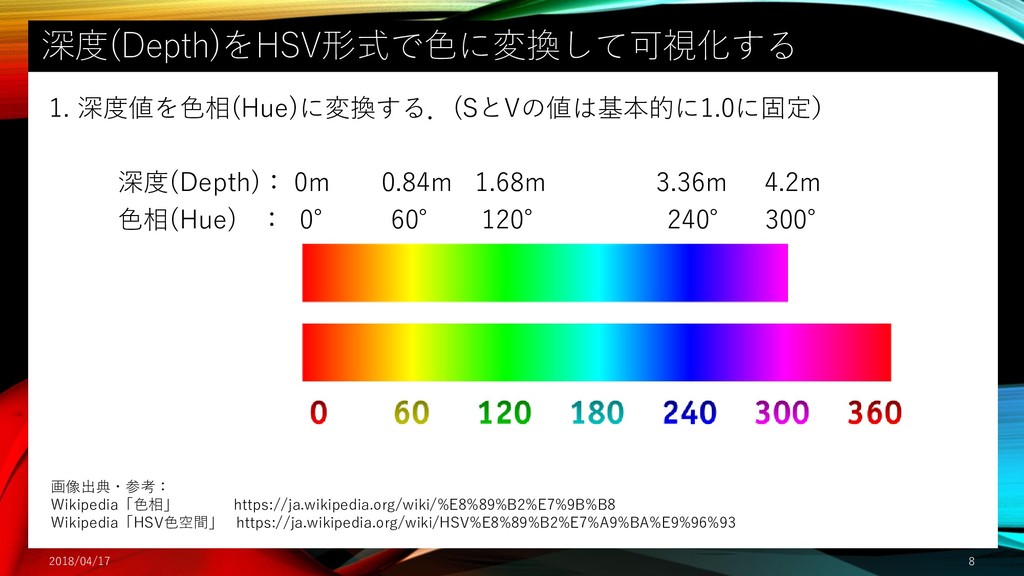
深度(Depth)をHSV形式で色に変換して可視化する 2018/04/17 8 画像出典・参考: Wikipedia「色相」 https://ja.wikipedia.org/wiki/%E8%89%B2%E7%9B%B8 Wikipedia「HSV色空間」 https://ja.wikipedia.org/wiki/HSV%E8%89%B2%E7%A9%BA%E9%96%93 1. 深度値を色相(Hue)に変換する.(SとVの値は基本的に1.0に固定)
深度(Depth): 0m 0.84m 1.68m 3.36m 4.2m 色相(Hue) : 0° 60° 120° 240° 300°
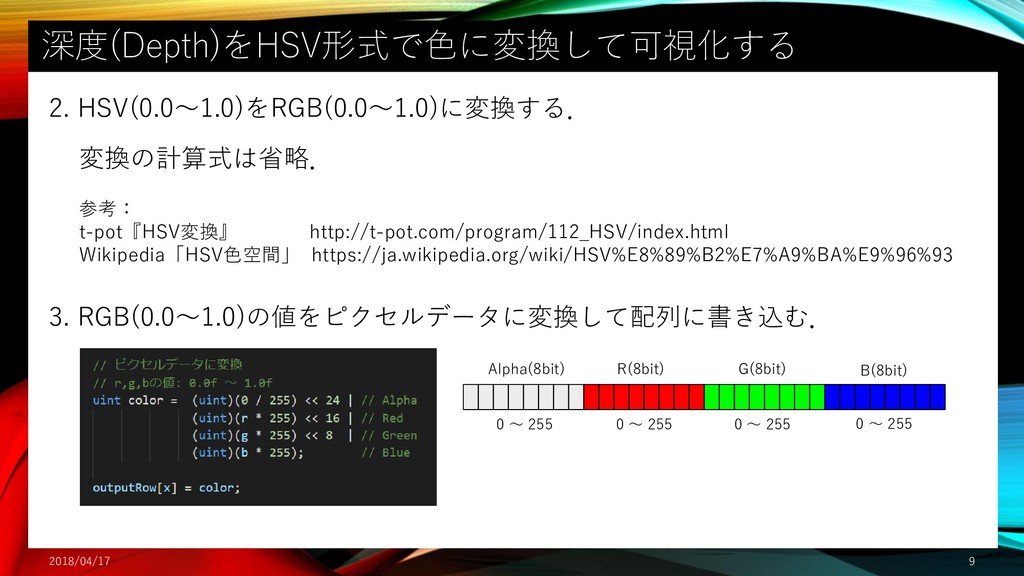
深度(Depth)をHSV形式で色に変換して可視化する 2018/04/17 9 2. HSV(0.0~1.0)をRGB(0.0~1.0)に変換する. Alpha(8bit) R(8bit) G(8bit) B(8bit) 3.
