Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
SmartRig Bipedを使ってみよう / Introduction to SmartRi...
Search
sotanmochi
March 27, 2019
Technology
3.5k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
SmartRig Bipedを使ってみよう / Introduction to SmartRig Biped
sotanmochi
March 27, 2019
More Decks by sotanmochi
See All by sotanmochi
URP/HDRPを使ったVRM対応アプリの開発方法 / VRM Importer Extension
sotanmochi
0
1.8k
画像処理から始めるコンピュートシェーダ / Introduction to Image Processing using Compute Shader
sotanmochi
2
2.7k
Diminished Reality 入門 / Introduction to Diminished Reality
sotanmochi
2
9.5k
Unityでテクスチャにお絵描きするための線分描画アルゴリズムの話 / Line drawing algorithm using fragment shader
sotanmochi
2
4k
MagicOnionでマルチプレイゲームを作ってみる / Introduction to developing multiplayer games using MagicOnion
sotanmochi
1
2.6k
VRMを使ったAR/MR撮影ツールを試作開発してみた話 / Prototype of Mobile Mixed Capture
sotanmochi
0
1.8k
リアルとバーチャルの融合によって越えられない壁を壊す / TechCafe vol.8 LT
sotanmochi
0
300
ユニティちゃんと鬼ごっこができるMRゲームと戦術位置解析システム / Mixed reality game and tactical position analysis
sotanmochi
0
730
Research modeで取得した深度(Depth)データを可視化する / Depth data visualization for Hololens RS4 Research mode
sotanmochi
0
210
Other Decks in Technology
See All in Technology
ソニー銀行におけるビジネスアジリティ向上のためのクラウドシフト戦略
srenext
0
850
シンガポールで登壇してきます
yama3133
0
250
AI時代の開発生産性は、個人技からチーム設計へ
moongift
PRO
4
2.4k
AIレビューはどこまで任せられるのか?自動化と人が背負うレビューの境界
sansantech
PRO
3
1.1k
インフラと開発の垣根を超えていき!〜元AWSインフラエンジニアがAWS開発で奮闘している話〜
hatahata021
3
300
AIが実装を自走する時代の認知負債との戦い
lycorptech_jp
PRO
1
420
Terraform共通モジュールをチーム横断で“変えられる”運用へ ― リリースと適用の分離
kekke_n
1
3.4k
関数型の考えを TypeScript に持ち込んで、テストしやすい純粋関数を増やす / Pure at the Core, Effects at the Edge: Bringing Functional Thinking into TypeScript
kaminashi
2
130
AI Coding Agent時代のcdk-nagガードレール 〜組織ルールを強制CIで守り抜く設計の挑戦〜
mhrtech
3
430
生成AI×AWS CDK×AWS FISで"振り返れる"ミニGameDayをつくろう
yoshimi0227
1
420
Claude Code公式skillで 自分の仕事を少しずつ手放そう!(Claude Code開発ノウハウ大公開スペシャル by クラスメソッド)
kaym
1
500
プロダクト開発組織の現在地(Ver.2026/07) / product-organization
kaonavi
0
120
Featured
See All Featured
SEO Brein meetup: CTRL+C is not how to scale international SEO
lindahogenes
1
2.8k
ラッコキーワード サービス紹介資料
rakko
1
3.9M
What the history of the web can teach us about the future of AI
inesmontani
PRO
1
630
Why You Should Never Use an ORM
jnunemaker
PRO
61
9.9k
Understanding Cognitive Biases in Performance Measurement
bluesmoon
32
3k
Writing Fast Ruby
sferik
630
63k
How to Build an AI Search Optimization Roadmap - Criteria and Steps to Take #SEOIRL
aleyda
1
2.1k
Mobile First: as difficult as doing things right
swwweet
225
10k
The Language of Interfaces
destraynor
162
27k
Amusing Abliteration
ianozsvald
1
230
Are puppies a ranking factor?