RGB(0.0~1.0)の値をピクセルデータに変換して配列に書き込む. 0 ~ 255 0 ~ 255 0 ~ 255 0 ~ 255 参考: t-pot『HSV変換』 http://t-pot.com/program/112_HSV/index.html Wikipedia「HSV色空間」 https://ja.wikipedia.org/wiki/HSV%E8%89%B2%E7%A9%BA%E9%96%93 変換の計算式は省略.
可視化するために試行錯誤して分かったこと 2018/04/17 10 下記の値から計算した深度値の有効範囲は 0.001 ~ 65.535mだが, 実際の有効範囲より大きすぎるため,可視化にはあまり使えない. DepthMediaFrame.DepthFormat.DepthScaleInMeters: 0.001
DepthMediaFrame.MinReliableDepth: 1 DepthMediaFrame.MaxReliableDepth: 65535 MinReliableDepthとMaxReliableDepthは固定値であり,実行時の 変化は特にない.
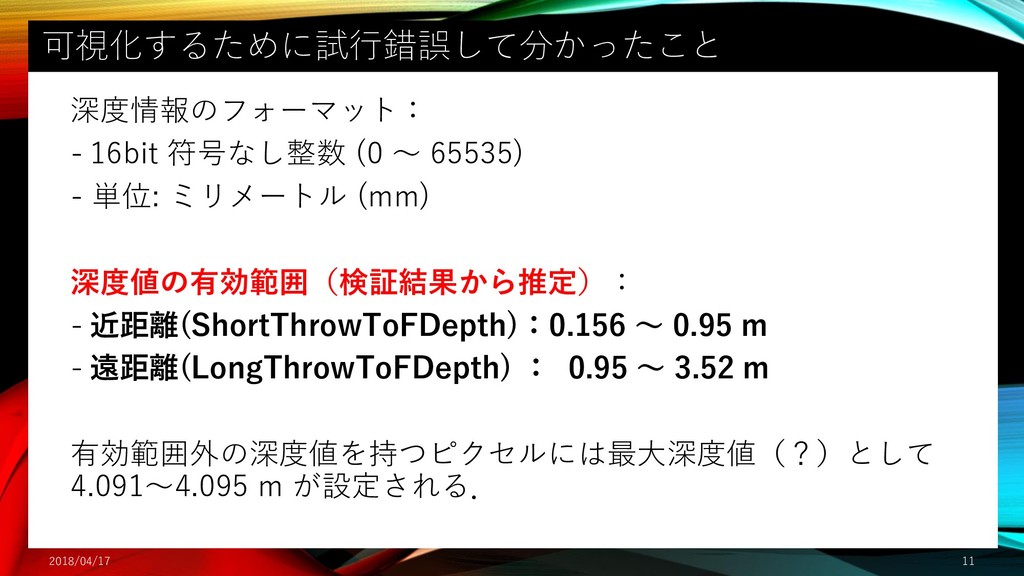
可視化するために試行錯誤して分かったこと 2018/04/17 11 深度情報のフォーマット: - 16bit 符号なし整数 (0 ~ 65535)
- 単位: ミリメートル (mm) 深度値の有効範囲(検証結果から推定): - 近距離(ShortThrowToFDepth):0.156 ~ 0.95 m - 遠距離(LongThrowToFDepth) : 0.95 ~ 3.52 m 有効範囲外の深度値を持つピクセルには最大深度値(?)として 4.091~4.095 m が設定される.