jonoalderson
1
3.7k
Claude Code のすすめ
schroneko
67
230k
Transcript
SmartRig Bipedを使ってみよう 2019/03/27 sotan (@sotanmochi)
自己紹介 • sotan (@sotanmochi) • TIS株式会社・戦略技術センター • xR(VR/AR/MR)技術に関する応用研究・プロトタイプ開発 2 VRMを使ったAR/MR撮影ツールを試作開発してみた話
https://speakerdeck.com/sotanmochi/prototype-of-mobile-mixed-capture 2019/03/27 Gotanda.unity #11 色々なデバイスを組み合わせて AR/MRで遊ぶことが趣味です
話の流れ • SmartRig Bipedを使ってみた • パラメータ調整について • まとめ 3 2019/03/27
Gotanda.unity #11
SmartRig Bipedを使ってみた
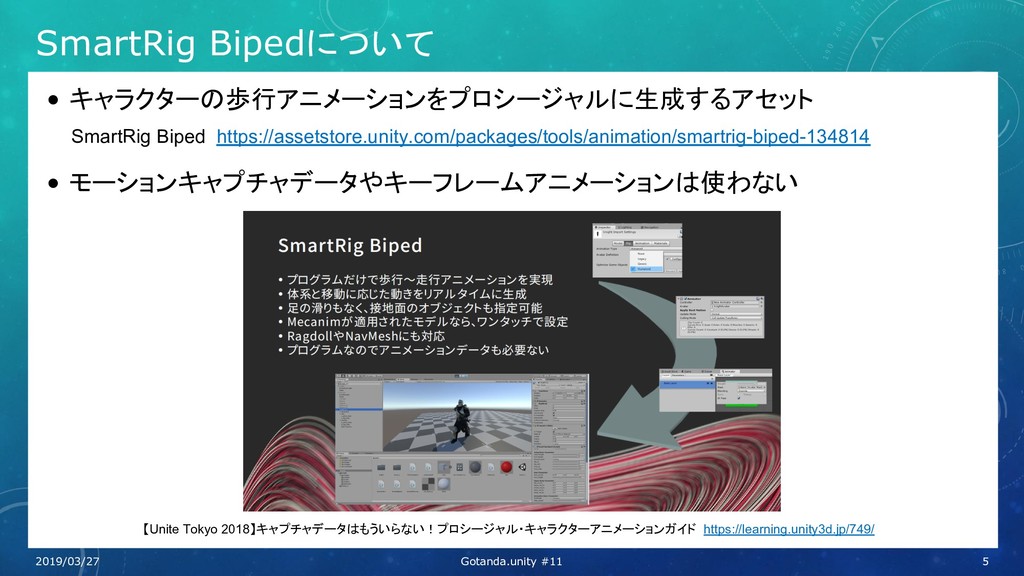
SmartRig Bipedについて • キャラクターの歩行アニメーションをプロシージャルに生成するアセット • モーションキャプチャデータやキーフレームアニメーションは使わない 5 【Unite Tokyo 2018】キャプチャデータはもういらない!プロシージャル・キャラクターアニメーションガイド
https://learning.unity3d.jp/749/ SmartRig Biped https://assetstore.unity.com/packages/tools/animation/smartrig-biped-134814 2019/03/27 Gotanda.unity #11
SmartRig Bipedを使ってみた • デモ動画 https://youtu.be/LlzCTsNxVdc 6 2019/03/27 Gotanda.unity #11 サンプルプロジェクト
https://github.com/sotanmochi/SmartRigBipedSample
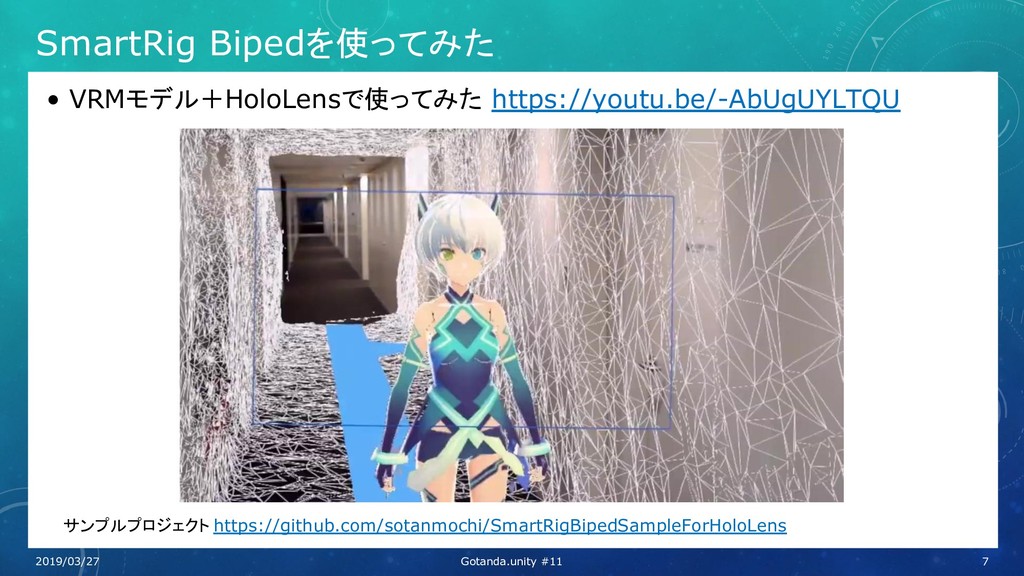
SmartRig Bipedを使ってみた • VRMモデル+HoloLensで使ってみた https://youtu.be/-AbUgUYLTQU 7 2019/03/27 Gotanda.unity #11 サンプルプロジェクト