有効範囲外に入った時の変化(近距離深度) 2018/04/17 12 Before
有効範囲外に入った時の変化(近距離深度) 2018/04/17 13 After
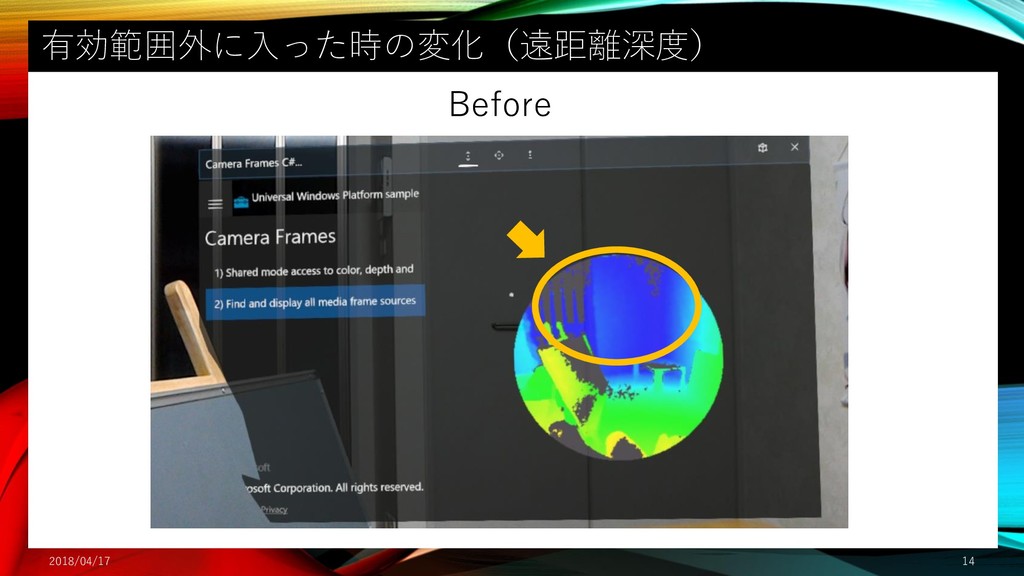
有効範囲外に入った時の変化(遠距離深度) 2018/04/17 14 Before
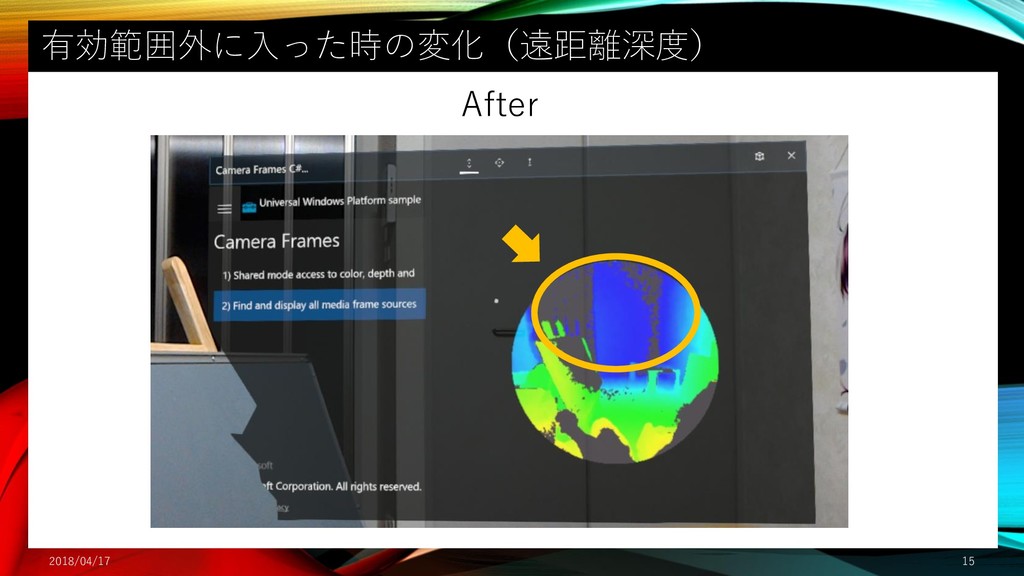
有効範囲外に入った時の変化(遠距離深度) 2018/04/17 15 After
まとめ • Research modeで取得した深度情報を分かりやすく可視化できた • 明暗の違いよりも色の違いの方が識別しやすい • 深度情報の形式と値の有効範囲が分かった • 深度値の有効範囲については追加検証した方が良いかもしれない
(or 公式情報を待つ) 2018/04/17 16
ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}