https://github.com/sotanmochi/SmartRigBipedSampleForHoloLens
SmartRig Bipedの使い方 • SmartRig公式のチュートリアル動画 • Tutorial1 https://youtu.be/MW4jkYSa5Nk • Tutorial2 https://youtu.be/SPMRLJZMoU8
8 2019/03/27 Gotanda.unity #11
パラメータ調整について
パラメータ値の設定例 • スクリプトで修正していないパラメータはデフォルト値のまま 10 2019/03/27 Gotanda.unity #11
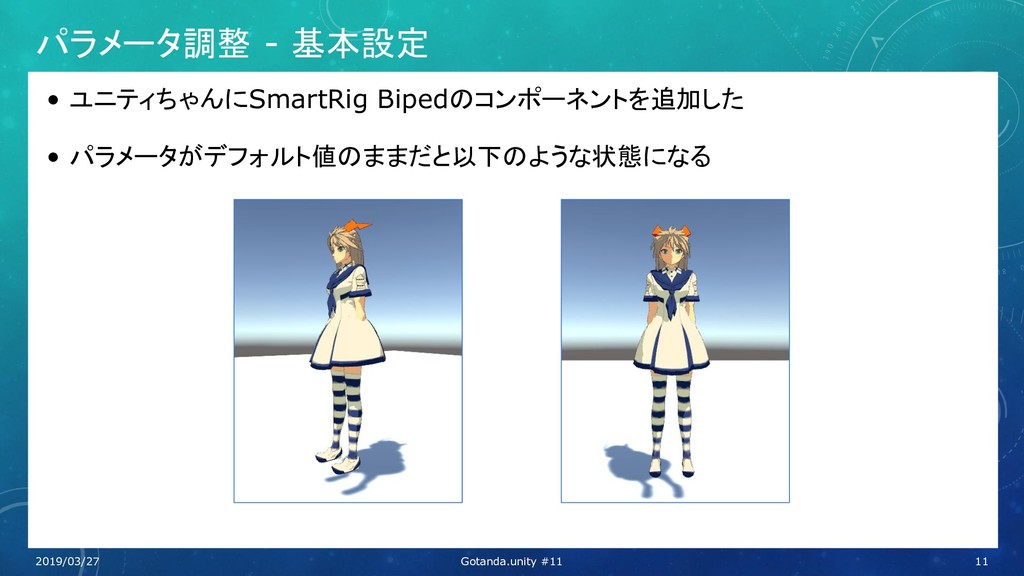
パラメータ調整 - 基本設定 • ユニティちゃんにSmartRig Bipedのコンポーネントを追加した • パラメータがデフォルト値のままだと以下のような状態になる 11 2019/03/27
Gotanda.unity #11
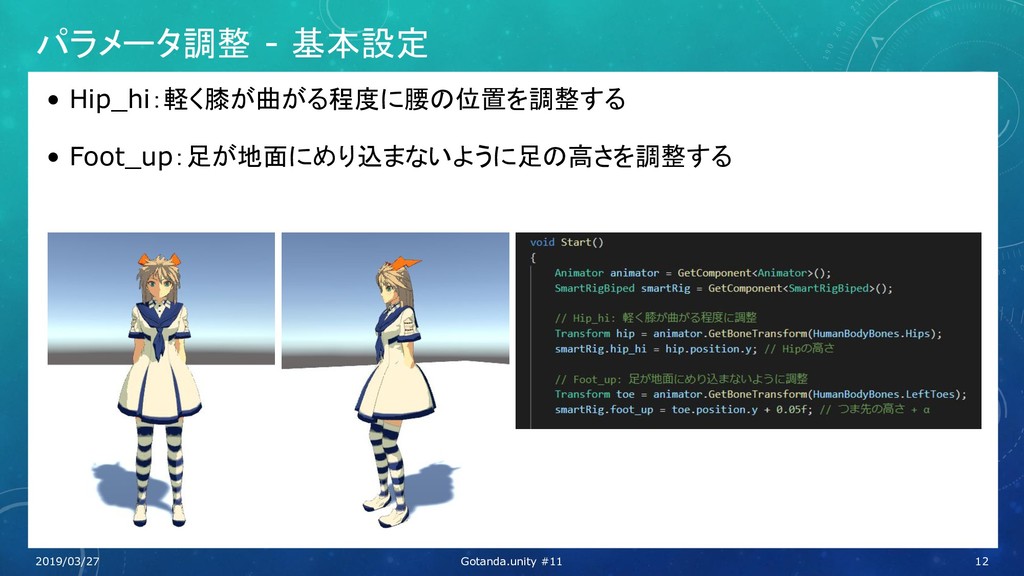
パラメータ調整 - 基本設定 • Hip_hi:軽く膝が曲がる程度に腰の位置を調整する • Foot_up:足が地面にめり込まないように足の高さを調整する 12 2019/03/27 Gotanda.unity
#11
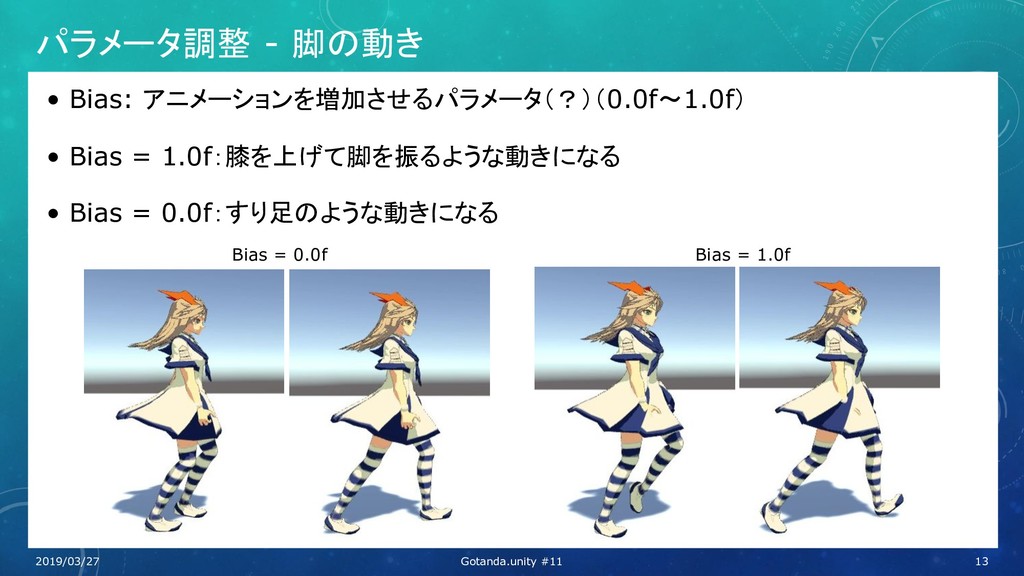
パラメータ調整 - 脚の動き • Bias: アニメーションを増加させるパラメータ(?)(0.0f~1.0f) • Bias = 1.0f:膝を上げて脚を振るような動きになる
• Bias = 0.0f:すり足のような動きになる 13 2019/03/27 Gotanda.unity #11 Bias = 0.0f Bias = 1.0f
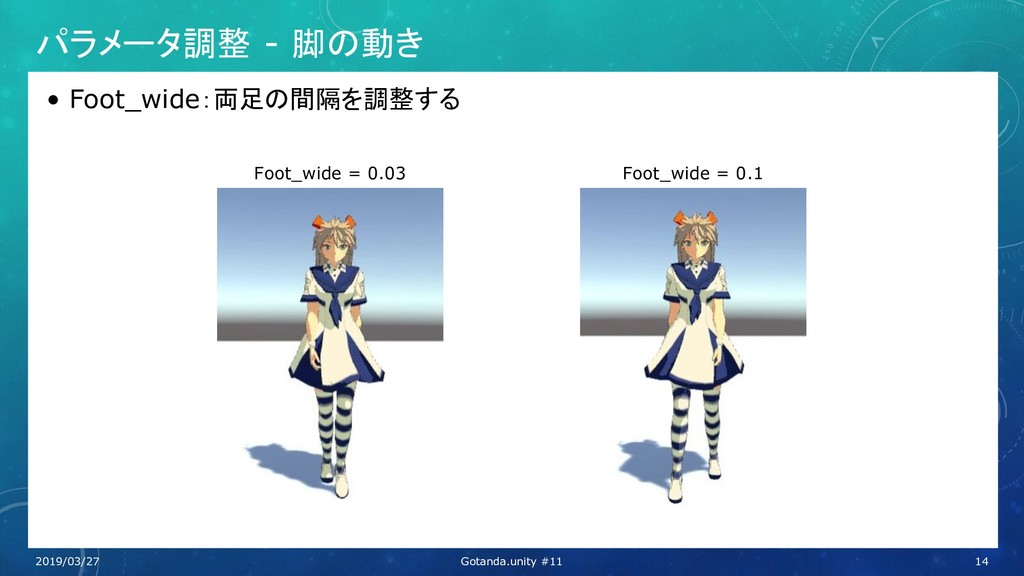
パラメータ調整 - 脚の動き • Foot_wide:両足の間隔を調整する 14 2019/03/27 Gotanda.unity #11 Foot_wide
= 0.03 Foot_wide = 0.1
パラメータ調整 - 腕の動き • Arm_rot_fix:腕の角度を調整する 15 2019/03/27 Gotanda.unity #11 Arm_rot_fix.z
= 0.0f Arm_rot_fix.z = 15.0f Arm_rot_fix.z = 45.0f
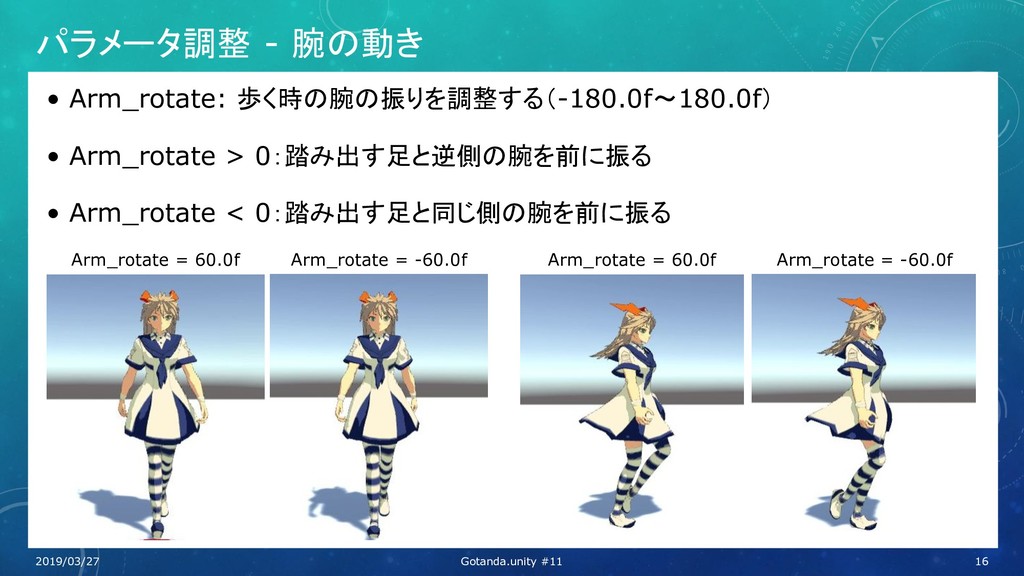
パラメータ調整 - 腕の動き • Arm_rotate: 歩く時の腕の振りを調整する(-180.0f~180.0f) • Arm_rotate > 0:踏み出す足と逆側の腕を前に振る
• Arm_rotate < 0:踏み出す足と同じ側の腕を前に振る 16 2019/03/27 Gotanda.unity #11 Arm_rotate = 60.0f Arm_rotate = -60.0f Arm_rotate = 60.0f Arm_rotate = -60.0f
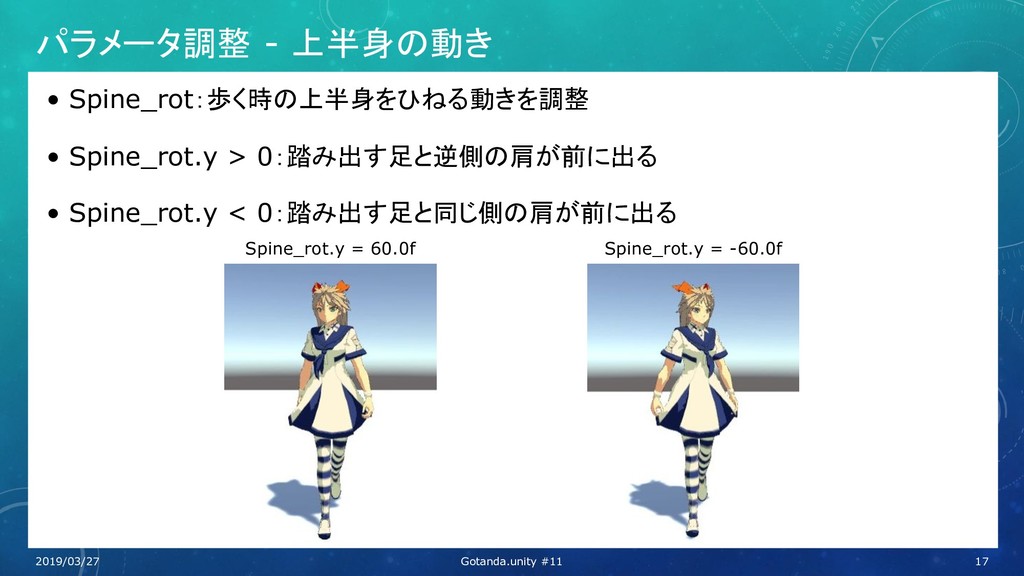
パラメータ調整 - 上半身の動き • Spine_rot:歩く時の上半身をひねる動きを調整 • Spine_rot.y > 0:踏み出す足と逆側の肩が前に出る •
Spine_rot.y < 0:踏み出す足と同じ側の肩が前に出る 17 2019/03/27 Gotanda.unity #11 Spine_rot.y = 60.0f Spine_rot.y = -60.0f
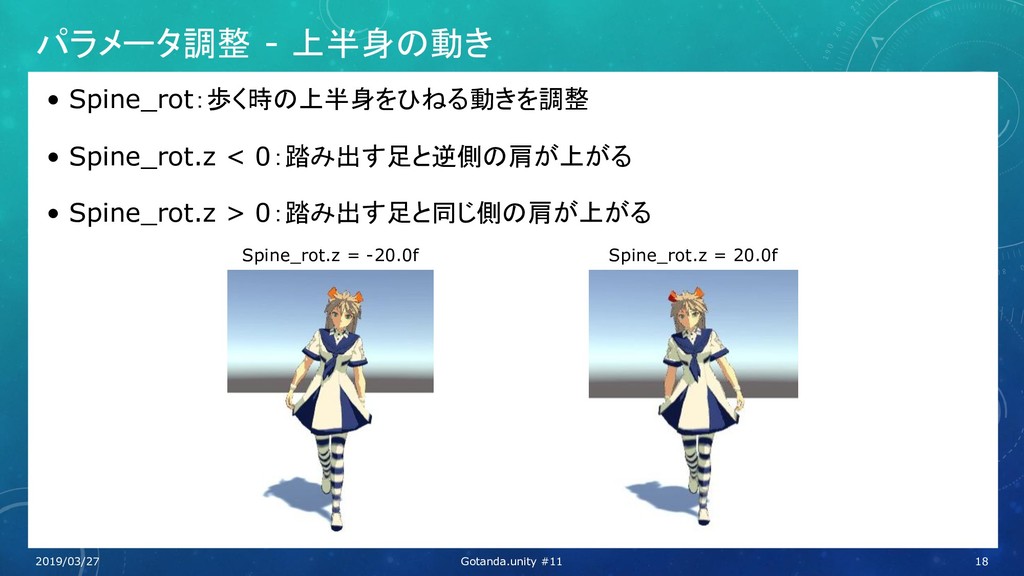
パラメータ調整 - 上半身の動き • Spine_rot:歩く時の上半身をひねる動きを調整 • Spine_rot.z < 0:踏み出す足と逆側の肩が上がる •
Spine_rot.z > 0:踏み出す足と同じ側の肩が上がる 18 2019/03/27 Gotanda.unity #11 Spine_rot.z = -20.0f Spine_rot.z = 20.0f
パラメータ調整 - 頭の動き • Head_rot:歩く時の頭が揺れる動きを調整 • 上半身をひねるように動かす時、 頭を揺らしたくない場合はSpine_rotと近い値に設定しておく (参考) •
Head_rot.y > 0:踏み出す足と逆の方向を見る(右足を踏み出す時に頭は左を向く) • Head_rot.z < 0:前に出した足と逆の方向に頭が下がる(右足を踏み出す時に頭が左に下がる) 19 2019/03/27 Gotanda.unity #11
まとめ
まとめ • SmartRig Bipedは歩行アニメーションをプロシージャルに生成するアセット • ユニティちゃんを歩かせるサンプルを作ってみた • 代表的なパラメータ値の調整について紹介した 21 2019/03/27
Gotanda.unity #11 SmartRig Bipedを使ってみよう!
ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}